Изобретение относится к схемам автоматической регулировки усиления, в частности к новому способу и устройству для обеспечения автоматической регулировки усиления в цифровом радиоприемнике.
В аналоговых радиоприемниках, в частности, используемых в узкополосных сотовых системах связи с частичной модуляцией (ЧМ) для выделения информации, закодированной в фазе проходящего сигнала, используют демодуляторы ЧМ-сигналов. Известные демодуляторы ЧМ-сигналов обычно содержат аналоговый частотный дискриминатор, которому предшествует аналоговый ограничитель, служащий для ограничения мощности входного сигнала на некотором постоянном уровне. Таким образом поддерживается максимальное отношение сигнал-шум на входе частотного дискриминатора во всем динамическом диапазоне входного ЧМ-сигнала. Однако такая технология аналоговой обработки сигнала обычно включает добавочную фильтрацию сигнала и часто реализуется с использованием большого числа дискретных элементов. Кроме того, было показано, что лучшие результаты могут быть достигнуты при использовании не аналоговой, а линейной цифровой демодуляции сигнала. К сожалению, известные способы демодуляции частот не годятся для цифровых радиоприемников, поскольку ограничение принимаемого сигнала привело бы к исключению выделяемой из него информации.
Цифровой радиоприемник для приема информационного сигнала с цифровой модуляцией, как правило, содержит усилитель с регулируемым коэффициентом усиления, в котором коэффициент усиления регулируется посредством управляющего сигнала. Процесс регулирования коэффициента усиления принимаемого сигнала с использованием управляющего сигнала называют автоматической регулировкой усиления (АРУ). Обычно в цифровых радиоприемниках процесс АРУ включает в себя измерение мощности выходного сигнала усилителя с регулируемым коэффициентом усиления. Это измеренное значение сравнивается со значением, представляющим требуемую мощность сигнала, и вырабатывается управляющий сигнал для усилителя с регулируемым коэффициентом усиления. Затем значение ошибки используют для регулировки коэффициента усиления усилителя, чтобы обеспечить совпадение силы сигнала с требуемой мощностью сигнала. Для осуществления цифровой демодуляции с оптимальным отношением сигнал-шум АРУ используют для поддержания величин модулирующих сигналов близкими к полному динамическому диапазону аналогово-цифровых преобразователей (АЦП) модулирующих сигналов. Однако для этого требуется обеспечение автоматической регулировки усиления во всем динамическом диапазоне мощности принимаемого сигнала.
В условиях сотовой системы связи цифровой радиоприемник может принимать сигнал, характеризующий быстрыми изменениями мощности в широких пределах. В цифровых радиоприемниках, используемых в мобильном сотовом телефоне системы связи с многостанционным доступом с кодовым разделением каналов (МДКР), необходимо регулировать мощность демодулированного сигнала для обеспечения надлежащей обработки сигнала. Однако, чтобы обеспечить совместимость цифровых радиоприемников с МДКР и ЧМ-режимами в так называемых двухрежимных МДКР ЧМ-приемниках, необходимо осуществлять регулировку мощности как широкополосных МДКР-сигналов, так и узкополосных ЧМ-сигналов. Процесс регулировки усложняется из-за различия динамических диапазонов, соответствующих мощности принимаемых МДКР- и ЧМ-сигналов. При этом величина принимаемых ЧМ-сигналов может колебаться в динамическом диапазоне более 100 дБ, тогда как для систем МДКР обычно характерен более ограниченный динамический диапазон примерно 80 дБ.
Обеспечение отдельной схемы АРУ для каждого режима усложняет используемые аппаратные средства и повышает стоимость таких приемников. Поэтому желательно создать схему АРУ, способную работать как с узкополосными ЧМ-сигналами в широком динамическом диапазоне, так и с широкополосными МДКР-сигналами в более ограниченном динамическом диапазоне.
Также желательно создать цифровую схему АРУ для недорогих радиоприемников, в которых используются АЦП с ограниченным динамическим диапазоном. И в этом случае, из-за того что ЧМ-сигналы в сотовых системах могут изменяться в пределах более 100 дБ, а относительно недорогие 8-разрядные АЦП ограничены динамическим диапазоном примерно 48 дБ, для экономичной реализации АРУ необходимо регулировать усиление в каскадах приемника, предшествующих АЦП, чтобы не превышать динамический диапазон АЦП. Альтернативой может быть использование дорогостоящих АЦП с более широким динамическим диапазоном, что повышает стоимость радиоприемника, или увеличение диапазона АРУ аналоговой части радиоустройства, что трудоемко и неэкономично.
Поэтому задачей изобретения является создание новой и усовершенствованной схемы АРУ, имеющей перечисленные выше существенные признаки, а также обладающей другими преимуществами по сравнению с известными технологиями АРУ.
Предлагаются способ и устройство для автоматической регулировки усиления, предназначенные для регулировки мощности принимаемого радиосигнала в широком динамическом диапазоне. В предпочтительном варианте устройство автоматической регулировки усиления может быть настроено на обеспечение желаемого отклика регулировки на разные характеристики замирания принимаемого радиосигнала. Устройство, выполненное согласно изобретению, может обеспечить необходимую регулировку усиления в схемах, использующих широкополосный сигнал, например МДКР-сигнал, содержащий цифровую информацию, или узкополосный сигнал, такой как ЧМ-сигнал, содержащий аналоговую информацию.
Согласно изобретению предложено устройство автоматической регулировки усиления (АРУ) для двухрежимного радиоприемника. Устройство АРУ содержит усилитель с регулируемым коэффициентом усиления, имеющий вход для приема входного сигнала, управляющий вход для приема сигнала регулировки усиления и выход для выдачи выходного сигнала. Устройство АРУ также содержит средство для выработки сигнала принимаемой мощности на основании мощности выходного сигнала. Интегратор с насыщением сравнивает сигнал принимаемой мощности с опорным сигналом и вырабатывает сигнал регулировки усиления посредством интегрирования или без использования интегрирования в зависимости от значений опорного сигнала, сигнала принимаемой мощности и сигналов регулировки усиления.
В дальнейшем изобретение поясняется описанием конкретных вариантов его реализации со ссылками на прилагаемые чертежи, на которых представлено следующее:
фиг. 1 - структурная электрическая схема возможного варианта осуществления устройства автоматической регулировки усиления (АРУ) согласно изобретению,
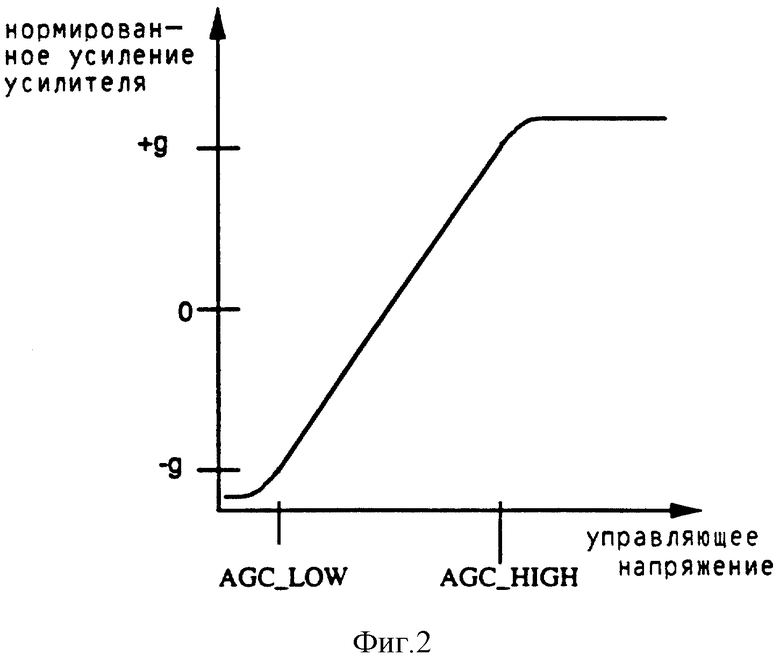
фиг. 2 - график коэффициента усиления усилителя с АРУ в функции напряжения регулировки усиления,
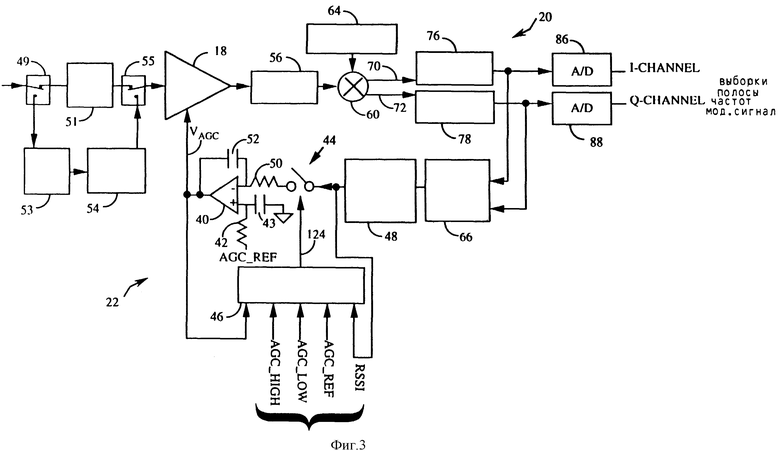
фиг. 3 - возможный вариант осуществления устройства автоматической регулировки усиления, соответствующего изобретению и содержащего замкнутый контур управления, реализованный в аналоговой форме,
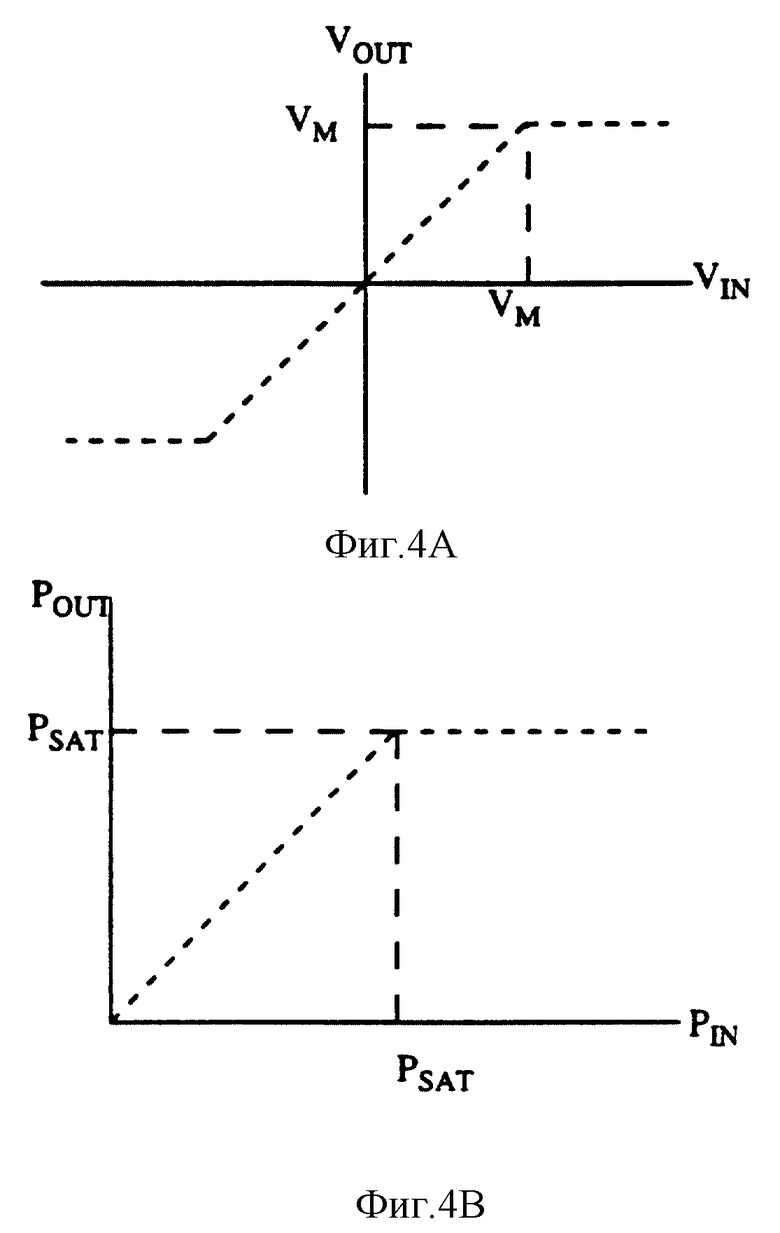
фиг. 4A и 4B - передаточные характеристики напряжения и мощности, соответственно, относящиеся к возможной реализации ограничителя сигнала, включенного в устройство регулировки усиления, соответствующее изобретению,
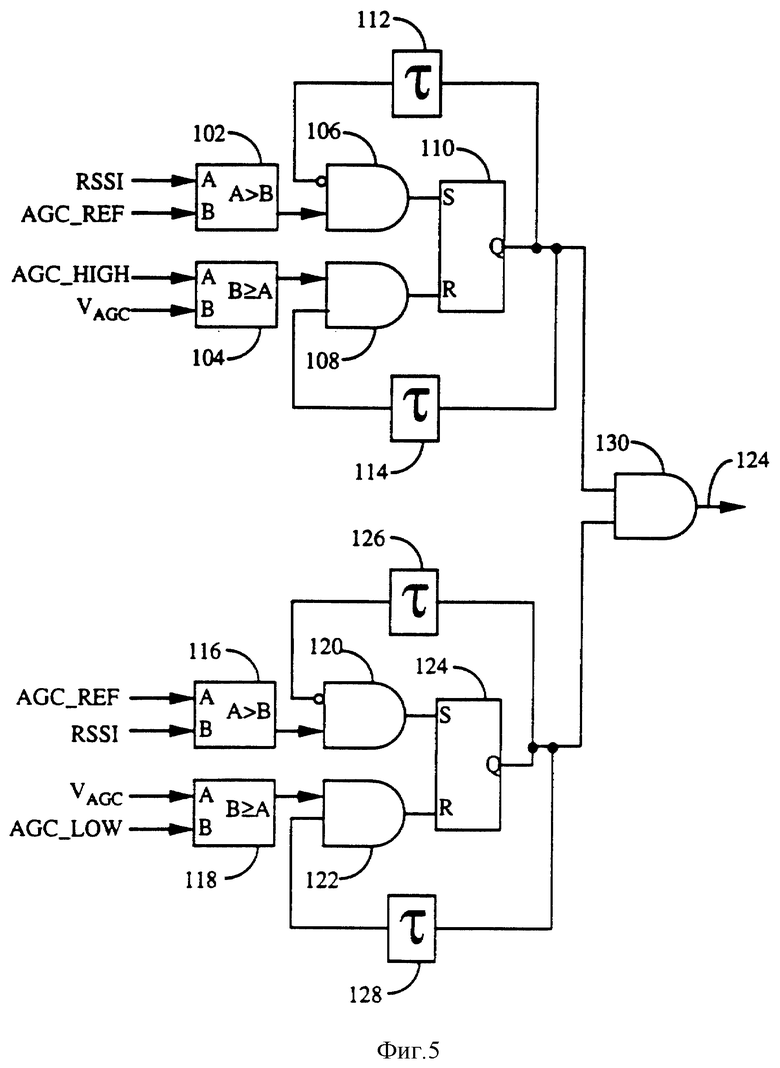
фиг. 5 - возможный вариант осуществления решающей логики, используемой для управления работой переключателя управления интегрированием,
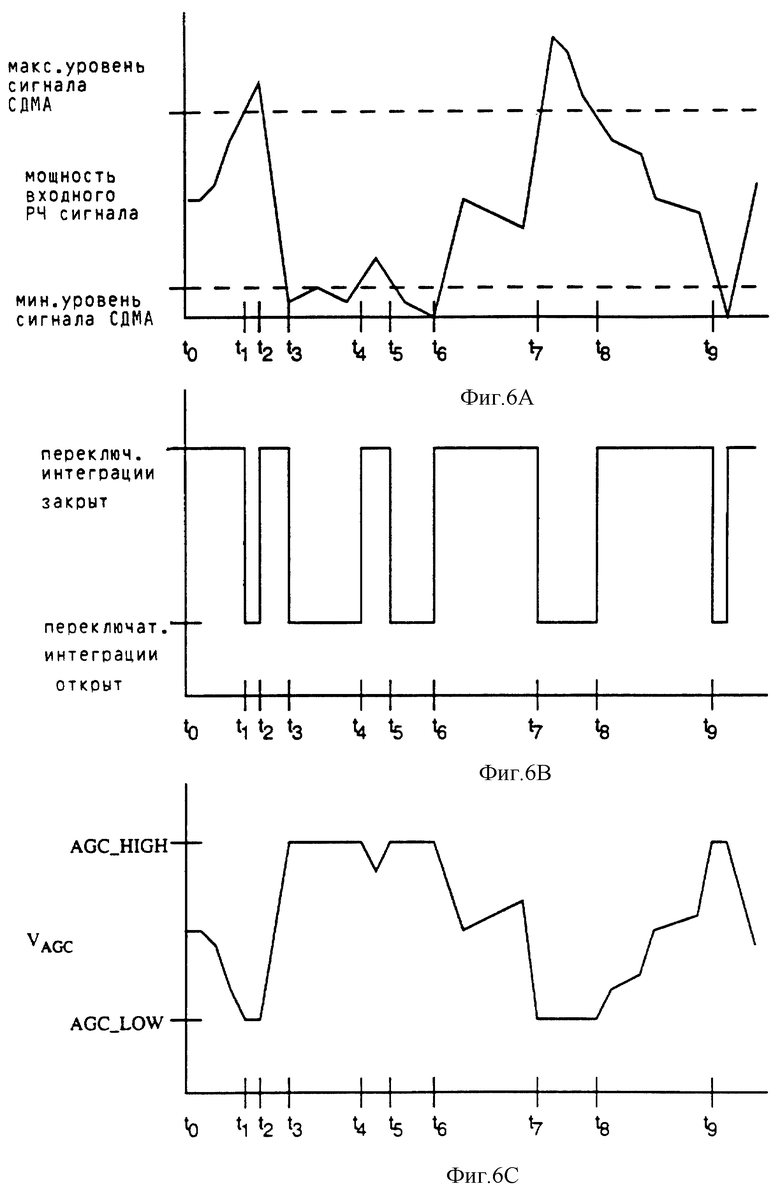
фиг. 6A-6C - временные диаграммы, иллюстрирующие работу предлагаемого устройства АРУ,
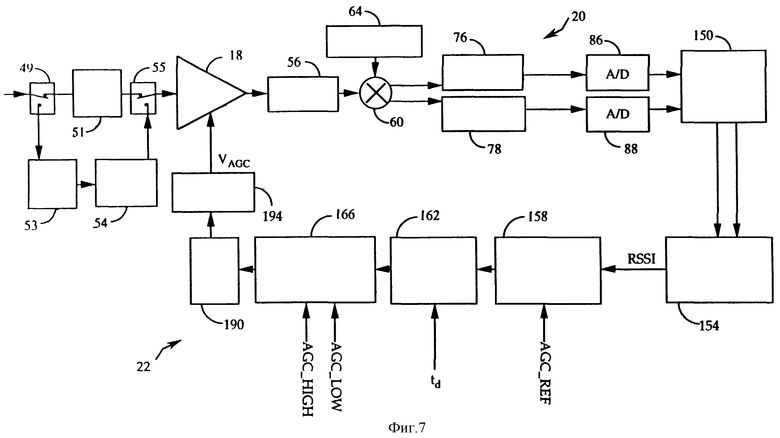
фиг. 7 - предпочтительный вариант устройства АРУ, включающий цифровую реализацию автоматической системы управления,
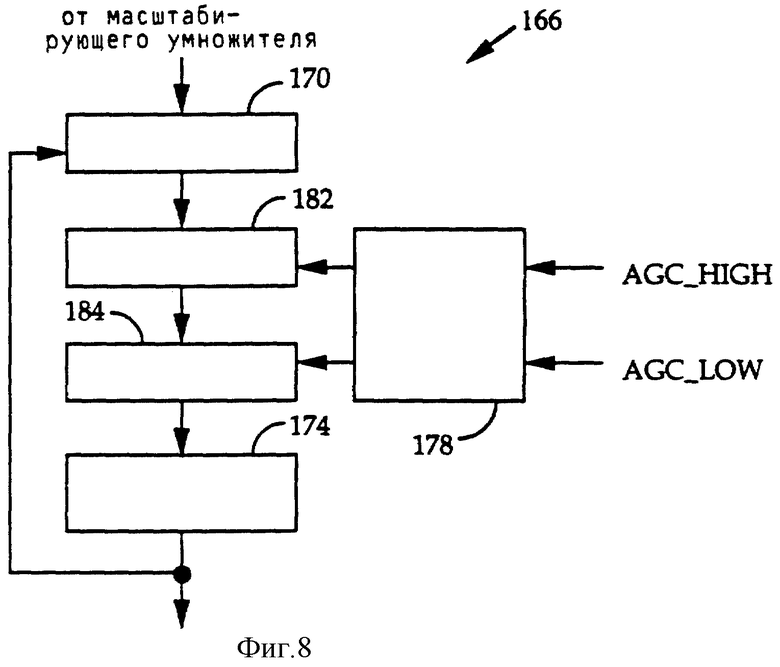
фиг. 8 - возможный вариант цифрового накопителя с насыщением включенного в интегратор по фиг. 7.
В цифровом радиоприемнике, в частности в радиоприемнике, используемом в портативном средстве сотовой связи с МДКР, необходимо поддерживать мощность обрабатываемого сигнала на постоянном уровне. В условиях сотовой связи приемник может принимать сигнал, характеризуемый быстрыми изменениями мощности в широком диапазоне. Для корректной обработки цифровых данных, содержащихся в принимаемом сигнале, в радиоприемнике необходимо регулировать мощность сигнала. В цифровом радиоприемнике, работающем в двух режимах, например цифровом радиоприемнике, выполненном с возможностью обработки как МДКР-сигналов, так и стандартных ЧМ-сигналов, динамический диапазон принимаемого сигнала изменяется как функция выбранного рабочего режима. Поэтому предлагается устройство автоматической регулировки усиления для цифрового радиоприемника, которое способно в каждом своем рабочем режиме компенсировать изменения мощности принимаемого сигнала в любых из этих условий.
На фиг. 1 представлена структурная электрическая схема возможного варианта осуществления предложенного устройства автоматической регулировки усиления. На фиг. 1 устройство автоматической регулировки усиления реализовано в приемопередатчике портативного сотового радиотелефона 10, работающего в системе МДКР. Радиотелефон 10 может быть двухрежимным, т.е. совместимым с МДКР- и ЧМ-режимами. Предлагаемое устройство автоматической регулировки усиления способно обеспечивать регулировку мощности как широкополосных МДКР-сигналов, так и узкополосных ЧМ-сигналов. Совместимость такой схемы с широкополосными и узкополосными сигналами обеспечивает снижение затрат, а также сбережение компонентов и питающей мощности в данном радиоприемнике.
Радиотелефон 10 содержит антенну 12 для приема радиосигналов, включающих МДКР- и ЧМ-сигналы, передаваемые с базовой станции. Антенна 12 передает принимаемые сигналы на антенный переключатель 14, откуда они поступают в приемную часть радиотелефона 10. Антенный переключатель 14 также принимает МДКР- или ЧМ-сигналы от передающей части телефона 10 для передачи на антенну 12, а с нее - на базовую станцию.
Принимаемые радиосигналы поступают с выхода антенного переключателя 14 на понижающий преобразователь 16, где они преобразуются в диапазоне более низкой частоты и формируются в виде соответствующих сигналов промежуточной частоты (ПЧ). Сигналы ПЧ с понижающего преобразователя 16 поступают в усилитель промежуточной частоты (УПЧ) 18 с автоматической регулировкой усиления. Уровень усиления сигналов ПЧ определяется сигналом АРУ (VAGC), который также подается на усилитель 18. Усилитель 18 выполнен с возможностью обеспечения линейной регулировки усиления в верхнем динамическом диапазоне, например выше 80 дБ, посредством VAGC. Усилитель 18 может быть реализован в виде усилителя с линейной автоматической регулировкой коэффициента усиления, раскрытого в патенте США 5099204.
В упомянутом выше патенте США 5099204 используется компенсационная схема для получения заданного динамического диапазона линейной регулировки. В конкретных примерах осуществления такую регулировку может обеспечивать схема усиления без использования компенсационной схемы. К таким реализациям относятся, например, случаи, когда несколько каскадов усиления включены последовательно. Наличие высоковольтного источника питания также может исключить необходимость в компенсационной схеме.
Сигналы ПЧ с регулируемым усилением поступают с выхода усилителя 18 на второй понижающий преобразователь частоты 20, где они преобразуются в более низкий диапазон частоты и передаются в виде соответствующих квадратурных составляющих IBB и QBB модулирующего сигнала. В варианте, изображенном на фиг. 1, модулирующие сигналы в режиме МДКР являются выборками I и Q кодированных цифровых данных, которые передаются для последующей фазовой демодуляции и корреляции. В двухрежимном радиоприемнике понижающий преобразователь 20 преобразует с понижением частоты также и ЧМ-сигналы, обеспечивая синфазные и квадратурные составляющие ЧМ-сигналов, которые затем подвергаются фазовой/частотной демодуляции с получением речевого сигнала на выходе.
Детектор 25 измеряет уровень сигналов на выходе понижающего преобразователя 20 и вырабатывает соответствующий сигнал индикации уровня принимаемого сигнала (RSSI). RSSI-сигнал вместе с опорным сигналом АРУ (AGC_REF), обеспечиваемым контроллером (не показан), поступает на схему интегратора с насыщением 22. Сигнал AGC_ REF соответствует заданному уровню сигнала для модулирующих сигналов. Контроллер также передает на интегратор 22 опорные сигналы нижнего и верхнего предела АРУ (AGC_LOW) и AGC_HIGH соответственно). Сигналы AGC_LOW и AGC_HIGH соответствуют пределам величины сигнала регулировки усиления (VAGC), передаваемого на управляющий вход усилителя 18 интегратором с насыщением 22.
На фиг. 2 коэффициент усиления усилителя 18 представлен как функция напряжения регулировки усиления. Здесь показано, что группа коэффициента усиления усилителя 18 имеет нелинейный наклон до относительно постоянных значений напряжений регулировки, которые выше AGC_HIGH или ниже AGC_LOW. В общем, желательно ограничить значение VAGC в рамках линейного диапазона между AGC_ HIGH и AGC_LOW, чтобы соответствующая постоянная времени контура управления оставалась в допустимых пределах. Отклонение постоянной времени контура управления от допустимых пределов может привести к существенным ошибкам в его работе. Согласно изобретению рабочий диапазон усилителя 18 ограничен областью линейного усиления посредством интегратора с насыщением 22, чтобы исключить ухудшение работы, вызванное такими ошибками контура управления.
Как будет описано ниже, интегратор с насыщением 22 выполнен с возможностью интегрирования разности между RSSI и AGC_REF-сигналами, когда VAGC находится между AGC_LOW и AGC_HIGH. Когда интегратор с насыщением 22 не выполняет операцию интегрирования, сигнал регулировки усиления VAGC поддерживается постоянным на уровне AGC_HIGH или AGC_LOW, улучшая тем самым работу контура управления, как было описано выше. В предпочтительном варианте изобретения решающие логические схемы в интеграторе с насыщением 22 анализируют значение RSSI и AGC_REF совместно с величиной VAGC относительно AGC_HIGH и AGC_LOW.
Согласно фиг. 1 на интегратор с насыщением 22 поступает RSSI-сигнал от детектора 25 вместе с AGC_REF-сигналом от контроллера. При этом для обеспечения точной регулировки мощности необходимо, чтобы разность между сигналами RSSI и AGC_REF была минимизирована. Для обеспечения этой функции в цепи АРУ используется интегратор с насыщением 22, который сводит эту разность к нулю. Например, если усиление сигнала слишком высокое, RSSI-сигнал будет также высоким по сравнению с AGC_ REF-сигналом. Выходной сигнал VAGC интегратора будет продолжать уменьшать коэффициент усиления усилителя 18 до тех пор, пока эти сигналы не будут иметь эквивалентную величину.
При этом подразумевается, что измерение RSSI можно выполнять в разных точках при обработке принимаемого сигнала. Хотя на фиг.1 показано, что измерение производится после понижающего преобразования частоты понижающим преобразователем 20, это измерение можно выполнять в любом месте цепи обработки сигнала, следующей за УПЧ 18. Измерение RSSI предпочтительно производить после завершения фильтрации сигнала, чтобы минимизировать мощность измеряемых паразитных помех. При использовании аналоговых способов регулировки мощности для широкополосных и узкополосных сигналов, одну и ту же схему регулировки мощности можно использовать для обоих режимов работы.
В передающей части 30 портативного радиотелефона, изображенного на фиг. 1, мощность передачи также регулируется. Сигнал VAGC опять используется для обеспечения мгновенной регулировки мощности передачи в режиме МДКР. Сигнал VAGC поступает в передающую часть 30 вместе с различными другими управляющими сигналами от контроллера (не показан).
На фиг. 3 изображен возможный вариант предложенного устройства автоматической регулировки усиления, который содержит интегратор с насыщением 22, содержащий средство для формирования сигнала регулировки усиления посредством селективного интегрирования сигнала ошибки на основе значений сигнала ошибки и сигнала регулировки усиления. Более конкретно, интегратор с насыщением включает в себя интегратор 40 на операционном усилителе с цепью обратной связи, выполненной для обеспечения функции интегратора. В частности, интегратор 40 принимает сигнал AGC_REF через резистор 42 на свой неинвертирующий вход, с которым также соединен конденсатор 43. Когда переключатель 44 замыкается в ответ на управляющую информацию, поступающую от решающих логических схем 46 интегратора, RSSI-сигнал на выходе RSSI-детектора 48 принимается интегратором 40 через резистор 50, и интегратор 40 осуществляет интегрирование принимаемого сигнала. Когда переключатель 44 удерживается в открытом положении в ответ на управляющую информацию от решающих логических схем 46 интегратора, конденсатор 52 служит для поддержания относительно постоянного выходного сигнала (VAGC) интегратора 40 на уровне AGC_ HIGH или AGC_LOW. Выходной сигнал VAGC интегратора 40 образует, таким образом, сигнал регулировки усиления. Это предотвращает насыщение усилителя 18, если величина входного сигнала ПЧ отклоняется от установленного динамического диапазона. В течение этого времени переключатель 44 предотвращает интегрирование сигнала с выхода RSSI-детектора 48. Таким образом, интегратор 40 вместе с его решающими логическими схемами 46 для управления переключателем 44 реализует селективное интегрирование принимаемого сигнала.
Также, на фиг. 3 изображен вариант переключающего устройства с использованием радиочастотных переключателей 49 и 55. Радиочастотные переключатели 49 и 55 соединяют полосовой фильтр ПЧ 51 системы МДКР с УПЧ 18 во время работы в режиме МДКР, как показано положением переключателей на фиг. 3. В ЧМ-режиме положение радиочастотных переключателей 49 и 55 изменятся, чтобы подключить полосовой фильтр ПЧ 53 ЧМ-сигнала и ограничителя 54 к УПЧ 18. Полосовой ЧМ фильтр ПЧ 53 для режектирования внеканальных помех определяет ширину полосы ЧМ-сигналов, поступающих через ограничитель 54 на усилитель 18. Например, в ЧМ-режиме фильтр ПЧ 53 ЧМ-сигнала выполнен с полосой пропускания, равной приблизительно одному сотовому каналу (например, 30 кГц), и с полосой задерживания, существенно вне пределов средней ПЧ (например, +/- 60 кГц). В режиме работы МДКР фильтр ПЧ 51 выполнен с возможностью режекции внеканальных помех и определяет ширину полосы МДКР сигналов, поступающих на усилитель 18. Например, в режиме МДКР полосовой фильтр ПЧ 51 может обеспечивать полосу пропускания, соразмерную с частотой следования элементов сигнала в модулирующем тракте приемника (например, 1,26 МГц), и обеспечивать заданную полосу задерживания (например, 1,8 МГц). В альтернативном варианте ограничитель 54 может находиться на общем тракте перед УПЧ 18.
Ограничитель 54 ослабляет мощные радиосигналы, в основном принимаемые при работе в ЧМ-режиме. ЧМ-сигналы могут превышать максимальную мощность сигналов, имеющихся во время работы в МДКР-режиме. В предпочтительном варианте ограничитель 54 ограничивает мощность на входе усилителя 18 в пределах динамического диапазона, например 80 дБ, характерного для МДКР режима. Ограничитель 54 позволяет обеспечить диапазон управления цепи АРУ по фиг.3 на основании ожидаемого динамического диапазона МДКР, исключая тем самым необходимость обеспечения отдельно калиброванных цепей АРУ для ЧМ и МДКР-режимов.
На фиг. 4A и 4B проиллюстрированы соответственно передаточные характеристики по напряжению и мощности, связанные с возможным вариантом выполнения ограничителя 54. При этом ограничитель 54 не ослабляет сигналы, величина напряжения которых меньше установленного максимального напряжения Vm. Мощность в насыщении можно количественно представить как PSAT = Vm2/2RL, где RL означает входной нагрузочный импеданс усилителя 18. При входной мощности выше PSAT мощность выходного сигнала, обеспечиваемая ограничителем 54, поддерживается постоянной на уровне примерно PSAT посредством ограничения пикового напряжения сигнала до напряжения Vm. Значение PSAT выбирается исходя из максимального ожидаемого уровня мощности на входе в МДКР-режиме. Соответственно для синусоидальных входных сигналов ПЧ высокой мощности (Pin > PSAT) выходной сигнал, формируемый ограничителем 54, ограничивается до фиксированной амплитуды, но имеет основную частоту, идентичную входной ПЧ, и фазовая информация, присущая ему изначально, сохраняется за счет фильтрации нижних частот фильтром нижних частот (ФНЧ).
ФНЧ 56, включенный в понижающий преобразователь 20, выполнен с частотой среза, превышающей частоту сигнала ПЧ на выходе усилителя 18 в любом из режимов (МДКР или ЧМ). Как уже отмечалось выше, ФНЧ 56 предназначен для ослабления гармоник сигнала ПЧ на выходе усилителя 18 перед понижающим преобразованием в модулирующие синфазную (I) и квадратурную (Q) составляющие. Мощные сигналы, клиппированные ограничителем 54, создают нежелательные гармоники. ФНЧ 56 диапазона ПЧ удаляет эти нежелательные гармоники, так что они не преобразуются в полосу частот модулирующих сигналов вместе с информацией полезного сигнала ПЧ. В возможном варианте реализации тип, порядок и край полосы пропускания фильтра 56 выбирают таким образом, чтобы ослабить искажения полосы частот модулирующих сигналов, вызванные гармониками ПЧ, характерными для усиленного сигнала ПЧ, формируемого усилителем 18.
Отфильтрованный сигнал ПЧ поступает на первый вход смесителя 60, тогда как на другой вход смесителя 60 поступает опорный сигнал гетеродина 64. Смеситель 60 смещает отфильтрованный сигнал ПЧ с опорным сигналом для формирования I- и Q-компонентов полосы частот модулирующих сигналов соответственно на выходных линиях 70 и 72. Смеситель 60 выполнен с возможностью отображать частоту, сдвинутую от средней ПЧ на заданную величину, например от 3 до 300 Гц, в направлении частоты полосы частот модулирующих сигналов по постоянному току. Такая величина смещения постоянного тока позволяет цепи АРУ по фиг. 3 отличать немодулированный ЧМ-сигнал (т.е. непрерывный сигнал) от ошибки смещения постоянного тока на входе. В частности, смеситель 60 будет предпочтительно срабатывать, вырабатывая выходную частоту примерно 100 Гц, в ответ на входной непрерывный сигнал на ПЧ, соответствующий середине полосы. Таким образом, ошибки смещения постоянного тока на выходе, искажающие измерения мощности RSSI, исключаются с помощью узкополосного режекторного фильтра 66 постоянной составляющей без ослабления информации непрерывного сигнала.
Согласно фиг. 3 выходы 70 и 72 соединены соответственно со схемами I и Q-фильтров нижних частот 76 и 78 полосы частот модулирующих сигналов. Каждый из фильтров 76 и 78 предпочтительно реализован с возможностью обеспечения функций передачи нижних частот с частотой среза 13 кГц и 630 кГц соответственно в ЧМ- и МДКР-режимах. В возможном варианте реализации каждый фильтр 76 и 78 состоит из двух фильтров, один из которых используется при работе в МДКР-режиме, а другой в ЧМ-режиме. Отдельные фильтры, входящие в схемы фильтров 76 и 78, включены соответственно в тракты модулирующих I и Q сигналов в зависимости от выбранного режима работы. В предпочтительном варианте контроллер системы содержит средство для переключения фильтров в соответствии с выбранным режимом работы.
После фильтрации в схемах фильтров 76 и 78 полосы частот модулирующих сигналов и в узкополосном режекторном фильтре 66 постоянной составляющей полученные модулирующие I и Q сигналы поступают на RSSI-детектор 48. RSSI-детектор 48 вырабатывает выходной RSSI-сигнал, характеризующий измеренную мощность сигнала (в дБ). Разность между RSSI-сигналом на выходе RSSI-детектора 48 и AGC_REF интегрируется в интеграторе с насыщением 22 для получения напряжения регулировки VAGC.
На фиг. 3 I и Q-сигналы с выхода схем фильтров 76 и 78 полосы частот модулирующих сигналов также поступают соответственно на I и Q аналогово-цифровые преобразователи (АЦП) 86 и 88. АЦП 86 и 88 квантуют I и Q-сигналы полосы модуляции для цифровой демодуляции в выбранном рабочем режиме, т.е. МДКР или ЧМ. В предпочтительном варианте динамический диапазон АЦП 86 и 88 выбирается достаточным для сигналов, превышающих управления устройства АРУ УПЧ 18. Как уже отмечалось выше со ссылками на фиг. 2 и 3, решающие логические схемы 46 в интеграторе с насыщением 22 ограничивают напряжение регулировки VAGC в пределах AGC_LOW < VAGC < AGC_HIGH. Это препятствует насыщению усилителя 18 в нелинейной рабочей области.
АЦП 86 и 88 выполнены с возможностью квантования входных сигналов без их искажения независимо от того, насыщен или нет интегратор 40. В предпочтительном варианте каждый из АЦП 86 и 88 обеспечивает 6-8 разрядов динамического диапазона. Этот динамический диапазон достаточен, чтобы не вызывать ухудшения отношения сигнал-шум на входах АЦП 86 и 88 по сравнению с отношением сигнал-шум квантованного цифрового сигнала на выходе АЦП 86 и 88 при любом уровне входного радиосигнала. Например, если VAGC достигает значения AGC_LOW и входной сигнал продолжает расти, ограничитель 54 ограничивает амплитуду ПЧ-сигнала. Таким образом, уровень сигнала на входе АЦП 86 и 88 может превышать уровень, определенный AGC_REF, только на некоторую фиксированную величину. Следовательно, АЦП 86 и 88 будут продолжать точное квантование модулирующих сигналов и на этом более высоком уровне.
Аналогичным образом динамический диапазон АЦП 86 и 88 достаточен, чтобы не вызывать ухудшения отношения сигнал-шум при более низких уровнях входного радиосигнала. Например, когда VAGC достигает величины AGC_HIGH и размыкается переключатель 44, если входной радиосигнал продолжает снижаться, уровень модулирующего сигнала на входе АЦП 86 и 88 падает ниже уровня, определенного AGC_ REF. Этот сниженный уровень сигнала на входе АЦП 86 и 88 не использует полный динамический диапазон устройства, т.е. некоторые разряды выходного сигнала АЦП 86 и 88 не используются. Сокращенное использование полного динамического диапазона АЦП 86 и 88 ухудшает их шум-фактор по сравнению с использованием полного динамического диапазона. Однако отношение сигнал-шум на входе АЦП 86 и 88 также снижается, так как уровень радиосигнала приближается к минимальному уровню теплового шума телефона. Благодаря этому уменьшенному отношению сигнал-шум на входе АЦП 86 и 88, сниженный шум-фактор АЦП 86 и 88 не влияет на отношение сигнал-шум на их выходе. Следовательно, отношение сигнал-шум на выходе АЦП 86 и 88 не подвергается существенному воздействию из-за уменьшения использования полного динамического диапазона АЦП 86 и 88. Таким образом, предлагаемое устройство АРУ позволяет использовать систему АРУ с ограниченным диапазоном для демодуляции сигналов, занимающих значительно больший динамический диапазон, чем диапазон управления УПЧ 18.
На фиг. 5 представлен возможный вариант реализации решающих логических схем 46, предназначенных для управления положением переключателя 44. Как показано на фиг. 5, AGC_HIGH и VAGC-сигналы поступают в логический компаратор 104. Если VAGC выше уровня AGC_HIGH, выход компаратора 104 становится уровнем лог. 1. Выходной сигнал компаратора 104 обрабатывается по схеме "И" с выходным сигналом триггера 110, который имеет уровень логической "1" вследствие замкнутого состояния переключателя 44. Выходной сигнал триггера 110 задерживается элементом задержки 114, чтобы исключить избыточное случайное переключение положений переключателя 44. Элемент "И" 108 и элемент задержки 114 выполнены с возможностью предотвращения размыкания переключателя 44 до тех пор, пока не истечет установленное время после его замыкания. Выходной сигнал элемента "И" 108 переходит с низкого уровня на высокий, устанавливая тем самым выходной сигнал триггера 110 на уровень логического "0", и формируя уровень логического "0" на выходе элемента "И" 130, и отпирая переключатель 44. При размножении переключателя 44 RSSI-сигнал и AGC_REF-сигнал больше не поддерживаются контуром управления в эквивалентном состоянии. Если AGC_ HIGH превышен и контур разомкнут, RSSI-сигнал указывает на наличии сигнала ниже AGC_REF и на выходе логического компаратора 102 устанавливается уровнем логического "0". Если RSSI-сигнал превышает уровень AGC_ REF, выход компаратора 102 переходит на высокий уровень и выход элемента "И" 106 также переходит на высокий уровень, устанавливая тем самым выход триггера 110 на уровень логической "1" и закрывая переключатель 44. Элемент задержки 112 и элемент "И" 106 функционируют аналогично элементу задержки 114 и элементу "И" 108 и предотвращают замыкание переключателя 44 до тех пор, пока он не будет открыт на установленный интервал времени.
Аналогичная последовательность логических операций выполняется, когда уровень входного радиосигнала превышает диапазон АРУ. Когда VAGC падает ниже уровня AGC_LOW, на выходе компаратора 118 устанавливается уровнем логической "1". Выходной сигнал компаратора 118 обрабатывается по схеме "И" с выходным сигналом триггера 124, который находится на уровне логической "1", когда переключатель 44 закрыт. Выходной сигнал элемента "И" 122 переходит с низкого уровня на высокий уровень, устанавливая тем самым на выходе триггера 124 уровень логической "0". В результате этого уровень логического "0" формируется на выходе элемента "И" 130, что приводит к размыканию переключателя 44. Когда переключатель 44 открыт, контур управления больше не поддерживает RSSI-сигнал равным AGC_REF-сигналу. После такого размыкания контура RSSI-сигнал будет выше AGC_REF и на выходе логического компаратора 116 установится уровнем логического "0". Если RSSI-сигнал становится ниже AGC_REF, выходы компаратора 116 и элемента И переходят на высокий уровень. Этот переход устанавливает выход триггера 124 на уровень логической "1" и закрывает переключатель 44. Элементы задержки 126 и 128 и элементы "И" 120 и 122 функционируют аналогично элементу задержки 114 и элементу "И" 108 и служат для предотвращения быстрого переключения переключателя 44 между открытым и закрытыми положениями.
Логический выходной сигнал элемента "И" 130 можно рассматривать как сигнал разрешения интегрирования и он прикладывается к линии управления 124 переключателя, связанной с переключателем 44. В предпочтительном варианте переключатель 44 закрывается в ответ на приложение уровня логической "1" к линии управления 124 и открывается, когда к ней прикладывается уровень логического "0". Таким образом, решающие логические схемы 46 интегратора определяют, когда разность между RSSI и AGC_REF сигналами интегрируется интегратором 40 на операционном усилителе. При этом решающие логические схемы 46 интегратора и интегратор 40 взаимодействуют для формирования VAGC.
Работа устройства АРУ по фиг. 3 может быть описана более подробно со ссылками на временные диаграммы на фиг. 6A-6C. В частности, фиг.6A и 6B соответственно иллюстрируют изменения мощности возможного радиосигнала во времени и соответствующее состояние (открытое или закрытое) переключателя 44 в интеграторе с насыщением 22. На фиг. 6C показано соответствующее значение напряжения регулировки усиления (VAGC), выработанное интегратором 40 в ответ на входной радиосигнал на фиг. 6A.
Как показано на фиг. 6A и 6C, на первом интервале интегрирования (t0 < t < t1), мощность входного радиосигнала ограничивается диапазоном управления цепи АРУ и соответственно AGC_LOW < VAGC < AGC_HIGH (фиг. 6C). В момент t = t1 решающие логические схемы 46 интегратора 46 определяют, что VAGC достиг AGC_ LOW и поэтому открывают переключатель 44. Переключатель 44 остается открытым в течение интервала времени t1 < t < t2, во время которого предотвращается интегрирование интегратором 40 разности между RSSI И AGC_REF. В это время входной сигнал АЦП 86 и 88 ограничивается ограничителем 54. В момент t = t2 мощность входного радиосигнала опять становится ниже верхней границы диапазона управления контура управления, что приводит к закрытию переключателя 44 решающими логическими схемами 46 интегратора и превышению VAGC уровня AGC_ LOW. Затем переключатель 44 остается закрытым на втором интервале интегрирования (t2 < t < t3) до тех пор, пока напряжение регулировки VAGC достигнет уровня AGC_HIGH, когда переключатель 44 вновь откроется решающими логическими схемами 46 интегратора. В это время вход АЦП 86 и 88 изменяется в ответ на изменения уровня входного радиосигнала. Аналогичным образом переключатель 44 закрывается решающими логическими схемами 46 интегратора в моменты времени t4, t6 и t8 для инициирования третьего, четвертого и пятого интервалов интегрирования.
На фиг. 7 представлен предпочтительный вариант предложенной системы АРУ, содержащей интегратор с насыщением 22, реализованный в цифровой форме. В варианте на фиг.7 вместо аналогового узкополосного режекторного фильтра 66 постоянного тока используется цифровой фильтр верхних частот 150 для удаления смещения постоянного тока, характерного для I и Q выборок модулирующих сигналов, формируемых АЦП 86 и 88. Частота среза фильтра 150 выбирается существенно ниже сдвига частоты, вносимого в смесителе 60. В альтернативном варианте смещение постоянного тока можно удалять следующим образом:
(i) посредством раздельного определения средних значений I и Q-выборок модулирующих сигналов и
(ii) посредством вычитания полученной составляющей постоянного тока из каждой I и Q-составляющей перед последующей обработкой.
Цифровой RSSI-детектор 154 в типовом случае содержит таблицу преобразования, содержащую значения логарифмов мощности, индексированных как функция величины I и Q выборок модулирующих сигналов. Цифровой RSSI-детектор 154 аппроксимирует логарифм мощности, т. е. 10 LOG (12+02), путем определения значения LOG-(MAX{ ABS (I), ABS(Q)} ) и значения корректирующего члена. В операции MAX{ ABS (I), ABS (Q)} вырабатывается выходное значение, эквивалентное величине максимальной составляющей данной пары выборок I/Q. В частном выполнении это выходное значение служит индексом для таблицы преобразования логарифма мощности. Затем выходной сигнал, полученный из таблицы преобразования, складывается с корректирующим членом, приблизительно равным разности между LOG(12+Q2) и LOG(MAX{ABS(I), ABS(Q)}).
Оценка принимаемой мощности, т.е. RSSI-сигнал, сформированный RSSI-детектором 154, поступает на цифровой вычитатель 158 вместе с AGC_REF-сигналом. Полученный сигнал ошибки затем масштабируют в соответствии с желаемой постоянной времени td контура управления с помощью цифрового масштабирующего умножителя 162. Постоянная времени td контура управления выбирается в соответствии с ожидаемыми характеристиками замирания входного радиосигнала. В основном будут выбираться относительно короткие постоянные времени контура (для ее более быстрого отклика), чтобы обеспечить отслеживание сигналов, характеризуемых скачкообразным замиранием.
В предпочтительном варианте масштабирующий умножитель 162 может быть запрограммирован на умножение сигнала ошибки с вычитателя 158 на первую постоянную времени контура управления в ответ на затухающие RSSI-сигналы и умножение на вторую постоянную времени системы, если значение RSSI-сигнала возрастает. Это обеспечивает дополнительную гибкость при расчете отклика цепи АРУ на основании характеристик замирания конкретной рабочей среды и сводит к минимуму перерегулирование контура управления.
На фиг. 7 масштабированный сигнал ошибки, сформированный масштабирующим умножителем 162, поступает на накопитель с насыщением 166. Накопитель с насыщением 166 предназначен для накапливания значений масштабированного сигнала ошибки в суммарный сигнал ошибки до тех пор, пока сигнал ошибки не достигнет уровня AGC_ HIGH или AGC_LOW. Затем значение суммарного сигнала ошибки удерживается на уровне AGC_HIGH или AGC_LOW до тех пор, пока не будет получен масштабированный сигнал ошибки, который после объединения с существующим суммарным сигналом ошибки даст суммарный сигнал ошибки в интервале, ограниченном AGC_HIGH и AGC_LOW. Суммарный сигнал ошибки образует, таким образом, цифровой управляющий сигнал.
На фиг. 8 представлен возможный вариант реализации накопителя с насыщением 166, являющегося средством для накопления цифровых выборок в цифровой управляющий сигнал. Масштабированный сигнал ошибки поступает на первый вход цифрового сумматора 170. Этот масштабированный сигнал ошибки складывается в цифровом сумматоре 170 с суммарным сигналом ошибки, сформированным с помощью накопителя с насыщением 166, причем суммарный сигнал ошибки хранится в первом регистре 174. Значения AGC_HIGH и AGC_LOW, обеспечиваемые контроллером системы (не показан), хранятся во втором регистре 178. Ограничители 182 и 184 соответственно минимального и максимального сигнала, подключенные ко второму регистру 178, ограничивают значение цифрового сигнала, поступающего в первый регистр 174, в пределах диапазона между AGC_HIGH и AGC_LOW.
Цифровая реализация фильтра 150 верхних частот, RSSI-детектора 154 и интегратора с насыщением 22, изображенных на фиг. 7 и 8, обеспечивает ряд преимуществ по сравнению с соответствующими аналоговыми реализациями. Например, используемые цифровые элементы не чувствительны к влияниям температурного дрейфа и позволяют регулировать постоянную времени интегрирования в соответствии с ожидаемыми условиями замирания сигнала, что ускоряет захват сигнала контуром управления. Кроме того, фильтр и интегратор, реализованные в цифровой форме, занимают значительно меньший объем, чем соответствующая компоновка отдельных резистивных и емкостных элементов.
Также предполагается, что использование цифрового RSSI-детектора и цифрового интегратора с насыщением обеспечит повышение точности. В частности, в течение интервала времени, во время которого требуется поддерживать значение VAGC на уровне AGC_ HIGH или AGC_LOW, разряд емкостей и подобные явления, характерные для аналоговых элементов, будут вызывать спад значения VAGC от желаемого уровня в течение некоторого времени. В варианте цифровой реализации интегратора с насыщением, изображенным на фиг. 7 и 8, отсутствует спад сигнала, присущий аналоговым интеграторам.
Согласно фиг. 7 суммарный сигнал ошибки, хранящийся в регистре 174 накопителя с насыщением 166, поступает в цифроаналоговый преобразователь (ЦАП) 190. В предпочтительном варианте разрешающая способность ЦАП 190 обеспечит шаг АРУ аналогового выходного сигнала величиной менее 1 дБ. Альтернативно, в ответ на суммарный сигнал ошибки выдается импульсная последовательность логических уровней 0, 1 с широтно-импульсной модуляцией или с модуляцией по плотности импульсов. Последняя описана в заявке США 08/011618 на "Преобразователь многоразрядных цифровых сигналов в одноразрядные". Среднее значение выходной импульсной последовательности соответствует полезному выходному аналоговому напряжению.
Аналоговый выходной сигнал, формируемый ЦАП 190, пропускается через ФНЧ 194 перед передачей его на управляющий вход УПЧ 18. ФНЧ 194 предназначен для ослабления любого паразитного выходного сигнала, образованного ЦАП 190.
Приведенное выше описание предпочтительных вариантов позволит любому специалисту в данной области осуществить или использовать изобретение. Для специалистов также будут очевидны различные модификации, которые можно внести в эти варианты, а раскрытые общие принципы изобретения можно применять в других вариантах без приложения изобретательской деятельности. Поэтому изобретение не ограничивается описанными вариантами осуществления и имеет широкий объем, соответствующий раскрытым здесь принципам и новым существенным признакам.
Сущность изобретения: устройство АРУ содержит усилитель с регулируемым коэффициентом усиления, имеющий вход для приема входного сигнала, управляющий вход для приема сигнала регулировки усиления и выход для выдачи выходного сигнала. Устройство АРУ также содержит измерительную схему для выработки сигнала принимаемой мощности на основании мощности выходного сигнала. Интегратор с насыщением сравнивает сигнал принимаемой мощности с опорным сигналом и вырабатывает сигнал регулировки усиления в ответ на результат сравнения. Интегратор с насыщением содержит решающую схему для разрешения интегрирования на основании значений сигнала принимаемой мощности, опорного сигнала и сигнала регулировки усиления. В предпочтительном варианте использование входного ограничителя в совокупности с аналого-цифровым преобразователем обеспечивает расширение динамического диапазона входного сигнала. 9 с. и 30 з.п.ф-лы, 8 ил.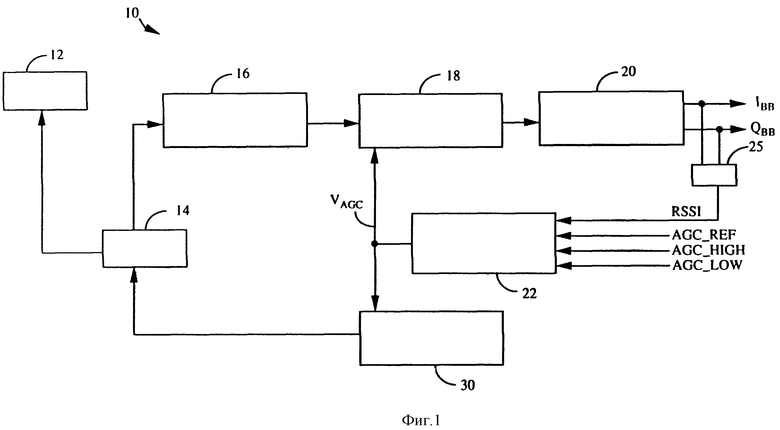
| Устройство дискретной регулировки величины входного сигнала | 1989 |
|
SU1626332A1 |
| US 5107225 A, 21.04.1992 | |||
| US 5187809 A, 16.02.1993 | |||
| US 4301445, 17.11.1981 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
