Изобретение относится к вспомогательным устройствам для строительства скважин и предназначено для бурения с забойным двигателем как единичных стволов со сложной траекторией, так и скважин с центральным стволом и ответвлениями от него в зоне продуктивных пластов.
Известна телеметрическая система управления измерительным комплексом в процессе бурения [1] , содержащая электрически разобщенную (априори) бурильную колонну, наземный и глубинный блоки, причем глубинный блок, снабженный соответствующими датчиками (функционально не уточнены) параметров, содержит исполнительное программное устройство, по команде (сигналу) с поверхности изменяющее режим функционирования глубинного блока, турбогенератор для электропитания последнего, а также беспроводный электромагнитный канал передачи забойных параметров на поверхность, где антенной-приемником служат буровой станок и выносной штырь-заземлитель. При этом каналом передачи управляющих сигналов с поверхности на исполнительное программное устройство глубинного блока является бурильная колонна, которая формирует тот или иной сигнал механически, когда бурильщик (оператор) в определенной, заранее заданной последовательности изменяет осевую нагрузку, т.е. кодирует сигнал.
Как следует из описания известной системы, та или иная управляющая команда оператора представляет собой изменение осевой нагрузки на долото по определенному аглоритму, и, следовательно, к недостатку известной системы должно отнести то, что она допускает сбой в работе при траектории ствола скважины, отличной от прямолинейной, и тем более при значительных отклонениях от вертикали. При этом требуется прекратить бурение ствола на некоторое время, что крайне нежелательно, а человеческий (исполнительский) фактор приводит к тому, что в случае недостаточной четкости формирования команды с поверхности, да еще в условиях искривленного ствола, эту процедуру надо повторить неоднократно, каждый раз ожидания с глубины подтверждения, что глубинный блок команду принял. Отсюда следует, что известная система способа управлять и допускает это в отношении каких-либо исполнительных устройств, введенных в компоновку низа бурильной колонны, однако не для управления траекторией скважины.
Наиболее близким техническим решением, прототипом, принята телеметрическая компьютеризированная система ЗИС-4М1 [2], содержащая электрически разобщенную бурильную колонну, наземный и глубинный блоки, причем глубинный блок, снабженный соответствующими инклинометрическими датчиками, вмонтирован в немагнитную вставку электрического разделителя бурильной колонны, турбогенератор для электропитания глубинного блока и беспроводный электромагнитный канал передачи параметров на поверхность, где антенной-приемником служит буровой станок и выносной штырь-заземлитель. При этом известной конструкцией не предусмотрена возможность корректировки работы глубинного блока путем подачи ему соответствующих сигналов с поверхности.
Результатом использования известной системы является (при бурении скважин со сложной траекторией ствола) то, что технолог-оператор по общеизвестной методике определяет, на какой угол довернуть бурильную колонну (с учетом уже существующего упругого скручивания ее реактивным моментом забойного двигателя) для необходимого изменения пространственного положения отклонителя в процессе углубления ствола. При этом следует заметить, что глубинный блок известной системы (как правило, совместно с турбогенератором) размещен на расстоянии от забоя от десяти и более метров, в зависимости от конкретной компоновки низа бурильной колонны, и информация на момент ее получения снизу не отражает истинного направления бурения или, иначе, направления поступательного движения долота при углублении ствола.
Требуемый технический результат - обеспечение известной, согласно прототипу, телеметрической системы функцией управления траекторией скважины в процессе бурения с возможностью исполнения заранее заданной программы в автономном режиме.
Это достигается тем, что система управления траекторией скважины, согласно прототипу, содержащая электрически разобщенную бурильную колонну с отклонителем инструмента, компьютеризированный наземный и измерительный (глубинный, с датчиками) блоки, последний из которых герметично вмонтирован в немагнитную вставку электрического разделителя бурильной и подключен к ней выходами по обе стороны этого разделителя, турбогенератор для электропитания глубинного блока, элементы приема (глубинных/информационных) сигналов в виде буровой установки и приемного штыря-заземлителя, электрически соединенных с наземным блоком, снабжена излучающим штырем-заземлителем, электроприводным дискретно-поворотным исполнительным механизмом, являющимся частью компоновки бурильной колонны, вращающийся элемент которого жестко соединен с отклонителем, а корпусная часть, жестко скрепленная с бурильной колонной, снабжена элементами фиксации последней от скручивания реактивным моментом (путем контактирования их со стенкой ствола скважины при запуске и работе забойного двигателя), глубинный блок снабжен микроконтроллером с заложенной в нем дублирующей программой (по управлению траекторией) с соответствующими установками значений проектных зенитных углов и азимутов по стволу, линией электропитания (с ключом и с управляющей связью его с микроконтроллером) между турбогенератором и электроприводным дискретно-поворотным исполнительным мехнизмом, при этом компьютеризированный наземный блок снабжен кодирующим разрядником-излучателем, электрически соединенным с излучающим штырем-заземлителем, а микроконтроллер снабжен приемником кодированного сигнала с наземного блока.
На фиг. 1 изображена общая схема системы управления траекторией скважины, на фиг. 2 - схема глубинного, с датчиками, блока вкупе с электрическим разделителем бурильной колонны, на фиг. 3 - конструкция электроприводного дискретно-поворотного исполнительного механизма (условно), а на фиг. 4 - корпусная часть электроприводного дискретно-поворотного исполнительного механизма с элементами ее фиксации от вращения.
Система управления траекторий скважины содержит (фиг. 1) бурильную колонну 1 с отклонителем 2 над силовым приводом 3 породоразрушающего инструмента 4, компьютеризированный наземный блок 5, глубинный блок 6 с датчиками 7 зенитного угла (γт) и азимута (αт). Бурильная колонна содержит в компоновке электрический разделитель 8 с немагнитной вставкой 9 (фиг. 2), при этом глубинный блок 6 герметично вмонтирован в последнюю. Колонна 1 содержит также турбогенератор 10 для электропитания глубинного блока, который выходами соединен с немагнитной вставкой 9 электрического разделителя 8 (фиг. 2). На земной поверхности система управления снабжена двумя элементами 11 и 12 для приема глубинного информационного сигнала (Uи), одним из этих элементов, 11, является сама буровая установка (фиг. 1, показана условно), а другим элементом, 12, приема сигнала является приемный штырь-заземлитель. Наземный блок 5 содержит: разрядник 13, электрически соединенный с излучающим штырем-заземлителем 14 для передачи управляющего сигнала (Uγ) наземного блока в скважину, например по команде оператора (Kо); элемент приема информационных сигналов 15, электрически соединенный с буровой установкой 11, приемным штырем-заземлителем 12 и компьютером 16, соединенным с разрядником 13. Над отклонителем 2 в состав бурильной колонны введен также электроприводной дискретно-поворотный исполнительный механизм 17 с шиной 18 электропитания его от турбогенератора 10. Глубинный блок 6, помимо датчика углов, снабжен микроконтроллером 19 с приемником 20 наземных управляющих сигналов; входы приемника подсоединены к концам немагнитной вставкой 9 (фиг. 2, справа). Глубинный блок 6 содержит ключ 21 с управляющей связью 22 от микроконтроллера 19 для организации напряжения питания и подачи его по шине 18 электропитания к электроприводу 23 электроприводного дискретно-поворотного исполнительного механизма 17, содержащего вращающееся ведомое звено 24 (фиг. 3). Корпус 25 электропривода 23, являющийся частью компоновки бурильной колонны, содержит элементы 26 фиксации его от крутильных движений (под действием реактивного момента силового привода породоразрушающего инструмента), то есть от вращения, так как реактивный момент является величиной переменной, зависящей от целого ряда факторов. Элементы 26 электроприводного дискретно-поворотного исполнительного механизма 17 выполняют, например, в виде дугообразных лезвий-пружин, заневоленных в корпусе 25 и контактирующих со стенкой скважины, как изображено на фиг. 4 (условно). Датчики 7 текущих значений углов траектории скважины выходами (на фиг. 2 отдельной позиций не отмечены) соединены с микроконтроллером 19, который содержит в себе штатную программу с проектными значениями зенитных углов (γп) и азимутов (αп) ствола по его глубине (с отсчетом от высотной отметки устья скважины).
Система управления траекторией скважины работает следующим образом. Поскольку она функционально предназначено к использованию в процессе бурения, то в память микроконтроллера 19 глубинного блока 6 и в память компьютера 16 - до начала управления траекторией ствола конкретной скважины - вводят проектные значения углов (зенитного γп и азимута αп) с заданным шагом дискретности или по длине ствола, или по вертикали (от геодезической высотной отметки устья скважины), например через 10 метров. В процессе бурения система по заранее заданной, штатной, программе производит опрос датчиков 7 текущих углов (γт и αт) траектории ствола и сравнивает их значения с проектными, γп и αп, соответствующими конкретной (длине) глубине ствола. В случаях, когда [γп-γт]≥Δγ и [αп-αт]≥Δα, система (в автономном режиме) корректирует пространственное положение отклонителя 2, так как Δγ и Δα есть не что иное, как шаги дискретности при сравнении значений соответствующих углов. Так, например, системе, то есть ее блокам 5 и 6, могут быть заданы оба шага дискретности в 5o, то есть одинаковыми для зенитного угла и азимута. При этом система должна быть укомплектована датчиками 7 с чувствительностью (к изменению угла) на порядок выше, чем задаваемый системе шаг дискретности при сравнениях значений соответствующего угла. Как понятно из компоновки бурильной колонны (фиг. 1), корректировка пространственного положения отклонителя 2 осуществляется с помощью электроприводного дискретно-поворотного исполнительного механизма 17 при зафиксированном от вращения корпусе 25, элементы 26 которого контактируют со стенкой скважины по образующей. Электроприводной дискретно-поворотный исполнительный механизм 17 через управляемый микроконтроллером 19 ключ 21 подключается к источнику электропитания, то есть к турбогенератору 10, на строго регламентированное время, пропорциональное требуемому изменению углового пространственного положения отклонителя. Как правило, датчики 7 глубинного блока 6 работают в режиме постоянного измерения углов и их информационные сигналы (Uи) поступают как в наземный блок 5, так и в микроконтроллер 16, однако последний дает команду на вышеописанную корректировку траектории ствола только при достижении разности между текущими и проектными значениями угла не менее заданного шага дискретности. При необходимости специалист-оператор посредством соответствующей команды (Kо) компьютеру 16 изменяет режим работы системы (частота опроса датчиков, изменение проектных значений углов, переход блока 6 только в измерительный режим, корректирующее воздействие на исполнительный поворотный механизм при задании блоку 6 системы шага дискретности, например в 10 - 20o, и т.п.), для чего в состав наземного блока 5 введен разрядник 13, формирующий соответствующий управляющий сигнал (Uγ), который воспринимается приемником 20 глубинного блока; приемно-передающей антенной (и корпусом) последнего служит немагнитная вставка 9 (фиг. 2) электрического разделителя 8 бурильной колонны. Элементами антенны наземного блока служат буровая установка 11 и штыри-заземлители 12 и 14, при этом информационный глубинный сигнал (Uи) с блока 6 принимается антенной из элементов 11 и 12, а излучение управляющего сигнала (Uγ) на блок 6 осуществляют с антенны из элементов 11 и 14.
Описание работы необходимо дополнить тем, что возможен и осуществим вариант заявленной системы управления траекторией скважины в процессе бурения без защиты бурильной колонны от крутильных колебаний изменяющимся реактивным моментов забойного двигателя 3, однако это существенно осложняет работу блоков 5 и 6. При таком режиме работы системы наличествует постоянный дрейф показаний датчиков углов и требуется включать в процесс управления исполнительным механизмом и соответственно в корректировку пространственного положения отклонителя осреднение мгновенных значений измеряемых датчиками углов за какой-то временной интервал, при этом еще необходимо учитывать поправку на угол упругого закручивания бурильной колонны длиной до 5000 метров. Отсюда следует, что управляющее воздействие на отклонитель неизбежно и хронически будет запаздывать от реальной ситуации в скважине, а это не способствует оперативности управления траекторией.
Для полноты описания заявляемого объекта отметим, что компьютеризованный наземный блок 5 обеспечивает специалиста-оператора визуальной графической информацией (по трем пространственным координатам) о траектории ствола скважины, так же как и известные компьютеризированные системы контроля за процессом бурения, но более оперативно и достоверно, так как обеспечено дублирование программы микроконтроллером глубинного блока.
Отметим, что из общедоступных источников информации (в том числе и патентных) не выявлены устройства, идентичные заявленной системе управления траекторией скважины с совокупностью существенных признаков, в том числе и отличительных, эквивалентных совокупности существенных признаков объекта настоящей заявки. Это позволяет утверждать, что настоящее техническое решение удовлетворяет "критериям" изобретения, в связи с чем подлежит защите охранным документом изобретательского права согласно заявлению авторов.
Источники информации
1. СССР, а.с. N 1282599, E 21 B 44/00, 1984.
2. Научно-технический журнал "Автоматизация, телемеханизация и связь в нефтяной промышленности", N 9-10, М.: ОАО ВНИИОЭНГ, 1998, с. 16, прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКИЙ РАЗДЕЛИТЕЛЬ БУРИЛЬНОЙ КОЛОННЫ | 2006 |
|
RU2307931C1 |
| СИСТЕМА ИЗМЕРЕНИЙ ЗАБОЙНОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ БУРЕНИЯ "ГИРОКУРС" | 1994 |
|
RU2087705C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 1994 |
|
RU2105880C1 |
| СКВАЖИННЫЙ ЭЛЕКТРОМАШИННЫЙ ИСТОЧНИК ПИТАНИЯ | 2005 |
|
RU2290734C1 |
| КОМПОНОВКА НИЗА БУРИЛЬНОЙ КОЛОННЫ ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2148696C1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| Телеметрическая система с комбинированным бескабельным каналом связи для передачи данных в процессе бурения скважин | 2016 |
|
RU2643395C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКЛОНИТЕЛЕМ ПРИ БУРЕНИИ СКВАЖИНЫ КОМПОНОВКОЙ С ЗАБОЙНЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2144604C1 |
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ НАКЛОННО-НАПРАВЛЕННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2004 |
|
RU2278236C1 |
| ЭЛЕКТРИЧЕСКИЙ РАЗДЕЛИТЕЛЬ ДЛЯ СКВАЖИННЫХ ТЕЛЕСИСТЕМ | 2003 |
|
RU2232890C1 |



Система управления траекторией скважины в процессе бурения относится к вспомогательным устройствам для строительства скважины и предназначена для бурения с забойным двигателем. Система содержит разобщенную электрическим разделителем с немагнитной вставкой бурильную колонну, компьютеризированный наземный блок, приемный и излучающий штыри-заземлители и глубинный блок с датчиками зенитного угла и азимута. Глубинный блок вмонтирован в немагнитную вставку и подключен к ней по обе стороны от электрического разделителя. Глубинный блок снабжен ключом и подключенным к выходам датчиков зенитного угла и азимута микроконтроллером с приемником наземных управляющих сигналов. В состав бурильной колонны входит отклонитель, расположенный над силовым приводом породоразрушающего инструмента. Буровая колонна также снабжена электроприводным дискретно-поворотным исполнительным механизмом (ЭДПИМ). Последний выполнен в виде жестко соединенного с отклонителем вращающегося ведомого звена, размещенного в корпусе, который жестко соединен с бурильной колонной. Корпус ЭДПИМ имеет элементы фиксации его от поворотов реактивным моментом забойного двигателя. Для электропитания глубинного блока и ЭДПИМ используется турбогенератор. При этом на линии электропитания ЭДПИМ расположен ключ, управляющий вход которого соединен с микроконтроллером. Компьютеризированный наземный блок содержит элемент приема информационных сигналов и разрядник. Разрядник электрически соединен с излучающим штырем-заземлителем, а элемент приема информационных сигналов - с приемным штырем-заземлителем и буровой установкой. Система позволяет управлять траекторией скважины в процессе бурения с возможностью исполнения заранее заданной программы в автономном режиме. 4 ил.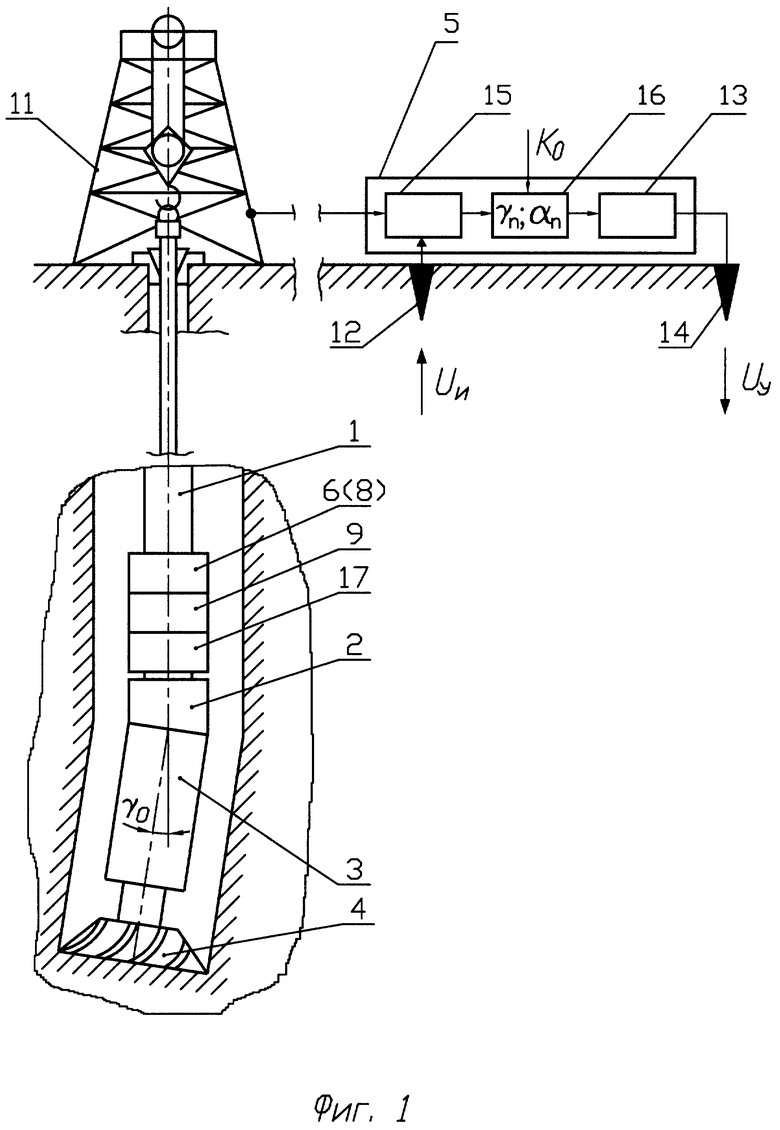
Система управления траекторией скважины в процессе бурения, содержащая разобщенную электрическим разделителем с немагнитной вставкой бурильную колонну с отклонителем, вмонтированный в немагнитную вставку глубинный блок с датчиками зенитного угла и азимута и подключенный к ней по обе стороны от разделителя, турбогенератор, электрически соединенный с глубинным блоком, компьютеризированный наземный блок, содержащий элемент приема информационных сигналов, соединенный с компьютером, отличающаяся тем, что она снабжена выносным приемным и излучающим штырями-заземлителями, установленными на земной поверхности, наземный блок снабжен подключенным к управляющему выходу компьютера разрядником, электрически соединенным с излучающим штырем-заземлителем, элемент приема информационных сигналов электрически соединен с буровой установкой и приемным штырем-заземлителем, бурильная колонна снабжена установленным над отклонителем электропроводным дискретно-поворотным исполнительным механизмом, выполненным в виде вращающегося ведомого звена, размещенного в корпусе, имеющем элементы фиксации от совместного с колонной поворота реактивным моментом вращающего породоразрушающий инструмент силового привода, глубинный блок снабжен ключом и подключенным к выходам датчиков зенитного угла и азимута микроконтроллером с приемником наземных управляющих сигналов, входы которого присоединены с концам немагнитной вставки, отклонитель расположен над силовым приводом породоразрушающего инструмента, а электроприводной дискретно-поворотный исполнительный механизм соединен с турбогенератором посредством линии электропитания через ключ, управляющий вход которого соединен с микроконтроллером, корпус электроприводного дискретно-поворотного исполнительного механизма жестко соединен с бурильной колонной, а вращающееся ведомое звено жестко соединено с отклонителем.
| КАМНЕВ Ю.М | |||
| и др | |||
| Система КТТС для информационного обеспечения процесса бурения наклонно направленных, горизонтальных и разведочных скважин | |||
| "Автоматизация, телемеханизация и связь в нефтяной промышленности", N 9-10, М., ОАО ВНИИОЭНГ, 1998, с.16 | |||
| СПОСОБ УПРАВЛЕНИЯ ЗАБОЙНЫМ ИЗМЕРИТЕЛЬНЫМ КОМПЛЕКСОМ В ПРОЦЕССЕ БУРЕНИЯ | 1984 |
|
SU1282599A1 |
| Устройство для управления процессом бурения | 1980 |
|
SU898048A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОДВИЖНЫМИ СИСТЕМАМИ СКВАЖИННЫХ ПРИБОРОВ | 0 |
|
SU211469A1 |
| СПОСОБ УПРАВЛЕНИЯ НАПРАВЛЕННЫМ БУРЕНИЕМ НАКЛОННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2123108C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ТЕМПЕРАТУРЫ СОДЕРЖИМОГО СОСУДА | 1992 |
|
RU2043747C1 |
| US 4181014 A, 01.01.1980 | |||
| US 4582147 A, 15.04.1986. | |||

