Изобретение относится к области машиностроения и в частности к электрическим ручным перфораторам и сверлильным машинам, применяемым в строительстве, в геологоразведочных и буровзрывных работах, для образования отверстий в различных конструкционных и строительных материалах и их разрушения.
Известны ручные машины, имеющие устройство для переключения в два режима работы, состоящие из двух сменных колес с различным числом зубьев, которые с помощью привода устанавливаются в зацепление с блоком шестерен промежуточного вала, для взаимного вращения, при этом исключено их осевое перемещение на ведомом валу, с которым они вводятся в кинематическое зацепление с помощью подвижной шпонки, имеющей два выступа для поочередного зацепления с каждой из шестерен, и шпонка связана с рычагом, конец которого расположен между двумя пружинами, установленными друг за другом в ползуне, связанном с движковым переключателем, закрепленным в корпусе (Патент Германии N 3234571, кл. В 23 В 45/02 от 17.09.82 г.).
Такая машина обладает недостатком, заключающимся в том, что переключение машины с одной скорости на другую, с помощью движкового переключателя, сопровождается преодолением значительного усилия от пружин сжатия ползуна, а это требует, в свою очередь, жесткого механизма фиксации движкового переключателя при зацеплении его в крайних положениях, что затрудняет ручные манипуляции в процессе переключения режимов работы ручной машины.
Ближайшим по своей технической сущности является ручная машина, вращательного или ударно-вращательного действия, имеющая возможность переключения с помощью ручки управления в, по крайней мере, два режима работы и содержащая корпус, привод вращения с промежуточным валом, кинематически связанным с ведомым валом, на котором установлен свободно в осевом и кинематически связанный в радиальном направлениях блок зацепления, имеющий две группы элементов зацепления, входящие в крайних осевых положениях блока зацепления в ответные элементы зацепления ручной машины, установленную в корпусе параллельно оси ведомого вала штангу, на которой свободно относительно ее оси установлен с помощью двух проушин ползун, на штанге установлено устройство для осевого сдвига блока зацепления, которое подпружинено относительно ползуна, в ползуне выполнен паз для взаимодействия с эксцентриком ручки управления, установленной в корпусе. Ударная электродрель модели PSB7-1013, каталог фирмы Elmos, 1997 г. - прототип.
Хотя эта ручная машина не имеет недостатков аналога, она, тем не менее, обладает недостатком, заключающимся в больших габаритах устройства переключения режимов работы, а вместе с ним и ручной машины в целом.
В такой ручной машине рычаг для сдвига блока зацепления установлен между двумя пружинами сжатия, установленными с предварительным поджатием. При серийном производстве характеристики пружин имеют определенный разброс параметров и длина предварительно поджатых до определенного усилия пружин может быть различной. Учитывая, что рычаг находится между указанными пружинами, его положение в пространстве также имеет разброс.
Учет нестабильности положения рычага приводит к росту габаритов устройства переключения режимов и ручной машины в целом.
В основу изобретения поставлена задача создания ручной машины, имеющей возможность переключения, как минимум, в два режима работы и обладающей минимальными габаритами.
Поставленная задача решается тем, что в ручной машине вращательного или ударно-вращательного действия, имеющей возможность переключения с помощью ручки управления в, по крайней мере, два режима работы и содержащей корпус, привод вращения с промежуточным валом, кинематически связанным с ведомым валом, на котором установлен свободно в осевом и кинематически связанный в радиальном направлениях блок зацепления, имеющий две группы элементов зацепления, входящие в крайних осевых положениях блока зацепления в ответные элементы зацепления ручной машины, установленную в корпусе параллельно оси ведомого вала штангу, на которой свободно в осевом направлении установлен с помощью двух проушин ползун, на штанге установлено устройство осевого сдвига блока зацепления, подпружиненное относительно ползуна, в последнем выполнен паз для взаимодействия с эксцентриком ручки управления, установленной в корпусе; устройство осевого сдвига блока зацепления состоит из двух рычагов, охватывающих блок зацепления с противоположных сторон и подпружиненных так, что действие пружины направлено на сближение рычагов между собой, а каждый из рычагов связан со штангой ведущей и опорной проушинами, причем ведущие проушины обоих рычагов примыкают к проушинам ползуна.
В такой ручной машине положение рычагов, которое обеспечивает осевой сдвиг блока зацепления и его координаты в крайних осевых положениях ползуна, не зависит от изменений параметров пружины, в данном случае пружины сжатия, установленной между ведущими проушинами рычагов, так как оно (это положение) зависит от колебаний размера между проушинами ползуна. Обычно такая деталь как ползун выполняется методом штампования, что определяет нестабильность размера между проушинами не более 0,1-0,2. Практически такой разброс в положении рычагов не приводит к росту габаритов устройства переключения режимов работы и ручной машины в целом.
Наряду с этим, в ручной машине между рычагами установлена пружина кручения, концы которой опираются на ведущие проушины рычагов.
При таком выполнении ручной машины длинновые габариты устройства сдвига блока зацепления, а вместе с ним и ручной машины в целом, становятся еще меньше, поскольку уменьшаются габариты самой пружины, которая прижимает ведущие проушины рычагов к проушинам ползуна. Это позволяет сократить расстояние между проушинами ползуна и тем самым снизить габариты ручной машины.
Наряду с этим, в ручной машине между рычагами установлена пружина растяжения.
Такое выполнение ручной машины еще больше сокращает ее длинновые габариты, так как отсутствие между проушинами ползуна пружины позволяет сделать расстояние между ними минимальным, зависящим только от ширины взаимного зацепления элементов зацепления блока зацепления и ответных элементов зацепления. Это как раз такое расстояние, на которое происходит сдвиг ведущей проушины одного из рычагов внутри расстояния между проушинами ползуна.
Наряду с этим, в ручной машине ведущие проушины рычагов примыкают к проушинам ползуна с их внешней стороны, а между рычагами установлена пружина растяжения.
Такое выполнение ручной машины в еще большей степени позволяет сократить длинновые габариты устройства осевого сдвига блока зацепления и ручной машины в целом. Здесь между проушинами ползуна отсутствуют ведущие проушины рычагов и сама пружина, а расстояние между проушинами ползуна может быть минимальным и зависящим от одного фактора - легкости передвижения ползуна под действием эксцентрика вдоль штанги, без перекосов и заеданий в опорах (в данном случае проушинах самого ползуна).
Конкретное выполнение предлагаемого изобретения поясняется описанием и чертежами, на которых:
Фиг. 1 изображает ручную машину в продольном разрезе по оси ведомого вала.
Фиг. 2 изображает ручную машину в поперечном разрезе по промежуточному валу, устройству сдвига блока зацепления и ведомому валу.
Фиг. 3 изображает ручную машину в продольном разрезе по промежуточному валу и устройству сдвига блока зацепления с пружиной сжатия, с блоком зацепления в первом крайнем осевом положении.
Фиг. 3' изображает ручную машину в продольном разрезе в момент перевода блока зацепления во второе крайнее осевое положение, когда ряд элементов зацепления блока зацепления еще не вошел в зацепление с соответствующими ответными элементами зацепления. Положение ручки управления соответствует второму крайнему осевому положению блока зацепления.
Фиг. 3'' изображает ручную машину в продольном разрезе в момент, когда элементы зацепления блока зацепления находятся в состоянии зацепления с соответствующими ответными элементами зацепления. Положение ручки управления соответствует второму крайнему осевому положению блока зацепления.
Фиг. 4 изображает ручную машину в продольном разрезе с видом на устройство сдвига блока зацепления с пружиной кручения.
Фиг. 5 изображает вид на расположение пружины кручения в плане.
Фиг. 6 изображает ручную машину в продольном разрезе с видом на устройство сдвига блока зацепления с пружиной растяжения.
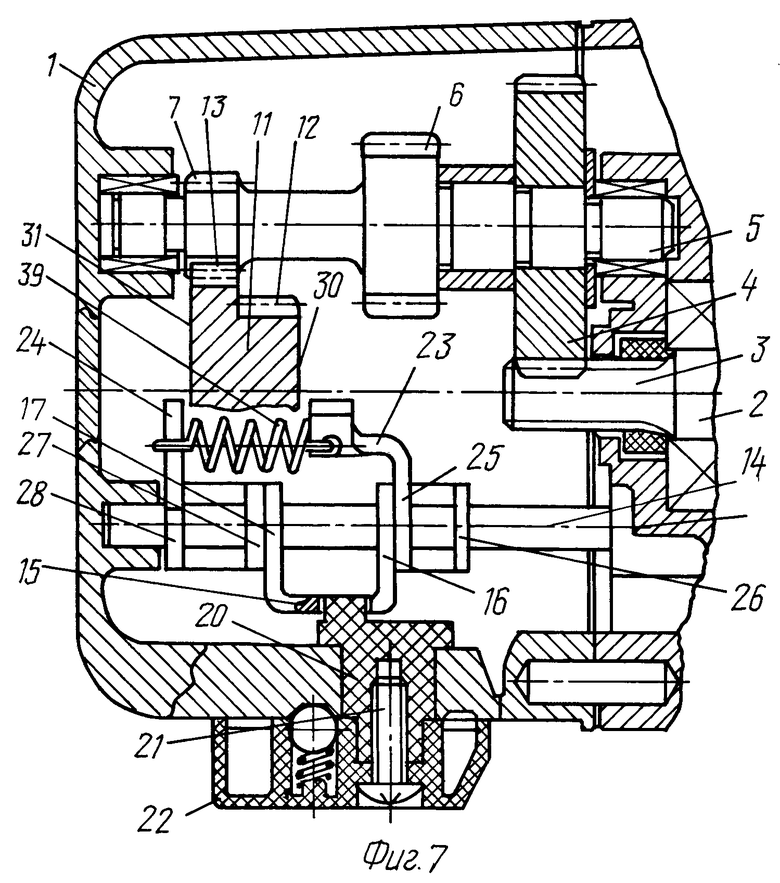
Фиг. 7 изображает ручную машину в продольном разрезе с видом на устройство сдвига блока зацепления с пружиной растяжения, а рычаги расположены с внешней стороны ползуна.
Ручная машина вращательного действия содержит (фиг. 1) корпус 1, привод вращения 2, вал-шестерня 3 которого кинематически связана с ответной шестерней 4 (фиг. 3) промежуточного вала 5, две группы ответных элементов зацепления 6 и 7, выполненных в виде двух сменных шестерен с большим и меньшим количеством зубьев соответственно, кинемaтически в радиальном направления связывающих промежуточный вал 5 с ведомым валом 8 (фиг. 1), выполненным в виде шпинделя, на резьбе 9 которого закрепляют сверлильный патрон (на чертеже не показан). На шпинделе 8 установлен свободно в осевом направлении и кинематически связанный с помощью шлицевого зацепления 10 в радиальном блок зацепления 11, имеющий две группы элементов зацепления 12 и 13, выполненных в виде шестерен с соответственно меньшим и большим количеством зубьев, для зацепления со сменными шестернями 6 и 7 (фиг. 3) промежуточного вала 5 в первом и втором крайних осевых положениях блока зацепления 11.
В корпусе (фиг. 2) параллельно оси ведомого вала 8 установлена штанга 14, на которой свободно в осевом направлении установлен ползун 15 с помощью проушин 16 и 17 (фиг. 3). В ползуне 15 выполнен паз 18 (фиг. 1), в котором размещен шип 19 эксцентрика 20 (фиг. 3), который соединен винтом 21 с ручкой управления 22, установленной в корпусе 1.
На штанге также установлено устройство осевого сдвига блока зацепления, состоящее из правого рычага 23 и левого рычага 24. Правый рычаг 23 установлен на штанге 14 с помощью ведущей проушины 25 и опорной проушины 26. Левый рычаг 24 установлен на штанге 14 с помощью ведущей проушины 27 и опорной проушины 28. При этом ведущие проушины 25 и 27 расположены между проушинами 16, 17 ползуна 15 и примыкают к ним с их внутренней стороны. Между ведущими проушинами 25 и 27 установлена пружина сжатия 29 так, что ее действие направлено на сближение рычагов 23 и 24. Рычаги 23 и 24 охватывают блок зацепления с его противоположных сторон 30 и 31.
В корпусе 1 выполнены углубления 32, 33, в которых при повороте ручки управления 22 размещается шарик 34, установленный в ручке управления 22 и подпружиненный пружиной 35, для фиксации ручки управления 22 в ее крайних положениях.
В другом варианте (фиг. 4) между ведущими проушинами 25, 27 установлена пружина кручения 36 так, что ее концы 37, 38 оказывают давление на ведущие проушины 25, 27.
В следующем варианте (фиг. 6) рычаги 23 и 24 связаны между собой пружиной растяжения 39.
В третьем варианте (фиг. 7) рычаги 23, 24 установлены с противоположных сторон ползуна 15 так, что рычаг 23 установлен на штанге 14 с помощью опорной проушины 26 и ведущей проушины 25, которая примыкает к проушине 16 ползуна 15 с внешней стороны, а рычаг 24 установлен на штанге 14 с помощью опорной проушины 28 и ведущей проушины 27, примыкающей с внешней стороны к проушине 17 ползуна 15. При этом рычаги 23 и 24 связаны пружиной растяжения 39.
Ручная машина работает следующим образом. В первом своем крайнем осевом положении блок зацепления 11 (фиг. 1), первой группой элементов зацепления 13, выполненной в виде шестерни с большим числом зубьев, сцеплен с группой ответных элементов зацепления 7 (фиг. 3), выполненных в виде шестерни, установленной на промежуточном валу 5. В этом положении блока зацепления 11 ручная машина находится в режиме, при котором обеспечена меньшая скоростъ вращения ведомого вала 8. В этом положении блок зацепления 11 удерживается рычагами 23, 24, положение которых, в свою очередь, обеспечивается крайним левым положением шипа 19 эксцентрика 20, а вместе с ним и положением ползуна 15. Положение рычагов 23, 24 относительно ползуна 15 обеспечивается с помощью ведущих проушин 25, 27, которые прижаты к проушинам 16, 17 ползуна 15 к их внутренней стороне пружиной сжатия 29. Опорные проушины 26 и 28 рычагов 23, 24 расположены за пределами габаритов ползуна 15.
Разнесение ведущий проушины 25, 27 и опорной проушины 26, 28 каждого из рычагов 23, 24 соответственно обеспечивает свободное без перекосов и заеданий осевой сдвиг рычагов 23, 24 вслед за ползуном 15.
Перевод ручной машины на второй режим работы производится путем поворота ручки управления 22, а вместе с ней и эксцентрика 20 на угол 180o. Ползун 15 при этом передвигается с помощью шипа 19 вдоль штанги 14 на расстояние удвоенного эксцентриситета расположения шипа 19 относительно оси вращения эксцентрика 20 в корпусе 1. Этого расстояния достаточно, чтобы блок зацепления 11 вышел из состояния зацепления, создаваемого первым рядом элементов зацепления 13 с ответными элементами зацепления 7 и вошел в зацепление вторым рядом элементов зацепления 12 с ответными элементами зацепления 6 (фиг. 3''). Осевой сдвиг блока зацепления 11 осуществляется (фиг. 1) с помощью рычага 24, который, передвигаясь по штанге 14 вместе с ползуном 15, толкает блок зацепления 11 со стороны 31. Блок зацепления 11 при этом продвигается вдоль ведомого вала 8 по шлицевому соединению 10. Если блок зацепления 11 при своем осевом сдвиге не вошел в зацепление с ответными элементами зацепления 6 (фиг. 3') и остановился, упираясь своей боковой стороной 30 в торцевую поверхность ответных элементов зацепления 6, рычаг 24 и вместе с ним ведущая проушина 27 тоже остановились, а ползун 15, тем не менее, продолжает осевой сдвиг по штанге 14, сжимая пружину 29 своей проушиной 17 через ведущую проушину 25 рычага 23, до момента, когда он займет свое второе крайнее положение, соответствующее второму режиму работы. При этом ручка управления 22 совершает поворот на 180o и фиксируется в этом положении шариком 34, который попадает в углубление 33 и удерживается в нем пружиной 35. Второй режим работы в ручной машине осуществляется автоматически при включении привода вращения 2. Вращение вал-шестерни 3 привода 2 передается через ответную шестерню 4 на промежуточный вал 5, а вместе с ним и на сменную шестерню 6. Как только зубья сменной шестерни 6 устанавливаются напротив впадин шестерни 12 блока зацепления 11 под действием сжатой пружины 29, ведущая проушина 27, а вместе с ней рычаг 24 перемещают блок зацепления 11 в его второе крайнее положение до тех пор, пока ведущая проушина 27 не дойдет до проушины 16 ползуна 15. Учитывая, что количество зубьев сменной шестерни 6 больше, чем шестерни 7, во втором крайнем осевом положении блока зацепления 11 обеспечивается второй режим, при котором коэффициент редукции пары шестерен 6, 12 меньше, чем у пары шестерен 7, 13, а поэтому скорость вращения ведомого вала 8 больше, чем в первом режиме. Аналогичным образом осуществляется перевод ручной машины из второго режима в первый путем поворота ручки управления 22 в обратном направлении на угол 180o. В процессе переключения ручной машины в первый режим из второго последовательно участвуют: ответные элементы зацепления 7 в виде сменной шестерни, ряд элементов зацепления 13, выполненных в виде шестерни блока зацепления 11, рычаг 23, его ведущая проушина 25, пружина сжатия 29, ведущая проушина 27 рычага 24, проушина 16 ползуна 15, сам ползун 15, шип 19 эксцентрика 20 через паз 18 и ручка управления 22.
Длинновые габариты такой ручной машины во многом определяются величиной необходимого осевого сдвига блока зацепления 11 и длинновыми габаритами устройства осевого сдвига блока зацепления 11. При этом длинновые габариты устройства осевого сдвига зависят от расстояния между проушинами 16, 17 ползуна 15, куда входит толщина ведущих проушин 25, 27, суммарная высота сжатой до соприкосновения витков пружины сжатия 29 и половина общего осевого сдвига блока зацепления. И чем больше количество витков пружины сжатия 29, тем больше длинновые габариты устройства осевого сдвига и ручной машины в целом.
Длинновые габариты ручной машины уменьшаются в другом варианте исполнения (фиг. 4), где роль пружины сжатия выполняет пружина кручения 36. При этом опорные концы 37, 38 пружины кручения 36 могут состоять из одного опорного витка каждый, и общая высота двух витков намного меньше, чем высота многовитковой пружины сжатия 29, чем и достигается уменьшение расстояния между проушинами 16, 17 ползуна 15 и всего устройства сдвига.
В следующем варианте исполнения ручной машины длинновые габариты устройства сдвига еще больше снижаются, если усилие, направленное на сближение рычагов 23 и 24, создается пружиной растяжения 39, установленной непосредственно между рычагами 23, 24 (фиг.6) так, что между ведущими проушинами 25, 27 пружина сжатия 29 отсутствует. В этом случае минимально необходимое расстояние между проушинами 16, 17 ползуна 15 еще больше уменьшается, что приводит к снижению длинновых габаритов ручной машины в целом.
В другом варианте исполнения ручной машины ее длинновые габариты еще более снижаются за счет того, что ведущие проушины 25, 27 рычагов 23, 24 установлены на штанге 14 за пределами габаритов ползуна 15, примыкая к его проушинам 16, 17 с их внешней стороны. В этом случае между проушинами 16, 17 ползуна 15 отсутствуют какие-либо конструктивные элементы и расстояние между ними определяется только легкостью (без перекосов и заеданий) передвижения ползуна 15 вдоль штанги 14. Расстояние между ведущей проушиной 25, 27 и опорной проушиной 26, 28 рычагов 23, 24 соответственно может быть также минимальным и определяется теми же соображениями - легкостью передвижения рычагов 23, 24 вдоль штанги 14.
Таким образом, выполнение устройства осевого сдвига блока зацепления 11 из двух рычагов 23, 24, охватывающих блок зацепления 11 с противоположных сторон 30, 31 и подпружиненных так, что действие пружины направлено на сближение рычагов 23, 24 между собой, каждый из рычагов 23, 24 связан со штангой 14 ведущей проушиной 25, 27 и опорной проушиной 26, 28, а ведущие проушины 25, 27 рычагов 23, 24 примыкают к проушинам 16, 17 ползуна 15, позволяет значительно сократить длинновые габариты ручной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНО-ВРАЩАТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2200816C2 |
| УДАРНО-ВРАЩАТЕЛЬНАЯ МАШИНА | 2004 |
|
RU2272118C1 |
| РУЧНАЯ МАШИНА | 1999 |
|
RU2174895C2 |
| ЭЛЕКТРОИНСТРУМЕНТ С ПРЕДОХРАНИТЕЛЬНОЙ МУФТОЙ | 2001 |
|
RU2203441C2 |
| ПЕРФОРАТОР ИЛИ МОЛОТОК | 2002 |
|
RU2246394C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ БУРА В УДАРНО-ВРАЩАТЕЛЬНОЙ МАШИНЕ | 1996 |
|
RU2141892C1 |
| УДАРНАЯ МАШИНА | 2003 |
|
RU2244621C1 |
| УДАРНАЯ МАШИНА | 2005 |
|
RU2288835C2 |
| КОМПРЕССИОННО-ВАКУУМНАЯ УДАРНАЯ МАШИНА | 1999 |
|
RU2170658C2 |
| ТРАНСПОРТНЫЙ УНИВЕРСАЛЬНЫЙ ВАРИАТОР АВТОМАТИЧЕСКОГО ДЕЙСТВИЯ "ТРАНСУНВАРТОР-АВТОМАТ" | 1992 |
|
RU2047023C1 |







Изобретение относится к области машиностроения, в частности к электрическим ручным перфораторам и сверлильным машинам, применяемым в строительстве, в геологоразведочных и буровзрывных работах. Ручная машина вращательного или ударно-вращательного действия содержит корпус, привод вращения с промежуточным валом, кинематически связанным с ведомым валом, блок зацепления с двумя группами элементов зацепления, входящими в ответные элементы зацепления в своих крайних осевых положениях, который установлен на ведомом валу свободно в осевом направлении и кинематически связан с ним в радиальном. В корпусе машины установлена штанга, на которой свободно в осевом направлении установлен с помощью проушин ползун. Последний выполнен с пазом для размещения шипа эксцентрика ручки управления, расположенной в упомянутом корпусе и имеющей возможность переключения по меньшей мере на два режима работы. Устройство осевого сдвига блока зацепления ручной машины выполнено в виде двух рычагов, охватывающих последний с противоположных сторон. Рычаги подпружинены из условия их сближения между собой. Каждый рычаг имеет ведущую и опорные проушины, связанные со штангой, а ведущие проушины обоих рычагов примкнуты к проушинам ползуна. Такое выполнение ручной машины позволяет значительно сократить ее длинновые габариты. 3 з.п. ф-лы, 9 ил.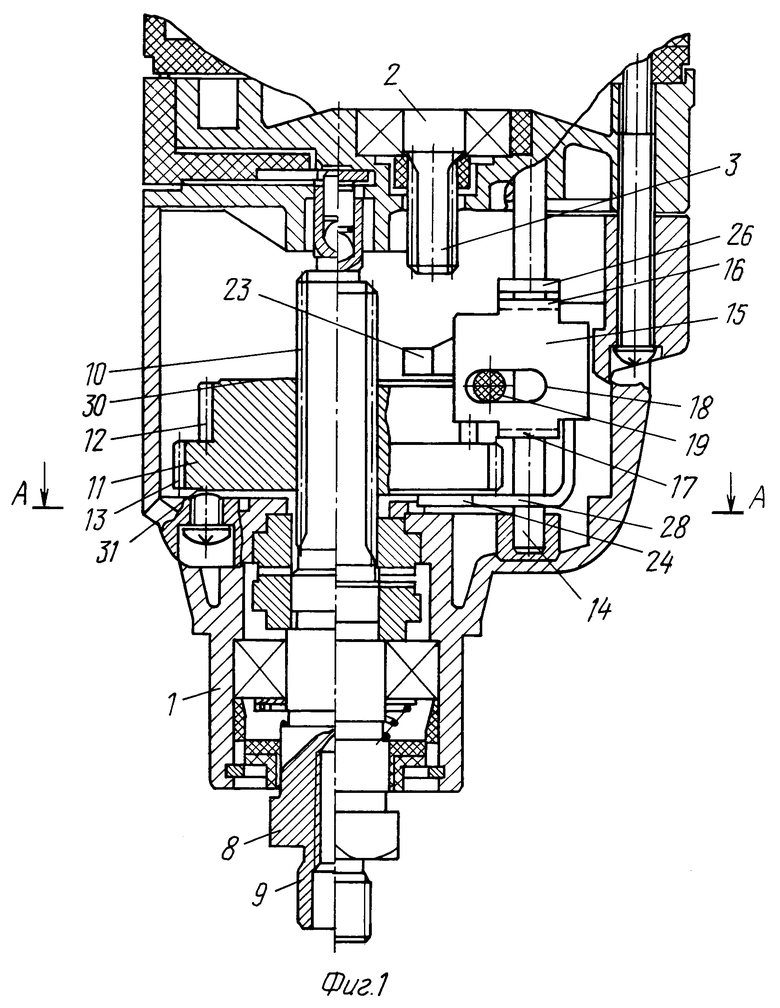
| Каталог фирмы "ELMOS", 1997, с.8 | |||
| Ударная электродрель | |||
| мод | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Устройство для обработки прерываний | 1985 |
|
SU1280632A2 |
| Устройство для провертывания зерна в силосах | 1934 |
|
SU40261A1 |
| DE 3311263 A1, 04.10.1984 | |||
| Устройство для переключения передач | 1982 |
|
SU1073514A1 |
| КОРОБКА ПЕРЕДАЧ С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 1991 |
|
RU2019773C1 |

