Изобретение касается телескопических устройств для перемещения штучных грузов и может быть эффективно использовано, в частности, в судостроении применительно к подводным техническим средствам.
Известно телескопическое подъемное устройство, содержащее неподвижный элемент, на котором смонтированы подвижная секция, подвижный винтовой шток, оснащенный грузовой кареткой, выполненной с возможностью вертикального перемещения посредством механизма подъема, выполненного в виде полого стакана, имеющего наружную и внутреннюю разнонаправленные винтовые нарезки, причем стакан связан с приводом посредством шарнирного сочлечения и соединен с неподвижным элементом с помощью гайки, с подвижной секцией с помощью подшипника, а внутренней резьбой - с винтовым штоком, шарнирно связанным с кареткой (см. авт.св. СССР 925835, B 66 B 9/18, публ. 11.11.81). При вращении выходного вала привода полый стакан перемещается относительно неподвижной гайки со скоростью V1 на расстояние S1, при этом винтовой шток перемещается со скоростью V2 на расстояние S2 относительно полого стакана, а относительно гайки - со скоростью V = V1 + V2 на расстояние S = S1 + S2.
Недостатком такого устройства является сложность конструкции механизма роспуска и значительный занимаемый устройством объем при небольшой (например, до 0,45 м) величине роспуска телескопической конструкции.
Известен механизм передачи движения от двух поршней к общему кривошипу (при V-образном), содержащий кривошип, шатуны, поршни, шарнирно соединенные в две параллельно-последовательные кинематические цепи, смонтированные на неподвижном элементе. За счет обратимого характера передачи движения при вращении кривошипа, например, в ходе раскрутки от стартера и взаимодействия звеньев и шарнирных связей поршни получают возможность возвратно-поступательного перемещения (см. С.Н. Кожевников, Я.И. Есипенко, Я.М. Раскин. Элементы механизмов., М.: Оборонгиз, 1956, с. 23, фиг. 33).
Недостатком этого механизма является сложность реализации такой схемы для обеспечения кодов поступательно движущихся звеньев в телескопической конструкции, например, при величине роспуска "телескопа" до 0,45 м.
Известен механизм для возвратно-поступательного движения двух ползунов с приводом от одного кривошипа, содержащий неподвижный элемент и перемещающийся по нему дополнительный ползун, который оснащен перемещающимся по нему основным ползуном, при этом механизм также оснащен ведущим диском с кривошипом, двумя шатунами, общим качающимся рычагом, шарнирно связанным с обоими шатунами, и поворотным звеном, шарнирно соединенным с неподвижной деталью (Ф. Д. Джонс, Х.Л. Хортон. Механизмы автоматического действия, М.: Машгиз, 1961, с. 464 - 465, рис. 363). При вращении ведущего диска (с кривошипом) за счет взаимодействия рычагов и шарнирных связей ползуны получают возможность одновременного возвратно-поступательного перемещения, что может быть использовано для перемещения штучных грузов.
Известное устройство выбрано в качестве наиболее близкого аналога заявляемому изобретению.
Недостатком известного устройства является наличие звеньев, усложняющих конструкцию и увеличивающих занимаемый механизмом объем.
Задачей изобретения является упрощение конструкции механизма выпуска и уменьшение массогабаритных характеристик устройства для перемещения штучных грузов.
Задача решена тем, что в известном устройстве для перемещения штучных грузов, содержащем привод перемещения, закрепленный на неподвижном элементе, промежуточную и выходную каретки, связанный с приводом рычажно-шарнирный механизм, кривошип которого шарнирно связан с входным концом шатуна выходной каретки, а выходные концы шатунов кареток шарнирно связаны с этими каретками, в соответствии с изобретением, кривошип выполнен в виде эксцентрика, а шатун промежуточной каретки входным концом шарнирно соединен с эксцентриком по его наружному диаметру, при этом расстояние между осью вращения эксцентрика и осью шарнира входного конца шатуна выходной каретки больше расстояния между осью вращения эксцентрика и осью, проходящей через его центр.
Кроме того, шатун выходной каретки выполнен в виде параллельных одноплечих рычагов, размещенных по торцам эксцентрика.
Технический результат изобретения состоит в упрощении механизма выпуска и уменьшении общего объема устройства.
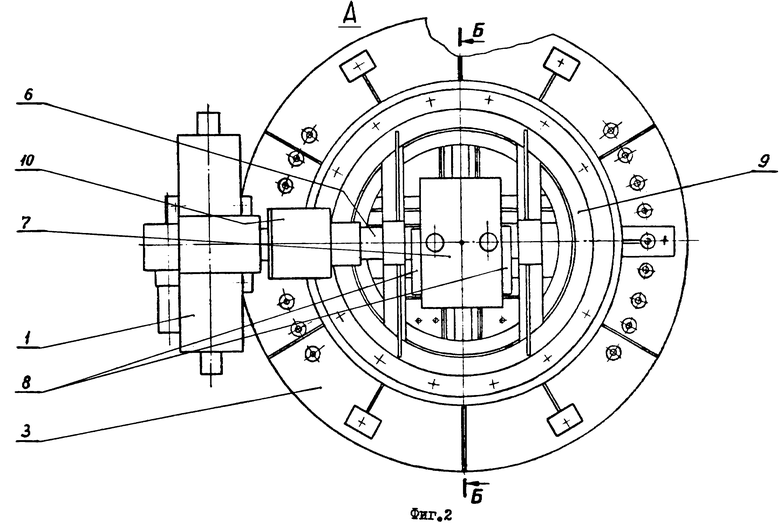
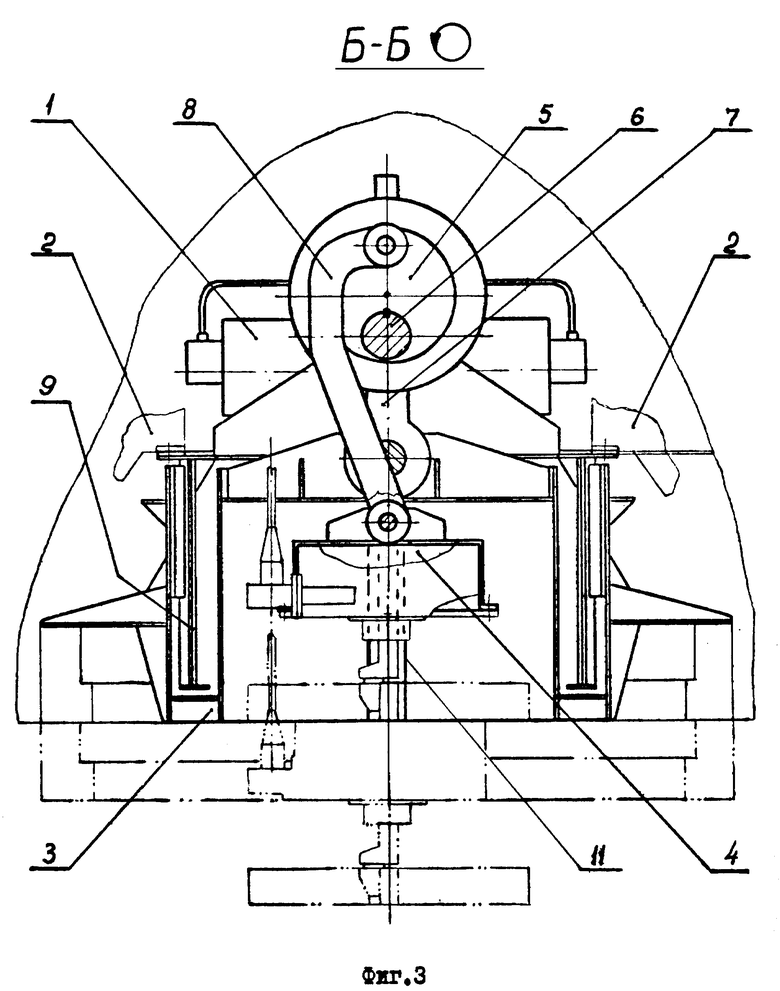
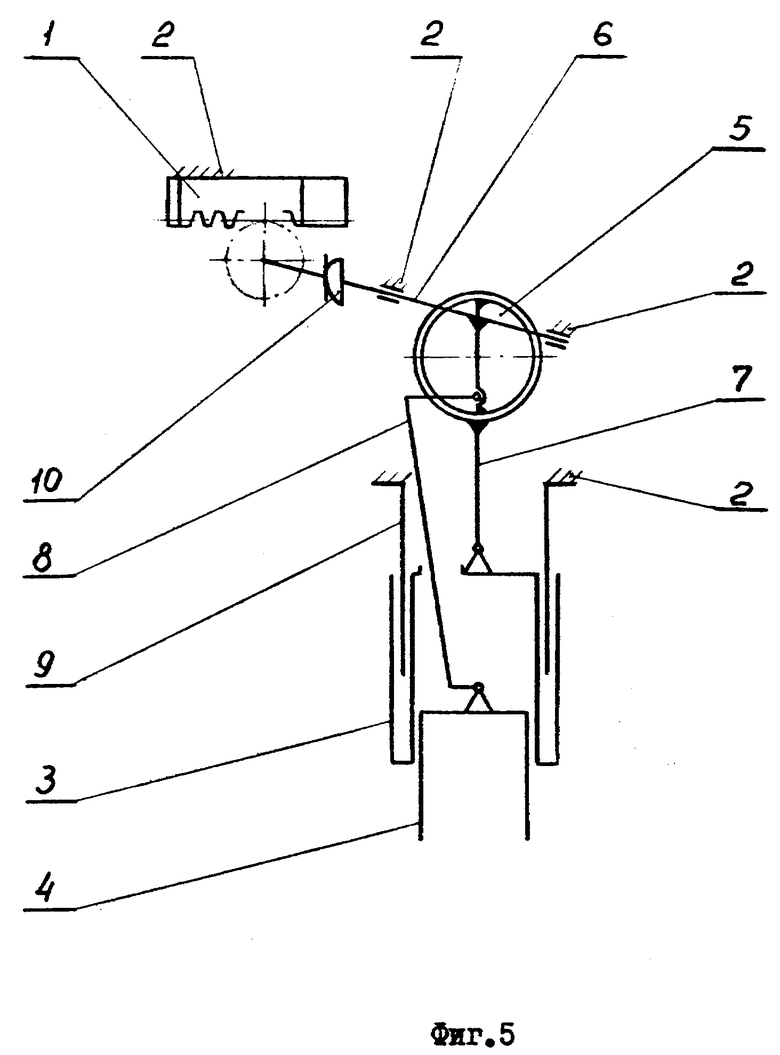
Сущность изобретения схематически иллюстрируется фиг. 1, на которой показан вид сбоку; на фиг. 2 - вид по стрелке А на фиг. 1); на фиг. 3 - поперечный разрез Б-Б на фиг. 2); на фиг. 4 показана кинематическая схема устройства в убранном положении; на фиг. 5 показана кинематическая схема устройства в выдвинутом положении.
Устройство содержит (фиг. 1) привод перемещения 1, в качестве которого может быть использован, например, гидродвигатель - неполноповоротная гидромашинка с углом разворота выходного вала 180o, неподвижный элемент 2, на котором смонтированы промежуточная каретка 3, оснащенная установленной внутри нее выходной кареткой 4 (см. фиг. 3), причем обе каретки 3 и 4 выполнены с возможностью одновременно перемещения от одного привода посредством рычажного механизма выпуска.
Рычажная часть механизма выпуска содержит кривошип (коромысло) - эксцентрик 5, жестко соединенный с валом 6 и шарнирно связанный с входными концами шатунов 7 и 8, которые шарнирно соединены своими выходными концами соответственно с каретками 3 и 4. При этом шарнирные соединения входных концов шатунов 7 и 8 выполнены соответственно по наружному диаметру и торцам эксцентрика 5, причем шатуны 8 выполнены в виде смонтированных по торцам эксцентрика 5 параллельных одноплечих рычагов.
Внутри описанной наружным диаметром эксцентрика 5 окружности размещены одновременно три оси - ось приводного вала 6 и две оси шарниров входных концов шатунов 7 и 8. Эти оси лежат в одной поворачивающейся плоскости и параллельны между собой в любом положении эксцентрика 5, что обеспечивает максимум хода каждой из кареток 3 и 4. Плечо на эксцентрике 5 определяется величиной межосевого расстояния между осью вала 6 и осью шарнира входного конца шатуна 8. Эксцентриситет эксцентрика 5 определяется величиной межосевого расстояния между осью вала 6 и осью шарнира входного конца шатуна 7. В силу конструктивных особенностей расстояние между осью вращения эксцентрика 5 - ось вала 6 и осью шарнира входного конца шатуна 8 выходной каретки 4 больше расстояния между осью вращения эксцентрика 5 и осью, проходящей через его центр, - осью шарнира входного конца шатуна 7 промежуточной каретки 3, превышает расстояние между осью вращения эксцентрика и осью, проходящей через его центр.
На неподвижном элементе 2 жестко закреплены направляющие в виде тубуса 9, и привод перемещения 1, который также шарнирной муфтой 10 подключен к валу 6, установленному в подшипниках неподвижного элемента 2. Каретка 3 оснащена направляющими 11 для перемещения по ним каретки 4.
Устройство работает следующим образом.
При повороте выходного вала привода перемещения 1 крутящий момент передается через муфту 10 валу 6, который, в свою очередь, поворачиваясь в подшипниках, передает крутящий момент жестко связанному с ним эксцентрику 5. Поворачиваясь, эксцентрик 5 через шарнирно присоединенные к нему шатуны 7 и 8 и за счет взаимодействия их шарнирных связей с эксцентриком 5 и каретками 3 и 4 сдвигает последние. Каретка 3 перемещается по направляющим - тубусу 9, жестко связанному с неподвижным элементом 2.
Каретка 4 перемещается по направляющим 11 каретки 3, причем каретки 3 и 4 перемещаются одновременно, с жесткой взаимосвязью они также имеют возможность фиксированного останова в любом промежуточном положении при фиксированном останове привода перемещения 1. При развороте эксцентрика 5 на угол рабочего поворота, например, на 180o, каретка 4 перемещается на полный ход телескопической колонны и вся система занимает крайнее положение.
Величина полного хода промежуточной каретки 3 вдвое больше величины расстояния между осью вращения эксцентрика 5 - осью вала 6 и осью, проходящей через центр эксцентрика 5, - осью шарнира входного конца шатуна 7. Величина полного хода выходной каретки 4 вдвое больше величины расстояния между осью вращения эксцентрика 5 - осью вала 6 и осью шарнира входного конца шатуна 8.
Для возврата системы в первоначальное положение привод перемещения 1 реверсируется и разворачивает двуплечий эксцентрик 5 в обратном направлении, при этом устройство, в том числе и каретка 4, приходят в первоначальное положение.
Устройство для перемещения штучных грузов упрощает конструкцию механизма выпуска и уменьшает занимаемый устройством объем, что повышает эффективность его использования на подводных технических средствах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕСКОПИЧЕСКИЙ ГИДРОЦИЛИНДР ДЛЯ БОЛЬШИХ ХОДОВ | 1999 |
|
RU2152898C1 |
| ТЕЛЕСКОПИЧЕСКИЙ ГИДРОЦИЛИНДР КОМБИНИРОВАННОГО ДЕЙСТВИЯ | 1999 |
|
RU2153462C1 |
| ТЕЛЕСКОПИЧЕСКИЙ ГИДРОЦИЛИНДР ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1999 |
|
RU2153464C1 |
| ПОРШНЕВОЙ СТУПЕНЧАТЫЙ ГИДРОПРИВОД КОМБИНИРОВАННОГО ДЕЙСТВИЯ | 1999 |
|
RU2164627C2 |
| СТУПЕНЧАТЫЙ ГИДРОПРИВОД ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1999 |
|
RU2152899C1 |
| СТУПЕНЧАТЫЙ ГИДРОПРИВОД КОМБИНИРОВАННОГО ДЕЙСТВИЯ | 1999 |
|
RU2152900C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ-ЗАКРЫВАНИЯ ЛЮКА | 2001 |
|
RU2201373C2 |
| ГИДРОЦИЛИНДР С ДВУСТОРОННИМ ШТОКОМ | 1999 |
|
RU2153463C1 |
| СИСТЕМА МОРСКИХ ТЕХНИЧЕСКИХ СРЕДСТВ, ВЗАИМОДЕЙСТВУЮЩИХ В ОТКРЫТОМ МОРЕ | 1996 |
|
RU2084372C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ И ОТДЕЛЕНИЯ ВСПЛЫВАЮЩЕГО БУЯ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2001 |
|
RU2214340C2 |

Изобретение относится к подъемно-транспортному машиностроению. Устройство для перемещения штучных грузов содержит привод перемещения, закрепленный на неподвижном элементе, промежуточную и выходную каретки, связанный с приводом рычажно-шарнирный механизм, кривошип которого шарнирно связан с входным концом шатуна выходной каретки, а выходные концы шатунов кареток шарнирно связаны с этими каретками. Кривошип выполнен в виде эксцентрика, а шатун промежуточной каретки входным концом шарнирно соединен с эксцентриком по его наружному диаметру, при этом расстояние между осью вращения эксцентрика и осью шарнира входного конца шатуна выходной каретки больше расстояния между осью вращения эксцентрика и осью, проходящей через его центр. Шатун выходной каретки выполнен в виде параллельных одноплечих рычагов, размещенных по торцам эксцентрика. Изобретение позволяет упростить конструкцию, уменьшить массу и габариты устройства. 1 з.п. ф-лы, 5 ил.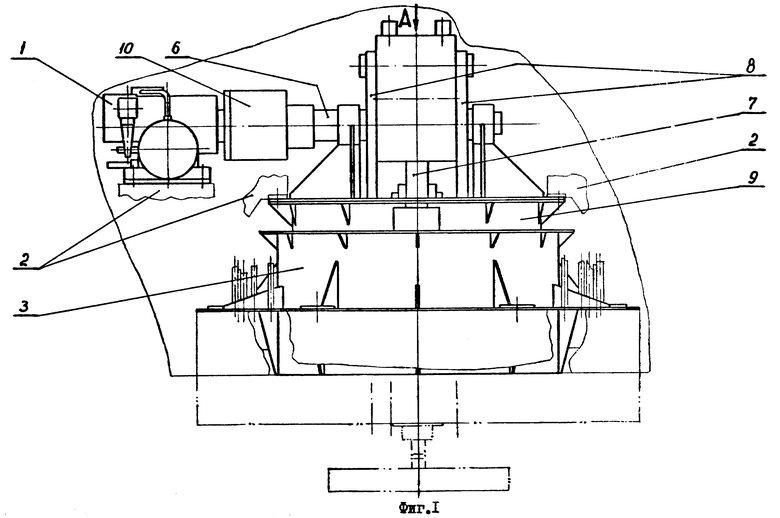
| ДЖОНС Ф.Д., ХОРТОН Х.Л | |||
| Механизмы автоматического действия | |||
| - М.: Машгиз, 1961, с.464-465, рис.363 | |||
| US 5749262 A, 12.05.1998 | |||
| Способ строительства нежесткого дорожного покрытия | 1978 |
|
SU687159A1 |
| Эксцентриковый кривошипно-ползунный механизм | 1983 |
|
SU1110969A1 |

