Область техники
Настоящее изобретение относится в основном к ВЧ-приемникам с квадратурной демодуляцией. В частности, настоящее изобретение относится к новому способу и устройству для обеспечения автоматической регулировки усиления, подавления внедиапазонных сигналов и исключения смещений постоянной составляющей в цифровом приемнике.
Характеристика известного уровня техники
В аналоговых приемниках, таких как используемые в ЧМ-системах сотовой радиосвязи, применяют ЧМ-демодуляторы для выделения информации, закодированной в фазе падающего сигнала. Существующие ЧМ-демодуляторы часто включают аналоговый частотный дискриминатор, перед которым стоит аналоговый ограничитель для поддержания мощности входного сигнала на постоянном уровне. В этом случае на входе частотного дискриминатора поддерживается максимальное отношение "сигнал - шум" во всем динамическом диапазоне входного ЧМ-сигнала. Однако такой способ обработки аналоговых сигналов, как правило, обуславливает фильтрацию расширенных сигналов и зачастую реализуется с использованием большого числа элементов. Кроме того, показано, что можно добиться повышенных эксплуатационных характеристик за счет использования линейной цифровой демодуляции сигналов, а не аналоговой демодуляции. К сожалению, обычные способы демодуляции зачастую неприменимы к цифровым приемникам, поскольку ограничение принятого сигнала может привести к искажению получаемой на его основе информации.
Цифровой приемник для приема подвергнутого цифровой модуляции информационного сигнала, как правило, включает усилитель с регулируемым коэффициентом усиления, который регулируют сигналом управления. Процесс регулировки коэффициента усиления принятого сигнала с помощью сигнала управления называют автоматической регулировкой усиления (АРУ). Обычно в цифровых приемниках процесс АРУ обуславливает измерение мощности выходного сигнала усилителя с переменным коэффициентом усиления. Измеренную величину сравнивают с величиной, отображающей желаемую мощность сигнала, и в результате этого генерируется сигнал управления для усилителя с регулируемым коэффициентом усиления. Затем величину ошибки используют для регулировки коэффициента усиления усилителя таким образом, чтобы уровень сигнала соответствовал желаемой мощности сигнала. Чтобы осуществить цифровую демодуляцию с оптимальным отношением "сигнал - шум", используют автоматическую регулировку усиления для поддержания амплитуды модулирующих сигналов, близкой ко всей ширине динамического диапазона полосы частот модулирующих сигналов аналого-цифровых преобразователей. Однако это требует, как правило, чтобы обеспечивалась автоматическая регулировка усиления во всем динамическом диапазоне мощности принятого сигнала.
В условиях сотовой системы цифровой приемник может принимать сигнал, мощность которого претерпевает быстрые изменения в широком диапазоне значений. В таких цифровых приемниках, как те, что используются в сотовом телефоне подвижного объекта с многодистанционным доступом с кодовым разделением каналов (МДКРК) и многодистанционным доступом с временным разделением каналов (МДВРК), необходимо регулировать мощность демодулированного сигнала для надлежащей обработки сигналов. Тем не менее, как в МДКРК или МДВРК совместимых приемниках, так и в обычных ЧМ-совместимых приемниках, т.е. двухрежимных цифровых/ЧМ приемниках, необходимо обеспечить регулировку мощности как широкополосных МДКРК сигналов (или МДВРК-сигналов), так и узкополосных ЧМ-сигналов. Процесс регулировки осложняется наличием различных динамических диапазонов, связанных с мощностью принятых ЧМ и МДКРК сигналов. То есть, амплитуда принятых ЧМ-сигналов может изменяться в динамическом диапазоне свыше 100 дБ, тогда как применение МДКРК систем обычно приводит к более ограниченному динамическому диапазону, например, приблизительно 80 дБ. Наличие схем АРУ для каждого режима повышает сложность аппаратного обеспечения и стоимость таких приемников. Поэтому желательно разработать схемы АРУ, способные работать как с узкополосными ЧМ-сигналами широкого динамического диапазона, так и с широкополосными МДКРК-сигналами более ограниченного динамического диапазона.
Желательно также разработать цифровую АРУ в недорогих приемниках, в которых используются аналого-цифровые преобразователи (АЦП) с ограниченным динамическим диапазоном. И снова, поскольку ЧМ-сигналы в сотовых системах могут изменяться в диапазоне свыше 100 дБ, а относительно недорогие восьмиразрядные АЦП имеют динамический диапазон, ограниченный 48 дБ, внедрение экономичной АРУ обеспечило бы возможность регулировки коэффициента усиления части приемника, предшествующей АЦП, чтобы регулировать динамический диапазон сигнала в АЦП. Альтернативой является использование дорогих АЦП, имеющих больший динамический диапазон, с увеличением за счет этого стоимости приемника или с увеличением диапазона АРУ аналоговой части радиоприемника, что очень трудно и дорого.
Поэтому в основу настоящего изобретения поставлена задача разработки новой и усовершенствованной схемы АРУ, которая включает желательные признаки, упомянутые выше, и которая, как указано ниже, также имеет другие преимущества по отношению к известным способам АРУ.
В стандартных сотовых ЧМ-телефонах функцию АРУ выполняет схема, называемая ограничителем. Когда используют ограничитель, подавление внедиапазонного сигнала можно осуществить только с помощью фильтров промежуточной частоты (ПЧ). Хотя требуемую способность подавления сигналов можно обеспечить путем использования керамических фильтров ПЧ, они, как правило, относительно велики по габаритам и дороги. Меньшие и менее дорогие фильтры ПЧ, как правило, не удается выполнить так, чтобы они обладали желаемыми характеристиками подавления сигналов, и поэтому их, как правило, не используют в ЧМ-приемниках сотовых телефонов.
Недавние достижения в технологии интегральных схем (ИС) сделали возможным создание активных фильтров полосы частот модулирующих сигналов, которые очень малы и недороги по сравнению с фильтрами ПЧ. Отсюда следует, что было бы желательно использовать активные фильтры полосы частот модулирующих сигналов на основе ИС для осуществления подавления значительных внедиапазонных сигналов, получая за этот счет возможность использовать меньшие и менее дорогие фильтры ПЧ, чтобы обеспечить подавление любого дополнительного требуемого сигнала. В активном фильтре чем выше коэффициент усиления, тем лучшее подавление можно получить. Но чем выше коэффициент усиления тем более подвержена система нежелательным смещениям постоянной составляющей. Подавление таких смещений постоянной составляющей желательно для того, чтобы максимизировать динамический диапазон имеющегося сигнала, минимизировать искажение демодулированного модулирующего сигнала, вызванное смещением постоянной составляющей, и минимизировать ошибки в оценках уровня модулирующего сигнала, вызванные смещением постоянной составляющей.
В стандартных цифровых системах, таких как системы с четырехпозиционной фазовой манипуляцией (ЧпФМн), используемые в стандартных МДКРК-системах связи (и некоторых МДВРК-системах), или системы с двухпозиционной фазовой манипуляцией (ДпФМн), информацию, заключенную в сигнале, восстанавливают посредством преобразования сигнала с понижением частоты до частоты, находящейся в полосе частот модулирующих сигналов, имеющей среднее значение на уровне постоянной составляющей. В этом случае смещения постоянной составляющей легко исключаются, поскольку несущая, как правило, все равно подавляется передатчиком. Следовательно, в полосе частот модулирующих сигналов можно использовать провал постоянной составляющей.
Тем не менее, для модуляций с постоянной амплитудой, таких как ЧМ и когерентная фазочастотная манипуляция (ЧМн) (которые используют в ЧМ-системах сотовых телефонов, таких как системы автоматической обработки сообщений (automatic message processing system - АМР)) (САОС), и гауссовская минимальная манипуляция (ГММн) (используемая в некоторых МДВРК-системах) несущую следует сохранять для демодуляции принятого сигнала.
Применение активных фильтров полосы частот модулирующих сигналов на основе ИС приводит к необходимости предусмотреть какой-либо механизм подавления нежелательных смещений постоянной составляющей. Цепь обработки сигналов ПЧ обычных цифровых приемников сотовых телефонов, как правило, включает в себя гетеродин (Г), имеющий частоту, выбранную таким образом, что частота несущей понижается до уровня постоянной составляющей. Для исключения нежелательных смещений постоянной составляющей используют простой узкополостный режекторный фильтр (фильтр-пробку) постоянной составляющей. Если ЧМ-, ЧМн- или ГММн-сигнал обрабатывают с помощью такой цепи обработки сигналов ПЧ, то подавление смещения постоянной составляющей исключит не только нежелательные смещения постоянной составляющей, но и важную амплитудно-фазовую информацию на частоте несущей. То есть в ЧМ-системах сотовых телефонов присутствует важная амплитудно-фазовая информация на частоте несущей, и если эту информацию разрушить, то будет оказано негативное влияние на эксплуатационные характеристики системы.
Однако есть две узкие полосы частот - между частотой несущей Fc и Fc + FI и между Fc и Fc - FI (где FI - ожидаемая наинизшая частота в спектре демодулированных сигналов; обычно FI = 300 Гц для сотовых ЧМ-систем), которые можно подавить без негативного влияния на демодулированный сигнал. Хотя в интермодуляционных составляющих и содержится минимальная речевая информация на частотах, близких к частоте несущей, эти составляющие редки и имеют относительно короткую длительность. Поэтому подавление низкочастотных интермодуляционных составляющих после преобразования с понижением частоты полосы частот модулирующих сигналов обычно не приводит к потере распознаваемой речевой информации. Аналогично, в ЧМн- и ГММн-системах присутствует очень малая мощность сигнала на частотах ниже FI = (скорость передачи символов)/100, так что и здесь полосу частот между Fc и Fc + FI можно подавлять без разрушения цифровой информации.
Поэтому поставлена еще одна техническая задача настоящего изобретения - разработка приемника с квадратурной демодуляцией, в котором можно использовать активные фильтры полосы частот модулирующих сигналов с высоким коэффициентом усиления и высокой избирательной способностью без потери информации на частоте несущей.
Краткое изложение существа изобретения
Настоящее изобретение является новым способом автоматической регулировки усиления и устройством регулировки мощности принятого ВЧ-сигнала в широком динамическом диапазоне. В предпочтительном варианте осуществления устройство автоматической регулировки усиления можно настраивать так, чтобы обеспечить заданную управляющую реакцию на различные характеристики замирания принятого ВЧ-сигнала. В приложениях, где интересующий сигнал представлен в цифровом формате подавленной несущей, таком как ДпФМн или ЧпФМн (для цифровых сотовых МДКРК-систем), или в формате когерентной фазовой модуляции с постоянной огибающей, таком как ГММн, ЧМн или ЧМ (используемых в сотовых фазовых системах с САОС), предлагаемое устройство способно обеспечить необходимую регулировку усиления, подавление внедиапазонных сигналов и преобразование с понижением частоты до частоты модулирующего сигнала без смещения постоянной составляющей.
В соответствии с настоящим изобретением предложено устройство автоматической регулировки усиления (АРУ) для двухрежимного приемника. Устройство АРУ включает усилитель с регулируемым коэффициентом усиления, имеющий входной порт для приема входного сигнала, порт управления для приема сигнала регулировки усиления и выходной порт для выдачи выходного сигнала. Соединенный с выходным портом понижающий преобразователь служит для перевода частоты выходного сигнала в частоту модулирующего сигнала, генерируя таким образом модулирующий сигнал. В предпочтительном варианте осуществления понижающий преобразователь служит для преобразования частоты несущей принятого сигнала для выходного сигнала в модулирующую частоту, смещенную на заданную величину от постоянной составляющей. Контур подавления проникающих сигналов постоянной составляющей, предназначенный для приема модулирующего сигнала, подавляет проникающие сигналы постоянной составляющей, выданные понижающим преобразователем, обеспечивая таким образом наличие скомпенсированного модулирующего сигнала.
Устройство АРУ дополнительно содержит средство генерирования принятого мощного сигнала на основании мощности выходного сигнала. Насыщающий интегратор сравнивает принятый мощный сигнал с опорным сигналом и вырабатывает сигнал регулировки усиления путем интегрирования или воздержания от интегрирования на основании величин опорного сигнала, принятого мощного сигнала и сигналов регулировки усиления.
Краткое описание чертежей
Отличительные признаки, технические задачи и преимущества настоящего изобретения поясняются ниже со ссылками на сопровождающие чертежи, на которых:
фиг. 1 изображает блок-схему варианта устройства, использующего предлагаемое устройство автоматической регулировки усиления (АРУ) согласно изобретению;
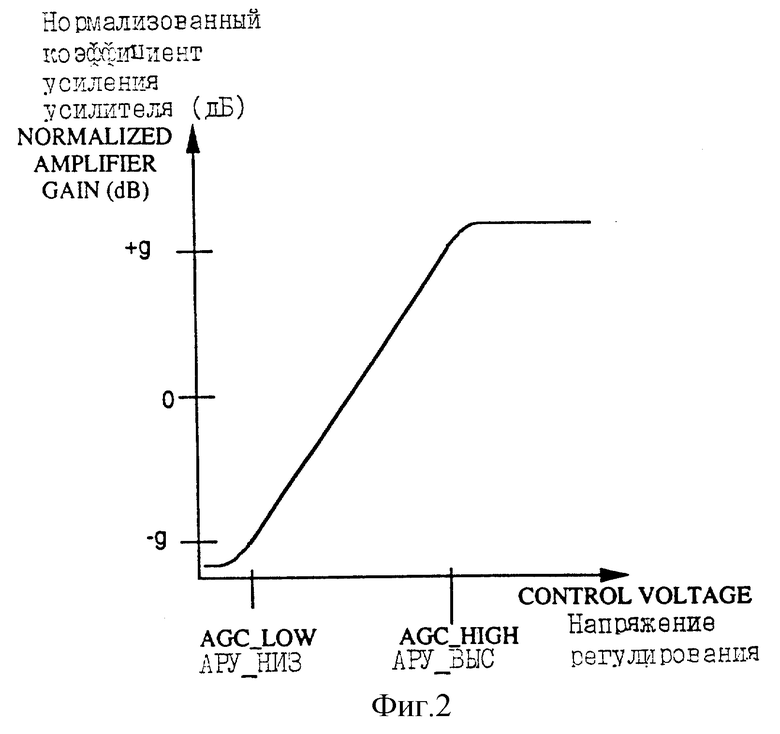
фиг. 2 изображает график изменения коэффициента усиления усилителя АРУ в зависимости от напряжения регулировки усиления согласно изобретению;
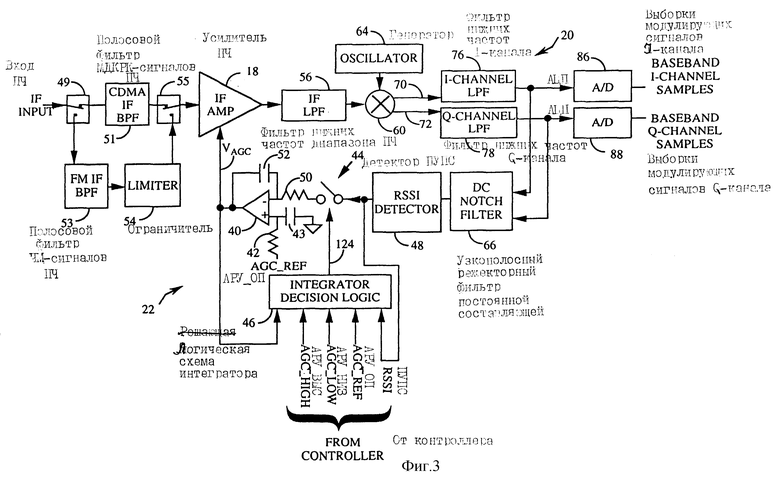
фиг. 3 изображает блок-схему варианта осуществления предлагаемого устройства автоматической регулировки усиления, которое включает контур регулирования в аналоговой форме, согласно изобретению;
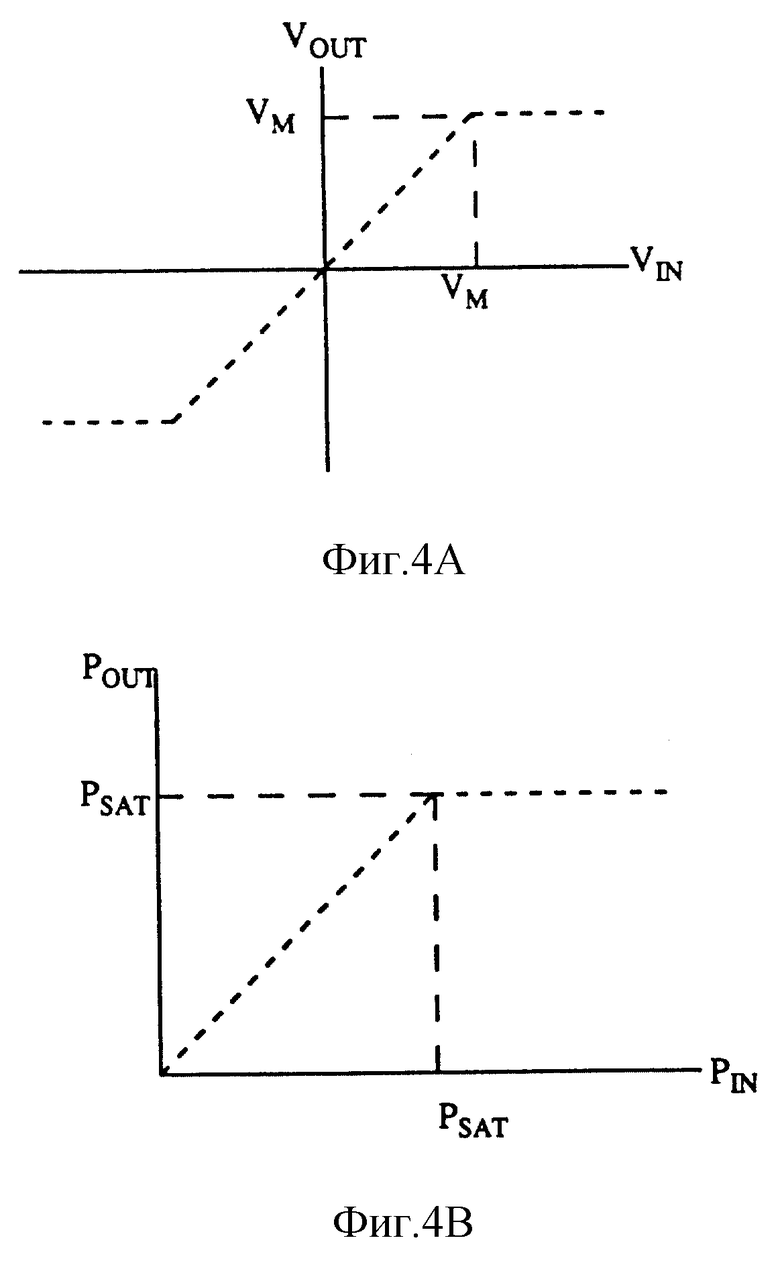
фиг. 4A и 4B изображает передаточные характеристики напряжения и мощности соответственно, связанные с примерным вариантом осуществления ограничителя сигнала, входящего в предлагаемое устройство регулировки усиления, согласно изобретению;
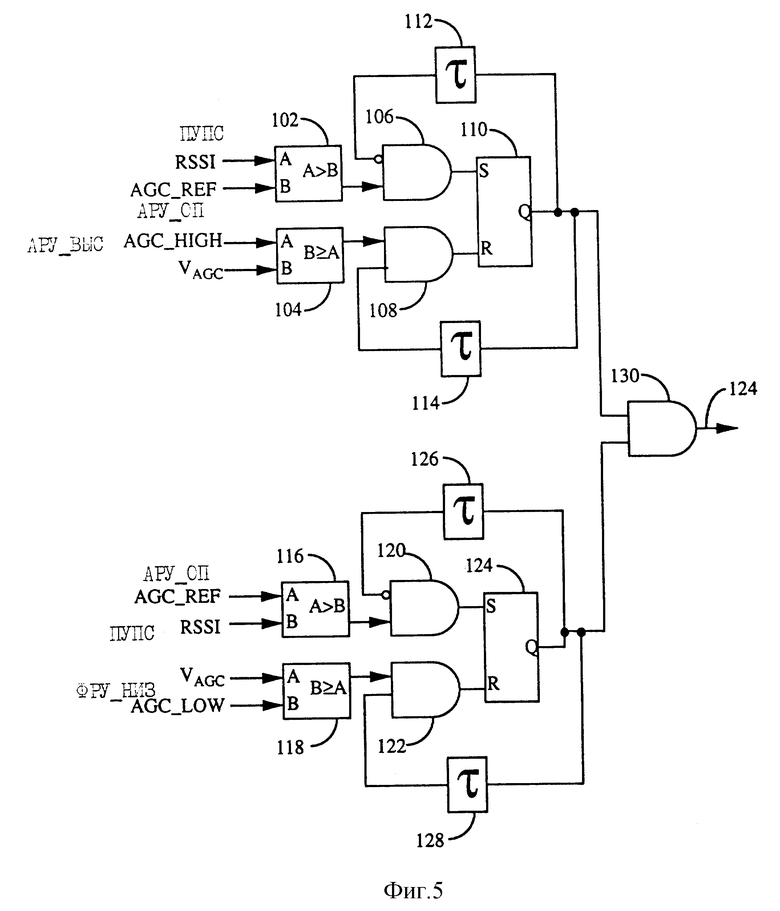
фиг. 5 изображает вариант воплощения логический схемы, используемой для управления работой переключателя управления интегратором, согласно изобретению;
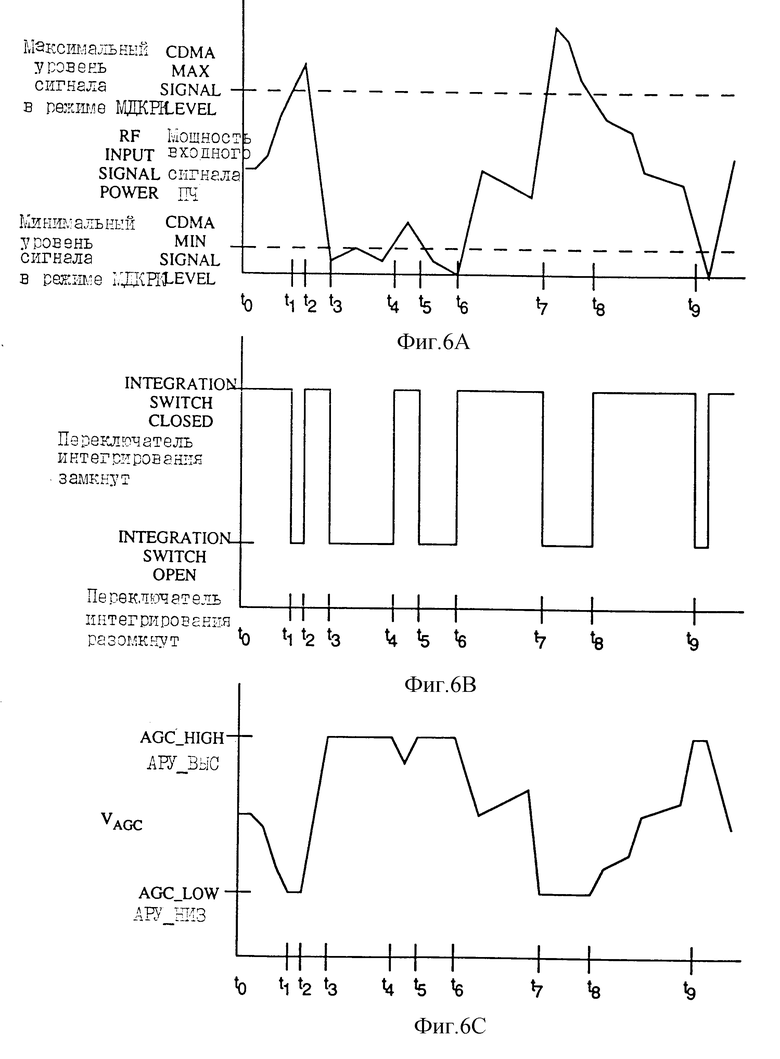
фиг. 6A - 6C представляют временные диаграммы, иллюстрирующие работу предлагаемого устройства АРУ, согласно изобретению;
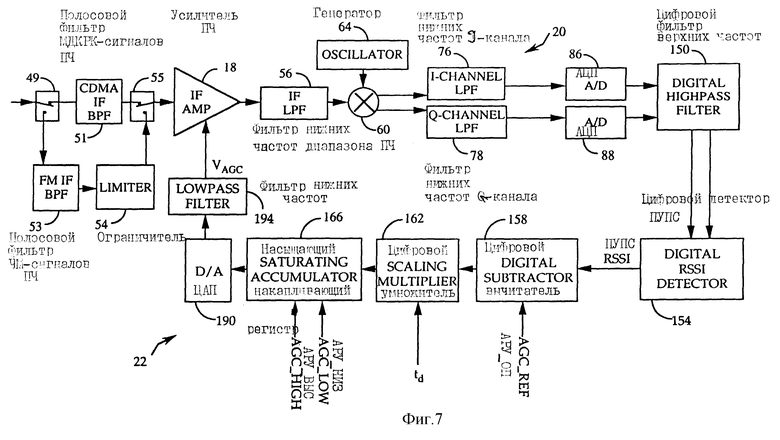
фиг. 7 изображает предпочтительный вариант воплощения предлагаемого устройства АРУ, включающего цифровую реализацию контура регулирования, согласно изобретению;
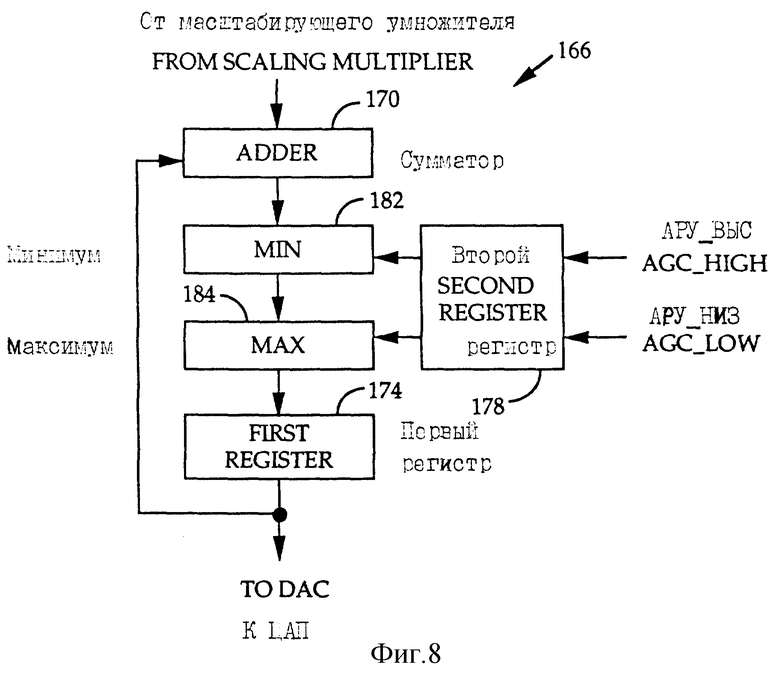
фиг. 8 изображает вариант воплощения цифрового насыщающего накапливающего регистра, входящего в интегратор, изображенный на фиг. 7, согласно изобретению;
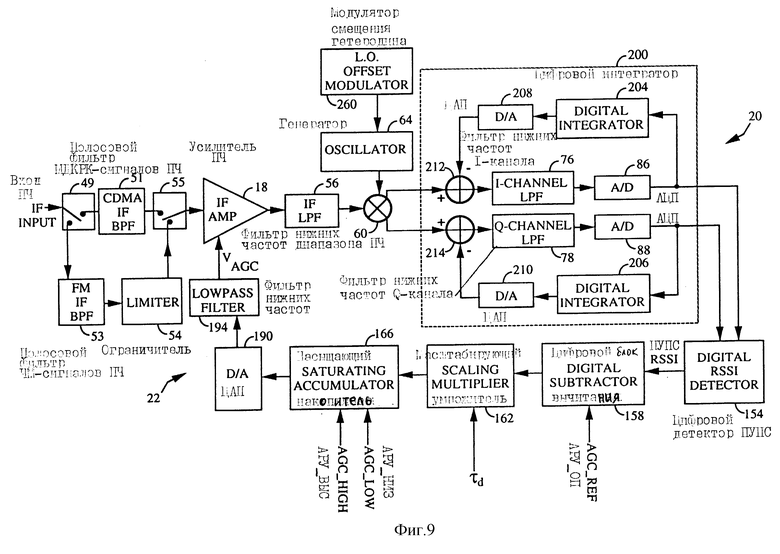
фиг. 9 изображает другой предпочтительный вариант осуществления предлагаемого контура АРУ, который включает контур подавления сигналов прохождения постоянной составляющей, согласно изобретению;
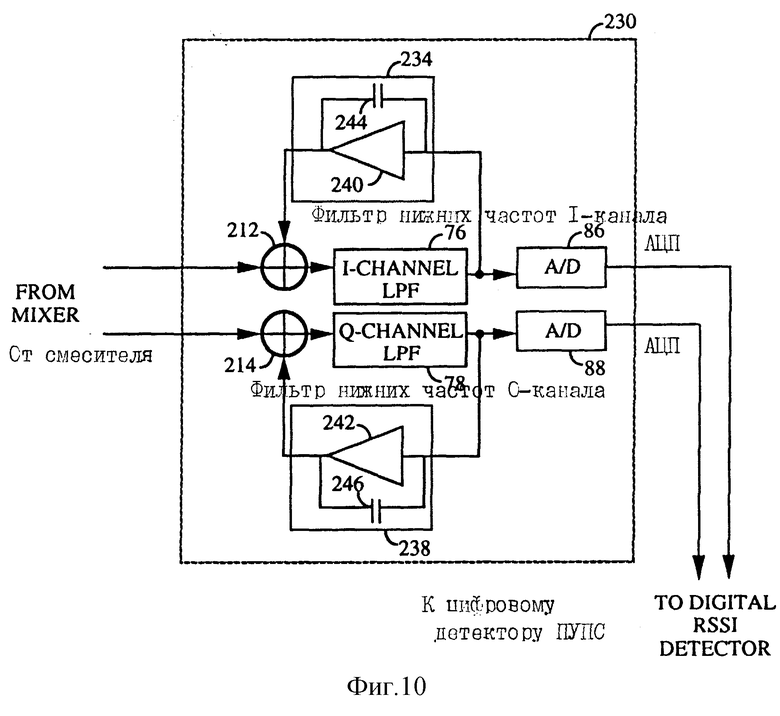
фиг. 10 изображает блок-схему аналогового контура подавления проникающих сигналов постоянной составляющей согласно изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
В цифровом приемнике, таком как используемый в цифровом устройстве сотовой радиосвязи с многостанционным доступом с кодовым разделением каналов (МДКРК), мощность обрабатываемого сигнала необходимо устанавливать на постоянном уровне. В условиях сотовой системы приемник может принимать сигнал, мощность которого претерпевает быстрые изменения в широком диапазоне значений. Чтобы надлежащим образом обработать цифровую информацию, содержащуюся в принятом сигнале, нужно регулировать мощность сигнала в приемнике. В двухрежимном цифровом приемнике, т.е. в цифровом приемнике, способном обрабатывать и МДКРК-сигналы (или МДВРК-сигналы), и стандартные ЧМ-сигналы, динамический диапазон принятого сигнала может изменяться в зависимости от выбранного рабочего режима. Поэтому предлагается устройство автоматической регулировки усиления для цифрового приемника, которое способно в каждом из рабочих режимов компенсировать отклонение мощности принятого сигнала в любой из двух систем сигналов.
Устройство автоматической регулировки усиления встроено в приемопередатчик переносного сотового МДКРК-телефона 10 (фиг. 1). Телефон 10 может быть двухрежимным, т.е. МДКРК-совместимым (или МДВРК-совместимым) и обычным ЧМ-совместимым. Предлагаемое устройство автоматической регулировки усиления способно обеспечить регулировку мощности и широкополосных МДКРК-сигналов (или МДВРК-сигналов), и узкополосных ЧМ-сигналов. Возможность такой схемы работать как с широкополосными, так и с узкополосными сигналами обеспечивает экономию затрат, элементов и мощности при создании приемника.
Телефон 10 включает антенну 12 для приема ВЧ-сигналов, включая МДКРК-сигналы или ЧМ-сигналы, переданные с базовой станции. Антенна 12 обеспечивает подачу принятых сигналов на антенный переключатель 14, который выдает принятые сигналы в приемную часть телефона 10. Антенный переключатель также принимает МДКРК- или ЧМ-сигналы связи от передающей части телефона 10 для выдачи их на антенну 12 и передачи на базовую станцию.
Принятые сигналы выдаются с антенного переключателя 14 на понижающий преобразователь 16, где ВЧ-сигналы преобразуются в сигналы диапазона более низких частот и выдаются далее как соответствующие сигналы промежуточной частоты (ПЧ). Сигналы ПЧ от понижающего преобразователя 16 подаются на ВЧ-усилитель 18 с автоматически регулируемым коэффициентом усиления. Сигналы ПЧ усиливаются с уровнем усиления, определяемым сигналом АРУ (VАРУ), который тоже подается на усилитель 18. Усилитель 18 способен обеспечить линейную регулировку усиления в широком динамическом диапазоне, например, - свыше 80 дБ, на основании VАРУ. Усилитель 18 может иметь конструкцию, раскрытую, например, в патенте США N 5099204 "Линейный усилитель с регулируемым коэффициентом усиления".
В вышеупомянутом патенте США N 5099204 используется схема компенсации для достижения желаемого динамического диапазона линейного регулирования. В конкретных вариантах осуществления, такое регулирование можно обеспечить посредством схемы усиления при отсутствии схемы компенсации. Среди таких вариантов осуществления есть, например, такие, в которых несколько ступеней усиления объединены в каскад. Точно так же можно за счет наличия источника высокого напряжения питания исключить схему компенсации.
Сигналы ПЧ регулируемого усиления из усилителя 18 поступают на второй понижающий преобразователь 20, где сигналы ПЧ преобразуются в сигналы диапазона более низких частот и выдаются далее как соответствующие синфазные и квадратурные модулирующие сигналы IBB и QBB. В варианте, изображенном на фиг. 1, модулирующие сигналы в рабочем режиме МДКРК представляют собой I- и Q-выборки закодированных цифровых данных, выдаваемые для дальнейшей фазовой демодуляции и корреляции. В двухрежимном приемнике понижающий преобразователь 20 также понижает частоту ЧМ-сигналов с формированием модулирующих ЧМ-синфазных и квадратурных сигналов, которые затем подвергаются фазовой/частотной демодуляции с формированием выходного аудиосигнала.
Детектор 25 замеряет уровень сигналов, выдаваемых понижающим преобразователем 20, и генерирует соответствующий сигнал показаний уровня принятого сигнала (ПУПС). Сигнал ПУПС вместе с опорным сигналом АРУ (АРУ_ОП), выдаваемым контроллером (на фиг. 1 не показан), подаются на схему 22 насыщающего интегратора. Сигнал АРУ_ОП соответствует желаемому уровню сигнала для модулирующих сигналов. Контроллер также выдает опорные сигналы предельно низкого уровня АРУ (АРУ_НИЗ) и предельно высокого уровня АРУ (АРУ_ВЫС) на насыщающий интегратор 22. Сигналы АРУ_НИЗ и АРУ_ВЫС соответствуют пределам изменения амплитуды сигнала регулировки усиления (VАРУ), подаваемого на порт управления усилителя 18 насыщающим интегратором 22.
На фиг. 2 показано, что очевидно наличие нелинейной характеристики коэффициента усиления усилителя 18 при относительно постоянных величинах напряжений регулирования, превышающих уровень АРУ_ВЫС и меньших, чем уровень АРУ_ НИЗ. Как правило, желательно ограничить величину VАРУ линейным диапазоном между уровнями АРУ_ ВЫС и АРУ_НИЗ, чтобы соответствующая постоянная времени контура регулирования оставалась в допустимом диапазоне. Отклонение постоянной времени этого контура за пределы допустимого диапазона могло бы привести к значительным ошибкам регулирования в контуре.
Как указано ниже, насыщающий интегратор 22 предназначен для интегрирования разности между сигналами ПУПС и АРУ_ОП, когда VАРУ находится в диапазоне между АРУ_ВЫС и АРУ_НИЗ. При наличии входного сигнала, который должен вызвать повышение VАРУ до величины, превышающей уровень АРУ_ВЫС, или понижение до величины, меньшей, чем уровень АРУ_НИЗ, интегратор 22 прекращает интегрирование и сигнал регулировки усиления VАРУ поддерживается постоянным либо на уровне АРУ_ВЫС, либо на уровне АРУ_НИЗ, за счет чего, как указано выше, улучшается реакция контура регулирования.
Насыщающий интегратор 22 (фиг. 1) принимает сигнал ПУПС от детектора 25 вместе с сигналом АРУ_ОП от контроллера. Чтобы обеспечить точную регулировку усиления, как правило, необходимо минимизировать разность между сигналом ПУПС и сигналом АРУ_ОП. Насыщающий интегратор 22 используют для выполнения этой функции в контуре АРУ путем сведения этой разности к нулю. Например, если усиление сигнала слишком велико, сигнал ПУПС также будет сигналом высокого уровня по сравнению с сигналом АРУ_ОП. Пока эти сигналы не станут сигналами равной амплитуды, выходной сигнал VАРУ интегратора будет продолжать уменьшать коэффициент усиления усилителя 18.
Следует понять, что замер ПУПС можно проводить в различные моменты при обработке принятого сигнала. Хотя на фиг. 1 показано, что такой замер проводят после понижения частоты понижающим преобразователем 20, его можно осуществлять в любой точке цепи обработки сигналов после усилителя 18 ПЧ. Замер ПУПС предпочтительно осуществляют после завершения фильтрации сигнала, минимизируя таким образом мощность структурно-подобной помехи при измерениях. При использовании аналоговых способов регулировки мощности как в случае широкополосных, так и в случае узкополосных сигналов можно использовать одни и те же схемы регулировки мощности для обоих режимов работы.
Что касается передающей части 30 переносного телефона, изображенного, то и здесь регулируется мощность передаваемых сигналов. Для осуществления непрерывного регулирования передаваемой мощности в режиме МДКРК тоже используется сигнал VАРУ. Сигнал VАРУ выдается в передающую часть 30 вместе с различными другими сигналами управления от контроллера (не показан).
На фиг. 3 изображен примерный вариант осуществления предлагаемого устройства автоматической регулировки усиления, которое включает частично аналоговую реализацию насыщающего интегратора 22. Насыщающий интегратор включает в себя интегратор 40 с операционным усилителем (оп. ус.) с контуром емкостной обратной связи. В частности, интегратор 40 принимает сигнал АРУ_ОП через посредство резистора 42 на его неинвертирующем входе, к которому также подсоединен конденсатор 43. Когда переключатель 44 замыкается в ответ на управляющую информацию, обеспечиваемую решающей логической схемой 46 интегратора, сигнал ПУПС выданный детектором 48, принимается интегратором 40 через резистор 50. Когда переключатель 44 удерживается в разомкнутом положении в ответ на управляющую информацию с решающей логической схемы 46 интегратора, конденсатор 52 служит для поддержания выходного сигнала (VАРУ) интегратора 40 постоянным на уровне АРУ_ВЫС, либо на уровне АРУ_НИЗ. Это предотвращает насыщение усилителя 18, когда амплитуда входного сигнала ПЧ выходит за пределы заданного динамического диапазона.
ВЧ-переключатели 49 и 55 подключают полосовой фильтр 51 МДКРК-сигналов ПЧ к усилителю 18 ПЧ в режиме МДКРК, которому соответствует установке переключателей, изображенная на фиг. 3. В режиме ЧМ положение ВЧ-переключателей 49 и 55 изменяется для того, чтобы подключить полосовой фильтр 53 ЧМ-сигналов ПЧ и ограничитель 54 к усилителю 18 ПЧ. Полосовой фильтр 53 ЧМ-сигналов ПЧ для подавления внедиапазонной помехи определяет ширину полосы ЧМ-сигналов, подаваемых через ограничитель 54 на усилитель 18 ПЧ. Например, при работе в режиме ЧМ фильтр 53 ЧМ-сигналов ПЧ должен иметь полосу пропускания шириной приблизительно в один сотовый канал (например, 30 кГц) и полосу задерживания, границы которой значительно удалены (например, на величину ± 60 кГц) от средней частоты диапазона ПЧ. Во время работы в режиме МДКРК фильтр 51 МДКРК-сигналов ПЧ предназначен для подавления внедиапазонной помехи и определяет ширину полосы МДКРК-сигналов, подаваемых на усилитель 18. Например, в режиме МДКРК полосовой фильтр 51 МДКРК-сигналов ПЧ может обеспечить полосу пропускания, соответствующую частоте следования элементарных посылок сигналов модулирующей части приемника (например, 1,26 H МГц) и обеспечивает заданную ширину полосы подавления (например, H 1,8 МГц). В другом варианте ограничитель 54 может стоять в общей цепочке перед усилителем 18 ПЧ.
Ограничитель 54 ослабляет ВЧ-сигналы высокой мощности, которые главным образом принимаются во время работы в режиме ЧМ. ЧМ-сигналы могут иметь мощность, превышающую мощность сигналов, с которыми приходится иметь дело при работе в режиме МДКРК. В предпочтительном варианте осуществления изобретения ограничитель 54 ограничивает входную мощность сигналов, подаваемых на усилитель 18, динамическим диапазоном, например, 80 дБ, характерным для режима работы МДКРК. Ограничитель 54 позволяет получать требуемый диапазон регулирования контура автоматической регулировки усиления (АРУ) на основе ожидаемого динамического диапазона МДКРК, исключая тем самым потребность в обеспечении отдельных калиброванных контуров управления АРУ для работы в режимах ЧМ и МДКРК.
На фиг. 4A и 4B отображены соответственно передаточные характеристики напряжения и мощности, связанные с примерным вариантом осуществления ограничителя 54. Следует отметить, что ограничитель 54 не ослабляет сигналы, имеющие амплитуды напряжения меньше заданного максимального напряжения Vm. Мощность насыщения можно задать в виде PSAT = Vm 2/2PL, где PL - обозначает полное сопротивление входной нагрузки усилителя 18. Если входная мощность превышает PSAT, мощность выходного сигнала, вырабатываемого ограничителем 54, поддерживается постоянной примерно на уровне PSAT путем ограничения пикового напряжения сигнала величиной напряжения Vm. Величину PSAT следует выбирать на основании максимального ожидаемого уровня входной мощности в режиме МДКРК. Поэтому синусоидальные входные сигналы ПЧ высокой мощности (Pin > PSAT) приводят к тому, что выходной сигнал, вырабатываемый ограничителем 54, срезается до фиксированной амплитуды, но имеет ту же самую основную частоту, и фазовая информация не теряется. Гармонические искажения, вносимые ограничителем, исключают с помощью фильтра 56 нижних частот.
Фильтр 56 нижних частот, входящий в понижающий преобразователь 20, должен иметь частоту среза больше, чем частота сигнала ПЧ на выходе усилителя 18 в режиме МДКРК или ЧМ. Как отмечалось выше, фильтр 56 нижних частот предназначен для затухания гармоник сигнала ПЧ на выходе усилителем 18 до преобразования с понижением частоты и формированием синфазной (I) и квадратурной (сдвинутой по фазе на 90o - Q) составляющих. Наличие ограниченных ограничителем 54 сигналов высокой мощности вызывает создание нежелательных гармоник. Фильтр 56 нижних частот диапазона ПЧ исключает нежелательные гармоники, так что они не преобразуются в полосу частот модулирующих сигналов вместе с желаемой информацией, заключенной в сигналах ПЧ. В описываемом варианте осуществления тип, порядок и границу полосы пропускания фильтра 56 выбирают так, чтобы внести затухание в составляющие искажения в полосе частот модулирующих сигналов, возникающие из гармоник ПЧ, содержащихся в усиленном сигнале ПЧ, выработанном усилителем 18.
Отфильтрованный сигнал ПЧ подается на первый вход смесителя 60, тогда как на другой вход смесителя 60 поступает опорный сигнал, генерируемый гетеродином генератора 64. Смеситель 60 смешивает отфильтрованный сигнал ПЧ с опорным сигналом для получения I и Q (квадратурной) составляющих модулирующих сигналов на выходных линиях 70 и 72 соответственно. Смеситель 60 предназначен для преобразования частоты, которая смещена от средней частоты диапазона ПЧ на заданное расстояние, например от 3 до 300 Гц, в частоту постоянной составляющей модулирующих сигналов. Такое поле смещения постоянной составляющей позволяет контуру автоматической регулировки усиления, изображенному на фиг. 3, распознавать немодулированный ЧМ-сигнал (т.е. незатухающий гармонический сигнал НГ-сигнала) от ошибки вследствие смещения постоянной составляющей на входе. В частности, смеситель 60 предпочтительно будет генерировать выходную частоту приблизительно 100 Гц в ответ на входной НГ-сигнал на присвоенной частоте диапазона ПЧ. Таким образом, ошибки вследствие смещения постоянной составляющей на входе, вызывающие искажение результатов определения мощности сигнала ПУПС, исключаются узкополосным режекторным фильтром 66 постоянной составляющей без потерь информации, заключенной в НГ-сигнале.
Выходные линии 70 (фиг. 3) и 72 соединены соответственно со схемами 76 и 78 фильтров нижних частот I- и Q-каналов модулирующих сигналов. Каждую из схем 76 и 78 фильтров предпочтительно выполнять так, чтобы обеспечить при работе в режимах ЧМ и МДКРК передаточные функции в диапазоне нижних частот с частотами среза 13 кГц и 630 кГц соответственно. В указанном варианте осуществления изобретения каждый фильтр 76 и 78 включает пару фильтров, один из которых применяется при работе в режиме МДКРК, а другой - при работе в режиме ЧМ. Отдельные фильтры, входящие в схемы фильтров 76 и 78, переключаются на I- и Q-каналы модулирующих сигналов соответственно, в зависимости от режима работы. В предпочтительном варианте осуществления контроллер системы включает в себя средство переключения фильтров, входящих в схемы фильтров, в соответствии с выбранным режимом работы.
Помимо выполнения своих функций и функции защиты от наложения спектров АЦП 86 и 88, фильтры 76 и 78 нижних частот также обеспечивают подавление внедиапазонных сигналов. В предпочтительном варианте осуществления фильтры 76 и 78 имеют высокий коэффициент усиления и обеспечивают подавление в широкой полосе задерживания. В результате этого полосовые фильтры 51 и 53 ПЧ могут иметь более узкую полосу задерживания и, следовательно, быть менее дорогими.
После фильтрации с помощью схем 76, 78 фильтров модулирующих сигналов и узкополосного режекторного фильтра 66 постоянной составляющей полученные модулирующие сигналы I- и Q-каналов подаются на детектор 48 сигналов ПУПС. Детектор 48 сигналов ПУПС вырабатывает выходной сигнал ПУПС, отображающий измеренную мощность сигнала (в дБ). Разность между сигналом ПУПС, выданным детектором 48 сигналов ПУПС и сигналом АРУ_ОП интегрируется в насыщающем интеграторе 22 с получением напряжения регулирования VАРУ.
I- и Q-выходы схем 76 и 78 фильтров модулирующих сигналов также подключены к I- и Q-каналам аналого-цифровых преобразователей АЦП 86 и 88 соответственно. АЦП 86 и 88 осуществляют квантование модулирующих сигналов I- и Q-каналов для цифровой демодуляции в выбранном рабочем режиме, т.е. либо в режиме МДКРК, либо в режиме ЧМ. В предпочтительном варианте осуществления динамический диапазон АЦП 86 и 88 выбирают таким, чтобы он был достаточным для согласования с сигналами, с которыми предполагается иметь дело в диапазоне управления, обеспечиваемом устройством АРУ усилителя 18 ПЧ. Как отмечалось выше, логическая схема 46 в насыщающем интеграторе 22 ограничивает напряжение регулирования VАРУ диапазоном АРУ_НИЗ < VАРУ < АРУ_ВЫС. Это предохраняет усилитель 18 от насыщения и работы в нелинейной области рабочей характеристики.
Поэтому АЦП 86 и 88 скомпонованы так, чтобы квантовать входные сигналы без существенных искажений вне зависимости от того, насыщен интегратор 40 или нет. В предпочтительном варианте осуществления каждый из АЦП 86 и 88 обеспечивает 6 - 8 разрядов динамического диапазона. Этот динамический диапазон достаточен для предотвращения понижения отношения "сигнал - шум" входа в АЦП 86 и 88 по сравнению с отношением "сигнал - шум" квантованного цифрового выхода АЦП 86 и 88 для любого входного уровня ВЧ-сигналов. Например, когда VАРУ достигает уровня АРУ_НИЗ, ограничитель 54 ограничивает амплитуду ВЧ-сигнала. Таким образом, уровень сигнала на входе АЦП 86 и 88 может превышать уровень, заданный значением АРУ_ОП, на некоторую фиксированную величину. Следовательно, АЦП 86 и 88 будут продолжать точно квантовать модулирующие сигналы на повышенном уровне.
Точно так же динамический диапазон АЦП 86 и 88 достаточен для предотвращения понижения отношения "сигнал - шум" на низких уровнях входных модулирующих ВЧ-сигналов. Например, когда VАРУ достигает величины АРУ_ВЫС и переключатель 44 размыкается, если входной ВЧ-сигнал продолжает спадать, то уровень модулирующего сигнала на входе АЦП 86 и 88 падает ниже уровня, заданного значением АРУ_ОП. Сниженный уровень сигнала, подаваемого на АЦП 86 и 88, приводит к использованию устройства не в полном объеме, т.е. некоторые разряды выхода АЦП 86 и 88 не используются. При больших входных ВЧ-сигналах в процессе преобразования используется весь динамический диапазон АЦП 86 и 88. Следовательно, предлагаемое устройство АРУ дает возможность использовать контур управления АРУ при демодуляции сигналов, занимающих значительно больший диапазон, чем диапазон регулирования усилителя 18 ПЧ.
Вариант воплощения логической схемы 46, предназначенной для управления положением переключателя 44, представлен на фиг. 5. Сигналы АРУ_ВЫС и VАРУ подаются на логический компаратор 104. Когда VАРУ превышает уровень АРУ_ВЫС, на выходе компаратора 104 появляется логическая единица "1". Выходной сигнал компаратора 104 пропускается через логический элемент "И" 104 вместе с выходным сигналом триггера 110, представляющим собой логическую единицу "1" ввиду замкнутого положения переключателя 44. Выходной сигнал триггера 110 задерживается на элементе задержки 114, чтобы предотвратить избыточное, вызванное структурно-подобной помехой срабатывание переключателя 44. Логический элемент "И" 108 и элемент задержки 114 предназначены для предотвращения размыкания переключателя 44 до тех пор, пока не пройдет некоторый заданный период времени после его замыкания. Уровень выходного сигнала логического элемента "И" 108 изменяется с низкого на высокий, вызывая таким образом переброс выходного сигнала триггера 110 на уровень логического нуля "0", формирование логического нуля "0" на выходе логического элемента "И" 130 и размыкание переключателя 44. Когда переключатель 44 размыкается, сигнал ПУПС и сигнал АРУ_ ОП больше не поддерживаются равными посредством контура. В случае, когда уровень АРУ_ ВЫС превышен и контур разомкнут, сигнал ПУПС указывает на наличие уровня сигнала, меньшего, чем АРУ_ОП, и на выходе логического компаратора 102 появляется логический нуль "0". Когда сигнал АРУ_ ОП превышает уровень АРУ_ ОП, уровень выходного сигнала компаратора 102 становится высоким, и уровень выходного сигнала логического элемента "И" 106 тоже становится высоким, вызывая таким образом переброс выходного сигнала триггера 110 на уровень логической единицы "1" и замыкание переключателя 44. Элемент задержки 112 и логический элемент "И" 106 функционируют аналогично элементу задержки 114 и логическому элементу "И" 108 и предотвращают замыкание переключателя 44 до тех пор, пока не пройдет заданный период времени после размыкания.
Аналоговая последовательность логических операций выполняется, когда уровень входного ВЧ-сигнала превышает пределы диапазона АРУ. Когда VАРУ падает ниже уровня АРУ_НИЗ, на выходе компаратора 118 появляется логическая единица "1". Выходной сигнал компаратора 118 пропускается через логический элемент "И" вместе с выходным сигналом триггера 124, представляющим собой логическую единицу "1", когда переключатель 44 замкнут. После этого происходит переброс выходного сигнала логического элемента 122 с низкого уровня на высокий, вызывал таким образом переброс выходного сигнала триггера 124 на уровень логического нуля "0". Это вызывает появление логического нуля "0" на выходе логического элемента "И" 130, что приводит к размыканию переключателя 44. Когда переключатель 44 разомкнут, контур больше не поддерживает сигнал ПУПС равным сигналу АРУ_ОП. Когда контур разомкнут, сигнал ПУПС будет больше АРУ_ ОП, и на выходе логического компаратора 116 будет логический нуль "0". Когда сигнал ПУПС становится меньше АРУ_ОП, происходит переброс выходных сигналов компаратора 116 и логического элемента 120 на высокий уровень. Этот переброс устанавливает на выходе триггера 124 логическую единицу "1" и замыкает переключатель 44. Элементы задержки 126 и 128 и логические элементы "И" 120 и 122 функционируют аналогично элементу задержки 114 и логическому элементу "И" 108 и служат для предотвращения очень быстрого срабатывания переключателя 44 из разомкнутого положения в замкнутое и наоборот.
Сигнал на логическом выходе логического элемента "И" 130 можно рассматривать как сигнал подготовки к интегрированию, отображенный шиной 124 управления переключателем, соединенной с переключателем 44. В предпочтительном варианте переключатель 44 замыкается в ответ на выдачу логической единицы "1" через посредство шины управления 124 и размыкается в ответ на выдачу логического нуля "0" через посредство этой шины. Логическая схема 46 интегратора осуществляет управление, когда интегратор 40 с операционным усилителем интегрирует разность сигналов ПУПС и АРУ_ОП. Таким образом, логическая схема 46 интегратора и интегратор 40 взаимодействуют, формируя напряжение VАРУ. Работу устройства АРУ (фиг. 3) можно описать подробнее со ссылками на временные диаграммы (фиг. 6A - 6C), которые отображают изменение во времени мощности примерного ВЧ-сигнала и соответствующее положение (замкнутое или разомкнутое) переключателя 44 в насыщающем интеграторе 22. На фиг. 6C изображена соответствующая величина напряжения регулировки усиления VАРУ, генерируемого интегратором 40 с операционным усилителем в ответ на входной ВЧ-сигнал (фиг. 6A).
На первом интервале интегрирования (t0 < t < t1) мощность входного ВЧ-сигнала находится в диапазоне управления АРУ контура АРУ и соответствует значениям АРУ_ НИЗ < VАРУ < АРУ_ВЫС (фиг. 6C). В момент t = t1 логическая схема 46 интегратора определяет, что напряжение VАРУ достигло уровня АРУ_ НИЗ, а затем размыкает переключатель 44. Переключатель 44 остается разомкнутым на интервале времени t1 < t < t2, в течение которого интегратор 40 не интегрирует разность между ПУПС и АРУ_ОП. В течение этого времени выходной сигнал АЦП 86 и 88 ограничен ограничителем 54. В момент t = t2 мощность входного ВЧ-сигнала снова становится меньше величины, определяемой верхней границей диапазона управления контуром, что приводит к тому, что логическая схема 46 интегратора замыкает переключатель 44, а VАРУ превышает уровень АРУ_НИЗ. После этого переключатель 44 остается замкнутым на втором интервале интегрирования (t2 < t < t3) до тех пор, пока напряжение регулирования VАРУ не достигнет уровня АРУ_ВЫС, и в этот момент логическая схема 46 интегратора снова размыкает переключатель 44. В этот период времени выходной сигнал АЦП 86 и 88 изменяется в ответ на изменения уровня входного ВЧ-сигнала. Аналогичным образом логическая схема 46 интегратора замыкает переключатель 44 в моменты t4, t6 и t8, чтобы начать третий, четвертый и пятый интервалы интегрирования.
В варианте осуществления, описанном ниже, контур АРУ включает цифровую реализацию насыщающего интегратора 22, где используется цифровой фильтр 150 верхних частот, а не узкополосный режекторный фильтр 66 постоянной составляющей, для исключения смещения постоянной составляющей в выборках модулирующих сигналов I- и Q-каналов, генерируемых АЦП 86 и 88. Частоту среза фильтра 150 выбирают значительно меньшей, чем смещение частоты, вносимое в смесителе 60. В альтернативном варианте выполнения можно добиться исключения смещения постоянной составляющей путем:
раздельного определения средних значений выборок модулирующих сигналов I- и Q-каналов, и
вычитания результирующей постоянной составляющей из каждой составляющей I- и Q-сигналов для дальнейшей обработки.
Цифровой детектор 154 ПУПС должен, как правило, включать таблицу преобразования, содержащую величины логарифмов мощности в функции амплитуд выборок модулирующих сигналов I- и Q-каналов. Цифровой интегратор 154 аппроксимирует логарифм мощности, т.е.IOLOG (I2 + Q2), определяя величину LOG (MAX {ABS(I), ABS(Q)} ) и величину составляющей поправки. Операция MAX {ABS(I), ABS(Q)} дает выходную величину, равную амплитуде наибольшей составляющей из данной пары выборок I/Q-сигналов. В конкретном варианте эта выходная величина служит указателем для обращения к таблице преобразования, содержащей величины логарифмов мощности. Выходную величину, получаемую из таблицы преобразования, затем прибавляют к величине составляющей поправки, приблизительно равной разности между LOG (I2 + Q2) и LOG (MAX {ABS(I), ABS(Q)}).
Производится оценка мощности принятого сигнала, т.е. сигнал ПУПС, вырабатываемый детектором 154 ПУПС, подается на цифровой блок вычитания 158 вместе с сигналом АРУ_ ОП. Получаемый сигнал ошибки затем масштабируется масштабирующим умножителем 162 в соответствии с желаемой постоянной времени td контура. Постоянную времени td контура выбирают в соответствии с характеристиками замирания входного ВЧ-сигнала. Как правило, следует выбирать относительно небольшие постоянные времени (более быстрое срабатывание контура), чтобы обеспечить отслеживание сигналов с крутыми характеристиками замирания, не замедляя срабатывание контура, до уровня, который не вызывает избыточного последействия или "звона", определяемого задержками, вносимыми в контур фильтрами и другими элементами.
В предпочтительном варианте масштабирующий умножитель 162 можно запрограммировать на умножение сигнала ошибки от вычитателя 158 на первую постоянную времени контура в ответ на убывание сигналов ПУПС и на умножение на вторую постоянную времени контура, когда величина сигнала ПУПС возрастает. Это позволяет достичь дополнительной гибкости в подстройке реакции контура АРУ на основе характеристик замирания, присущих рабочей аппаратуре, и минимизирует последействие контура.
Масштабированный сигнал ошибки, выработанный масштабирующим умножителем 162 (фиг. 7), подается на насыщающий накопитель 166. Регистр 166 накапливает величины масштабированных сигналов ошибки с образованием сигнала накопленной ошибки до тех пор, пока сигнал накопленной ошибки не достигнет либо уровня АРУ_ ВЫС, либо уровня АРУ_НИЗ. Затем величину сигнала накопленной ошибки поддерживают либо на уровне АРУ_ВЫС, либо на уровне АРУ_НИЗ до тех пор, пока не будет принят масштабированный сигнал ошибки, который при комбинировании с имеющимся сигналом накопленной ошибки дает сигнал накопленной ошибки в диапазоне, ограниченном уровнями АРУ_ВЫС и АРУ_НИЗ.
Вариант насыщающего накопителя 166 с дискретизацией во времени показан на фиг. 8. Масштабированный сигнал ошибки подается на первый вход цифрового сумматора 170. Масштабированный сигнал ошибки суммируется в цифровом сумматоре 170 с сигналом накопленной ошибки, выработанным на предыдущем интервале времени насыщающим накапливающим регистром 166, причем сигнал накопленной ошибки запоминается в регистре 174. Величины АРУ_ВЫС и АРУ_НИЗ, подаваемые контроллером системы (не показан) запоминаются во втором регистре 178. Ограничители 182 и 184 сигнала по минимуму и максимуму, подключенные ко второму регистру 178, ограничивают величину цифрового сигнала, выдаваемого на первый регистр 174, диапазоном, ограниченным уровнями АРУ_ВЫС и АРУ_НИЗ.
Цифровая реализация фильтра 150 верхних частот, детектора 154 ПУПС и насыщающего генератора 22 позволяет получить серьезные преимущества по сравнению с соответствующими аналоговыми реализациями. Например, используемые цифровые элементы не подвержены отклонению параметров под влиянием температуры и позволяют регулировать постоянную времени в соответствии с ожидаемыми условиями, чтобы осуществить получение сигналов с помощью контура. Кроме того, фильтр и интегратор, реализованные в цифровой форме, занимают значительно меньший объем, чем соответствующая конструкция из дискретных резистивных и емкостных элементов.
Предполагается, что использование цифрового детектора ПУПС и цифрового насыщающего интегратора приведет к повышению точности. В частности, в течение периода, когда величину VАРУ требуется поддерживать либо на уровне АРУ_ ВЫС, либо на уровне АРУ_НИЗ, емкостной разряд, связанный с аналоговыми элементами, будет, как правило, приводить к "провисанию" (относительному спаду) величины VАРУ от желаемого уровня через некоторый период времени. Цифровая реализация насыщающего интегратора не проявляет характеристик "провисания" (относительного спада), характерных для аналоговых устройств.
Сигнал управления, хранящийся в регистре 174 насыщающего накопителя 166, подается на цифроаналоговый преобразователь (ЦАП) 190. В предпочтительном варианте осуществления разрешение ЦАП 190 будет достаточным для обеспечения размера выходного аналогового шага АРУ менее 1 дБ. В другом варианте генерируется последовательность подвергнутых плотностно-импульсной модуляции (ПИМ) или широтно-импульсной модуляции (ШИМ) выходных импульсов уровней логического нуля "0" и логической единицы "1" в ответ на сигнал управления. Средняя величина напряжения последовательности выходных импульсов соответствует желаемому напряжению аналогового выходного сигнала.
Аналоговый выходной сигнал, выработанный ЦАП 190, пропускается через фильтр 194 нижних частот перед подачей на порт управления усилением усилителя 18 ПЧ. Фильтр 194 нижних частот предназначен для ослабления любой выходной помехи, генерируемой ЦАП 190.
Обращаясь теперь к фиг. 9, отмечаем, что здесь изображен другой предпочтительный вариант предлагаемого контура АРУ, предназначенный преимущественно для подавления нежелательных составляющих сигнала смещения постоянной составляющей без одновременного разрушения информации, заключенной в сигнале несущей частоты. Контур АРУ на фиг. 9 в значительной степени подобен контуру АРУ, изображенному на фиг. 7, и поэтому одинаковые цифровые позиции использованы для обозначения одинаковых элементов схемы. Как отмечалось в разделе "Предпосылки к созданию изобретения", в приемнике с цифровой модуляцией, такой как ЧпФМн или ДпФМн, общим правилом является такой выбор частоты гетеродина (Г) в цепочке обработки сигналов ПЧ, что несущую частоту принимаемого сигнала понижают (т.е. преобразуют) до постоянной составляющей. Однако и здесь последующая модулирующая обработка, предназначенная для подавления нежелательных проникающих сигналов постоянной составляющей, пропускаемых смесителем 60, также имеет тенденцию к разрушению информации сигнала, центрируемого вокруг принятой несущей, что проявляется в таких схемах модуляции, как ЧМ и когерентная фазочастотная манипуляция.
В соответствии с одним аспектом изобретения частоту гетеродина генератора 64 ПЧ выбирают так, чтобы несущая частота принятого сигнала преобразовывалась в модулирующую частоту, смещенную относительно постоянной составляющей на заданную величину. Контур 200 подавления проникающих сигналов постоянной составляющей позволяет исключить проникновение нежелательной постоянной составляющей при сохранении в то же время информации сигнала на принятой несущей частоте. В предпочтительном варианте частоту гетеродина выбирают смещенной на незначительную величину (например, H 100 Гц) от несущей частоты, что номинально приводит к преобразованию принятого спектра с понижением частоты до полосы частот модулирующих сигналов. Отсюда следует, что энергия сигналов I- и Q-каналов, выдаваемая смесителем 60 при заданной частоте смещения (например, H 100 Гц), соответствует информации, отраженной в несущей частоте принятых сигналов. Спектр пониженных частот, включая информацию, заключенную в несущей, пропускается в АЦП 86, 88, тогда как нежелательный проникающий сигнал постоянной составляющей от смесителя 60 подавляется. Хотя этот процесс приводит к понижению энергии на частоте, смещенной от принятой несущей частоты на заданную величину, во многих случаях (например, при передаче речевой информации) энергия подавленных низких частот несет минимальную полезную информацию сигнала. Поэтому контур 200 подавления постоянной составляющей преимущественно позволяет исключить чужеродный проникающий сигнал прохождения постоянной составляющей без разрушения информации, присутствующей на несущей частоте принятых сигналов.
Контур 200 (фиг. 9) подавления сигналов прохождения постоянной составляющей включает цифровые интеграторы 204 и 206 I- и Q-каналов, имеющие входные порты, функционально связанные с выходами фильтров 76 и 78 нижних частот посредством АЦП 86 и 88 соответственно. В описываемом варианте интеграторы 204 и 206 предназначены для интегрирования цифровых выходных сигналов АЦП 86 и 88. Результаты каждого интегрирования преобразуются в аналоговые сигналы цифроаналоговыми преобразователями (ЦАП) 208 и 210 I- и Q-каналов, которые расположены между интеграторами 204 и 208 и аналоговыми блоками вычитания 212 и 214. Постоянную усиления интеграторов 204 и 206 можно выбрать так, что интеграторы 204 и 206 не будут реагировать на мощность сигналов на частотах уровня 100 Гц и выше. Полученные сигналы исключения постоянной составляющей, генерируемые интеграторами 204 и 206, номинально равны ошибкам смещения нежелательной постоянной составляющей, вносимым при прохождении сигналов смесителем 60, фильтрами 76 и 78 нижних частот и АЦП 86 и 88. Таким образом гарантируется, что уровень мощности, подводимой к АЦП 86 и 88, а следовательно, и к схеме 154 ПУПС, является показателем уровня мощности сигналов, на самом деле принятых схемой 22 АРУ. Следовательно, контур 200 подавления проникающих сигналов постоянной составляющей функционирует для поддержания целостности уровня мощности принятого сигнала даже во время исключения нежелательных проникающих сигналов постоянной составляющей.
Аналоговая реализация контура 230 подавления сигналов проникающих сигналов постоянной составляющей, который можно установить в схеме на фиг. 9 вместо контура 200, показана на фиг. 10. Контур 230 предназначен для исключения нежелательных проникающих сигналов постоянной составляющей при одновременном сохранении уровня мощности сигналов, подаваемых на детектор 154 ПУПС. Частоту гетеродина генератора 64 ПЧ (фиг. 9) выбирают так, чтобы преобразовать несущую частоту в частоту модулирующего сигнала, смещенную от постоянной составляющей на заданную величину. Контур 230 обеспечивает подавление проникающих сигналов постоянной составляющей способом, по существу аналогичным тому, который был описан применительно к контуру подавления 200, т. е. исключением нежелательных проникающих сигналов постоянной составляющей при одновременном сохранении информации сигнала на принятой несущей частоте. В частности, за счет надлежащего выбора коэффициентов усиления интеграторов 234 и 238 информацию, заключенную в несущей частоте, подвергнутой преобразованию с понижением до частоты смещения, пропускают на АЦП 86 и 88. Как обсуждалось выше, после этого нежелательный проникающий сигнал постоянной составляющей от смесителя 60 подавляется блоками вычитания 212 и 214.
Контур 230 подавления проникающих сигналов постоянной составляющей также дает гарантию, что мощность модулирующих сигналов, подаваемая на АЦП 86 и 88, а значит и на детектор 154 ПУПС, является показателем мощности сигнала, принятого на самом деле, и не разрушается чужеродными проникающими сигналами постоянной составляющей.
В указанном варианте осуществления изобретения может потребоваться модификация вышеуказанного способа подавления проникающих сигналов постоянной составляющей, чтобы адаптироваться к приему принимаемых ЧМ-сигналов, соответствующих "многотональным" аналоговым сигналам. В частности, в определенных приложениях принятый ЧМ-сигнал может быть представлен в виде "многотонального" сигнала, состоящего из группы стационарных, т.е. имеющих фиксированную частоту, составляющих ЧМ-сигнала, в которой каждая стационарная составляющая соответствует амплитуде или шагу конкретного аналогового тона. Это может потребовать преобразования низкочастотных интермодуляционных составляющих. Поэтому, если гетеродин генератора 64 вносит статическое смещение частоты, то возможно преобразование конкретных интермодуляционных составляющих в смесителе 60 в модулирующую постоянную составляющую, т.е. преобразование к той же модулирующей частоте, на которой может присутствовать проникающий сигнал постоянной составляющей. В этом случае может оказаться затруднительным выявление различия между нежелательным прониканием постоянной составляющей и информацией, заключенной в полезном сигнале, преобразованной смесителем 60 в модулирующую постоянную составляющую. Поскольку контуры 200 и 230 подавления проникающих сигналов постоянной составляющей, как правило, предназначены для исключения по существу всей энергии сигнала постоянной составляющей, генерируемого смесителем 60, возможно исключение и полезной интермодуляционной информации наряду с нежелательными проникающими сигналами постоянной составляющей.
В соответствии с другим аспектом изобретения это затруднение преодолевается путем использования модулятора 260 смещения гетеродина, предназначенного для внесения изменяющегося во времени отклонения в смещение постоянной составляющей, приложенной на номинальной частоте гетеродина. Термин "номинальная" частота гетеродина относится к частоте, на которой принятая средняя несущая частота преобразуется в частоту модулирующей постоянной составляющей с помощью смесителя 60. Поскольку в этом случае частота смещения постоянной составляющей, подаваемая на смеситель 60, не статична, а изменяется в заданном диапазоне, принимаемые стационарные составляющие не будут непрерывно преобразовываться в модулирующую постоянную составляющую, а вместо этого будут преобразовываться в модулирующие частоты на основании отклонения смещения гетеродина. Поэтому полезные низкочастотные интермодуляционные составляющие можно отличить от нежелательного проникания постоянной составляющей, так как проникающий сигнал постоянной составляющей остается на уровне модулирующей постоянной составляющей, вне зависимости от отклонения смещения частоты, приложенной к сигналу гетеродина. Поэтому модулятор 260 смещения позволяет контуру подавления сигналов смещения постоянной составляющей исключать нежелательные сигналы смещения постоянной составляющей, сохраняя при этом определенную информацию стационарного сигнала.
Смещение модулированной частоты, вносимое в номинальную частоту гетеродина, можно характеризовать в терминах: средняя частота смещения, минимальная и максимальная частота смещения и частота модуляции смещения, т.е. скорости, с которой варьируется смещение между минимальными и максимальными частотами смещения. Например, в конкретном варианте среднее смещение частоты выбирают равным 100 Гц, минимальное и максимальное смещения выбирают равными 50 Гц и 150 Гц, а частоту модуляции смещения устанавливают равной 10 Гц.
Если использовать указанный вариант для построения ЧМ ЧМн- или ГММн-приемника, то выход АЦП 86 и 88 подключают к ЧМ-демодулятору (не показан). Модулирующий сигнал, вносимый демодулятором 260 смещения гетеродина (в предпочтительном варианте 10 Гц), можно легко исключить после ЧМ-демодуляции с помощью цифрового фильтра верхних частот с частотой среза, которая несколько выше частоты максимального смещения модуляторов 260 смещения гетеродина, без негативного влияния на качество звука.
Вышеизложенное описание предпочтительных вариантов осуществления изобретения позволяет любому специалисту в данной области техники реализовать или использовать настоящее изобретение. Различные модификации, которые можно внести в эти варианты, совершенно очевидны для специалистов в данной области техники, а раскрытые здесь основные принципы можно применить к другим вариантам без дополнительного изобретательства. Таким образом, настоящее изобретение не ограничивается раскрытыми в описании вариантами его осуществления.
Предложены способ автоматической регулировки усиления (АРУ) и коррекции смещения постоянной составляющей и устройство регулировки мощности сигнала в двухрежимном приемнике с квадратурной демодуляцией. Устройство АРУ включает усилитель 18 с регулируемым коэффициентом усиления. Понижающий преобразователь 20 с квадратурной демодуляцией, подключенный к усилителю 18, служит для перевода частоты выходного сигнала в модулирующую частоту. Два активных фильтра нижних частот 76 и 78 с высоким коэффициентом усиления обеспечивают подавление внедиапазонного сигнала в диапазоне модулирующих сигналов. Контур подавления проникающих сигналов постоянной составляющей подавляет проникающие сигналы смещения постоянной составляющей, генерируемые понижающим преобразователем 20 и фильтрами 76 и 78 нижних частот. Устройство АРУ также генерирует принятый сигнал мощности на основании мощности выходного сигнала. Насыщающий интегратор 22 сравнивает принятый сигнал мощности с эталонным сигналом и генерирует сигнал регулировки усиления путем интегрирования или воздержания от интегрирования на основании величин опорного сигнала, принятого сигнала мощности и сигнала регулировки усиления. Технический результат: снижение потери информации на частоте несущей. 2 с. и 7 з.п.ф-лы, 10 ил.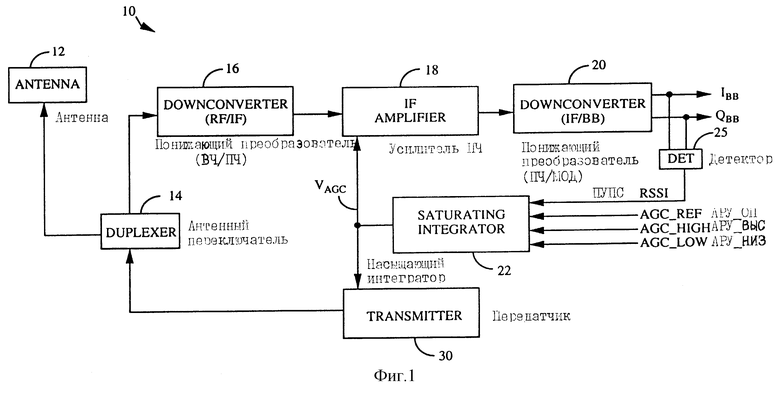
| US 4653117, 24.03.1987 | |||
| Способ передачи и приема аналоговых сигналов и устройство для его осуществления | 1989 |
|
SU1693726A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ ПО ШУМАМ | 0 |
|
SU374700A1 |
| US 5107225, 21.04.1992 | |||
| US 4944025, 24.07.1990 | |||
| Стенд для исследования рабочих параметров струговых анрегатов | 1973 |
|
SU474615A1 |
| Способ изготовления печатных схем | 1971 |
|
SU482927A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВОДОПРОНИЦАЕМОСТИ МАТЕРИАЛОВ, НАПРИМЕР ОБОЛОЧЕК ШЕЛКОВЫХ КОКОНОВ | 1940 |
|
SU62872A1 |
