Изобретение относится к бурению нефтяных, газовых и разведочных скважин и может быть использовано для управления траекториями горизонтальных и сильнонаклоненных скважин в процессе механического долбления без применения традиционных телеметрических систем для передачи непрерывной информации с призабойной зоны на поверхность к устью скважины.
Ориентирование направляющих отклоняющих устройств является важнейшим условием успешной проводки направленных, например горизонтальных, скважин, бурящихся вдоль продуктивных пластов.
Для ориентирования отклоняющих устройств в процессе механического долбления служат отечественные системы [1, 2] и большой ассортимент зарубежных [3].
Все указанные системы требуют наличия сложной дорогой телеметрической системы и поэтому, несмотря на технические совершенства, их применение может оказаться экономически неоправданным.
В качестве прототипа выбрана система геомагнитного азимутального кругового обзора для ориентации устройств направленного бурения [4], содержащая бурильную колонну с немагнитными трубами, ротор буровой установки с приводом, глубинный клапан, управляемый гидравлическим усилителем, расположенным над отклонителем, и датчик давления бурового раствора, установленный на входе в бурильную колонну. С целью повышения точности ориентации в скважинах с неограниченным в сторону уменьшения зенитным углом система снабжена глубинным датчиком геомагнитной азимутальной ориентации, установленным внутри немагнитных труб и выполненным в виде размещенных в корпусе на оси вращения силового магнита и рычага, жестко связанного с осью вращения и расположенного между упором и ограничителем, установленными на корпусе, при этом рычаг размещен на оси вращения с возможностью взаимодействия со входом гидравлического усилителя.
Прототип позволяет ориентировать отклонение относительно горизонтальной составляющей геомагнитного поля только при зенитных углах примерно менее  и исключает ориентацию при бурении горизонтальных скважин, требует наличия немагнитных труб в зоне размещения датчика и наличия силового магнита.
и исключает ориентацию при бурении горизонтальных скважин, требует наличия немагнитных труб в зоне размещения датчика и наличия силового магнита.
Целью изобретения является создание системы, обеспечивающей экономичную проводку сильнонаклоненных, особенно горизонтальных, скважин в пластах средней и большой мощности.
Ожидаемый положительный эффект при использовании заявленного изобретения заключается в возможности массового разбуривания горизонтальных скважин без применения дорогостоящих телеметрических систем и без необходимости частых опусканий приборов на каротажном кабеле или с другими средствами транспортирования. Изобретение представляет собой систему для определения положений отклонителя относительно вертикали и управления отклонителем в заданной плоскости ориентации на горизонтальных участках скважины либо сильнонаклоненных (к вертикали) без ограничения зенитного угла (в сторону его увеличения вплоть до π/2 и более). Это обеспечивается отсчетом положения координаты плоскости отклонителя непосредственно от координаты гравитационного поля земного притяжения, обеспечиваемым глубинным датчиком. Подвижная часть этого датчика, условно называемая ротором, представляет один из гравитационных чувствительных элементов, например физический маятник, отвес либо аксельрометр, измеряющий угол, отсчитываемый от направления земного ускорения, а неподвижная часть, условно называемая статором, жестко связана с отклонителем. Показания датчика снимаются за счет срабатывания гидравлического клапана на поверхности с помощью проведения процедуры кругового обзора - поворотом верхнего конца бурильной колонны приводом ротора либо верхнего вращателя.
Существенное отличие предлагаемого изобретения от прототипа заключается в том, что отсчет производится не в азимутальной, а в зенитной плоскости, что обеспечивает работу в горизонтальных скважинах, не требуя ни немагнитных труб, ни магниточувствительных элементов.
Одновременно измеряется момент, затрачиваемый на привод ротора (верхнего вращателя) при плавной подаче верхнего конца бурильной колонны.
В настоящее время при массовом применении горизонтального бурения вопросы выдерживания траектории вдоль пласта остаются проблемой, ибо использование телеметрических систем может оказаться нерентабельным особенно при разработке пластов средней и большой мощности, когда нет необходимости в высокой точности по зениту и азимуту. В то же время спуск инклинометрических средств на каротажном кабеле очень затруднителен при прохождении сильно наклоненного горизонтального участка. Спуск и подъем автономных каротажных средств целесообразно проводить вместе с бурильной колонной. Сочетание применения системы по заявленному изобретению с указанными автономными каротажными средствами сулит большие перспективы по управлению траекториями скважин, бурящихся вдоль пластов.
Система содержит бурильную колонну, привод ее вращения, глубинный клапан, управляемый усилителем, расположенным над отклонителем, и датчик давления бурового раствора, установленный на входе в бурильную колонну. Для возможности управления отклонителем при проводке горизонтальных и сильнонаклоненных скважин предлагается глубинный датчик гравитационной ориентации, выполненный в виде размещенной в корпусе, жестко скрепленной с отклонителем инерционной массы, имеющей возможность вертикального перемещения, преодолевая усилия пружин с упорами, закрепленными на корпусе.
С инерционной массой жестко связан рычаг, который при ее перемещении имеет возможность воздействовать на механоэлектрический преобразователь и через него на вход электрогидравлического усилителя.
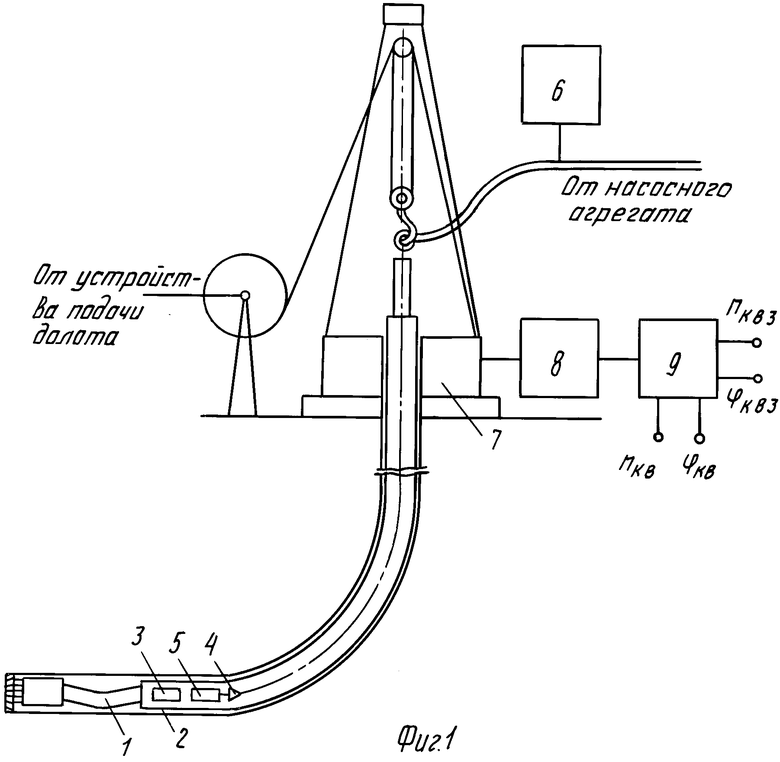
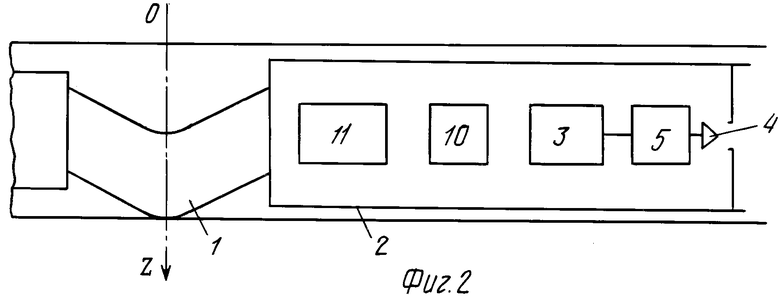
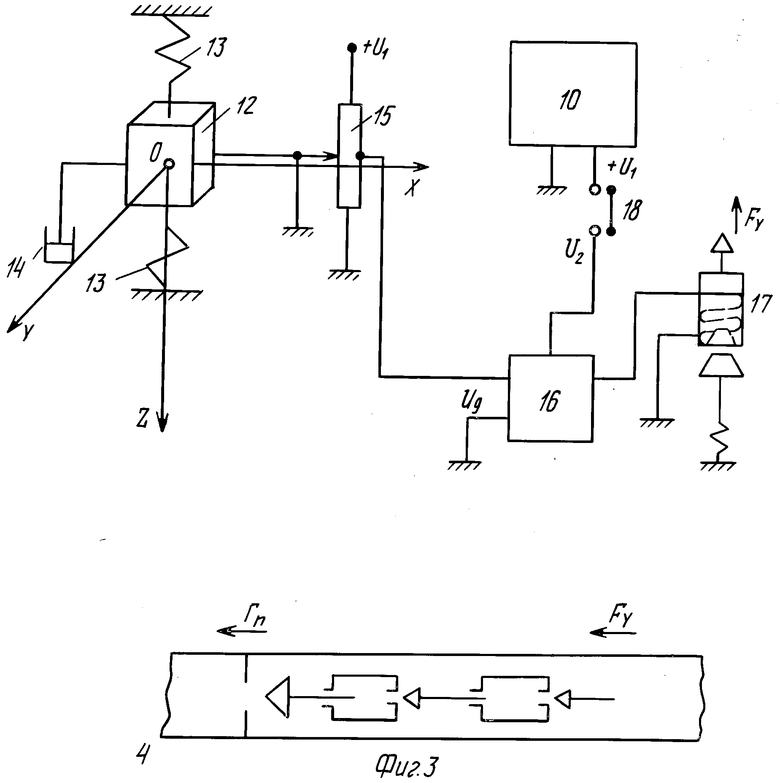
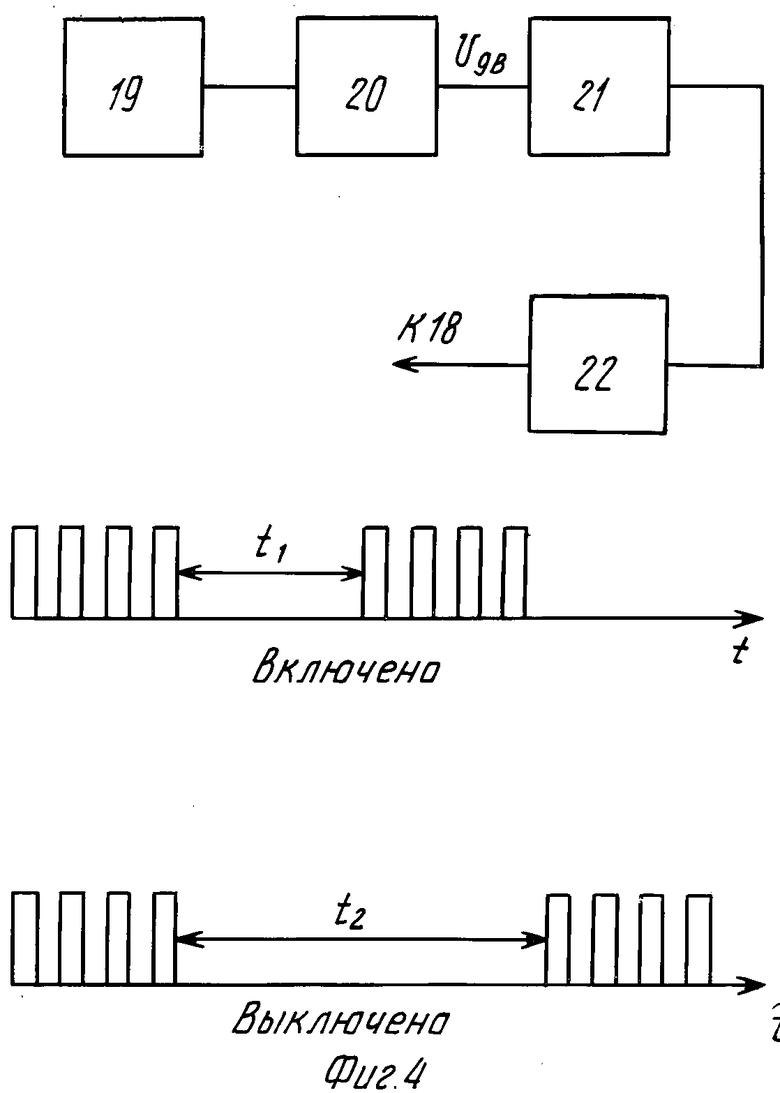
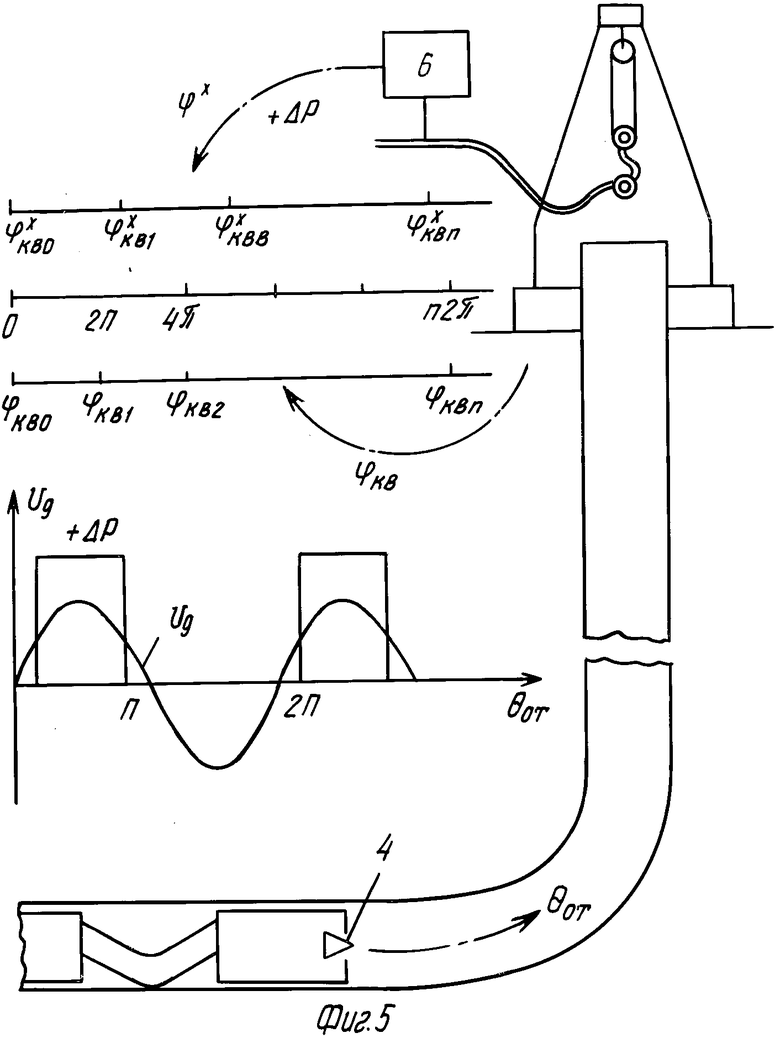
На фиг. 1 изображена принципиальная конструктивная схема системы гравитационного зенитного обзора для ориентации устройств направленного бурения горизонтальных и сильно наклоненных скважин ("СОГБ"); на фиг. 2 - принципиальная конструктивная схема глубинного устройства системы "СОГБ"; на фиг. 3 - принципиальная схема выполнения датчика ориентации усилителя и других элементов глубинной части системы "СОГБ"; на фиг. 4 - принцип работы выключателя источника питания, наиболее энергоемкого элемента глубинной части системы "СОГБ"; на фиг. 5 - взаимодействие глубинной и наземной частей системы "СОГБ" для ориентации направляющей грани отклонителя методом гравитационного кругового обзора.
Система "СОГБ" содержит бурильную колонну, глубинную часть, установленную в призабойной зоне, и наружный комплекс, размещенный на устьевой площадке буровой установки.
В глубинную часть входит компоновка низа бурильной колонны (КНБК), включающая наряду с долотом, забойным двигателем и стабилизаторами отклонитель 1. Внутри труб переводника 2 над отклонителем 1 расположены датчик 3 гравитационной зенитной ориентации и глубинный клапан 4, управляемый электрогидравлическим усилителем 5.
В наружный комплекс входит датчик 6 давления бурового раствора, который установлен на входе в бурильную колонну и предназначен для фиксаций (регистрации) сигнала увеличения давления на Δ P при закрытии клапана 4 от срабатывания датчика 3. Кроме того, наружный комплекс включает привод вращения бурильной колонны - ротор либо верхний вращатель (на фиг. 1 показан только ротор 7) со следящим приводом 8, управляемым измерительно-усилительным элементом 9, который обеспечивает два режима работы: первый режим управления углом ϕкв верхнего конца бурильной колонны относительно стран света, задаваемого уставкой ϕквв, для этого используется датчик угла положения колонны, например, сельсинного типа; второй режим управления частотой ηкв вращения верхнего конца бурильной колонны, задаваемой уставкой ηквз, для этого используется датчик частоты привода вращения бурильной колонны. В случае применения следящего привода, включающего исполнительный двигатель постоянного тока, режим ηкв ≈ ηквз обеспечивается и при отсутствии датчика частоты.
В переводнике 2 (фиг. 2) размещены блок 10 питания, блок 11 управления и блокировки усилителя и клапана 4.
Датчик 3 гравитационной зенитной ориентации (фиг. 3) может быть выполнен на базе многообразных известных гравитационных датчиков [5], например аксельрометра с осью чувствительности, направленной в плоскости отклонителя в сторону направляющей его грани (см. ось O-Z на фиг. 2 и 3).
На фиг. 3 дана принципиальная схема гравитационного датчика, выполненного на базе простейшего осевого акселерометра прямого преобразования [5] с инерционной массой 12, закрепленной двумя пружинами 13, демпфера 14. Перемещение массы в направлении осей ОХ и ОY ограничено конструктивным путем.
Величина перемещения массы 12 преобразуется в электрический сигнал, например, с помощью потенциометра 15. При повороте оси чувствительности OZ относительно вертикальной оси на угол (зенитный) θ изменяются вертикальная составляющая силы тяжести массы 12, деформация пружин 13, происходит перемещение ползунка потенциометра 15 и изменяется величина выходного напряжения U9, подаваемого на электрический усилитель 16, от которого питается электромагнит 17, обеспечивающий перестановочное усилие Fх на входе гидравлического каскада усилителя 5, на выходе которого развивается перестановочное усилие Fn, необходимое для перекрытия глубинного клапана 4.
Работа системы обеспечивается автономным источником питания 10 (фиг. 3), в том числе гальваническими элементами, аккумуляторами, либо агрегатом, состоящим из автономной турбины, приводящей электрический генератор.
Для выключения наиболее энергоемкого электрического потребителя глубинной части может применяться выключатель 18 (фиг. 3).
В наружный комплекс системы входят блоки (не показаны), которые не имеют особенностей и выполнены на основе вычислительно-дисплейной техники:
блок вычисления для режима гравитационного зенитного кругового обзора (БУО);
блок вычисления для режима стабилизации и управления положением направляющей грани отклонителя (БУС);
блок отображения информации о углах ϕкв верхнего конца колонны относительно стран света и угла θот направляющей грани отклонителя от вертикали (БОИУ);
блок отображения информации режима бурения таких параметров, как момента М9 на золоте, скорости Vп подачи и т.д. (БОИР);
пульт управления режимом ориентирования устройства, направленного бурения и режима бурения (ПУ).
Блок БУО работает только в режиме гравитационного кругового обзора и предназначен для вычисления углов ϕвиз визирования и ϕзакзакручивания бурильной колонны. Угол ϕвиз представляет собой разность между углом θот поворота направляющей грани отклонителя от начальной координаты отсчета, например вертикали, и соответствующим углом ϕквсповорота выбранной грани верхней части бурильной колонны при отсутствии крутильных напряжений во всех элементах, составляющих бурильную колонну, он равен
ϕвиз = θот - ϕквс. (1)
Угол ϕвиз визирования зависит от числа труб, их свинчивания, закрепления в резьбовых соединениях, расчетным путем его определить нельзя.
Угол ϕзак закручивания бурильной колонны определяется разностью углов подобно тому, как для угла визирования, но при действии реактивного момента на статоре забойного двигателя, равен в статическом режиме моменту М9 на долоте
ϕзак = ϕквз - θотд. (2)
Угол ϕзак закручивания зависит от момента М9 на долоте, момента трения колонны о стенки скважины, крутильной жесткости отдельных участков бурильной колонны и поэтому определение ϕзак встречает большие трудности.
Блок БУС работает только в режиме стабилизации (управления) угла θот поворота направляющей грани отклонителя и предназначен для проведения вычислений в процессе дробления и определения уставки угла ϕквз поворота верхнего конца колонны, при котором стабилизируется (управляется) задаваемое значение θотз относительно вертикали. С этой целью на вход БУС подается значение момента М9 на долоте и значение угла ϕвиз визирования, определяемое блоком БОУ во время гравитационного зенитного кругового обзора, а также другие величины.
Блок БОИУ изображения информации служит для визуального наблюдения за изменением во времени t и пространстве, определяемой глубиной lс по стволу скважины, углов θот (t, lc) и ϕкв (t, lс).
Блок БОИР отображения информации служит для визуального наблюдения за параметрами режима бурения, в том числе оценки состояния долота.
Пульт ПУ служит для управления режимом гравитационного зенитного обзора, задавая значения ϕквз, и режимом стабилизации либо управления углом направляющей грани отклонителя θот, задавая значения уставок θот.3, а также для управления режимом бурения, задавая значения уставок его параметров.
Работа системы основана на следующих положениях.
Во-первых, система следящего привода вращения колонны во избежание отворачивания труб должна обеспечивать вращение колонны, неограниченное по часовой стрелке (+ϕкв) и ограниченное против часовой стрелки (-ϕкв ), на угол (-ϕкв) < Δϕквпред, задаваемый в зависимости от состава бурильной колонны. Это обеспечивает логическая схема измерительно-усилительного элемента 9.
Во-вторых, в системе используется датчик момента на верхнем конце бурильной колонны Мкв(t). В качестве датчика момента можно использовать как измерители усилий в силовой цепи ротора различного вида, так и привод вращения колонны, электрических величин (ток в цепи якоря, мощность с учетом потерь).
В-третьих, буровая установка оборудована устройством, обеспечивающим плавную подачу верхнего конца бурильной колонны в диапазоне скоростей Vп подачи, превышающей диапазон скоростей Vббурения, а желательно и подъем (скорость Vп<0). В качестве устройства подачи можно использовать выпускаемые отечественной промышленностью устройство, например, типа РПДЭ, которое может работать в режиме задаваемой скорости Vпз подачи, осевой нагрузки Gнз, момента Мдз на долоте, частоты nт вращения турбобура, давления Рвз на винтовом забойном двигателе.
В-четвертых, система включает переключатель режимов на две позиции: включение и выключение режима кругового обзора. Выключение режима обзора необходимо для уменьшения затрат энергии глубинного источника питания, уменьшения среднего давления бурового раствора, уменьшения износа глубинных гидравлических клапанов.
Переключатель режимов, управляемый с пульта управления, может иметь различные схемные и конструктивные решения. В качестве примера описывается переключатель с использованием кодированных гравитационных временных импульсов.
Глубинная часть переключателя режимов (фиг. 4) состоит из аксельрометра 19, подобного (допустимо и более грубого) гравитационному датчику, изображенному на фиг. 3. Входное напряжение Uдв с усилителя 20 подается на кодирующе-декодирующее глубинное устройство 21 с реле 22, включающим либо выключающим выключатель 18 (см. фиг. 3).
Наземная часть переключателя режимов состоит из кодирующего устройства, управляющего через элемент 9 углом поворота верхнего конца колонны. Так, например, для положения ВКЛЮЧЕНО можно послать команду на n1 полных оборотов колонны, после чего на выдержку времени t1 и посылку новым n1 полных оборотов колонны. Это приводит к срабатываниям аксельрометра 19, импульсы от которого по заданному коду через декодирующее устройство 21 (с реле времени) включают реле 22, включающему и блокирующему выключатель 18 (фиг. 3).
Например, для положения ВЫКЛЮЧЕНО можно использовать аналогичный код, но изменить значение t1 на t2, другое по величине (см. фиг. 4).
В-пятых, бурильная колонна рассматривается в упругом поведении без учета инерционных сил (из-за малых ускорений). При этих условиях зависимость между углом θот поворота отклоняющей грани отклонителя, отсчитываемого по часовой стрелке (в сторону вращения долота), и углов ϕкв поворота выбранной грани верхнего конца бурильной колонны относительно стран света (например, магнитного севера) имеет вид
θот = ϕкв + ϕвиз - ϕзак, (3) где ϕвиз - угол визирования, определяемый по (1), имеющий различные значения;
ϕзак - угол закручивания бурильной колонны.
Наличие различных случайных факторов режимов бурения, состояния скважины и др. не дают возможности для определения ни ϕвиз ни ϕзакрасчетным путем.
Система гравитационного зенитного кругового обзора для ориентации направленного бурения горизонтальных и сильнонаклоненных скважин работает следующим образом.
Устанавливается какой-либо регламентированный режим бурения, при котором скорость подачи Vп равна скорости бурения.
Переключатель режимов ставят в положение ВКЛЮЧЕНО для проведения операции обзора.
С пульта управления ориентацией задают, медленно увеличивая последовательно различные значения ϕкв через интервалы, равные 2 π (фиг. 5). Благодаря наличию следящего привода 8 и элемента 9 верхний конец буровой установки поворачивается по часовой стрелке, занимает последовательно контролируемые блоком БУС положения
ϕкво; ϕкв1 = ϕкво + 2 π;
ϕкв2 = ϕкв1 + 2 π, ..., (4)
ϕквn = ϕкв(n-1) + 2 π, где ϕкво - первое положение верхнего конца колонны, при котором выбранная грань колонны (ротора) совпадает, например, с магнитным севером. Указанные значения ϕкв0, ϕкв1 ... передаются (от датчика угла) на блок вычисления БУО и фиксируются посредством его памяти.
В ходе проведенной операции обзора через некоторые приращения угла Δϕквх поворота колонны поступают от датчика 6 давления на блок БУО сигналы фронта повышения давления (фиг. 5), сигнализирующие о совпадении положений θот1, θот2,..., θотn направляющей грани отклонителя 1 с вертикалью, каждому из которых соответствуют значения углов поворота верхнего конца бурильной колонны
ϕкв1х = ϕкв1 (θот1), ϕкв2х = ϕкв2 (θот2),...,
ϕквnx = ϕквn (θот.n) . (5)
При взаимодействии глубинного датчика 3 ориентации и наземного датчика 6 давления (фиг. 5) на вычислительный блок БУО поступают сигналы, показанные пунктирными линиями, и соответствующие последовательности
ϕкв1, ϕкв2, ϕкв3, ..., ϕквn (6)
ϕкв1x, ϕкв2х, ϕкв3х , ..., ϕквnx, при этом разности углов
Δϕк
Δϕкв(3-2) = ϕк
. . . . . . . . . . . . . . . . . . .
Δϕк
Получение сигналов  Р датчиком 6 давления, при которых положение θот1, θот2,..., θотn направляющей грани отклонителя совпадает с вертикалью, обеспечивается действием глубинной части системы (фиг. 2 и 3), работающей следующим образом.
Р датчиком 6 давления, при которых положение θот1, θот2,..., θотn направляющей грани отклонителя совпадает с вертикалью, обеспечивается действием глубинной части системы (фиг. 2 и 3), работающей следующим образом.
Инерционная масса 12 датчика 3 удерживается пружинами 13 и при повороте своих упоров перемещается по оси OZ, перемещая ползунок реостата потенциометра 15 и изменяя напряжение Uвх на входе в усилитель 16. Это происходит потому, что при повороте упоров пружин 13 изменяется направленная по оси OZ вертикальная составляющая силы их сопротивления
от Fcmax ( θот = 0)
до Fc = 0 при θот=  ; Fс=-Fсmax (θот= π).
; Fс=-Fсmax (θот= π).
Поэтому зависимость между напряжением U9 и углом положения отклонителя можно представить периодической кривой, близкой к косинусоиде.
Усилитель 16 включен так, что при появлении напряжения  U9включается электромагнит 17, развивая усилие, которым закрывается первый гидравлический каскад усилителя 5, перекрывающего клапан 4, что приводит к появлению фронта нарастания давления
U9включается электромагнит 17, развивая усилие, которым закрывается первый гидравлический каскад усилителя 5, перекрывающего клапан 4, что приводит к появлению фронта нарастания давления  Р, воспринимаемого датчиком 6 (фиг. 1). При проведении гравитационного зенитного кругового обзора необходимо координировать грань отклонителя (с углом θот) с гранью (отметкой) на верхнем конце бурильной колонны (с углом ϕквс) в той ситуации, в которой ведется бурение.
Р, воспринимаемого датчиком 6 (фиг. 1). При проведении гравитационного зенитного кругового обзора необходимо координировать грань отклонителя (с углом θот) с гранью (отметкой) на верхнем конце бурильной колонны (с углом ϕквс) в той ситуации, в которой ведется бурение.
Обзор путем проворачивания колонны желательно осуществлять шаговым методом с фиксацией после каждого шага на определенное время, достаточное для пробега фронта волны давления забоя к устью (1200-1300 м/с); величина шага в зоне приближения к появлению сигнала не более 2-3о.
Выполнение процедуры обзора предусматривает запоминание в вычислительном блоке БУО последовательности n-пар значений углов ϕквixи ϕквi поворота бурильной колонны, согласно выражению (6), где n - число циклов полного кругового обзора, осуществляемого приводом вращения колонны.
В процессе кругового обзора непрерывно наращивается угол ϕкв и угол θот, который при работе системы выражен через параметр ϕквх, т.к. ϕквх = ϕквi (θ отi) (см. выражение 5), сигнализирует совпадения положений θот1, θот2,..., θ отn направляющей грани отклонителя 1 с вертикалью. Одновременно наращивается значение углов визирования ϕвиз и закручивания ϕзак, флуктуирующие относительно средних значений сообразно ситуации бурения (данная колонна, действующий момент М9 на долоте, момент трения колонны о стенки скважины).
Для определения среднего положения угла поворота отклонителя суммируют значения всех величин углов, входящих в выражение (3) за n циклов, начиная с i = 1.
Так как значение θот задано через параметр ϕкв, то можно подставить ϕквх и в результате ϕ
ϕ ϕКВi+
ϕКВi+  ϕВИЗi-
ϕВИЗi-  ϕЗАКi. (8)
ϕЗАКi. (8)
Для определения среднего положения значения угла θот.ср поворота отклонителя, выраженного через параметр угла положения верхнего конца колонны, следует все члены выражения (8) разделить на n.
В результате получим
θОТ.СР=ϕ

 ϕКВi+
ϕКВi+  ϕВИЗi-
ϕВИЗi- 
 . (9)
. (9)
Так как в (9) ϕКВi=2Πn,
ϕКВi=2Πn,
то из (8) можно получить
ϕСН=  ϕВИЗi-
ϕВИЗi-  ϕЗАКi=
ϕЗАКi=  ϕ
ϕ
Это выражение определяет среднее значение угла скоса ϕсн положения направляющей грани отклонителя у забоя, недоступного непосредственному наблюдению относительно положения направляющей грани верхнего конца колонны (например, ротора относительно магнитного севера) и доступного для наблюдения на устье скважины.
Операции, соответствующие выражениям (9) и (10), выполняет вычислительный блок БУО обзора, выдавая на блок БОИУ отображения информации значения θот.ср и ϕкв. При неизменной в среднем ситуации бурения флуктуации возмущений носят случайный характер, поэтому чем больше число циклов n, тем точнее определение θот.ср. Число циклов n для уменьшения времени, затрачиваемого на обзор, можно ограничить, организовав "процедуру стационарности", т.е. определения такого числа циклов n, после которого значение θот.ср изменяется несущественно. При изменении средней ситуации в бурении указанную процедуру следует повторить.
Дальнейшее развитие данная система может получить за счет определения θот(t) в процессе механического долбления при изменении режимов бурения без частого проведения процедуры обзора, что важно для управления по закону θот = θот.з (Рс,t).
Данная система по сравнению с прототипом дает возможность производить определение и управление угла положения отклонителя в процессе механического долбления при бурении горизонтальных скважин, являющегося одним из основных направлений технического прогресса при современном бурении на нефть и газ.
Экономическую эффективность от внедрения заявленной системы предполагается оценить экономическим сравнением затрат на разработку и эксплуатацию заявляемой системы с имеющимися, предназначенными для проводки горизонтальных скважин, в том числе со сложными и дорогими телеметрическими системами либо с традиционными системами на каротажном кабеле, учитывая специфические условия для их применения при горизонтальном бурении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система геомагнитного азимутального кругового обзора для ориентации устройств направленного бурения | 1989 |
|
SU1668652A1 |
| Способ управления режимами бурения | 1989 |
|
SU1675546A1 |
| РОТОРНО-УПРАВЛЯЕМАЯ СИСТЕМА ДЛЯ БУРЕНИЯ СКВАЖИН С ЗАМКНУТЫМ ЦИКЛОМ ПРИНЯТИЯ РЕШЕНИЯ | 2021 |
|
RU2776547C1 |
| УПРАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ ПОЛОЖЕНИЕМ ОТКЛОНИТЕЛЯ В ХОДЕ БУРЕНИЯ | 2014 |
|
RU2611806C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ | 1999 |
|
RU2161701C2 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ЗАБОЙНЫМИ ПАРАМЕТРАМИ РЕЖИМА БУРЕНИЯ | 2006 |
|
RU2354824C2 |
| Устройство для контроля положения ствола горизонтальной скважины при бурении | 2020 |
|
RU2733536C1 |
| ИНТЕГРИРОВАННОЕ ОТОБРАЖЕНИЕ ПОЛОЖЕНИЯ ВЕДУЩЕГО ПЕРЕВОДНИКА И ОРИЕНТАЦИИ ТОРЦА ДОЛОТА | 2008 |
|
RU2439315C1 |
| СПОСОБ УПРАВЛЕНИЯ ОТКЛОНИТЕЛЕМ ПРИ БУРЕНИИ СКВАЖИНЫ КОМПОНОВКОЙ С ЗАБОЙНЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2144604C1 |
| АВТОМАТИЧЕСКАЯ ОЦЕНКА СКВАЖИННОГО ИССЛЕДОВАНИЯ | 2014 |
|
RU2613688C1 |
Назначение: для управления траекториями стволов нефтяных, газовых и разведочных скважин, бурящихся в горизонтальном направлении либо с большими наклонениями от вертикали. Сущность изобретения: управление отклонителем в процессе механического бурения осуществляется с помощью глубинного гравитационного чувствительного элемента, укрепленного на отклонителе, взаимодействующего с гравитационным полем земли. Гравитационный датчик действует на глубинный электрогидравлический клапан в процессе кругового обзора путем вращения бурильной колонны следящим приводом при плавной ее подаче. При этом на дневной поверхности измеряется изменение давления бурового раствора и момент на бурильной колонне. При этом датчик выполнен в виде размещенной в корпусе подпружиненной инерционной массы и жестко прикрепленного к ней одним плечом рычага. Другое плечо рычага механически соединено с ползунком потенциометра, который соединен через электроусилитель с электромагнитным приводом. 5 ил.
СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН, содержащая наземную часть, включающую установленный на входе в бурильную колонну датчик давления бурового раствора, следящий привод вращения буровой колонны, управляемый измерительно-усилительным элементом, и глубинную часть, включающую отклонитель, расположенный над отклонителем и жестко связанный с ним переводник, внутри которого последовательно установлены источник питания с блокировочным выключателем, глубинный датчик ориентации, электрогидравлический усилитель и глубинный клапан, отличающаяся тем, что, с целью повышения точности ориентации за счет гравитационного зенитного кругового обзора, глубинная часть снабжена переключателем режимов, выполненным в виде последовательно соединенных акселерометра, усилителя и реле, а глубинный датчик ориентации выполнен в виде размещенной в корпусе подпружиненной инерционной массы и жестко прикрепленного к ней одним плечом рычага, второе плечо которого механически соединено с ползунком потенциометра, соединенного через электроусилитель с электромагнитным приводом, выход которого является выходом датчика, при этом выход электроусилителя подключен к замыкающему контакту блокирующего выключателя источника питания, к управляющему входу которого подключен выход реле переключателя режимов.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Исаченко В.Х | |||
| Инклинометрия скважин | |||
| М.: Недра, 1987. | |||
