Изобретение относится к области неразрушающего контроля материалов и изделий и может быть использовано для неразрушающего контроля многослойных изделий из металлов пластиков и их комбинаций, полученных методами диффузионной сварки, пайки, склеивания и др. Оно предназначено для обнаружения локальных дефектов соединения отдельных слоев и использует ударно-акустический метод контроля, заключающийся в нанесении ударов по контролируемому изделию и анализу реакции изделия на ударные импульсы.
Известны дефектоскопы, реализующие ударно-акустический метод: АД-20УП, АД-50У, АД-60С и другие [1-4], в которых используются первичные преобразователи, состоящие из электромагнитной ударной системы и пьезоэлектрической приемной системы, выполненной в виде металлического щупа с пьезопреобразователем, находящегося в постоянном механическом контакте с поверхностью контролируемого изделия и являющегося приемником возбуждаемых в нем упругих колебаний (АД-20УП, АД-50У). В дефектоскопе АД-60С приемником возбуждаемых в изделии при ударах упругих колебаний является микрофон, расположенный вблизи зоны удара и воспринимающий колебания поверхности контролируемого изделия через воздух.
Основными недостатками указанных дефектоскопов, обусловленными несовершенством используемых первичных преобразователей, является недостаточная чувствительность, воспроизводимость и локальность контроля, а также высокий уровень генерируемого акустического шума, утомляющий оператора.
Причинами этих недостатков являются
- наличие определенного расстояния между точкой удара и точкой съема упругих колебаний, возбуждаемых в изделии при ударе. В первичных преобразователях с приемником в виде щупа это расстояние соответствует 7-10 мм, ввиду чего и границы дефектной зоны не могут быть определены с более высокой точностью, а дефекты диаметром менее 10-15 мм вообще не обнаруживаются. В первичном преобразователе с приемником в виде микрофона точка съема информационного сигнала вообще не локализована. Микрофон воспринимает акустический сигнал, возбуждаемый всей поверхностью изделия (а также и вибрирующими элементами конструкции ударной системы, что создает весьма существенный сигнал помехи, ухудшающий воспроизводимость результатов контроля). В результате, локальность контроля при использовании первичных преобразователей с приемником колебаний в виде микрофона еще хуже;
- значительная масса ударника, что создает высокий уровень акустического шума и может приводить к повреждению поверхности контролируемого изделия, если его верхним слоем является пластик;
- амплитудно-частотная характеристика приемника колебаний в виде щупа с пьезопреобразователем имеет принципиально неустранимые экстремумы (максимум и минимум, вызванные последовательным и параллельным резонансами в акустическом тракте приемника) в рабочей области частот, что затрудняет его использование в спектральных дефектоскопах.
Техническими задачами, на решение которых направлено предлагаемое изобретение, являются повышение чувствительности, локальности и воспроизводимости (достоверности) контроля, основанного на применении ударно-акустического метода, а также существенное снижение уровня возбуждаемого при контроле акустического шума и исключение возможности повреждения поверхности контролируемого изделия.
Решение указанных задач достигается тем, что ударная и приемная системы геометрически совмещены путем введения тела - "посредника", выполненного в виде шарика с сошлифованным верхним сегментом, через который передается ударный импульс от ударника в контролируемое изделие и воспринимаются возбуждаемые в изделии упругие колебания, причем ударник выполнен в виде тонкой тупой иглы, неударный конец которой жестко запрессован в плунжер электромагнита, а тело - "посредник" (шарик) впаяно в центр мембраны из ферромагнитного материала, являющегося чувствительным элементом магнитноиндукционной приемной системы.
Сущность изобретения поясняется чертежом, на котором представлен схематический чертеж предлагаемого первичного преобразователя.
Ударная система первичного преобразователя состоит из ударника 1, выполненного в виде тонкой иглы, ударный конец которой затуплен, а противоположный конец жестко запрессован в ферромагнитный плунжер 2 электромагнита броневого типа, в магнитопроводе 3 которого имеется осевой канал, в котором может свободно перемещаться ударник 1. Магнитопровод 3 состоит из нижней и верхней частей, свинчиваемых друг с другом. Нижняя часть магнитопровода имеет удлиненный хвостовик с наружной. Верхняя часть имеет в крышке отверстие, в котором может свободно перемещаться плунжер 2. В полости магнитопровода 3 расположена катушка 4 электромагнита, питаемая короткими прямоугольными импульсами напряжения. Плунжер 2 в состоянии покоя удерживается конической пружиной 5 таким образом, что между нижним торцом плунжера и верхним торцом центральной части магнитопровода 3 остается начальный зазор δ0, превышающий зазор δ1 между ударным концом ударника и верхней плоскостью тела - "посредника" 6, в качестве которого используется стальной шарик с сошлифованным верхним сегментом для получения плоской площадки, по которой наносятся удары. Шарик впаян в центр упругой мембраны 7, прижимающей шарик к поверхности контролируемого изделия и одновременно выполняющей роль чувствительного элемента индукционного преобразователя механических колебаний, возбуждаемых в изделии, в электрические, для чего мембрана выполняется из ферромагнитного материала. Верхняя часть магнитопровода 3 электромагнита имеет наружную резьбу, на которую навинчивается пластмассовая крышка 8. Под крышкой помещается шайба 9 из звукогасящего материала (плотная резина), а на дно крышки укладывается демпфер 10, выполненный из пористой резины. Зазор между верхним торцом плунжера 2 и нижней поверхностью демпфера 10 определяется высотой шайбы 9.
Приемная система первичного преобразователя, кроме мембраны 7 с впаянным в ее центр шариком 6, включает тороидальный постоянный магнит 11 с полюсами на плоских поверхностях, магнитопровод 12 и измерительную катушку 14. Магнитопровод 13 имеет центральное отверстие с резьбой, в которое ввинчивается хвостовик магнитопровода 3. Его наружная цилиндрическая часть также снабжена резьбой, на которую сверху навинчивается пластмассовый корпус 14, а снизу - металлическая установочная платформа 15, имеющая снизу кольцевой выступ, прижимающий мембрану 7 к нижнему торцу магнитопровода 12 приемной системы. Платформа 15 имеет снизу два выступа 16, образующие вместе с шариком 6 трехногую опору на поверхность контролируемого изделия 17. В верхней части корпуса 14 имеется отверстие для соединительного кабеля, а также два отверстия для сигнальных светодиодов (желтого и красного), которые на чертеже не показаны.
Первичный преобразователь работает следующим образом. Платформа 15 устанавливается на поверхность контролируемого изделия 17 и вручную или с помощью механической сканирующей системы перемещается по ней. На катушку 4 электромагнита периодически (с частотой до нескольких десятков герц) подаются короткие импульсы напряжения (длительность импульсов подбирается такой, чтобы импульс тока в катушке заканчивался к моменту подлета ударника к шарику 6, что необходимо для устранения эффекта дребезга, который может возникнуть, если к моменту окончания удара электромагнитный импульс еще не закончится и заставляет отскочивший ударник вновь ударять по шарику). Под действием электромагнитного импульса плунжер 2 втягивается в магнитопровод 3 электромагнита, и ударник наносит удар по верхней площадке шарика 6, являющегося телом - "посредником". Через него ударная волна достигает поверхности контролируемого изделия и проникает в его глубину. Длительность и форма ударных импульсов, возбуждаемых в контролируемом изделии, зависит как от свойств ударной системы (которые в процессе контроля остаются неизменными), так и от свойств контролируемого изделия и, в частности, от наличия подповерхностных дефектов в зоне удара. Кроме того, под действием ударного импульса в локальной зоне контролируемого изделия возникают свободные постепенно затухающие колебания, параметры которых также зависят от свойств изделия в зоне удара. Поскольку шарик 6 остается прижатым к поверхности контролируемого изделия и после окончания ударного импульса, он воспринимает колебания поверхности изделия и передает их мембране 7. Через мембрану 7 проходит магнитный поток от постоянного магнита, который охватывает витки измерительной катушки 13. При колебаниях мембраны воздушный зазор между постоянным магнитом и мембраной будет изменяться и модулировать величину магнитного потока, вследствие чего в измерительной катушке будет индуцироваться ЭДС, поступающая в электронный блок дефектоскопа, где усиливается и анализируется спектральным или любым другим методом. При прохождении первичного преобразователя над дефектной зоной параметры ударного импульса и возбуждаемых в изделии свободных упругих колебаний изменяются, а следовательно будут меняться и характеристики сигнала, снимаемого с измерительной катушки 13 первичного преобразователя, что и фиксируется анализатором электронного блока дефектоскопа. Наличие в первичном преобразователе сигнальных светодиодов облегчает ручное сканирование поверхности контролируемого изделия. Желтый светодиод загорается при наличии неопасных дефектов, красный - при опасных. Светодиоды управляются анализатором электронного блока. При попадании на дефектную зону ручное сканирование можно приостановить и исследовать эту зону более детально с помощью индикационного устройства самого электронного блока, которое должно давать более детальную информацию об обнаруженном дефекте.
Геометрическое совмещение точки удара и точки съема упругих колебаний, возбуждаемых в изделии при ударах, путем использования тела - "посредника" в виде шарика, впаянного в центр упругой мембраны, существенно повышают чувствительность преобразователя к дефектам с малой эффективной площадью и увеличивают локальность контроля (точность определения границ дефектной зоны) до 0,5 - 1,0 мм (в зависимости от глубины залегания дефекта).
Использование ударника в виде тонкой иглы с плунжером позволяет существенно снизить его массу, а значит и энергию ударов, что исключает возможность повреждения поверхности контролируемого изделия при контроле, резко снижает уровень акустического шума при работе преобразователя (что улучшает условия труда оператора) и создает предпосылки для повышения частоты ударов (за счет снижения инерционности ударника), а значит и производительности контроля.
Использование магнитоиндукционной приемной системы с чувствительным элементом в виде круглой мембраны путем соответствующего подбора ее параметров позволяет получить практически равномерную амплитудно-частотную характеристику приемной системы (относительно амплитуды колебательной скорости) во всем рабочем частотном диапазоне (от 500 до 20000 Гц), что весьма важно при использовании спектральных методов анализа сигнала.
Слабая чувствительность преобразователя к мешающим факторам (паразитные колебания элементов конструкции ударной и приемной систем преобразователя и внешние акустические шумы) и высокая стабильность параметров преобразователя обеспечивает высокую воспроизводимость и достоверность контроля.
Экспериментальные исследования, проведенные на макетном образце описанного первичного преобразователя с использованием образцов многослойных изделий с искусственными дефектами подтвердили высокую чувствительность, локальность и достоверность контроля с использованием данного первичного преобразователя. Чувствительность к малым дефектам (по их эффективной площади) по сравнению с преобразователем серийного дефектоскопа АД-50У повысилась более чем на порядок, а локальность контроля (точность определения границ дефектной зоны) с 10 -15 мм у дефектоскопа АД-50У до 0,5-1,0 мм у данного преобразователя (и в том, и в другом случае локальность контроля зависит от глубины залегания дефектов).
Не менее чем на порядок повысилось и отношение значений выходного сигнала анализатора при перемещении первичного преобразователя с бездефектной зоны изделия на дефектную (при этом, естественно, использовался один и тот же образец с искусственным дефектом). Это говорит о соответствующем повышении достоверности контроля. Таким образом, экспериментальные исследования подтвердили, что все поставленные технические задачи успешно решены.
Литература
1. Ланге Ю.В. Акустический спектральный метод неразрушающего контроля. - Дефектоскопия, 1978, N 3, с.7-14.
2. Ланге Ю. В., Устинов Е.Г. Авт. свид. N 557318. Бюлл. изобр. 1977, N 17.
3. Ланге Ю.В., Устинов Е.Г. Акустический спектральный дефектоскоп. - Дефектоскопия, 1978, N 4, с.27-33.
4. Ланге Ю. В. , Устинов Е.Г. Низкочастотный акустический дефектоскоп АД-60С. - Дефектоскопия, 1982, N 1, с.12-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНО-АКУСТИЧЕСКИЙ ДЕФЕКТОСКОП | 1998 |
|
RU2167419C2 |
| СПОСОБ ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МНОГОСЛОЙНЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2168722C2 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455636C1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ТОНКОСТЕННЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2117940C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 2001 |
|
RU2213336C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| УСТРОЙСТВО ДЛЯ УДАРНОЙ ДЕФЕКТОСКОПИИ МАТЕРИАЛОВ | 2009 |
|
RU2402014C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ | 1995 |
|
RU2085935C1 |
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗДЕЛИЙ | 2015 |
|
RU2616758C1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 2003 |
|
RU2247370C1 |
Изобретение относится к области неразрушающего контроля материалов и изделий и может быть использовано для неразрушающего контроля многослойных изделий из металлов, пластиков и их комбинаций. Повышение чувствительности, локальности и достоверности контроля, снижение уровня возбуждаемого при контроле акустического шума и исключение возможности повреждения поверхности контролируемого изделия достигается за счет того, что первичный преобразователь ударно-акустического дефектоскопа содержит ударную систему электромагнитного типа и приемную систему упругих колебаний магнитоиндукционного типа. Причем ударная и приемная системы геометрически совмещены путем введения тела-"посредника", выполненного в виде шарика с сошлифованным верхним сегментом, который служит для передачи ударного импульса от ударника в контролируемое изделие и восприятия возбуждаемых в изделии упругих колебаний. Ударник выполнен в виде тонкой тупой иглы, неударный конец которой жестко запрессован в плунжер электромагнита, а тело-"посредник" (шарик) впаяно в центр мембраны из ферромагнитного материала, являющейся чувствительным элементом магнитоиндукционной приемной системы. 1 ил.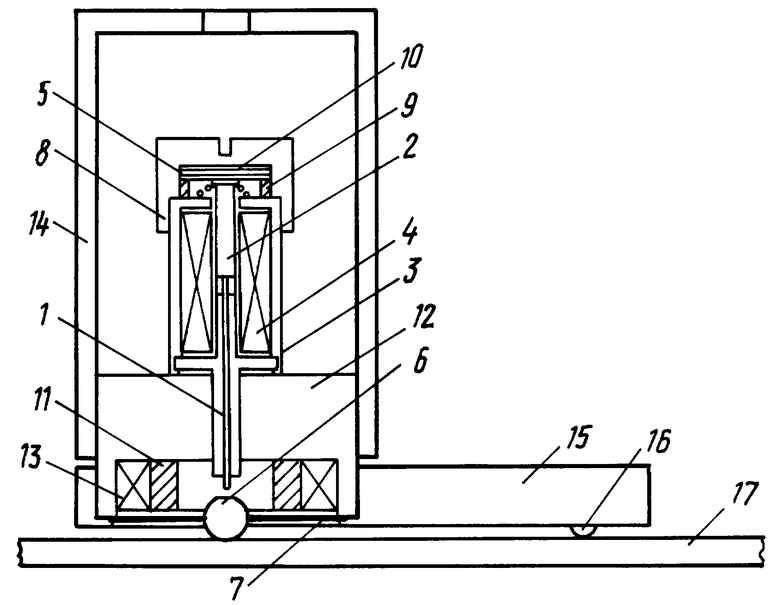
Первичный преобразователь ударно-акустического дефектоскопа, содержащий ударную систему электромагнитного типа и приемную систему упругих колебаний магнитоиндукционного типа, отличающийся тем, что ударная и приемная системы геометрически совмещены путем введения тела - "посредника", выполненного в виде шарика с сошлифованным верхним сегментом, который служит для передачи ударного импульса от ударника в контролируемое изделие и восприятия возбуждаемых в изделии упругих колебаний, причем ударник выполнен в виде тонкой тупой иглы, неударный конец которой жестко запрессован в плунжер электромагнита, а тело - "посредник" (шарик) впаяно в центр мембраны из ферромагнитного материала, являющейся чувствительным элементом магнитоиндукционной приемной системы.
| ЛАНГЕ Ю.В., УСТИНОВ У.Г | |||
| Акустический спектральный дефектоскоп | |||
| Дефектоскопия | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| US 4312231, 26.01.1982 | |||
| US 442714, 17.04.1984 | |||
| Акустический приемный преобразователь | 1984 |
|
SU1228009A1 |
| Акустический приемный преобразователь | 1989 |
|
SU1698749A1 |
| Акустический преобразователь | 1989 |
|
SU1670593A1 |
