Изобретение относится к заготовке древесины сортиментами и может использоваться в лесной промышленности.
Известен способ машинной заготовки древесины, включающий следующую последовательность операций-этапов:
1. Валка
2. Трелевка
3. Обрезка сучьев
4. Раскряжевка
(см. книгу: В.Г.Кочегаров, Ю.А.Бит, В.И.Меньшиков "Технология и машины лесосечных работ", Лесная пром-сть, Москва, 1990 г., с. 18-25). Недостатком этого способа является необходимость в комплексе специализированных машин, осуществляющих каждая свою технологическую операцию. Основной недостаток: высокая энергонасыщенность машин, значительная масса, обусловленная спецификой реализации технологической операции, состоящей в перемещении дерева относительно машины. Так, например, при осуществлении валки леса ЛП-19, либо другой аналогичной машиной, осуществляется укладка в пакет с подъемом и перемещением всей биомассы дерева относительно самой машины. Поэтому в рассматриваемом случае необходима значительная масса машины, позволяющая обеспечить устойчивость машины, а это приводит к необходимости иметь мощную энергосиловую установку. Масса машины также объясняется расстоянием от машины до дерева, над которым совершается технологическая операция. Аналогичные недостатки присущи и другим операциям: трелевке, обрезке сучьев, раскряжевке.
Известно устройство, работа которого обеспечивается следующей последовательностью этапов:
1. Валка
2. Обрезка сучьев
3. Раскряжевка
4. Трелевка-вывозка сортиментов
Эти операции осуществляются многофункциональным рабочим органом, прикрепленным к манипулятору какой-либо машины, и известны под названием "харвестер".
В данном способе недостатки, присущие вышеописанному способу, частично решены. Валка осуществляется без подъема массы древесины, что значительно облегчает манипулятор и саму машину. А такие операции, как обрезка сучьев и раскряжевка, производятся путем перемещения массы дерева относительно машины. Это обстоятельство объясняет необходимость присущего харвестеру массы машины, так же она объяснима необходимостью перемещения и наведения рабочего органа с помощью манипулятора на дерево.
Известно устройство, многооперационная машина харвестер Локомо 919/750, состоящая из машины, манипулятора с прикрепленным к ней рабочим органом. Недостаток машины - значительная масса, необходимая для сохранения устойчивости при технологических перемещениях дерева и наведения рабочего органа на дерево при значительном вылете манипулятора. (см. Можаев Д.В., Илюшкин С.Н. Механизация лесозаготовок за рубежом М.: Лесная пром-сть 1988 г., с.236).
Наиболее близким устройством является многооперационная машина Макери 34Т, состоящая из машины, короткой стрелы с прикрепленным к ней рабочим органом, состоящим из сучкорезных ножей, пильного механизма, протяжных вальцов. Недостатки, присущие Локомо 919/750, частично решены, машина имеет короткую стрелу, она подъезжает непосредственно к дереву, поэтому масса машины меньше Локомо 919/750, но остальные операции осуществляются перемещением дерева относительно машины, в связи с этим необходима значительная остаточная масса, являющаяся ее недостатком.
Технический результат - снижение удельных материальных и энергетических затрат при заготовке древесины. Этот результат достигается тем, что колеса установлены на машине с возможностью трансформации и одновременно могут использоваться в качестве средства передвижения как по земле, так и по стволу дерева, машина имеет вес меньший средней массы дерева, обусловленной компактным размещением конструктивных элементов и дистанционной системой управления. Устройство для выполнения этой последовательности операций содержит раму, гидроаппаратуру, две пары колес, которые могут быть охвачены попарно гусеничной лентой, захватно-срезающее устройство (ЗСУ) с сучкорезными ножами и пильным механизмом, стрелу, двигатели, блок приема и управления.
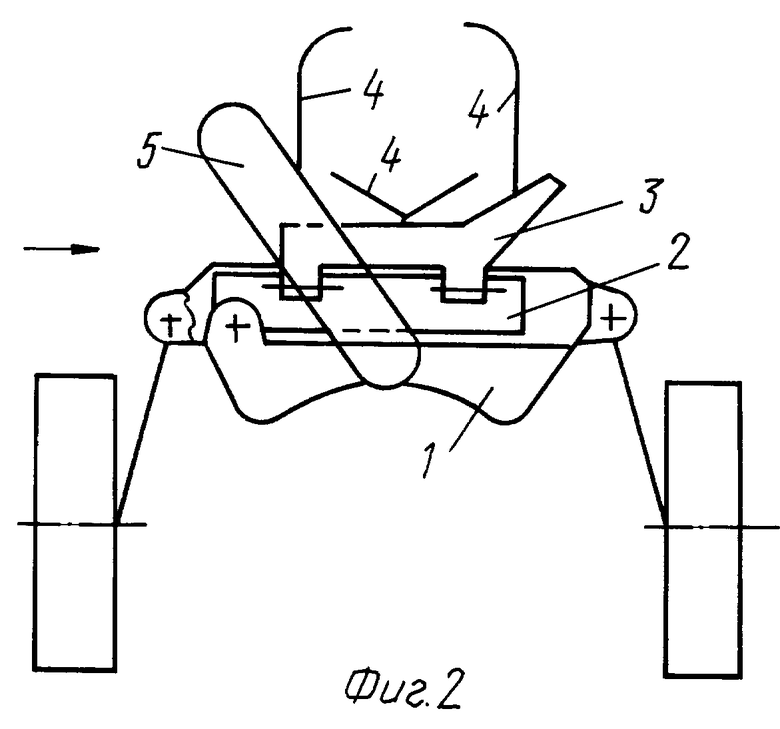
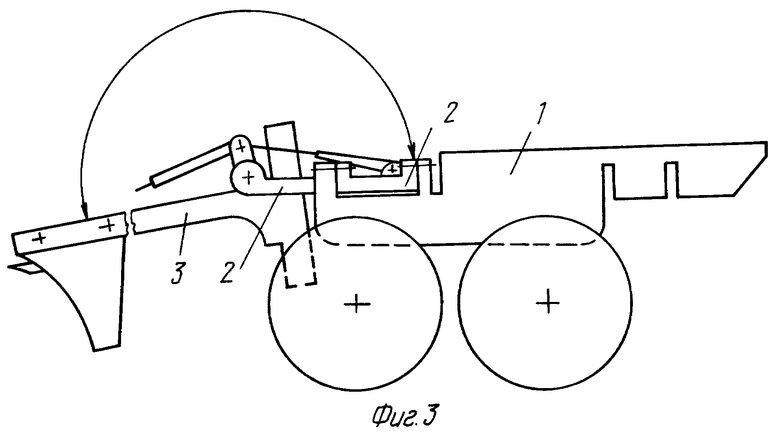
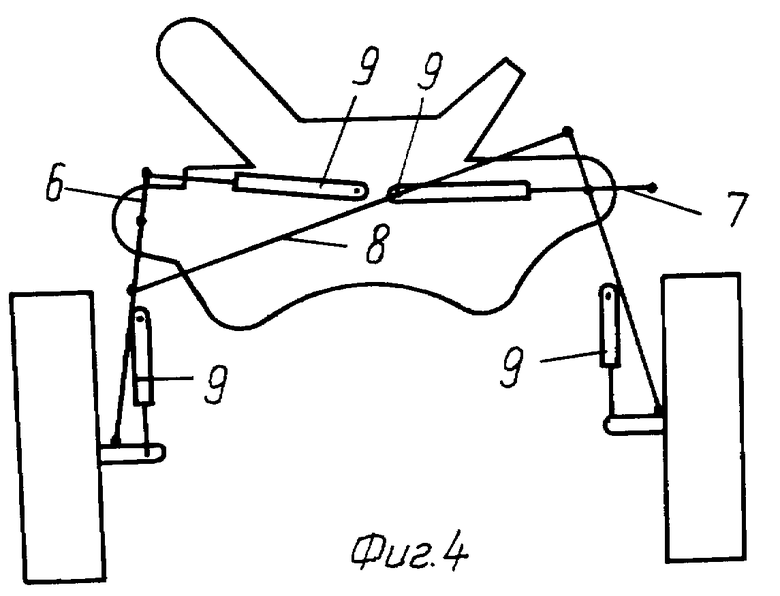
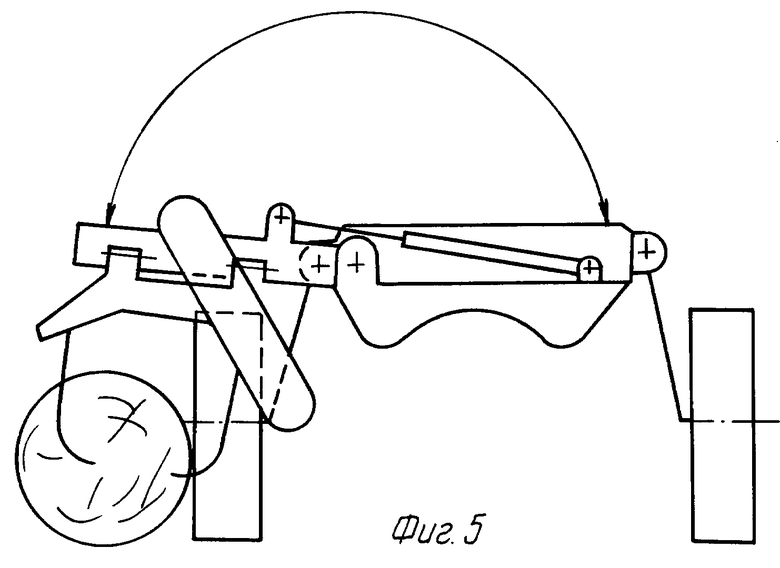
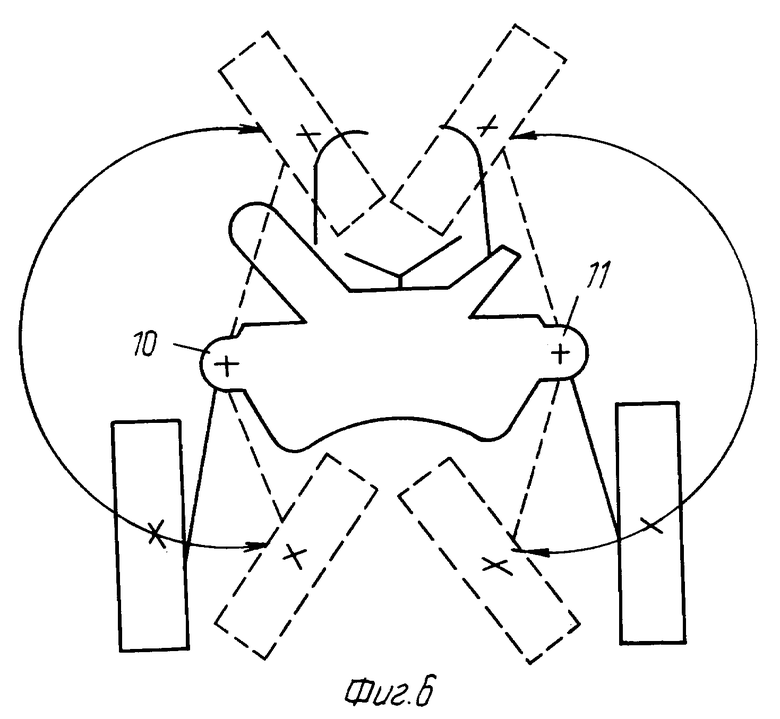
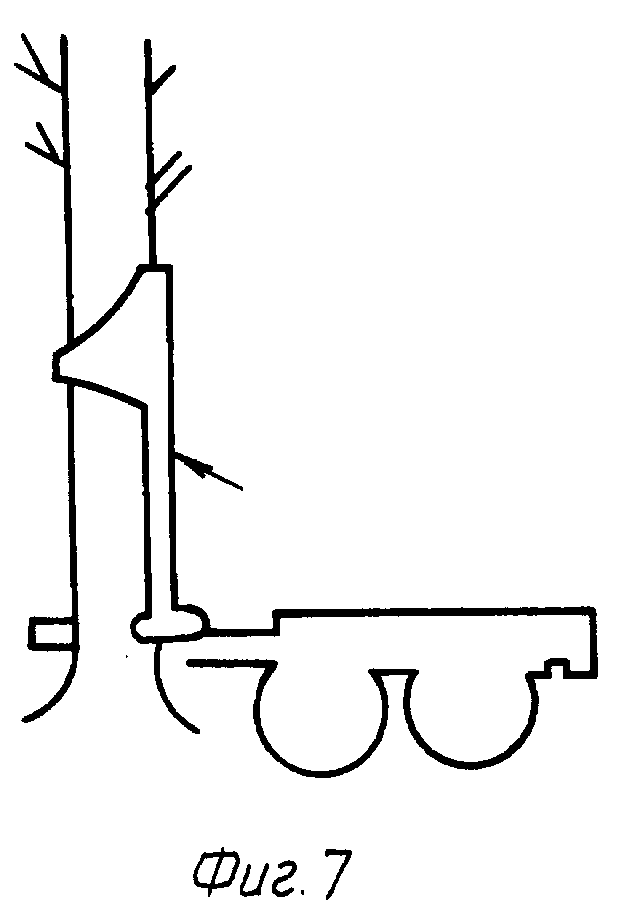
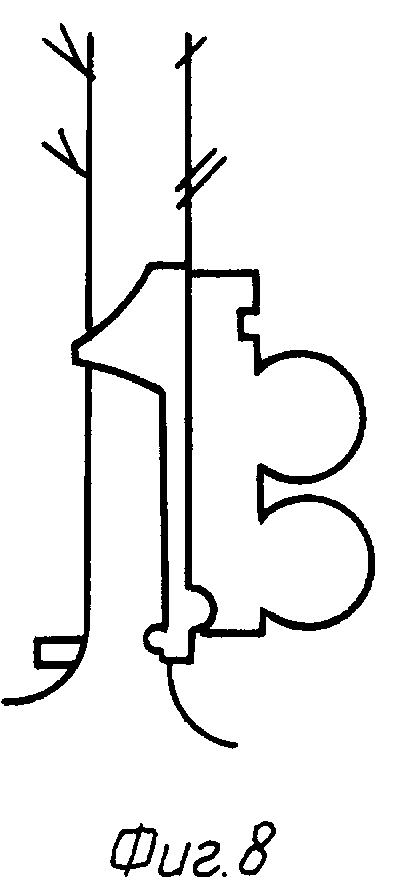
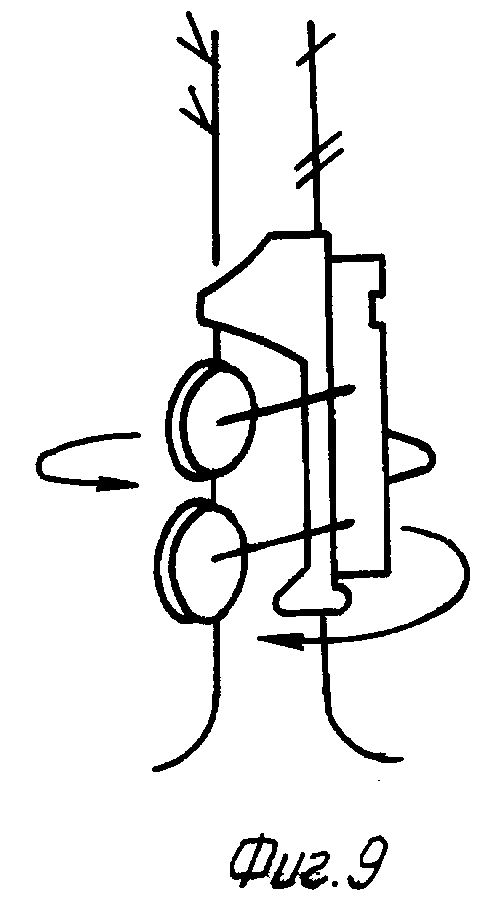
На фиг. 1 изображено устройство для заготовки древесины, общий вид; на фиг. 2 - вид по А на фиг. 1, по направлению движения; на фиг. 3 - перемещение ЗСУ относительно машины; на фиг. 4 - расположение и кинематическая связь механизма трансформации колес; на фиг. 5 - расположение и кинематика движения стрелы относительно машины и захвата лежащего дерева; на фиг. 6 - кинематика трансформации колес, на фиг. 7-15- последовательность и кинематика выполнения технологических операций.
Способ заготовки древесины заключается в следующем: машина подъезжает к дереву, поднимает ЗСУ и захватывает сучкорезными ножами ствол дерева, впоследствии используя гидроцилиндр подъема ЗСУ, подтягивает саму машину к дереву и обхватывает путем поворота кронштейнов, соединяющих колеса с рамой ствол дерева колесами, в дальнейшем машина перемещается по стволу, используя привод колес, вверх, выполняя первую операцию - обрезку сучьев, опускаясь вниз, она отрезает сортименты, начиная с вершины необходимой длины, выполняя операцию раскряжевки и опустившись вниз, производит обрезание и повал оставшейся части дерева, выполняя операцию валки с возможной по необходимости в дальнейшем транспортной операции по транспортировке сортимента.
Устройство для реализации этого способа содержит раму-гидробак 1 (фиг. 1-3), в котором размещены элементы гидроаппаратуры (распределители, насосы, трубопроводы, клапана, гидрожидкость и др.), к которому через стрелу 2, шарнирно прикрепленную к раме посредством проушин и гидроцилиндра (аналогичным образом крепится ЗСУ 3 к стреле), крепится ЗСУ, содержащее сучкорезные ножи 4, одновременно выполняющие роль крюков захвата, и пильный механизм 5, к раме так же крепится с помощью кронштейнов колеса, имеющие гидропривод (изображены в транспортном положении), которые с помощью гидроцилиндров фиг. 4 через плечи 6, 7, расположенные взаимно перпендикулярно, что исключает мертвое положение, и тяги 8, обеспечивающей синхронность движения колесных пар, а также гидроцилиндров 9, переводятся в положение обрезки сучьев на осях 10, 11 (фиг. 8), далее на фиг. 1 обозначена энергосиловая установка 12, возможно, в виде двух или более двигателей и блок управления 13, осуществляющий прием радиосигналов дистанционного управления и преобразование в электрические сигналы управления положением золотников гидрораспределителя и др. , так же машина содержит автономный пульт дистанционного управления, используемый оператором для управления машиной на расстоянии.
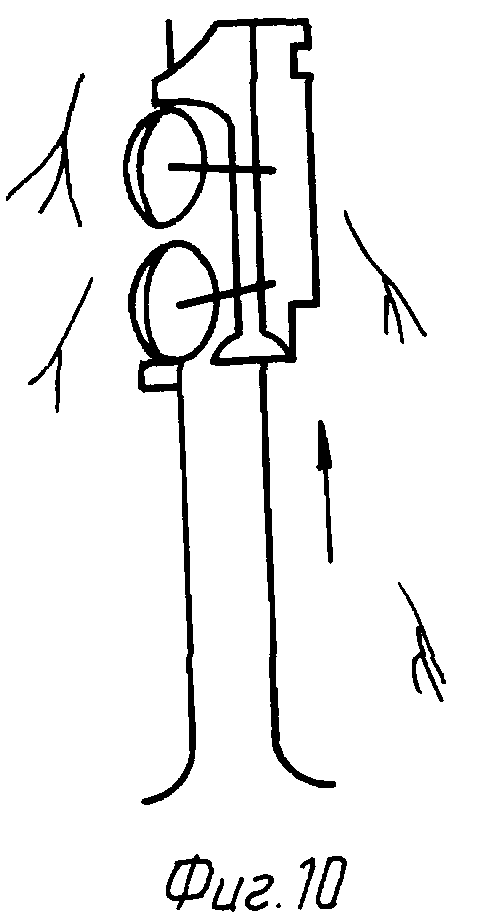
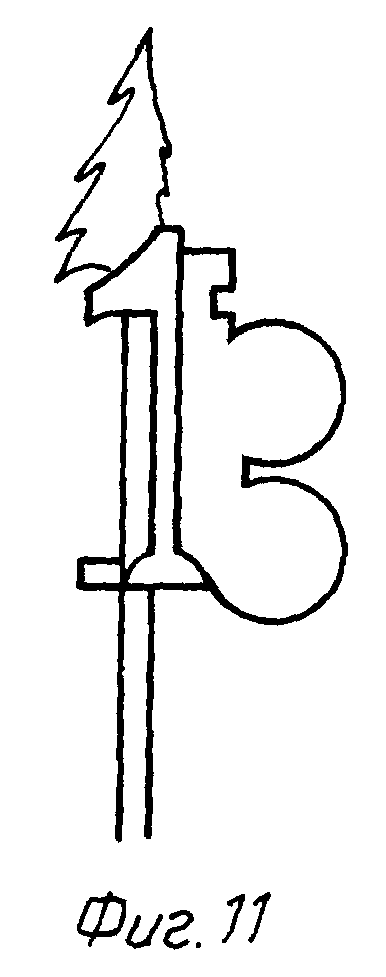
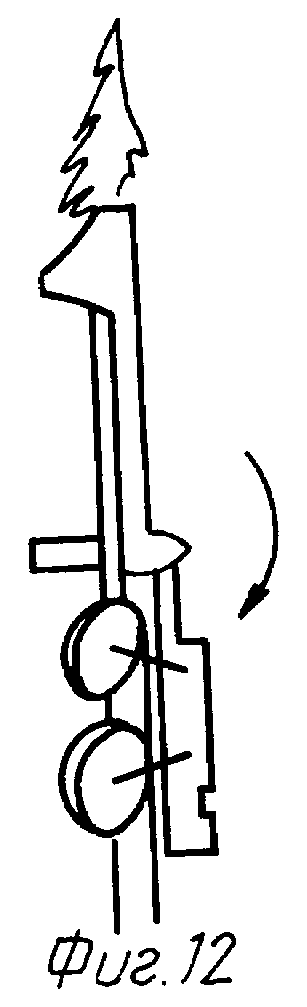
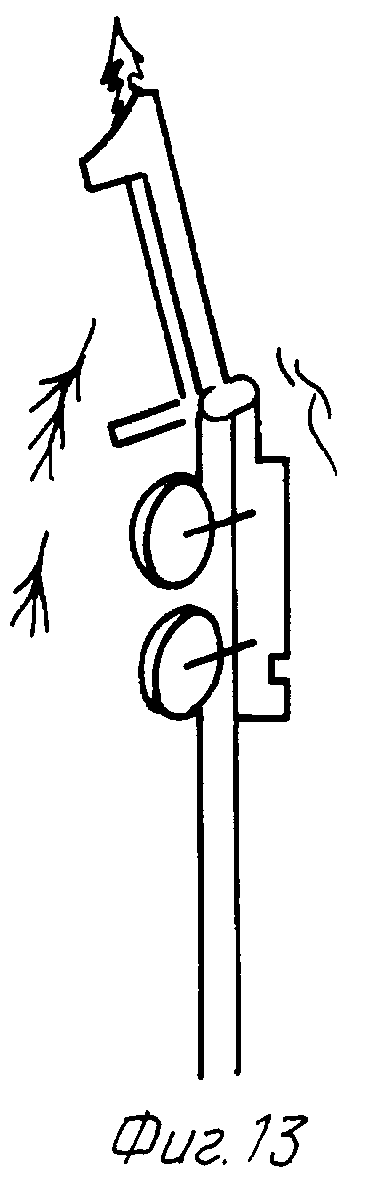
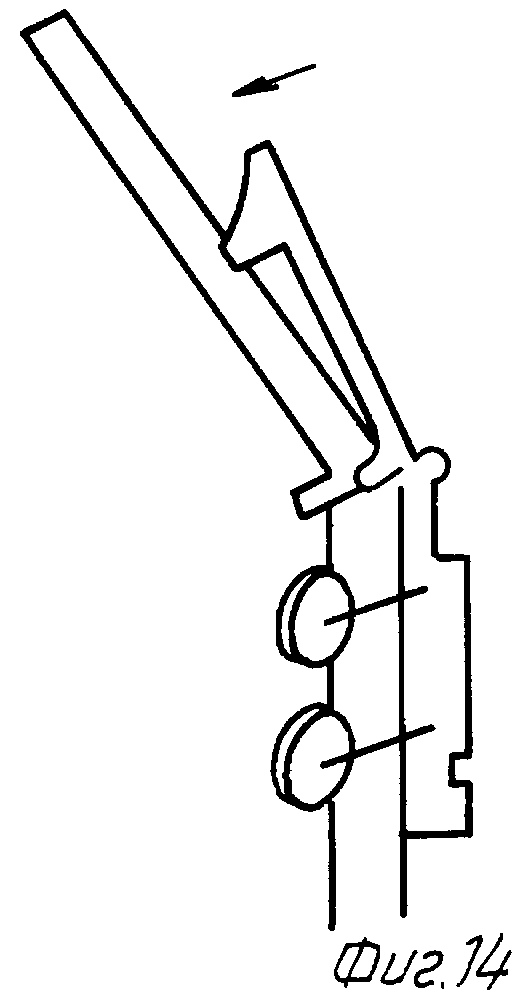
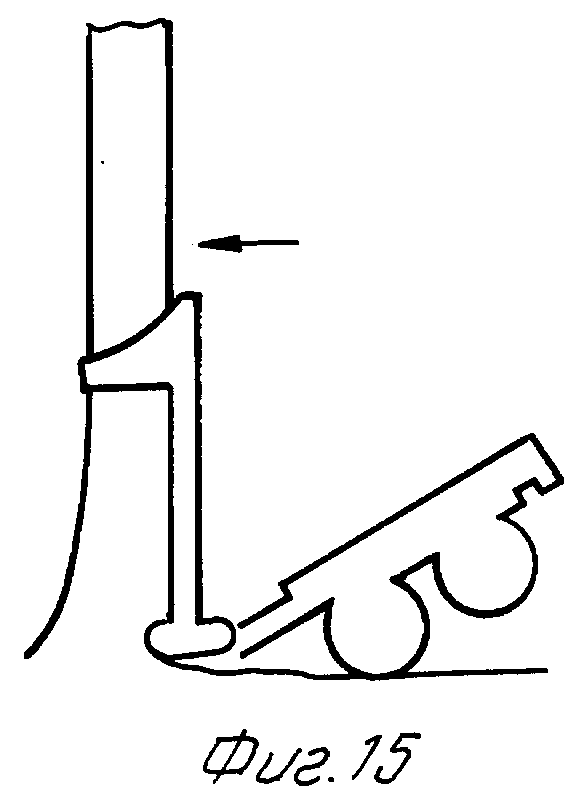
Выполнение технологических операций происходит следующим образом: машина подъезжает к дереву, поднимает ЗСУ и прислоняет к дереву, обхватывая сучкорезными ножами ствол фиг. 7, в дальнейшем подтягивает саму машину к стволу дерева фиг. 8 и обхватывает ствол дерева колесами фиг. 9 и движется по стволу дерева вверх, используя привод колес, которые в данной операции выполняют функцию протяжных вальцов фиг. 10. Почти достигнув вершины, колеса переводятся в транспортное положение фиг. 11, а в дальнейшем сама машина отходит от ЗСУ на оси вращения на 180o и обхватывает дерево с другой стороны машины фиг. 12. В дальнейшем происходит дорезание оставшихся сучьев на необходимую длину и с учетом кратности и длины сортимента производится спиливание вершины дерева с направленным повалом, фиг. 13. После этого, опустившись на длину сортимента, происходит срезание сортимента и сталкивание его ЗСУ, фиг. 14, срезание других последующих сортиментов происходит аналогично, кроме последнего. Последняя операция - валка - осуществляется спиливанием и повалом оставшейся части дерева с упором самой машины о землю, фиг. 15.
При осуществлении заготовок древесины, предлагаемой машиной, рубок главного пользования, транспортные операции целесообразнее осуществлять форвадером. При рубках прореживания, осветления, умеренно-постепенных рубках и других, когда производится выборочная валка отдельных деревьев, встает вопрос транспортно-трелевочной операции с пасеки леса. В этих случаях машина способна осуществить трелевочные операции сортиментов даже в стесненных условиях леса.
Транспортные операции осуществляются следующим образом. Машина подъезжает к лежащему сортименту сбоку, ближе к центру тяжести, производит откидывание ЗСУ вместе со стрелой на бок, фиг. 5, производит захват сортимента сучкорезными ножами и взваливает на себя сортимент вместе с ЗСУ путем обратного движения стрелы. В таком положении машина движется к месту складирования сортимента и осуществляет сбрасывание в обратном порядке.
Машина способна производить раскрой лежащих сортиментов, хлыстов на необходимую длину, для этого, загрузившись сортиментом, так же, как при вывозке по фиг. 5 машина переводит колеса из транспортного положения в положение протягивания. При этом ложится рамой на грунт и производит протаскивание сортимента на необходимую длину и производит пропил, разделяя сортимент на необходимые части. При валке деревьев с небольшим объемом хлыста, когда дерево не способно удержать машину, валка осуществляется первой операцией, путем спиливания и сталкивания на землю, в дальнейшем машина подъезжает к комлю этого дерева, загружает на себя, как при вывозке по вышеописанному способу, производит операцию обрезки сучьев и раскряжевку.
Машина способна производить круговое движение вокруг ствола дерева, находясь на нем в положении фиг. 8 (т.е. колеса не обхватывают дерево), используя движение стрелы. На фиг. 5 изображено это движение, но для захвата дерева.
На фиг. 8 машина находится на дереве, удерживаясь сучкорезными ножами, поэтому при движении раскрытия стрелы произойдет не откидывание ЗСУ со стрелой по фиг. 5, а движение самой машины относительно ЗСУ с деревом и стрелы. Если в момент раскрытия стрелы произвести резкое торможение, то за счет сил инерции машина повернется вокруг ствола на некоторый угол, при этом сучкорезные ножи, охватывающие ствол дерева, проскользнут по образующей ствола. Многократно повторяя это движение, можно совершать необходимое круговое движение машины вокруг ствола.
Машина так же способна производить пиление пильным механизмом крупных сучков, которые не прорезаются, сучкорезными ножами. Для этого в положении фиг. 12 необходимо раскрыть сучкорезные ножи, при этом машина удерживается на дереве за счет колес, повернуть ЗСУ на 90o, т.е. стойка ЗСУ была перпендикулярна образующей дерева, в таком положении подняться по стволу к сучку и произвести пропил крупного сучка с выдвижением шины пильного механизма. Если есть несоответствие пильной шины по отношению к сучку, произвести разворот машины вокруг дерева вышеописанным способом. Машину просто оборудовать лебедкой, она позволит производить как чокерную трелевку сортимента, так и с загрузкой на себя позволит преодолевать слабонесущие грунты, глубокие снежные покровы при транспортировке леса с пасеки складирования.
Основное достоинство машины - незначительная мощность энергоустановки и вес к массе дерева. Сопоставим ряд лесозаготовительных машин по их весу к весу дерева. Валочно-пакетирующие машины типа ЛП-19, вес которой равен 24,5 т, осуществляют подъем дерева и его перенос с последующей укладкой в пачку, Локомо 919/750 харвестер сталкивает при валке, не поднимая его, вес его 12,7 т, Макери 34Т осуществляет технологические операции, непосредственно приблизившись к дереву, вес 3,8 т, предлагаемая машина ожидается весом до 150 кг. Если соотнести массу дерева (средний объем хлыста 0,3 м, то ее масса 0,27 т) к массе машины, получим условный коэффициент рентабельности машины. Так, для ЛП-19 этот коэффициент составит 0,01, Локомо 919/750 - 0,02, Макери 34Т - 0,07, предложенной машины - 1,8. В итоге предлагаемая машина по материально-энергетическим затратам в 180 раз рентабельнее ЛП-19, в 90 раз Локомо 919/750, в 26 раз Макери 34Т при соизмеримой производительности.
Машина ожидается высокоэффективной в условиях горных лесов, труднодоступных лесных массивах, т. к. возможна доставка легкими вертолетами, не повреждает почвенной растительности, повысит культуру лесопользования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ ПРИ ЗИМНЕЙ ЗАГОТОВКЕ ЛЕСА | 2023 |
|
RU2815346C1 |
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ В ЗИМНИЙ ПЕРИОД ХАРВЕСТЕРОМ | 2021 |
|
RU2769993C1 |
| ЛЕСНОЙ КОМБАЙН | 2000 |
|
RU2180774C1 |
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ ПРИ ВЫСОКОМ УРОВНЕ СНЕЖНОГО ПОКРОВА | 2021 |
|
RU2768852C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕКИ | 1997 |
|
RU2120736C1 |
| ЛЕСНОЙ КОМБАЙН | 2002 |
|
RU2233073C2 |
| СПОСОБ ЗАГОТОВКИ СОРТИМЕНТОВ МАШИНОЙ МАНИПУЛЯТОРНОГО ТИПА | 2008 |
|
RU2365093C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСНЫХ ТЕРРИТОРИЙ ТРАСС НЕФТЕГАЗОПРОВОДОВ И ЛЭП | 2012 |
|
RU2489844C1 |
| Лесозаготовительная машина | 1991 |
|
SU1813368A1 |
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК СО СМЕШАННЫМИ ХВОЙНО-ЛИСТВЕННЫМИ НАСАЖДЕНИЯМИ, ВКЛЮЧАЮЩИМИ ОСИНОВЫЕ ДЕРЕВЬЯ | 2020 |
|
RU2751006C1 |
Изобретение относится к заготовке древесины сортиментами и может быть использовано в лесной промышленности. Машина устройства для заготовки древесины имеет раму-гидробак с элементами гидроаппаратуры и силовыми установками и автономный пульт дистанционного управления. Колесные пары машины для использования ее в качестве средства передвижения по стволу дерева посредством оси соединены с рамой-гидробаком. Это позволит снизить материальные и энергетические затраты при заготовке древесины. 15 ил.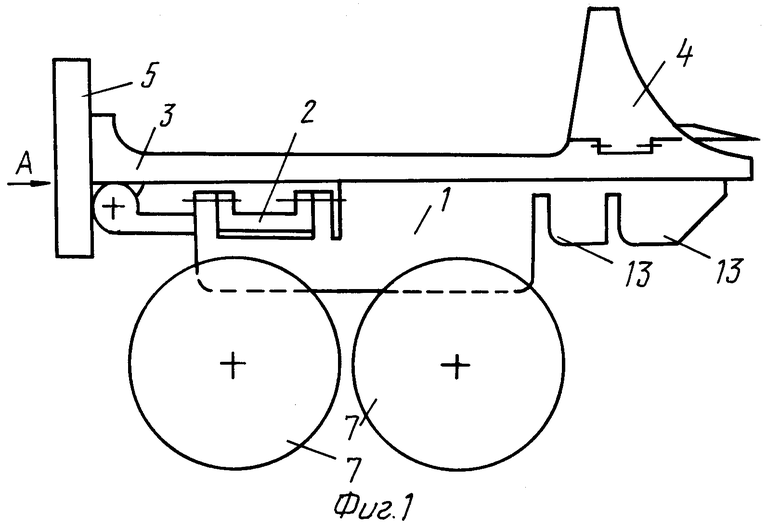
Устройство для заготовки древесины, включающее имеющую колесные пары машину с захватно-срезающим устройством в виде сучкорезных ножей и пильного механизма, отличающееся тем, что машина имеет раму-гидробак с элементами гидроаппаратуры и силовыми установками и автономный пульт дистанционного управления, а колесные пары машины для использования ее в качестве средства передвижения по стволу дерева посредством оси соединены с рамой-гидробаком.
| Можаев Д.В | |||
| и др | |||
| Механизация лесозаготовок за рубежом | |||
| - М.: Лесная промышленность, 1988, с.236 | |||
| ПРОТАСКИВАЮЩИЙ МЕХАНИЗМ ПЕРЕДВИЖНОЙ СУЧКОРЕЗНОЙ УСТАНОВКИ | 0 |
|
SU243991A1 |
| US 3536113 A, 27.10.1970 | |||
| US 3451448 A, 24.06.1969. | |||
