Изобретение относится к электротехнике и может быть использовано для механизмов, где необходимо регулирование частоты вращения в широком диапазоне и предъявляются высокие требования к ограничению ускорения
(замедления) и рывка (например, лифты, шахтные подъемные машины и т.п . ) . Цель изобретения - повышение долговечности и надежности работы электропривода путем обеспечения безударного перехода из режима фазового управления в режим частотного управления .
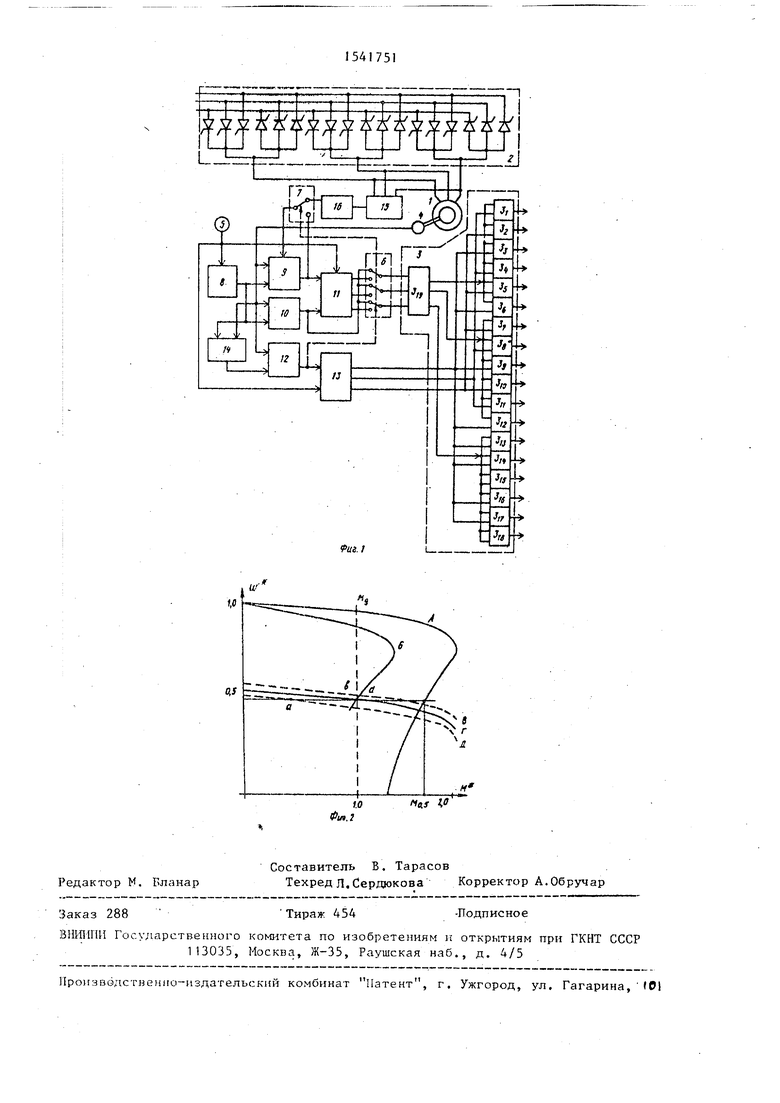
На фиг. 1 изображена структурная схема устройства для управления комбинированным частотно-параметриче
ским л синхронным электроприводом, на фиг, 2 - механические характери- стики электропривода, поясняющие сущность способа управления.
Устройство (фиг.1) содержит асинхронный двигатель 1, циклоконденса- тор 2 с системой 3 импульсно-фазово- го управления (СИФУ), датчик 4 частоты вращения, командоаппарат 5, тре канальный коммутатор 6 и одноканаль- ный коммутатор 7, задатчик 8 интенсивности разгона и торможения, каналы регулирования частоты 9 и амплитуды 10 выходного напряжения преобразователя, задатчик 1 управляющих напряжений низкой частоты (ЗНЧ), бло 12 выбора режимов, схемы 13 блокировки каналов СИФУ, компаратор 14, датчик 15 напряжения и блок 16 формирования начальных условий.
Асинхронный двигатель 1 питается от тиристорного циклоконвертора 2 с СИФУ 3, последняя в каждом канале содержит один из элементов И 3, общий для всех каналов блок 3,д сравнения. Входы многоканального блока 3)д сравнения через трехкянальныи коммутатор 6 подключены либо к выходам ЗИЧ 11, либо к выходу канала 10 регулирования амплитуды выходного напряжения. Командоаппарат 5 соединен с первым входом ЗНЧ 11, входом задатчикя 8 интенсивности и вторым входом схемы 13 блокировки каналов СИФУ. Выход задатчика 8 интенсивности подключен к вторым входам каналов регулирования частоты 9 и амплитуды 10 выходного напряжения циклоконвертора и первому входу компаратора 14. Сигнал с датчика 4 частоты вращения подается на первые входы каналов регулирования частоты 9 и амплитуды 10 выходного напряжения циклооконверторл и блока 12 выбо ра реяимов, а также на второй вход кпаратора 14.
Выход компаратора 14 подключен к второму входу блока 12 выбора режимов . Выход канала 9 регулирования частоты подключен к вторым входам ЗН 11 и одноканального коммутатора 7, первый вход которого подключен к выходу блока 16 формирования начальных условий. Выход коммутатора 7 подключен к третьему входу кэнала 9 регулирования частоты. Три входа датчика 1 напряжения соединены с силовыми выходами циклоконверторп 2, а ею вы
5
0
5
,
g
д 0
35
40
50
ход подключен к входу блока 16 формирования начальных условий. Упряв- ляюшие входы коммутаторов 6 и 7 объединены с первым входом схемы 13 блокировки каналов СИФУ и соединены с выходом блока 12 выбора режимов. Выходы схемы 13 блокировки подключены к соответствующим вторым входам элементов И каналов СИФУ 3.
На фиг. 2 обозначены: А - естественная механическая характеристика двигателя (в о.е.){ Б - механическая характеристика двигателя в режиме фазового управления к моменту перехода в режим частотного управления В,Г,Д механические характеристики двигателя в указанном режиме; М0 - момент двигателя на естественной характеристике при частоте вращения, равной 0,5 номинальной.
В предлагаемом способе управления комбинированным частотно-параметрическим электроприводом на базе во- семнадцативентильного циклоконвертора с системой управления после достижения двигателем половины номинальной скорости производят перестройку системы управления тиристорами циклоконвертора так, что оставшиеся в работе шесть тиристоров (по 2 в каждой фазе, подключенные встречно-параллельно к фазам сети соответственно) образуют симметричную схему фазового управления, обеспечивая разгон двигателя на полную скорость на частоте 50 Гц. Однако при подаче команды на замедление привод сразу переводится в тормозной режим частотного управления, так так производная сигнала задания, вырабатываемая задатчи- ком интенсивности, изменив знак на плюс, вызывает переключение блока выбора режимов в режим частотного управления.
Таким образом, невозможно замедление привода с двигательным моментом, например, при подъеме груза. Для преодоления этого недостатка предложено вместо сигнала производной задания на скорость использовать- сигнал знака момента на валу двигателя, определяемого по знаку рассогласования между сигналом задания на частоту вращения и сигналом частоты вращения двигателя. Тогда, если знак рассогласования отрица- тетный, что соответствует тормозному моменту на валу, привод переводится в режим частотного управления, если знак рассогласования лоложи- тельный, что соответствует двигательному моменту на валу, переключения не происходит, привод остается работать в режиме фазового управления до тех пор, пока частота вращения двигателя не снизится до величины 0,5 номинальной. Таким образом, обеспечивается возможность замедления привода с полной частоты вращения в двигательном режиме. При переходе в режим частотного управления при частоте вращения двигателя 0,5 номинальной в ходе замедления двигатель с характеристики Б (фиг.2) попадает на одну из характеристик режима частотного управления, например характеристики В,Г или Д в зависимости от выходной частоты цикло- конвертора после перехода.
При переходе на характеристику В из точки b в точку d (фиг.2) момент двигателя скачком возрастает, а при переходе на характеристику Д из точки b в точку а - скачком уменьшается. В обоих случаях переход сопровождается значительными колебаниями момента и рывками в передачах, а также колебаниями частоты вращения. С целью устранения этого явления предлагается обеспечить переход на характеристику Г в точке Ь, где момент после перехода равен моменту двигателя до перехода. Для этого-необходимо обеспечить работу циклоконвертора в первый момент времени после перехода с определенного значения выходной частоты. Эта частота может быть представлена, как
где - напряжение, подводимое
к двигателю, в режиме фазового управления перед переходом на режим частотного управления; ин„м номинальное напряжение
двигателя.
Момент двигателя, после перехода должен быть равен моменту до перехода, т.е. должна быть получена характеристика Г (фиг.2), и привод начнет работу в режиме частотного управления из точки Ь. Тогда
15
нпч
- М
(3)
где Ммпч - момент двигателя перехода в режим частотного управления.
Этот момент определяется из соотношения
М
нпч
el-ft,
(4)
где ol - жесткость механической характеристики асинхронного движения в режиме частотного управления (при наличии в системе регулирования режима частотного управления системы стабилизации магнитного потока двигателя).
Подставив (2)
Римеют
НОМ
ли
(5)
НОМ
Тогда, согласно (1 ) выходная частота циклоконвертора после перехода должна иметь значение
ВЫХ
25 +
50 К0,5 1 7ТГ7 и+у i л ико«
(6)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления комбинированным частотно-параметрическим асинхронным электроприводом | 1985 |
|
SU1339863A1 |
| Электропривод с комбинированным частотно-параметрическим управлением | 1989 |
|
SU1686690A1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
| Электропривод переменного тока | 1987 |
|
SU1436260A1 |
| Электропривод с комбинированным управлением частотой вращения | 1983 |
|
SU1223323A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод с экскаваторной характеристикой | 1979 |
|
SU904176A2 |
| Асинхронный электропривод для грузоподъемного механизма | 1986 |
|
SU1451829A1 |
Изобретение относится к электротехнике и может быть использовано в лифтах, шахтных подъемных машинах. Цель изобретения - повышение долговечности и надежности работы электропривода путем обеспечения безударного перехода из режима фазового управления в режим частотного управления. Способ управления комбинированным частотно-параметрическим электроприводом с асинхронным двигателем и восемнадцативентильным циклоконвертором отличается тем, что после подачи команды на снижение частоты вращения двигателя от командоаппарата компаратором фиксируют знак момента, развиваемого двигателем. При положительном моменте частоту понижают в режиме фазового регулирования
при частоте вращения, равной 0,5 номинальной, переходят на режим частотного управления, при этом начальную частоту выходного напряжения циклоконвертора устанавливают согласно выражению Fвых = 25 + 50 M035.Uфу/αUном, где M0,5 - момент двигателя на естественной характеристике при частоте вращения, равной 0,5 номинальной
Uном - номинальное напряжение питания
Uфу - напряжение в режиме фазового управления перед переходом на частотное управление
α - коэффициент, определяющий жесткость механической характеристики асинхронного двигателя в режиме частотного управления. 2 с.п. ф-лы, 2 ил.
Blfx
25 + 50р
(1)
где
ft - абсолютное скольжение двигателя в режиме частотного управления.
Обозначим момент двигателя на естественной характеристике при частоте вращения перехода в режим частотного управления, равной 0,5 номинальной, как М05 (фиг.2). Тогда момент двигателя в режиме фазового управления перед переходом в режим частотного управления равен
MO.S
С
U но
-),
(2)
т.е. должна быть равна 25 Гц плюс величина, пропорциональная квадрату напряжения на выходе преобразователя в режиме фазового управления перед переходом в режим частотного управления .
Устройство (фиг.1) работает следующим образом.
Вначале электропривод работает в режиме частотного управления, при этом ЗНЧ 11 вырабатывает три низкочастотных управляющих сигнала, параметры которых задаются каналами регулирования частоты 9 и амплитуды 10 выходного напряжения циклоконвертора. Эти сигналы через коммутатор б
подаются на многоканальный блок сравнения СИФУ, все каналы которой находятся в работе. При достижении двигателем частоты вращения, равной 0,5 номинальной, по команде блока J 2 выбора режимов коммутатор 6 переключается, в СИФУ 3 блокируются двенадцать каналов из восемнадцати и дальнейший разгон двигателя осуществляется в режиме фазового управления. При подаче сигнала на замедление от командоаппарата 5 задат- ч ик интенсивности формирует линейно спадающий сигнал задания на частоту вращения. Компаратор 14 при этом фик сирует знак рассогласования между э|тим сигналом и сигналом частоты вращения двигателя, снимаемым с датчика 4, т.е. знак момента, развиваемого двигателем.
Если этот знак отрицателен, компаратор вырабатывает сигнал логической 1, что вызывает переключение блока 12 выбора режимов и перевод электропривода в режим частотного Управления, т.е. в режим торможения. Щели скольжение двигателя положительно, т.е. необходим вращающий, а не тормозной момент, то компаратор 14 вырабатывает сигнал логического Г0. При этом блок 12 не переключится до тех пор, пока частоты вращения двигателя не снизится до величины 0,5 номинальной, т.е. снижение частоты вращения от номинальной происходит в режиме фазового управления. В процессе этого производится измерение напряжения на выходе преобразователя датчиком 15 напряжения и формирование сигнала начальных условий в соответствии с (6) блоком 16.
В момент перехода в режим частотного управления коммутаторы 6 и 7 по команде блока 12 переключаются, и на выходе блока 9 в первый момент устанавливается напряжение, определенное в соответствии с (6). При отом к двигателю подводят напряжение с частотой, обеспечивающей работу двигателя на характеристике с вращающим моментом при частоте вра- п(ения двигателя 0,5 номинальной,, в точности равным моменту двигателя перед переходом. Дальнейшее снижение частоты вращения двигателя осуществляется в режиме частотного управления .
5
0
При реализации предлагаемых способа и устройства удается расширить область применения электропривода на механизмы, требующие двигательного момента при замедлении, а также сохранить непрерывность момента двигателя при переходе в режим частотного управления в ходе замедления, что обеспечивает безударный переходный процесс. При этом значительно повышается долговечность и надежность работы электропривода.
Формула изобретения
котором, регулируя частоту и величину напряжения на выходе циклокон- вертора, разгоняют асинхронный двигатель до частоты вращения, равной
5 половине номинальной, после чего, осуществляя фазовое регулирование тиристоров циклоконвертора при постоянной частоте напряжения на его выходе, равной частоте сети, разго-
о няют асинхронный двигатель до номинальной частоты вращения с последующим снижением частоты вращения до нуля путем регулирования частоты и величины напряжения на выходе циклоконвертора, отличающий- с я тем, что, с целью повышения долговечности и надежности путем обеспечения безударного перехода из режима фазового управления в режим
Q частотного управления, после подачи команды на снижение частоты враше- ния двигателя измеряют знак момента, развиваемого двигателем, а при положительном моменте снижение частог ты вращения осуществляют в режиме фазового регулирования, при частоте вращения, равной 0,5 от номинальной, переходят на режим частотного управления, при этом начальную частоту выходного напряжения циклоконвертора
5
0
устанавливают согласно выражению
25 +
-5ГО1 Ьй.и clV
Ном
r«e o,s
d.
-момент двигателя на естественной характеристике при частоте вращения, равной 0,5 номинальной ,
-коэффициент, определяюMOMЧ
щии жесткость механической характеристики асинхронного двигателя в режиме частотного управления;
номинальное напряжение; напряжение в режиме фазового управления перед переходом на частотное управление.
0
5
5
вторыми входами каналов регулирования частоты и амплитуды выходного напряжения преобразователя, первые входы которых объединены с первым входом блока выбора режимов работы и соединены с выходом датчика частоты вращения двигателя, выходы каналов регулирования частоты и амплитуды выходного напряжения преобразователя соединены с вторым и третьим входами задатчика управляющих напряжений низкой частоты, выходы которого соединены с первыми входами трехканального коммутатора, вторые входы которого объединены и соединены с выходом канала регулирования амплитуды выходного напряжения преобразователя, управляющий вход трехканального ком0 мутатора объединен с вторым входом схемы блокировки и соединен с выходом блока выбора режимов работы, выходы трехканального коммутатора соединены с входами многоканального блока сравнения и синхронизации системы им- пульсно-фазового управления, отличающееся тем, что, с целью повышения долговечности и надежности путем обеспечения безударного перехода из режима фазового управления в режим частотного управления, оно снабжено датчиком напряжения, блоком формирования начальных условий, одно- канальным коммутатором и компарато- | ром, причем три входа датчика напря- жения подключены к трем силовым выходам циклоконвертора, а выход датчика напряжения подключен к входу блока формирования начальных услор вий, выход блока формирования началь - ных условий - к первому входу од- ноканального коммутатора, второй вход которого объединен с выходом канала регулирования частоты выходного
5 напряжения преобразователя, а выход одноканального коммутатора подключен к третьему входу канала регулироваг ния частоты выходного напряжения преобразователя, первый и второй входы компаратора подключены соответственно к выходам задатчика интенсивности и датчика частоты вращения двигателя, а выход, компаратора соединен с вторым входом блока выбора режимов работы, а управляющий вход одноканального коммутатора обтединен с управляющим входом трехканяльного коммутатора.
0
5
0
fin t
u 1 1
J I u J
t
t
«j V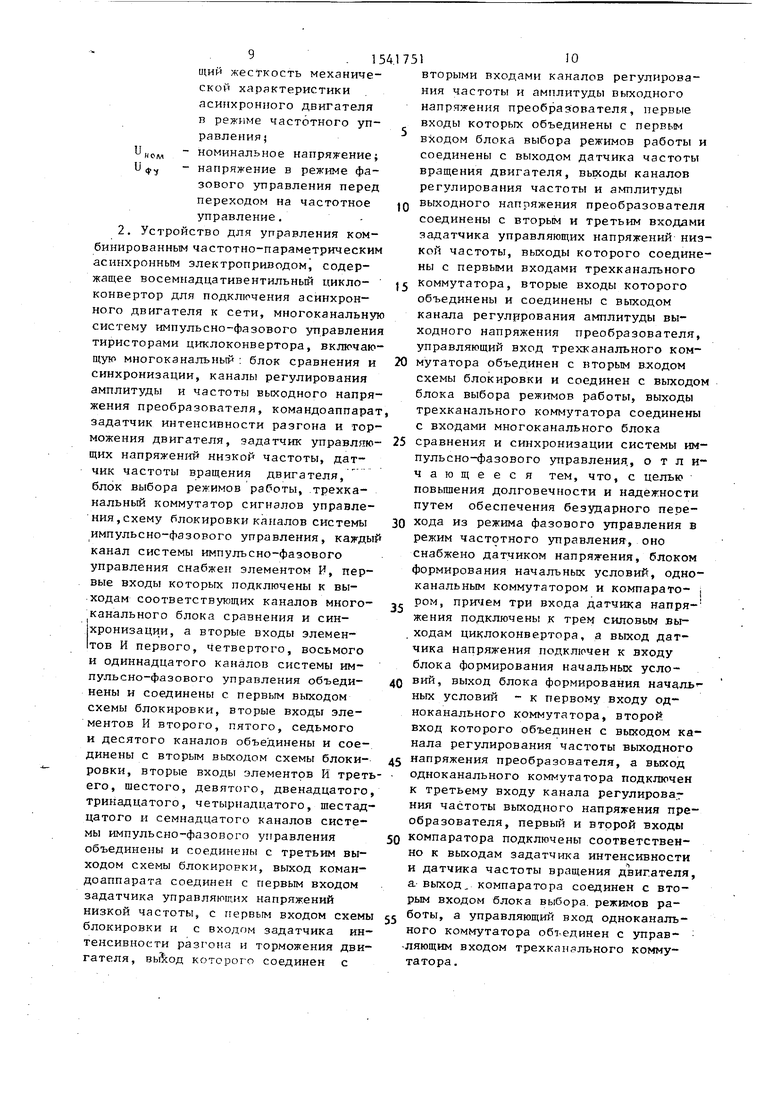
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU944044A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления комбинированным частотно-параметрическим асинхронным электроприводом | 1985 |
|
SU1339863A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с комбинированным управлением частотой вращения | 1983 |
|
SU1223323A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
