Изобретение относится к авиационно-космической технике. МВКС предназначена для выведения на околоземные орбиты космических объектов (полезных грузов) различного назначения.
Наиболее близким из известных технических решений является многоразовая воздушно-космическая система (МВКС) по а.с. СССР N 811679, кл. В 64 G 1/14, содержащая транспортный космический корабль (ТКК) с топливным баком и разгонный блок, включающий первую ступень, при этом первая ступень и транспортный космический корабль (ТКК) снабжены основными и вспомогательными двигательными установками, средствами управления, аэродинамическими поверхностями и воздушными рулями, кабинами для экипажей и шасси. В одном из вариантов исполнения в системе предусмотрена вторая невозвращаемая ступень разгонного блока. Первая ступень является базовой унифицированной многоразового пользования. Первая ступень и ТКК пилотируемые. Недостатки указанной системы:
- ограниченность массы полезных грузов, выводимых ТКК на околоземные орбиты; известные ТКК выводят полезные грузы, не превышающие 50 т;
- высокий удельный расход специального дорогостоящего и особо пожаро- и взрывоопасного топлива высокой степени чистоты на выведение на околоземные орбиты полезных грузов; первая и вторая ступени снабжены жидкостными реактивными двигателями (ЖРД), работающими на компонентах "жидкий водород+жидкий кислород";
- низкая удельная аэродинамическая поверхность установленного на выдвижной платформе ТКК, и его очень высокая посадочная скорость;
- высокие физические перегрузки космонавтов при выведении ТКК на околоземные орбиты и спусках на Землю, требующие огромных затрат на отбор, физическую и профессиональную подготовку кандидатов в космонавты, организацию космических экспедиций. Перегрузки сдерживают направление на околоземные орбиты профессионально подготовленных лиц разных специальностей, а также богатых туристов, которые могли бы в перспективе компенсировать часть расходов по освоению космического пространства.
Недостатки известной МВКС являются следствием применения в ней двигателей одного типа - ЖРД. Известно, что поршневые двигатели внутреннего сгорания винтомоторных летательных аппаратов имеют эффективный к.п.д. 30-42%. См. Г. Н.Алексеев "Общая теплотехника" Москва, Издательство "Высшая школа", 1980 г. (стр. 477). Применяемые в самолетах турбокомпрессорные воздушно-реактивные двигатели имеют полный к.п.д. примерно 23-27% (стр. 528), прямоточные воздушно-реактивные двигатели на Земле имеют к.н.д. около 3-5% и экономичны только для сверхзвуковых самолетов (стр. 527). Ядерные турбинные двигатели (ЯТД) с использованием природного урана и реакторов на тепловых нейтронах имеют к.п.д. примерно 0,205%, а с реакторами на быстрых нейтронах 4-6% по отношению к энергии ядерного топлива (стр. 516).
Известен роторно-цилиндровый двигатель непрерывного сжигания топлива, который оснащен внутренней и внешней парогазовой камерами сжигания топливовоздушной смеси и регулятором соотношения топлива и воздуха. Этот двигатель позволяет снизить токсичность продуктов сгорания и повысить к.п.д. до 45-48% (решение о выдаче патента РФ по заявке автора N 99105589). Известен роторно-цилиндровый двигатель непрерывного сжигания топлива для теплоэлектростанций, позволяющий довести к.п.д. до 70-75% (решение о выдаче патента РФ по заявке автора N 99111244). Последний роторно-цилиндровый двигатель состоит из одной газовоздушной или двух и, парогазовой и паровой расширительных машин, каждая из которых вращает свой электрогенератор или свой роторно-цилиндровый нагнетатель энергоносителя. При этом каждая газовоздушная, парогазовая и паровая расширительные машины роторно-цилиндрового двигателя, каждый роторно-цилиндровый нагнетатель энергоносителя, каждый роторно-цилиндровый движитель содержит цилиндрический корпус с торцовыми крышками и, подшипниками и, эксцентрично размещенный в корпусе цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения.
Термины двигатель и движитель в описание введены намеренно, чтобы избежать путаницы, смешения их функционального различия при одинаковых конструктивных элементах. В настоящем тексте под двигателем понимается устройство для преобразования энергии топлива в механическую энергию вращающегося вала. Двигатель состоит из нескольких машин и устройств, например электрогенератора, стартового электродвижителя, муфты сцепления или электротрансблока, нагнетателей воздуха, воды, антифриза, топлива, высокотемпературного теплоносителя, карбюратора или инжектора, газовоздушной, парогазовой, паровой расширительных и других машин. Движитель в настоящем тексте - это устройство для преобразования энергии промежуточного энергоносителя, например электрического тока или сжатых жидкости, газа, воздуха, пара, в механическую энергию вращающегося вала, снабженного гребным или воздушным винтом, колесом или другим рабочим органом.
Указанные недостатки системы прототипа частично устранены в предлагаемой МВКС. Цели предлагаемого изобретения:
- увеличение единичной массы полезных грузов, выводимых ТКК многоразовой воздушно-космической системы на околоземную орбиту;
- снижение удельных расходов наиболее дорогостоящих компонентов топлива и замена части их на более дешевые углеводородные виды топлива;
- снижение удельных затрат на выведение на околоземные орбиты и прием на Земле ТКК;
- уменьшение физических перегрузок космонавтов при выведениях их на околоземные орбиты и спусках на Землю, расширение возможностей использования ТКК для коммерческих и других целей.
Цели, поставленные изобретением, в МВКС, содержащей транспортный космический корабль (ТКК), с основными и вспомогательными двигательными установками, топливным баком, средствами управления, аэродинамическими поверхностями и воздушными рулями, кабинами для экипажей и шасси, и разгонный блок, с основными и вспомогательными двигательными установками, средствами управления, аэродинамическими поверхностями и воздушными рулями, кабинами для экипажей и шасси, достигаются составлением из четырех ступеней, в которых первая является высокоскоростным судном-носителем второй ступени в виде самолета, на сменной платформе которого размещена третья ступень в виде цилиндрической ракеты-носителя, снаружи которой закреплена четвертая ступень в виде самолета, при этом первая ступень, содержащая корпус с подводными крыльями, отсеки для машинного отделения, грузов, экипажа, рубку управления, бак с топливом и двигатели, выполнена в виде обладающего аэродинамической подъемной силой "корпуса-крыла", снабженного подводными крыльями из пространственной фермы, неподвижными боковыми и подвижными торцовыми стенками с уплотнителями, закрепленными под днищем на подвижных полых стойках гидравлическими роторно-цилиндровыми или электрическими движителями с гребными винтами, привод движителей осуществляется роторно-цилиндровыми двигателями, состоящими каждый из одной газовоздушной или двух и, парогазовой и паровой расширительных машин, каждая из которых вращает свой электрогенератор или свой роторно-цилиндровый нагнетатель энергоносителя, при этом напорные трубопроводы к движителям с гребными винтами снабжены клапанами, перекрывающими напорные каналы, а каждый роторно-цилиндровый движитель с гребным винтом, нагнетатель энергоносителя, газовоздушная, парогазовая и паровая расширительные машины содержит цилиндрический корпус с торцовыми крышками и подшипниками и, эксцентрично размещенный в корпусе, цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения, а в случае применения в качестве движителей с гребными винтами электродвижителей, их привод осуществляется от размещенных на судне одного или нескольких электрогенераторов, приводимых во вращение двигателем/ями любого типа, например поршневым, турбокомпрессорным, паро- или газотурбинным, ядерным,
а вторая ступень, содержащая "корпус-крыло", стабилизатор с вертикальным и горизонтальным оперением, систему управления, отсеки экипажа, полезного груза, топливные баки и двигательную установку, выполнена в виде "корпуса-крыла" и закрепленного над ним, на вертикальных килях с общей осью, обладающего аэродинамической подъемной силой горизонтального оперения стабилизатора, снабженного вращающимися вокруг своих осей рулями высоты и поворотов, при чем кили, стабилизатор, днище, боковые стенки, внутренние продольные и поперечные фермы-перегородки, стойки, верхняя поверхность использованы в качестве силовых элементов второй ступени и одновременно для другого функционального назначения, например радиаторов, теплообменников двигателя/ей, сплошных и перфорированных стенок топливных, водяных, пищевых и прочих сборников, баков, стоек полок многоярусных стеллажей для размещения грузов, и при этом часть баков для низкокипящих жидкостей снабжена гидрозатворами в виде U-образной трубки с двумя расширительными элементами,
а третья ступень, содержащая цилиндрический корпус, с топливными баками, основными и вспомогательными двигательными установками, средствами управления, кабину для экипажа и спускаемый аппарат, выполнена с размещенными снаружи замками, открываемыми давлением в шахте второй ступени,
а четвертая ступень, содержащая "корпус-крыло", стабилизатор с вертикальным и горизонтальным оперением, систему управления, отсеки экипажа, полезного груза, топливные баки и двигательную установку, выполнена из "корпуса-крыла" и закрепленного над ним, на вертикальных килях с общей осью, обладающего аэродинамической подъемной силой горизонтального оперения стабилизатора, снабженного вращающимися вокруг своих осей рулями высоты и поворотов, маршевого двигателя, размещенного между горизонтальным оперением стабилизатора и верхней поверхностью "корпуса-крыла" на карданном подвесе с возможностью поворота в трех плоскостях, и размещенных на днище стыковочного узла и замков для соединения с корпусом третьей ступени, при чем горизонтальное оперение стабилизаторов второй и четвертой ступеней может быть выполнено с одной общей осью или несколькими, например двумя-тремя, и с рулями высоты одинаковых или разных размеров, формы, свободными или размещенными в проемах горизонтального оперения.
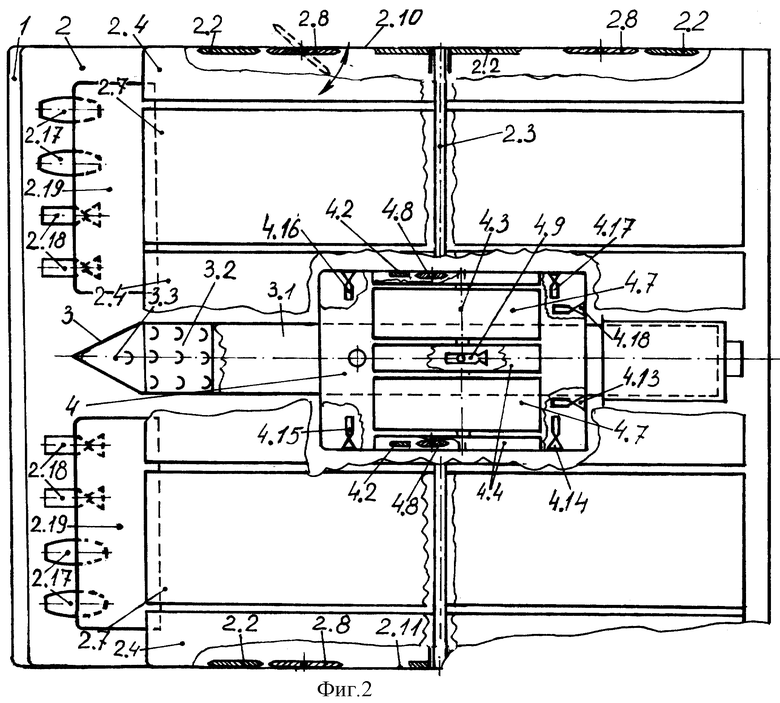
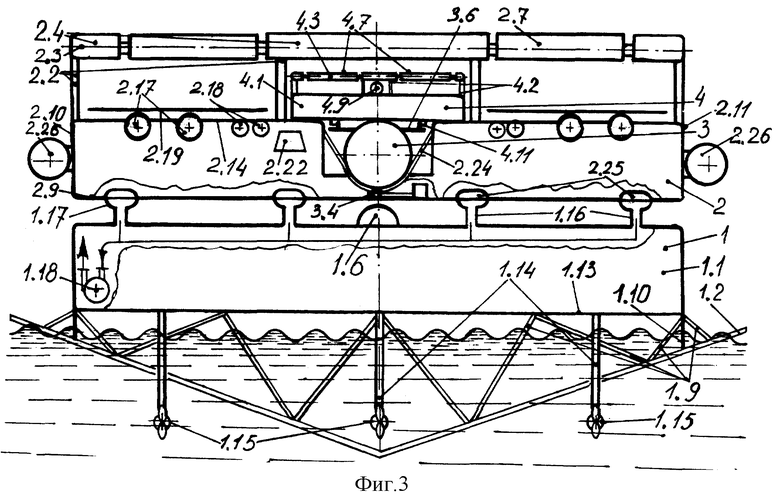
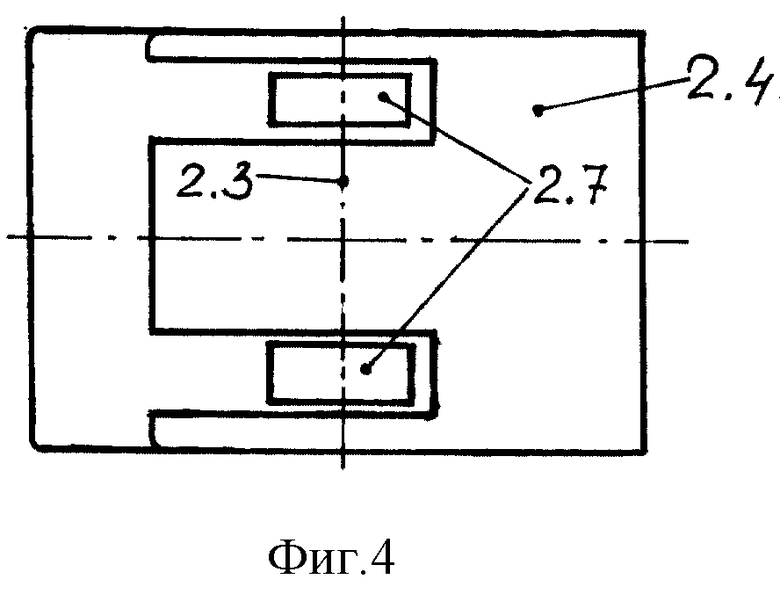
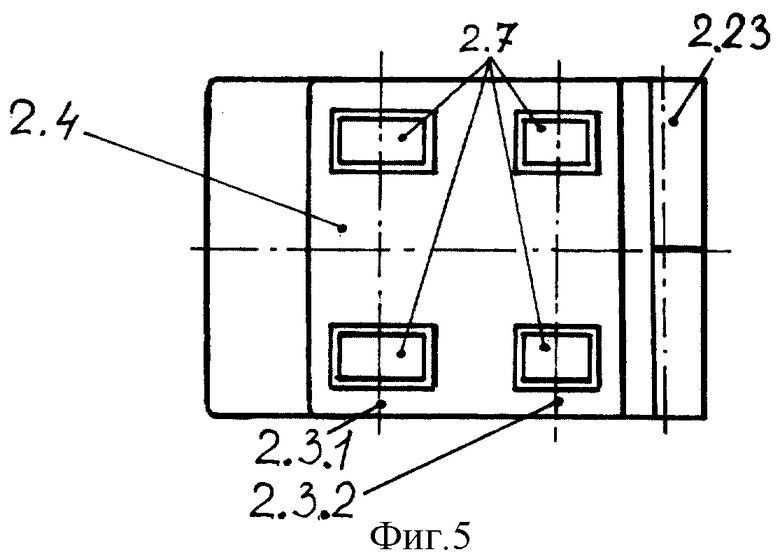
Схематично показано: на фиг. 1 - поперечный разрез МВКС, состоящей из четырех ступеней, в которых первая является высокоскоростным судном-носителем второй ступени в виде самолета, на сменной платформе которого размещена третья ступень, в виде цилиндрической ракеты-носителя, снаружи которой закреплена четвертая ступень в виде самолета; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид спереди; на фиг. 4 и 5 в плане вторая ступень-самолет с разными горизонтальным оперением и рулями высоты; на фиг. 6 - в разрезе узел А на фиг. 1; на фиг. 7 - вид сверху на первую ступень-судно прямоугольной формы с вырезом и балкой с грузоподъемным механизмом для приема приводнившегося самолета-четвертой ступени МВКС или других объектов; на фиг. 8 - гидравлическая схема привода движителей и подвижных стоек с движителями при использовании роторно-цилиндровых двигателей и движителей с гребными винтами.
МВКС (фиг. 1 - 4) составлена из четырех ступеней, в которых первая является высокоскоростным судном 1 - носителем второй ступени в виде самолета 2, на сменной платформе которого размещена третья ступень, в виде цилиндрической ракеты 3 - носителя, снаружи которой закреплена четвертая ступень в виде самолета 4. При этом первая ступень 1, содержащая корпус с подводными крыльями, отсеки для машинного отделения, грузов, экипажа, рубку управления, бак с топливом и двигатели, выполнена в виде обладающего аэродинамической подъемной силой прямоугольного или многоугольного, или круглого (фиг. 1, 2, 3, 7) "корпуса-крыла" 1.1, снабженного подводными крыльями 1.2 и 1.9 в виде пространственной фермы, неподвижными боковыми 1.10 и подвижными торцовыми 1.11 стенками с уплотнителями 1.12 (узел А на фиг. 1, фиг. 6), закрепленными под днищем 1.13 на подвижных полых стойках 1.14 гидравлическими роторно-цилиндровыми или электрическими движителями 1.15 с гребными винтами. Привод движителей 1.15 осуществляется роторно-цилиндровыми двигателями 1.8, состоящими каждый из одной 1.8.1 газовоздушной или двух 1.8.1 и 1.8.2 и, парогазовой 1.8.3 и паровой 1.8.4 расширительных машин, каждая из которых вращает свой электрогенератор или свой роторно-цилиндровый нагнетатель 1.8.6 энергоносителя, при этом напорные трубопроводы 1.8.7 к движителям 1.15 с гребными винтами снабжены клапанами 1.8.9 и 1.8.10, перекрывающими напорные каналы, а каждый роторно-цилиндровый движитель 1.15 с гребным винтом, нагнетатель 1.8.6 энергоносителя, газовоздушная 1.8.1, 1.8.2, парогазовая 1.8.3 и паровая 1.8.4 расширительные машины содержит цилиндрический корпус с торцовыми крышками и подшипниками и, эксцентрично размещенный в корпусе, цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения. В случае применения в качестве движителей 1.15 с гребными винтами электродвижителей 1.15, их привод осуществляется от размещенных на судне одного или нескольких электрогенераторов 1.8.6, приводимых во вращение двигателем/ями любого типа, например поршневым, турбокомпрессорным, паро- или газотурбинным, ядерным.
Вторая ступень 2, содержащая "корпус-крыло", стабилизатор с вертикальным и горизонтальным оперением, систему управления, отсеки экипажа, полезного груза, топливные баки и двигательную установку, выполнена в виде "корпуса-крыла" 2.1, имеющего в плане форму, близкую к прямоугольной, и закрепленного над ним, на вертикальных килях 2.2 с общей осью 2.3, обладающего аэродинамической подъемной силой горизонтального оперения 2.4 стабилизатора, снабженного вращающимися вокруг своих осей 2.3 и 2.5, 2.6 рулями высоты 2.7 и поворотов 2.8, при чем кили 2.2, стабилизатор, днище 2.9, боковые стенки 2.10 и 2.11, внутренние продольные и поперечные фермы-перегородки 2.12, стойки 2.13, верхняя поверхность 2.14 использованы в качестве силовых элементов второй ступени и одновременно для другого функционального назначения, например радиаторов, теплообменников двигателей 1.8, сплошных и перфорированных стенок топливных 1.7.1, 1.7.2, 1.7.3, водяных, пищевых и прочих сборников, баков, стоек 2.13 полок многоярусных стеллажей для размещения грузов, и при этом часть баков для низкокипящих жидкостей снабжена гидрозатвором/ами 2.15 в виде U-образной трубки с двумя расширительными элементами.
Третья ступень 3, содержащая цилиндрический корпус 3.1, с топливными баками, основными и вспомогательными двигательными установками, средствами управления, кабину 3.2 для экипажа и спускаемый аппарат 3.3, выполнена с размещенными снаружи замками 3.4, открываемыми давлением в шахте 2.16 второй ступени.
Четвертая ступень 4, содержащая "корпус-крыло", стабилизатор с вертикальным и горизонтальным оперением, систему управления, отсеки экипажа, полезного груза, топливные баки и двигательную установку, выполнена в виде "корпуса-крыла" 4.1, имеющего в плане форму, близкую к прямоугольной, и закрепленного над ним, на вертикальных килях 4.2 с общей осью 4.3, обладающего аэродинамической подъемной силой горизонтального оперения 4.4 стабилизатора, снабженного вращающимися вокруг своих осей 4.3, 4.5 и 4.6 рулями высоты 4.7 и поворотов 4.8, маршевого двигателя 4.9, размещенного между горизонтальным оперением стабилизатора и верхней поверхностью "корпуса-крыла" на карданном подвесе с возможностью поворота в трех плоскостях, и размещенных на днище 4.12 стыковочного узла 4.10 и замков 4.11 для соединения с корпусом или платформой на корпусе третьей ступени.
Горизонтальное оперение 2.4 стабилизаторов самолетов 2 и 4 (второй и четвертой ступеней) может быть выполнено (фиг. 1 - 5) с одной общей осью 2.3 или несколькими, например 2.3.1 и 2.3.2, с рулями высоты 2.7 одинаковых или разных размеров, формы, свободными или размещенными в проемах горизонтального оперения 2.4. Привод рулей высоты 2.7 может быть рычажно-тросовым или с помощью гидроцилиндров, пневмоцилиндров.
В первой, второй и четвертой ступенях МВКС, имеющих подобные корпуса по типу "корпус-крыло", но снабженных разными двигателями, внутренние продольные и поперечные фермы-перегородки 2.12, стойки 2.13, верхняя поверхность 2,14 устроены почти одинаково и могут быть использованы в качестве силовых элементов своей ступени и одновременно для другого функционального назначения, например радиаторов, теплообменников двигателей, сплошных и перфорированных стенок топливных 1.7.1, 17.2, 1.7.3, водяных, пищевых и прочих сборников, баков, стоек 2.13 полок многоярусных стеллажей для размещения грузов. Часть баков для низкокипящих жидкостей может быть снабжена гидрозатвором/ами 2.15 в виде U-образной трубки с двумя расширительными элементами.
Электрогенераторы 1.8.6 могут размещаться на судне на тех же местах, что и гидравлические или иные нагнетатели 1.8.6 энергоносителей и приводиться во вращение любыми известными двигателями, например поршневыми, турбокомпрессорными, паро- или газотурбинными, ядерными.
Первая ступень МВКС предназначена для многократного использования. Это пилотируемое многофункциональное унифицированное высокоскоростное судно 1 с множеством движителей 1.15 с гребными винтами на поворотных стойках 1.14 под днищем 1.13 может иметь одну или несколько палуб, баков 1.7.1, 1.7.2, 1.7.3 с запасом одинаковых или различных видов топлива для собственных двигателей 1.8 и двигателей 2.17 и 2.18 второй ступени-самолета 2. Топливные баки 1.7.2 и 1.7.3 на судне 1 с баками аналогичного назначения на самолете 2 соединены гибкими бронированными шлангами с подпружиненными обратными клапанами, которые при разделении первой и второй ступеней автоматически закрываются. При полезной нагрузке до 5000 т судно 1 в комплекте с остальными элементами МВКС при полной загрузке может развивать крейсерскую скорость примерно до 400 км/час при волнении моря до 3 баллов. В плане оно может иметь сплошную или разрезанную (фиг. 7) прямоугольную или многоугольную, или круглую, подковообразную, элипсообразную или иную форму, с большим внутренним проемом или колодцем, грузовой балкой 1.20 и грузоподъемным механизмом 1.21 для подъема и транспортировки возвратившихся с околоземных орбит спускаемых аппаратов 3.3 третьих ступеней или четвертых ступеней-самолетов 4. Такие суда помимо работы в составе МВКС могут выполнять другие дополнительные поисковые, спасательные и грузоподъемные работы.
Коммуникации к каждому движителю 1.15 и от них вмонтированы в полые стойки 1.14. Нагнетатели энергоносителей 1.8.6 роторно-цилиндровых, поршневых, электрических, газотурбинных и любых других двигателей, могут быть соединены последовательно или последовательно и параллельно. На схеме (фиг. 8) представлен один их возможных вариантов компоновки системы гидропривода движителей 1.15. Он состоит, для примера из трех роторно-цилиндровых двигателей 1.8, каждый из которых содержит две газовоздушные 1.8.1 и 1.8.2, одну парогазовую 1.8.3 и одну паровую 1.8.4 расширительные машины, а также одну роторно-цилиндровую воздухонагнетательную машину 1.8.5. Каждая из указанных машин соединена с роторно-цилиндровым или любым другим нагнетателем 1.8.6. Вместо нагнетателя 1.8.6 к каждой из машин может быть присоединен электрогенератор 1.8.6. Общий нагнетательный трубопровод 1.8.8 от нагнетателей 1.8.6 энергоносителей всех расширительных машин двигателя соединен через предохранительный клапан 1.8.11 с сборником 1.8.12, что позволяет выравнивать давление в гидросистеме судна 1 и тягу движителей 1.15 с гребными винтами. Напорные трубопроводы 1.8.7 к каждому движителю 1.15 снабжены клапанами 1.8.9 и 1.8.10, перекрывающими напорные каналы 1.8.7 к движителям 1.15 с гребными винтами, что позволяет уменьшать или прекращать тягу одного или группы движителей 1.15 и за счет этого поворачивать судно в нужном направлении, разворачивать его почти на одном месте, двигаться задним ходом без буксира. Это очень большое преимущество для эксплуатации судов в тесных гаванях и портах с причалами. Для привода могут использоваться любые известные двигатели. Наиболее экономичными по удельным расходу топлива и материалоемкости (массе) на единицу мощности могут быть рекомендованы роторно-цилиндровый двигатель непрерывного сжигания топлива, который оснащен внутренней и внешней парогазовой камерами сжигания топливовоздушной смеси и регулятором соотношения топлива и воздуха. Этот двигатель позволяет снизить токсичность продуктов сгорания и повысить к.п.д. до 45-48% (решение о выдаче автору патента РФ по заявке N 99105589). Еще более экономичным является энергоблок для теплоэлектростанций с роторно-цилиндровыми двигателями непрерывного сжигания топлива, позволяющий довести к.п.д. до 70-75% (решение о выдаче автору патента РФ по заявке N 99111244).
Количество роторно-цилиндровых двигателей 1.8, состоящих каждый из газовоздушной одной 1.8.1 или двух 1.8.1 и 1.8.2 расширительных машин, парогазовой 1.8.3 и паровой 1.8.4 расширительных машин, соединенных с ними нагнетателей 1.8.6 энергоносителей, роторно-цилиндровых 1.15 движителей с гребными винтами не ограничено и зависит от размера, водоизмещения, проектируемой скорости, назначения и условий эксплуатации первой ступени-высокоскоростного судна 1. Роторно-цилиндровые и любые другие двигатели 1.8 и движители 1.15, могут устанавливаться рядами, в шахматном или ином порядке (фиг. 1, 3, 8) в зависимости от конструкции каждого конкретного судна. Они могут быть гидравлическими, пневматическими, паровыми, газовоздушными. Вместо роторно-цилиндровых движителей 1.15 на стойках 1.14 могут быть установлены электродвижители 1.15 или привычное название герметичные электродвигатели 1.15 с гребными винтами. Для их привода на судне 1 предусматривается установка электрогенераторов. Для обеспечения электродвижителей 1.15 судов с большим водоизмещением в машинном отсеке 1.3 судна может быть установлен компактный энергоблок теплоэлектростанции с к. п. д. 70-75% (решение о выдаче автору патента РФ по заявке N 99111244). Он содержит оборудование подготовки и подачи любого жидкого и газового топлива (нефть, газойль, керосин, лигроин, дизельное топливо, бензин, пропан, бутан) воздуха, воды, электрогенераторы, расширительные машины, каждая из которых содержит цилиндрический корпус с торцовыми крышками, подшипниками, эксцентрично размещенный в корпусе оребренный ротор, с уплотнителями в виде цилиндрических тел вращения, смесительный парогенератор-гравитационный грязеуловитель, теплообменники, центробежный парогазовый сепаратор, струйный компрессор, центробежный жидкостный сепаратор.
При разработке проекта судна следует учитывать, что в отдельных районах Мирового Океана высота волн во время шторма достигает 10- 15 метров. Количество, форма, размеры подводных крыльев 1.2 и 1.9, стоек 1.14, глубина их погружения определяются расчетами для каждого конкретного типа судов отдельно с учетом назначения и проектируемых условий эксплуатации. Расчетная глубина погружения подводных крыльев 1.2 и 1.9 должна обеспечивать в крейсерском режиме движения судна 1, при максимально допустимом расчетном волнении моря, нахождение крыльев 1.2 под водой без трения днища 1.13 о воду. Подводные крылья 1.9 в крейсерском режиме частично всегда выступают из воды. Подводные крылья 1.2 и 1.9 могут быть объединены в пространственную ферму (фиг. 3), которая состоит из обладающих гидродинамической подъемной силой выпуклых нижних пластин 1.2 и выпуклых наклонных связывающих пластин 1.9. Подвижные полые стойки 1.14 с движителями 1.15 и гребными винтами имеют возможность поворота и изменения вектора тяги в двух плоскостях (фиг. 1, 3, 8). Часть или все стойки 1.14 с движителями 1.15 и гребными винтами могут быть закреплены на кольцевых упорных подшипниках, шарнирах и соединены с одним или двумя гидроцилиндрами 1.22. Управление гидроцилиндрами 1.22 осуществляется от общей системы гидропривода электромагнитными или пневматическими клапанами 1.23. Гидроцилиндры 1.22 предназначены для поворота в одной или двух плоскостях полых стоек 1.14 с движителями 1.15, снабженными гребными винтами, с целью изменения направления вектора тяги гребного винта при разгоне и выводе судна из воды или при повороте судна 1. Ими могут быть снабжены не все, а только часть стоек 1.14. Остальные стойки крепятся к корпусу 1.1 жестко. Количество стоек 1.14, соединенных с гидроцилиндрами 1.22, углы их поворота определяются расчетами. В днище 1.13 для размещения стоек 1.14 предусматриваются расширяющиеся вниз колодцы 1.24 (фиг. 8). Привод стоек 1.14 может быть рычажно-тросовым. Для крепления глубоко погруженных стоек 1.14 могут использоваться дополнительные растяжки из лент, тросов. Часть из емкостей 1.7.1, 1.7.2, 1.7.3, например для низкокипящих жидкостей может быть снабжена гидрозатвором/ами 2.15 в виде U-образной трубки с двумя расширительными элементами. Заполненные незамерзающей жидкостью, гидрозатворы 2.15 позволяют при рабочих температурах избежать появления в емкостях 1.7.1, 1.7.2, 1.7.3 и других избыточного давления и разрежения выше предельно допустимых. "Корпус-крыло" 1.1, 2.1, 4.1 имеет каркас из множества продольных и поперечных, при необходимости сотовых или цилиндрических (фиг. 1), ферм-перегородок 2.12, герметичных воздушных мешков, обладает высокой прочностью, жесткостью, надежностью, плавучестью, безопасностью, непотопляемостью, малой удельной материалоемкостью конструкции. Для придания судну 1 и самолету 4 дополнительной устойчивости при высоком уровне волн в центре тяжести судна 1 или самолета 4 устанавливается грузоподъемный механизм 1.21 (фиг. 7), например тельфер или лебедка, на тросу которой через колодец опускается якорь. Якорь может быть снабжен дополнительным утяжелителем, например свинцовым. Якорь с утяжелителем понижает центр тяжести системы, придает ей дополнительную устойчивость. В качестве утяжелителя для самолета 4 могут использоваться герметичные контейнеры, заранее заполняемые тяжелыми приборами, другими предметами, которые без ущерба временно могут быть опущены в воду в качестве утяжелителей после приводнения самолета 4.
Роторно-цилиндровые одна 1.8.1 газовоздушная или две 1.8.1 и 1.8.2, паровая 1.8.4 и парогазовая 1.8.3 расширительные машины в комплекте обеспечивают высокий (70-75%) к.п.д. двигателя, минимальный удельный расход топлива. "Корпус-крыло" 1.1 обтекаемой формы с аэродинамическим качеством обладает большой удельной подъемной силой и обеспечивает минимальное аэродинамическое сопротивление судну 1 при высокой скорости движения. Подводные крылья 1.2 и 1.9 с малым удельным гидравлическим сопротивлением и большой удельной подъемной силой обеспечивают многократное снижение гидравлического сопротивления "корпусу-крылу" 1.1 судна 1.
Роторно-цилиндровые или электрические движители 1.15 с гребными винтами на поворотных стойках 1.14 с гидроцилиндрами 1.22 позволяют быстро поднимать "корпус-крыло" 1.1 судна 1 из воды и одновременно набирать высокую скорость. В крейсерском режиме, после выхода "корпуса-крыла" 1.1 из воды и достижения необходимой скорости, стойки 1.14 гидроцилиндрами 1.22 возвращаются в исходное, например вертикальное положение. Для использования "корпуса-крыла" 1.1 судна 1 в качестве поплавка с возможностью поддержания судна на заданном уровне независимо от загруженности, оно может быть снабжено неподвижными боковыми стенками 1.10 и подвижными торцовыми стенками 1.11 (узел А на фиг. 1, фиг. 6) с надувными уплотнителями 1.12. В походном положении торцовые стенки 1.11 гидроцилиндрами 1.19 поднимаются и входят в ниши днища 1.13 после выпуска воздуха из надувных уплотнителей 1.12. Перед разгрузкой судна гидроцилиндрами торцовые стенки 1.11 опускаются вниз, надуваются эластичные уплотнители 1.12 и под днище 1.13 судна от любого роторно-цилиндрового нагнетателя воздуха 1.8.5 двигателя 1.8 (фиг. 1, 8) подают сжатый воздух. При этом давлением воздуха под днищем 1.13 регулируют уровень судна 1 относительно причала при разгрузке и погрузке.
Первая ступень-высокоскоростное судно 1 до разработки и внедрения роторно-цилиндровых двигателей непрерывного сжигания топлива 1.8, может быть выполнено с поршневыми двигателями внутреннего сгорания, электротрансблоками или с известными муфтами сцепления, стартовыми движителями и электрогенераторами, роторно-цилиндровыми нагнетателями энергоносителя, каждый из которых содержит цилиндрический корпус с торцовыми крышками, подшипниками, эксцентрично размещенный в корпусе цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения, и лопастными или турбинными движителями 1.15 с гребными винтами.
Предлагаемое выполнение судна позволит начать проектирование и строительство новых высокоскоростных судов с высокой степенью безопасности для плавания при высоком волнении моря до разработки и широкого внедрения роторно-цилиндровых двигателей. Этот вариант менее экономичен, но позволяет выиграть несколько лет.
Первая ступень-высокоскоростное судно 1 до разработки и широкого внедрения более экономичных роторно-цилиндровых двигателей 1.8, состоящих из газовоздушной, парогазовой, паровой расширительных машин, и роторно-цилиндровых нагнетателей энергоносителя, может быть выполнено с поршневыми двигателями внутреннего сгорания, лопастными или турбинными, или шестеренчатыми, или центробежными нагнетателями энергоносителя, и лопастными или турбинными гидравлическими движителями 1.15 с гребными винтами.
Такое выполнение высокоскоростного судна 1 на подводных крыльях не является самым оптимальным вариантом, но также позволяет выиграть несколько лет за счет использования имеющегося оборудования, опыта его создания и эксплуатации. Появились две новые возможности:
- использовать имеющиеся поршневые двигатели внутреннего сгорания, гидронагнетатели (изготавливается множество различных насосов), гидроцилиндры, материалы, комплектующие изделия, опыт проектирования и строительства летательных аппаратов и судов, материальные и трудовые ресурсы, а также свободные производственные мощности и быстро разработать и внедрить в производство изготовление новых конкурентно-способных высокоскоростных судов разного назначения и организовать с их применением в составе МВКС более экономичные запуски на околоземные орбиты ТКК не только для России, но и для зарубежных партнеров; за счет экономии средств на выгодных запусках ТКК параллельно вести разработку и широкое внедрение более экономичных роторно-цилиндровых двигателей внутреннего сгорания, состоящих из газовоздушной, парогазовой, паровой расширительных машин, энергоблоков и роторно-цилиндровых нагнетателей энергоносителей.
При этом возможно и в ряде случаев вполне целесообразно использовать накопленный опыт создания и эксплуатации мощных транспортных газотурбинных двигателей. Первая ступень-высокоскоростное судно 1 до разработки и широкого внедрения более экономичных роторно-цилиндровых двигателей внутреннего сгорания, состоящих из газовоздушной, парогазовой, паровой расширительных машин, и роторно-цилиндровых нагнетателей энергоносителя, большой единичной мощности, может быть выполнено с комбинацией мощных газотурбинных и роторно-цилиндровых двигателей внутреннего непрерывного сжигания топлива малой мощности. При этом одна часть воздуха под давлением после турбокомпрессора газотурбинного двигателя используется для привода гребного винта в пневматическом движителе 1.15 (воздушной роторно-цилиндровой расширительной машине), другая часть воздуха используется в газотурбинной расширительной машине, а продукты сгорания из газотурбинной расширительной машины газотурбинного двигателя под давлением поступают для окончательного расширения в роторно-цилиндровую газовоздушную расширительную машину с роторно-цилиндровым нагнетателем энергоносителя, содержащую цилиндрический корпус с торцовыми крышками, подшипниками, эксцентрично размещенный в корпусе цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения. При чем гребные винты могут быть установлены на валах роторно-цилиндровых или лопастных, или турбинных пневматических воздушных движителей 1.15, обтекатели которых снабжены сферическими накладками, образующими кольцевые щели для выпуска сжатого воздуха. В роторно-цилиндровых пневматических движителях 1.15 отработанный воздух с низким давлением из торцовой крышки выпускается в полость под обтекателем и через отверстие выходит в очень тонкую кольцевую щель между обтекателем и сферической накладкой. При этом за счет совмещения эффектов выхода под давлением и эжекции мельчайшие пузырьки воздуха набегающим слоем воды прижимаются к наружной поверхности обтекателя и создают вокруг него тончайший слой водовоздушной смеси. Сила гидравлического сопротивления движению оболочки пневматического роторно-цилиндрового движителя 1.15 в указанной смеси снижается. Гребной винт в этом случае размещается впереди оболочки движителя 1.15 (фиг. 1). При необходимости судно 1 может быть снабжено многоступенчатой криогенной установкой 1.25 для поддержания требуемого низкотемпературного режима хранения жидких водорода и кислорода, других компонентов МВКС. С третьей ступенью, цилиндрической ракетой 3 - ТКК, криогенная установка 1.25 связана гибкими бронированными теплоизолированными шлангами с обратными клапанами, которые разъединяются и автоматически закрываются при разделении ступеней МВКС. Дальнейшее охлаждение топливных и других компонентов предусматривается за счет естественного холода разреженного околоземного пространства.
Со второй ступенью-самолетом 2 судно 1 соединено стойками 1.16 с вакуумными камерами 1.17 (фиг. 3), дублированное параллельное управление которыми размещено на судне 1 и самолете 2. Для создания и поддержания вакуума в вакуумных камерах 1.17 на судне 1 предусмотрен вакуумный насос 1.18, соединенный с камерами 1.17 трубопроводом.
Вторая ступень МВКС-самолет 2 может быть многократного и одноразового использования с дистанционной системой управления по радиосигналам, без кабины для экипажа 2.22 и шахты 2.16 для выстреливания цилиндрического корпуса ракеты 3. Самолет 2 может быть носителем цилиндрической ракеты 3 либо ракеты 3 с закрепленным на ней возвращаемым самолетом 4, либо только возвращаемого самолета 4. Для крепления каждого указанного объекта создается индивидуальная сменная платформа 2.24. Он может быть снабжен трех, четырех или пятиопорным колесным шасси для взлета с ВПП космодрома либо подводными крыльями, либо вакуумными камерами 2.25, либо другими замками для взлета с судна 1.
Самолет 2 может быть выполнен с комбинацией турбокомпрессорных воздушно-реактивных (ТКВРД) 2.17, и воздушно-реактивных (ВРД) 2.18 двигателей или с двигателями одного из указанных видов, а также с групповой накладкой 2.19 над выходными патрубками двигателей, образующей щель между верхней поверхностью 2.14 "корпуса-крыла" 2.1 и накладкой 2.19. Наружная обшивка верхней поверхности 2.14 "корпуса-крыла" 2.1 в области накладки 2.19 может быть снабжена теплоизоляцией. Расположенная в корме второй ступени шахта 2.16 представляет собой цилиндр, снабженный предохранительным клапаном, например пластинчатым, и зарядом 2.20 твердого топлива, например пороховой шашкой, с электровоспламенителем. Внутри цилиндра 2.16 между зарядом 2.20 и торцом цилиндрической ракеты 3 размещен теплоизолированный диск-поршень 2.21. Торцовая крышка цилиндра 2.20 крепится к шахте 2.16 с возможностью поворота под действием штока гидроцилиндра, выходя из зацепления и сброса под действием силы тяжести и скоростного напора воздуха. Полезная грузоподъемность самолета 2 может достигать 1000 тн, скорость до 1200-1500 км/час, высота полета перед разделением ступеней примерно 11-15 км. При использовании дополнительных реактивных ускорителей, например, пиротехнических твердотопливных патронов 2.26, скорость полета и высота разделения второй и третьей ступеней могут быть увеличены.
Обладающий аэродинамической подъемной силой стабилизатор для самолета 2 одноразового использования может иметь сплошное горизонтальное оперение без рулей высоты 2.7 и с рулями поворотов 2.8 меньшей площади. Для управления креном в самолете предусмотрены элероны 2.23. Для размещения третьей ступени 3-цилиндрического ТКК самолет 2 снабжен сменной платформой 2.24 с продольными направляющими полозьями или плоским фартуком 2.24 и замками 3.4 с пневмоприводом, которые открываются давлением газа в шахте 2.16 после воспламенения пороховой шашки 2.20. Баки с одинаковыми или различными видами топлива для двигателей 2.17 и 2.18 самолета 2 размещаются в корпусе 2.1. Часть из них, например для низкокипящих жидкостей (топлив), при необходимости может быть снабжена гидрозатвором/ами 2.15 в виде U-образной трубки с двумя расширительными элементами. Заполненные незамерзающей жидкостью, гидрозатворы 2.15 позволяют при рабочих температурах избежать появления в баках избыточного давления и разрежения выше предельно допустимых. "Корпус-крыло" 2.1 имеет каркас из множества продольных и поперечных, при необходимости сотовых или цилиндрических, ферм-перегородок 2.12, обладает высокой прочностью, жесткостью, надежностью, плавучестью, безопасностью, непотопляемостью, малой удельной материалоемкостью конструкции. Самолет может быть снабжен трех или четырехопорным шасси, либо подводными крыльями, которые в режиме полета убираются в ниши. Гидропривод и ниши самолета 2 могут быть унифицированы по размерам для колесных шасси и подводных крыльев одновременно. Это позволит использовать самолет 2 в качестве аэроплана и гидроплана без существенных конструктивных изменений.
Третья ступень 3 МВКС - это ТКК в виде цилиндрической ракеты, кабина 3.2 и спускаемый аппарат 3.3, которые могут быть возвращаемыми. ТКК, содержащий цилиндрический корпус 3.1, с топливными баками, основными и вспомогательными двигательными установками, средствами управления, кабину 3.2 для экипажа и спускаемый аппарат 3.3, выполнен с размещенными снаружи замками 3.4, открываемыми давлением в шахте 2.16 второй ступени. Электрическая схема управления воспламенением пороховой шашки 2.20 снабжена реле времени, которое с определенным заданным замедлением после начала воспламенения шашки 2.20 в шахте 2.16 воспламеняет топливо в воздушно-реактивных двигателях/ле ракеты 3. Дублированное параллельное управление воспламенением и открытием замков 3.4 может осуществляться с самолета 2 и пульта управления ракетой 3. Третья ступень может быть радиоуправляемой, предназначенной только для доставки на околоземную орбиту и обратно полезных грузов, или пилотируемой многофункциональной, в частности грузопассажирской со спускаемым аппаратом 3.3, пультом управления, креслами 3.5 и комплектом средств системы жизнеобеспечения в кабине 3.2. предназначенной для доставки в спускаемом аппарате 3.3 на околоземную орбиту и обратно космонавтов и полезных грузов. Третья ступень может быть последней, выполняющей функцию ТКК, или ТКК и одновременно носителем четвертой ступени-самолета 4, или только носителем четвертой ступени-самолета 4.
Четвертая ступень МВКС - возвращаемый пилотируемый самолет 4 или ТКК многократного использования, может быть выполнен с комбинацией турбокомпрессорных воздушно-реактивных (ТКВРД), и воздушно-реактивных (ВРД) либо жидко-реактивных (ЖРД) 4.9 двигателей или с одним маршевым 4.9 двигателем одного из указанных видов на карданном подвесе с возможностью поворота в трех плоскостях. Для маневра в космосе и верхних слоях атмосферы самолет 4 (фиг. 2) может быть снабжен дополнительными двигателями малой тяги 4.13, 4.14, 4.15, 4.16, 4.17, 4.18 с возможностью поворотов части или каждого из них в нескольких плоскостях. ТКК выполнен с теплозащитным покрытием. Размещение космонавтов предусмотрено в креслах 3.5. Обладающий аэродинамической подъемной силой стабилизатор возвращаемого самолета 4 снабжен горизонтальным оперением с рулями высоты 4.7 и с рулями поворотов 4.8 меньшей площади. Для управления креном в самолете предусмотрены элероны 4.19. Для соединения с третьей ступенью 3 возвращаемый самолет 4 снабжен замками 4.11 с пневмоприводом, которые открываются давлением сжатого воздуха из баллонов в корпусе 4.1. Система подачи сжатого воздуха к пневмоцилиндрам привода замков 3.4 предусматривает выпуск отработанного воздуха в герметичный корпус 4.1 или к двигателям 4.9, 4.13, 4.14, 4.14, 4.15, 4.16, 4.17, 4.18. Баки с топливом для двигателей 4.9, 4.13, 4.14, 4.14, 4.15, 4.16, 4.17 и 4.18 размещаются в корпусе 4.1. Часть из них, например для низкокипящих жидкостей (топлив), при необходимости может быть снабжена гидрозатвором/ами 2.15 в виде U-образной трубки с двумя расширительными элементами. Заполненные незамерзающей жидкостью, гидрозатворы 2.15 позволяют при рабочих температурах избежать появления в баках избыточного давления и разрежения выше предельно допустимых. "Корпус-крыло" 4.1 имеет каркас из множества продольных и поперечных, при необходимости сотовых или цилиндрических, ферм-перегородок, герметичных воздушных мешков, обладает высокой прочностью, жесткостью, надежностью, плавучестью, безопасностью, непотопляемостью, малой удельной материалоемкостью конструкции. Возвращаемый самолет 4 может быть снабжен трехопорным шасси, либо подводными крыльями, которые в режиме полета убираются в ниши. Кили 4.2 стабилизатора, днище 4.12, боковые стенки, внутренние продольные и поперечные фермы-перегородки, верхняя поверхность "корпуса-крыла" 4.1 использованы в качестве силовых элементов самолета и одновременно для другого функционального назначения, например сплошных и перфорированных стенок топливных, водяных, пищевых и прочих сборников, баков, стоек и полок многоярусных стеллажей для размещения грузов, например контейнеров с приборами, продуктами, материалами для исследований.
Выбор типа рулей, двигателей, размеров и формы "корпуса-крыла", подвижных и неподвижных частей горизонтального оперения стабилизатора, килей, рулей поворота и осей в них, определяется назначением самолетов второй и четвертой ступеней, требованиями каждого к высоте, скорости, дальности полетов, допустимому расходу топлива, конструктивными соображениями, финансовыми и техническими возможностями изготовителей и заказчиков.
Предложенные новые самолеты 2 и 4 позволяют применить множество дешевых штампованных деталей, изготовить при этом достаточно жесткий и прочный фюзеляж, существенно уменьшить длину, массу, удельные расход топлива, материалоемкость, трудоемкость изготовления аппарата, а также повысить легкость и надежность управления, маневренность. Рули высоты 4.7 на оси 4.3 по центру приложения сил сопротивления имеют примерно равно нагруженные плоскости, при этом обладают значительной аэродинамической подъемной силой, что выгодно отличает их от консольных зависающих рулей известных самолетов и ТКК. Равно нагруженные рули поворота 4.8 на осях 4.5 и 4.6 внутри килей могут иметь значительно большие площади и создавать очень большие управляющие моменты, что также выгодно отличает их от известных. В самолетах 2 и 4 могут применяться консольные рули поворотов. Прямоугольная форма фюзеляжа облегчает компоновку самолетов для различного функционального применения, в частности позволяет использовать днище 4.12 для размещения стыковочного узла 4.10 для соединения с другими ТКК и орбитальными станциями.
Самолет 4 (фиг. 1 - 3) может иметь термостойкие верхние, нижние, боковые, передние двери, люки, иллюминаторы, внутренние жесткие, цельные, складные и надувные трапы, встроенные емкости для воды и других ингридиентов.
Самолеты 2 и 4 могут проектироваться на использование разных двигателей/я в зависимости от финансовых и других возможностей и требований заказчика. Каждый тип и конкретное исполнение двигателя имеют свои преимущества и недостатки. При этом отдельные недостатки, например повышенный удельный расход топлива, могут компенсироваться преимуществами, например более доступной ценой двигателя, видом топлива, что очень важно с точки зрения заказчика. Выбор формы "корпуса-крыла" 4.1 и стабилизатора в плане уточняется расчетами и испытаниями модельных образцов самолетов в зависимости от назначения, проектируемых скоростей и высот полета на разных участках пути самолета. На взлете самолета 2 могут использоваться турбокомпрессорные воздушно-реактивные (ТКВРД) 2.17. При достижении заданных высоты и скорости полета самолета 2 дополнительно включаются ВРД 2.18.
Сочетание двигателей с отличающимися к.п.д. на разной высоте и скорости, указанных различных форм "корпуса-крыла", килей и стабилизатора с равно нагруженными рулями высоты и поворотов в них, при очень высокой удельной аэродинамической поверхности и подъемной силе, позволяет создавать более экономичные самолеты 2 и 4 для полетов на разных высотах и скоростях.
Самолеты 2 и 4 могут быть снабжены роторно-цилиндровыми гидравлическими или пневматическими движителями колес, каждый из которых содержит цилиндрический корпус с торцовыми крышками, опорными и упорными подшипниками, эксцентрично размещенный в нем полый цилиндрический оребренный ротор с уплотнителями в виде цилиндрических тел вращения. Для этого один или несколько двигателей 1.8 оснащаются электротрансблоками и нагнетателями 1 8.6. Разгон самолета типа "корпус-крыло" с грузом при взлете и торможение при посадке с использованием роторно-цилиндровых движителей колес в сочетании с двигателями, тормозами, парашютами и другими известными устройствами этого назначения позволяет существенно сократить длину участка разбега-посадки, удельный расход топлива.
Самолет 4 может быть выполнен с "корпусом-крылом" из двух половин на общей раме, между которыми закреплена сменная негерметичная платформа 2.24 (фиг. 3) с обтекателем, под которым на околоземную орбиту можно выводить негабаритные грузы, например длинные металлоконструкции, научные приборы для орбитальных станций.
МВКС и ее отдельные элементы могут проектироваться с учетом использования в комплексе ранее созданных и проверенных ТКК, а также группами отдельных проверенных и вновь создаваемых элементов по нескольким основным вариантам:
1. Для вывода на околоземную орбиту самолетом 2, с трех или четырех, или пятиопорным шасси взлетающим с ВПП космодрома, цилиндрической ракеты 3-ТКК с полезным грузом, включающим:
- экипаж, который остается для работы на орбитальной станции и будет эвакуирован следующим ТКК;
- экипаж и спускаемый аппарат в составе ТКК с системой жизнеобеспечения;
- экипаж и груз в возвращаемом самолете 4 с автономной системой жизнеобеспечения.
2. Для вывода на околоземную орбиту, разгоняемой высокоскоростным судном 1 и самолетом 2, цилиндрической ракетой 3-ТКК с полезным грузом, включающим:
- экипаж, который остается для работы на орбитальной станции и будет эвакуирован следующим ТКК;
- экипаж и спускаемый аппарат в составе ТКК с системой жизнеобеспечения;
- экипаж и груз в возвращаемом самолете 4 с автономной системой жизнеобеспечения.
3. Для вывода на околоземную орбиту самолетом 2, взлетающим с высокоскоростного судна 1 или ВПП космодрома, возвращаемого самолета 4 с полезным грузом, включающим:
- экипаж, который остается для работы на орбитальной станции и будет эвакуирован следующим ТКК;
- экипаж и груз в возвращаемом самолете 4 с автономной системой жизнеобеспечения.
Помимо основных, указанных вариантов возможны дополнительные комбинации составных элементов МВКС, связанные с выполнением новых задач.
Во всех случаях высокоскоростное судно 1, самолет 2, цилиндрическая ракета 3 и самолет 4 МВКС целесообразно проектировать максимально унифицированными на наибольшую перспективную рабочую нагрузку со сменными рабочими органами, платформами.
Унифицированная МВКС используется следующим образом. Судно 1 разгоняют до скорости 350-400 км/час. Для этого гидроцилиндрами 1.22 стойки 1.14 с роторно-цилиндровыми движителями 1.15 и гребными винтами (фиг. 1, 8) поворачивают вверх на заданный угол. Затем открывают клапана 1.8.9 для движения судна 1 вперед. При открывании клапанов 1.8.10 для движения назад стойки 1.14 остаются в начальном положении. Энергоноситель, например жидкий, под давлением нагнетателей 1.8.6 проходит через роторно-цилиндровые или любые иные движители 1.15, приводит во вращения их гребные винты, а отдавшая энергию сжатия жидкость по всасывающему трубопроводу циркулирует к нагнетателям 1.8.6. Под действием вращающихся гребных винтов судно 1 начинает двигаться в заданном направлении. При необходимости гидроцилиндрами поворачивают направо или налево стойки 1.14 всех или части движителей 1.15 с гребными винтами и за счет изменения направления вектора тяги винтов поворачивают судно 1 в нужном направлении. Поворот судна 1 можно производить отключая движители 1.15 с гребными винтами одной стороны судна. За счет тяги движителей 1.15 одной стороны и гидравлического сопротивления другой стороны судно 1 разворачивается почти на месте. После маневрирования судно 1 устанавливают на заданный курс. Вращающиеся гребные винты движителей 1.15 на несколько повернутых вверх стойках 1.14 одновременно толкают судно 1 вперед и вверх до тех пор пока не наступит равновесие движущих сил и сил сопротивления движению. При увеличении подачи топлива в двигатели 1.8 быстро увеличивается давление в напорном трубопроводе 1.8.7 и частота вращения роторно-цилиндровых или иных движителей 1.15 и гребных винтов. При правильной соразмерности водоизмещения, загруженности и мощности двигателей 1.8, "корпус-крыло" 1.1 судна 1 гребными винтами быстро выводится из воды. Одновременно выпускают сжатый воздух из уплотнителей 1.12 и гидроцилиндрами 1.19 подвижные торцовые крышки 1.11 на шарнирах устанавливают в походное положение в ниши/у днища 1.13. Гидравлическое сопротивление движению корпуса 1.1 судна 1 резко уменьшается и скорость судна 1 увеличивается. По мере увеличения скорости судна увеличивается аэродинамическая подъемная сила, действующая на "корпус-крыло" 1.1. Судно в форме "корпуса-крыла" с подводными крыльями 1.2 и 1.9 в виде пространственной фермы в движении над водой находится под действием суммарных гидродинамических и аэродинамических подъемных сил, сил тяжести и сил сопротивления движению самого судна, самолетов 2 и 4, цилиндрической ракеты 3. После достижения первой заданной скорости стойки 1.14 гидроцилиндрами 1.22 устанавливают в исходное положение, при котором валы гребных винтов параллельны уровню воды. Перевод движителей 1.15 в горизонтальное положение также увеличивает скорость судна 1. Это является следствием того, что в крейсерском режиме, после достижения необходимой скорости и вывода "корпуса-крыла" 1.1 судна 1 из воды, в отличие от известных мелкосидящих судов на подводных крыльях с наклонно расположенным валом гребного винта, обеспечивается максимальная путевая тяга движителей 1.15 с гребными винтами. Подъемную силу МВКС увеличивают аэродинамические поверхности самолетов 2 и 4.
Одна роторно-цилиндровая газовоздушная 1.8.1 или две 1.8.1 и 1.8.2, паровая 1.8.4 и парогазовая 1.8.3 расширительные машины каждого двигателя 1.8 обеспечивают высокий (около 70-75%) к.п.д. двигателя, минимальный удельный расход дешевого углеводородного топлива, например дизельного. "Корпус-крыло" 1.1 обтекаемой формы с аэродинамическим качеством обладает большой удельной подъемной силой и обеспечивает минимально возможное аэродинамическое сопротивление судну 1 при прочих равных условиях, в том числе при высоких волне и скорости движения. Подводные крылья 1.2 и 1.9 в виде высокой пространственной фермы с малым удельным гидравлическим сопротивлением и большой удельной подъемной силой обеспечивают многократное снижение гидравлического сопротивления "корпусу-крылу" 1.1 судна 1. Роторно-цилиндровые или иные движители 1.15 с гребными винтами на поворотных стойках 1.14 с гидроцилиндрами 1.22 позволяют быстро поднимать корпус 1.1 судна 1 из воды, набирать высокую скорость. В крейсерском режиме судно 1 при достаточной мощности двигателей 1.8 и движителей 1.15 с гребными винтами способно развивать скорость до 400 км/час.
Уменьшение подачи топлива в двигатели 1.8 приводит к уменьшению давления энергоносителя, например жидкого, в напорном трубопроводе 1.8.7, частоты вращения гребных винтов и тяги движителей 1.15. При недостаточной тяге под действием силы тяжести "корпус-крыло" 1.1 может за несколько секунд плавно опуститься на воду и двигаться далее безопасным малым ходом или остановиться, или изменить направление движения в сторону или назад и таким маневром своевременно предупредить столкновение одного судна с другим или с посторонним предметом.
В случае длительной остановки судна 1 по любой причине, в том числе из-за высокого уровня волн, движители 1.1 с гребными винтами выключаются, судно 1 ложится в дрейф и при необходимости герметизируется. Сообщение герметичного внутреннего объема "корпуса-крыла" 1.1 с атмосферой осуществляется через закрытый колпаком 1.6 от волн воздуховод в верхней части судна 1, например в области рубки управления под контролем экипажа. Часть газовоздушных 1.8.1 и 1.8.2, паровых 1.8.4 и парогазовых 1.8.3 расширительных машин с электрогенераторами продолжают работать, обеспечивать судно электроэнергией. При использовании в качестве движителей 1.15 герметичных электродвигателей 1.15 процесс разгона или остановки судна 1 отличается системой пользования электрическими переключателями.
Самолет 2 - носитель цилиндрической ракеты 3, включающий "корпус-крыло", стабилизатор с вертикальным и горизонтальным оперением, систему управления, отсеки экипажа, полезного груза, топливные баки и двигательную установку, выполненный в виде "корпуса-крыла" (фюзеляжа) 2.1, имеющего в плане форму, близкую к прямоугольной, взлетает и управляется в полете следующим образом.
При взлете двигатели самолета 2, соединенного с судном 1 вакуумными камерами 1.17 и 2.25, запускают на топливе из баков, размещенных на судне 1. Подача топлива осуществляется по временным бронированным шлангам с обратными клапанами. Разогретые турбокомпрессорные воздушно-реактивные 2.17 и/или воздушно-реактивные двигатели 2.18 переключают на режим максимальной или необходимой расчетной тяги, сразу после вывода судна 1 на курс взлета. Двигатели самолета 2 увеличивают тягу и скорость разгона судна 1.
Обладающие аэродинамической подъемной силой "корпус-крыло" 2.1 и горизонтальное оперение 2.4 и 2.7 стабилизатора, за счет разницы давлений над верхней и нижней поверхностями, по мере увеличения скорости разгона приобретают увеличивающуюся подъемную силу.
Возможны два варианта управления взлетом самолета 2:
- рули высоты 2.7 передними концами перед взлетом слегка повернуты к фюзеляжу. Это положение рулей высоты немного уменьшает подъемную силу. При приближении к заданной скорости отрыва подъемная сила сначала уравновешивает, а затем начинает превышать силу тяжести самолета 2 с грузом. При достижении заданной скорости взлета одновременно переводят рули высоты 2.7 самолета 2 передней кромкой вверх, выше горизонтальной плоскости, этим создают импульс дополнительной подъемной силы, пускают воздух в вакуумные камеры 1.17 и 2.25, этим отключают силу вакуумного сцепления судна 1 и самолета 2, отключают вакуумный насос 1.18 и с запасом подъемной силы самолет 2 отрывается от вакуумных камер 1.17 и начинает свободный полет;
- рули высоты 2.7 держат в горизонтальном положении, самолет 2 вместе с судном 1 набирает необходимую скорость и при определенном превышении подъемной и тяговой силами суммарных сил тяжести и сопротивления движению вверх и вперед, одновременно пускают воздух в вакуумные камеры 1.17 и 2.25, этим отключают силу вакуумного сцепления судна 1 и самолета 2, отключают вакуумный насос 1.18 и с запасом подъемной силы самолет 2 начинает свободный полет. Достаточность превышения подъемной и тяговой силами суммарных сил тяжести и сопротивления самостоятельному движению самолета 2 вверх и вперед контролируют по уровню выхода судна 1 из воды и скоростному напору воды. Самолет 2 с запасом подъемной силы и тяги собственных двигателей с небольшим импульсом силы отрыва взлетает с вакуумных камер 1.17 судна 1 и переходит в режим свободного полета. Бронированные шланги для подачи топлива из баков судна 1 к двигателям самолета 2 автоматически расцепляются, а обратные клапана на шлангах силой пружин закрываются. Самолет 2 начинает использование топлива из собственных топливных баков только после разъединения шлангов, которое наступает при достижении заданной скорости взлета, равной примерно 350-400 км/час. Это позволяет сохранить часть более дорогого авиационного топлива самолета 2, например керосина, бензина, и использовать съэкономленное при разгоне на судне 1 топливо для увеличения скорости и высоты разделения второй и третьей ступеней МВКС.
Положение самолета 2 в воздухе регулируется тягой двигателей 2.17 и 2.18, положением равно нагруженных рулей высоты 2.7 и рулей поворотов 2.8, легко поворачивающихся вокруг своих осей. Для создания крена при повороте самолета используют элероны (свисающие закрылки) 2.23. Приземление самолета 2 осуществляется путем плавного планирования вниз в сочетании с постепенным уменьшением тяги двигателей с посадкой на колесное шасси или подводные крылья. Использование судна 1 и самолета 2 предложенной МВКС позволяет разогнать ТКК-третью ступень цилиндрическую ракету 3 до скорости 1200-1500 км/час (333-416 м/сек) и провести разделение второй и третьей ступеней на высоте 11-15 км. При использовании дополнительных реактивных ускорителей, например, пиротехнических твердотопливных патронов 2.26, скорость полета и высота разделения второй и третьей ступеней могут быть дополнительно увеличены.
Дублированное параллельное управление запуском третьей ступени, цилиндрической ракеты 3-ТКК, может осуществляться дистанционно по радиосигналам из Центра управления полетами (ЦУП) либо экипажем самолета 2, либо экипажем ТКК с собственного пульта управления. Электрическая схема управления воспламенением пороховой шашки 2.20, снабженная реле времени, с определенным заданным замедлением после начала воспламенения пороховой шашки 2.20 в шахте 2.16 воспламеняет топливо в воздушно-реактивных двигателях/ле ракеты 3. При этом в шахте 2.16 создается избыточное давление, которое одновременно давит на пневмопривод замков 3.4, соединяющих самолет 2 и ракету 3, и разъединяет их, а также на поршень 2.21 и выталкивает (выстреливает) цилиндрическое тело ракеты 3 из короткоствольной шахты 2.16. Одинаковые по величине, но разнонаправленные силы в доли секунды разделяют самолет 2 и ракету 3. Несколько секунд ракета 3 за счет сил инерции и импульса силы давления газов пороховой шашки 2.20 продолжает лететь практически в прежнем направлении. Включение через реле времени собственных двигателей ракеты 3 с некоторым запаздыванием дает очень небольшое, но вполне достаточное время для изменения направления полета самолета 2 и увода его за 3-5 секунд на безопасное расстояние (1-2 км) от высокотемпературного пламени воздушно- реактивных или водородно-кислородных двигателей ракеты 3. Дальнейший полет ракеты 3, содержащий цилиндрический корпус 3.1, с топливными баками, основными и вспомогательными двигательными установками, средствами управления, при необходимости кабину 3.2 для экипажа, грузов и спускаемый аппарат 3.3, продолжается под управлением по известным отработанным программам из ЦУП либо экипажем ТКК.
Для посадки самолета 2 в запланированном районе, например на ВПП космодрома используют массу самолета, запас высоты, скорости и постепенным планированием доводят посадочную скорость до заданной, минимально допустимой. Этим достигается минимальный расход топлива на этапе посадки. В случае просчета или непредвиденного изменения ситуации в полете необходимо срочно, но планомерно уменьшать (гасить) скорость самолета. Для этого тягу двигателей 2.17 уменьшают до минимально возможной, затем применяют аэродинамическое торможение рулями высоты 2.7, элеронами 2.23 путем одно или многократного разумного пикирования с подъемами за счет сил инерции, и при необходимости вновь увеличивают тягу двигателей 2.17 для подлета к ВПП с оптимальной посадочной скоростью. Многократные короткие пикирования и подъемы за счет сил инерции, а также выход на оптимальный курс к месту посадки выполняют по волнообразной траектории изменением положения рулей высоты 2.7 и элеронов 2.23.
Дублированное параллельное управление запуском четвертой ступени, самолетом 4, с корпуса 3.1 или платформы 3.6 цилиндрической ракеты 3-ТКК, может осуществляться дистанционно по радиосигналам из ЦУП либо экипажем пилотируемого возвращаемого самолета 4 с собственного пульта управления. Разделение ракеты 3 и самолета 4 производят на околоземной орбите. Перед разделением ориентируют ракету 3 в оптимальном направлении, а затем включают двигатель 4.9 либо один из двигателей малой тяги 4.13, 4.14, 4.15, 4.16, 4.17, 4.18 и создают им тягу в нужном направлении. В пневмопривод замков 4.11 из баллонов со сжатым воздухом на борту самолета 4 подают порцию сжатого воздуха. Импульс силы давления воздуха рассоединяет замки 4.11, сила тяги работающего двигателя отводит самолет 4 на безопасное для дальнейшего маневрирования расстояние. Система подачи сжатого воздуха к пневмоцилиндрам привода замков 3.4 предусматривает выпуск отработанного воздуха в герметичный корпус 4.1 или к двигателям 4.9, 4.13, 4.14, 4.14, 4.15, 4.16, 4.17, 4.18. Последующее управление самолетом 4 и стыковку с орбитальной станцией осуществляет экипаж самолета 4 либо дистанционно ЦУП. Управление третьей ступенью МВКС, головной частью ракеты 3 без ранее отделившихся от нее сгораемых в атмосфере топливных баков и двигательных установок, также осуществляет ЦУП.
Маневры в космосе и верхних слоях атмосферы самолет 4 осуществляет путем периодического включения двигателей маршевого 4.9 и двигателей малой тяги 4.13, 4.14, 4.15, 4.16, 4.17, 4.18, имеющих возможность поворотов в нескольких плоскостях. Размещение космонавтов предусмотрено в креслах 3.5. Соединение самолета 4 с орбитальной станцией осуществляется с использованием стыковочного узла 4.10. Спуск с орбиты производится после расстыковки. Обладающие большой удельной аэродинамической подъемной силой "корпус-крыло" и стабилизатор возвращаемого самолета 4, снабженного высокоразвитым горизонтальным оперением с рулями высоты 4.7, рулями поворотов 4.8, а также элеронами 4.19, позволяют дольше спускать самолет 4 по более длинной волнообразной траектории с многократным использованием аэродинамического торможения. При этом уменьшается скорость вхождения самолета 4 в плотные слои атмосферы, снижаются температурные нагрузки на поверхность самолета 4 и физические нагрузки на членов экипажа.
Предлагаемая многоразовая воздушно-космическая система имеет следующие преимущества перед известными:
1. Масса полезного груза, выводимого на околоземную орбиту при прочих равных условиях, может быть увеличена примерно на массу топлива, расходуемого цилиндрической ракетой-носителем для достижения высоты 11-15 км со скоростью 1200-1500 км/час. Для известных ракет это может составить 10-20 т за один запуск.
2. Снижение удельного расхода специального дорогостоящего и особо пожаро- и взрывоопасного топлива высокой степени чистоты на выведение на околоземные орбиты полезных грузов. Замена части дорогостоящего топлива более распространенными и дешевыми видами топлив.
3. Увеличение удельной аэродинамической поверхности, основных элементов МВКС и создание предпосылок для снижения скоростей взлета и посадки возвращаемых ТКК в виде самолета с высокоразвитой аэродинамической поверхностью.
4. Снижение уровня физических перегрузок членов экипажей при выведениях ТКК на околоземные орбиты и спусках на Землю. Снижение уровней требований к физической подготовке кандидатов в космонавты. Создание предпосылок для привлечения в космические путешествия физически здоровых богатых туристов, которые могли бы в перспективе компенсировать часть расходов по освоению космического пространства.
5. Снижение удельных затрат на выведение в космос и прием на Земле возвращающихся космических экспедиций.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ | 2000 |
|
RU2167787C1 |
| ДВИГАТЕЛЬ, ВЕРТОЛЕТ, МЕЛКОВОДНОЕ СУДНО | 1999 |
|
RU2153088C1 |
| ВЫСОКОСКОРОСТНОЕ СУДНО | 2000 |
|
RU2163555C1 |
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, РОТОРНО-ЦИЛИНДРОВЫЙ ДВИГАТЕЛЬ, МНОГОРАЗОВАЯ НАЗЕМНО-ВОЗДУШНАЯ И МНОГОРАЗОВАЯ ВОДНО-ВОЗДУШНАЯ КОСМИЧЕСКИЕ СИСТЕМЫ | 2001 |
|
RU2217358C2 |
| СУДНО И ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2001 |
|
RU2217342C2 |
| РУЧКА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2175290C2 |
| Многоразовая воздушно-космическая система | 1975 |
|
SU580696A1 |
| Многоразовая воздушно-космическая система | 1978 |
|
SU811679A1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2000 |
|
RU2178753C2 |
| ЭНЕРГОБЛОК | 2000 |
|
RU2174611C1 |
Изобретение относится к области авиационно-космической техники. Система содержит транспортный космический корабль, имеющий основные и вспомогательные двигательные установки, топливные баки, средства управления, аэродинамические поверхности и воздушные рули, кабину для экипажа и шасси, ступени разгонного блока. Система имеет четыре ступени разгонных блоков. Первая ступень в виде высокоскоростного судна-носителя имеет корпус в виде крыла для создания аэродинамической подъемной силы, подводные крылья. Вторая ступень в виде самолета, который имеет корпус в виде крыла и стабилизатор, выполненный с горизонтальным оперением для создания аэродинамической подъемной силы и закрепленный над корпусом на вертикальных килях, и который имеет шахту со сменной платформой. Третья ступень в виде цилиндрической ракеты-носителя. Четвертая ступень выполнена в виде космического корабля, имеющего корпус в виде крыла, на котором размещены стыковочный узел и замки для соединения с ракетой-носителем третьей ступени. Изобретение направлено на снижение стоимости доставки полезного груза на околоземную орбиту. 8 ил.
Многоразовая воздушно-космическая система, содержащая транспортный космический корабль, имеющий основные и вспомогательные двигательные установки, топливные баки, средства управления, аэродинамические поверхности и воздушные рули, кабину для экипажа и шасси, ступени разгонного блока, отличающаяся тем, что она имеет четыре ступени разгонных блоков, первая ступень в виде высокоскоростного судна-носителя имеет корпус в виде крыла для создания аэродинамической подъемной силы и подводные крылья, вторая ступень в виде самолета, который имеет корпус в виде крыла, и стабилизатор, выполненный с горизонтальным оперением для создания аэродинамической подъемной силы и закрепленный над корпусом на вертикальных килях, который имеет шахту со сменной платформой, третья ступень в виде цилиндрической ракеты-носителя, которая выполнена с размещенными снаружи замками, которые предназначены для открытия давлением в шахте самолета второй степени с возможностью установки на сменной платформе второй ступени, и четвертую ступень, которая выполнена в виде космического корабля, имеющего корпус в виде крыла, на котором размещены стыковочный узел и замки для соединения с ракетой-носителем третьей ступени.
| Многоразовая воздушно-космическая система | 1978 |
|
SU811679A1 |
| ГИДРОМЕХАНИЗИРОВАННЫЙ АГРЕ ГАТ—РАСТЕНИЕ-ПИТАТЕЛЬ | 0 |
|
SU264030A1 |
| US 4884770 А, 05.12.1989 | |||
| МНОГОСТУПЕНЧАТАЯ ТРАНСПОРТНАЯ СИСТЕМА С ГОРИЗОНТАЛЬНЫМ СТАРТОМ ДЛЯ КОСМИЧЕСКОГО ПОЛЕТА И СПОСОБ ЕЕ ЗАПУСКА | 1996 |
|
RU2120398C1 |

