Предложение относится к области летательных аппаратов тяжелее воздуха и может быть использовано при реализации способов и устройств для создания тяги летательного аппарата, обеспечивающих его вертикальный взлет, перемещение в пространстве и посадку без использования специальных взлетно-посадочных полос или каких-либо пусковых установок.
Известен ряд способов и устройств для создания силы тяги или подъемной силы, основывающихся на образовании перепада давления на поверхностях аппарата. Например, известен способ по заявке Франции [1], заключающийся в придании вращения ротору, содержащему рельефные элементы, которые расширяются, проходят радиально от центра к периферии и имеют ширину наклонных передних 2 поверхностей меньше ширины наклонных задних 3 поверхностей. На роторе по его периферии установлен ободок. Подъемная сила создается при вращении ротора за счет особенностей вихревого обтекания верхней и нижней поверхности ребер ротора.
Известен летательный аппарат и способ совершения полета [2].
Летательный аппарат 20 тяжелее воздуха содержит аэродинамический профиль 22 с верхней поверхностью, на которую направлено несколько струй текучей среды. Летательный аппарат может содержать несколько основных двигателей 54, создающих струи текучей среды. Набор высоты и горизонтальный полет могут регулироваться путем управления струями, выходящими из двигателей 54. Кроме того, летательный аппарат 20 может содержать дополнительные двигатели 58, которые облегчают горизонтальный полет, и двигатели 56 управления рысканием летательного аппарата. Двигатели 54, 56, 58 не имеют подвижных частей, а аэродинамический профиль 22 не содержит каких-либо частей, подвижных в обтекающем воздушном потоке.
В известном транспортном средстве для передвижения в воздухе и воде [3], подъемная сила и тяга создаются посредством агрегата, содержащего два вращающихся диска, разделенных неподвижным третьим диском. Диски снабжены рычагами, углублениями и другими приспособлениями для направления воздушных или водяных масс. Последние захватываются верхним и нижним вращающимися дисками, движение которым сообщается двигателями. В случае опасности они защищаются крюками, ведение которых осуществляется средним диском. Кроме указанного агрегата с дисками, предусмотрены приводные вспомогательные кольца. Для изменения курса на вращающихся дисках установлены управляющие затворы. Средство содержит специальные выхлопные трубы для глушения шума в виде пояса, а также жесткие посадочные стойки с приспособлениями для бурения. В системе самоснабжения предусмотрены электродвигатели, причем вращающиеся диски приводят в движение генераторы.
Известны устройство и способ получения тяги [4], в которой описан аппарат вертикального взлета и посадки для перемещения в любой среде, обеспечивающий любое изменение направления полета и имеющий вид тора с центральным размещением транспортных капсул. Аппарат выполнен в виде кольцеобразных оболочек, расположенных одна над другой или одна внутри другой. Оболочки расположены концентрично с промежутком между ними и вращаются вокруг центральной оси. Каждая оболочка содержит компрессорные 1 и турбинные 2 лопатки, расположенные рядом на кольце и связанные сепараторным кольцом 4 и опорными кольцами. Предусмотрены один или несколько энергетических агрегатов, которые приводят в действие оболочки. Устойчивость вращения аппарата относительно центральной оси поддерживается автоматически с помощью тормозной установки 14 с электронным управлением, имеющейся на оболочках с противоположным направлением вращения, или посредством сопел, или посредством выступающего элемента, создающего опорный вращающий момент.
К недостаткам таких устройств следует отнести большие энергозатраты, связанные с быстрым вращением оболочек, а также сложность из-за необходимости компенсирующих моментов вращения на транспортных капсулах.
Известен реактивный привод без вращающихся элементов, в котором тяга создается тем, что истечение газообразных продуктов сгорания осуществляется непосредственно над кольцевой несущей поверхностью [5].
Известен термодипольный способ получения тяги и осуществления полета, а также устройство, реализующее этот способ [6].
Способ заключается в создании перепада давления в окружающей среде между сторонами аппарата, причем на внешней поверхности одной стороны аппарата создают исток теплоты, а на внешней поверхности другой стороны аппарата создают сток теплоты. Сток и исток создают перекачкой теплоты через аппарат от одной половины его внешней поверхности к другой.
Устройство, реализующее этот способ, содержит наружную теплопроводную оболочку в виде осесимметричного тела вращения и размещенный в полости устройства (аппарата) источник энергии.
К недостаткам такого способа получения тяги и устройства, реализующего этот способ, можно отнести невысокую эффективность преобразования электрической энергии в энергию движения аппарата из-за значительной инерционности тепловых потоков и существенных потерь энергии в процессе преобразования электрической энергии в тепловую, а затем - в кинетическую энергию движения аппарата.
Наиболее близким аналогом предложения является "Электроракетный двигатель Богданова" по заявке RU 94010387, A1, МПК 6 F 03 H 5/00, содержащий корпус аэродинамически обтекаемой формы, сплюснутый со стороны торцов, источник ионизирующего излучения, ускоритель заряженных частиц, систему электропитания, катушку, выполняемую с возможностью создания магнитного поля вне корпуса, а также электроды, установленные на поверхности корпуса группами симметрично относительно условий плоскости, в которой лежит ось катушки. Группы электрически разделены линией пересечения плоскости с поверхностью корпуса, причем электроды выполнены с возможностью создания электрических полей, имеющих составляющую, перпендикулярную силовым линиям катушки вне корпуса, и электроизолированными друг от друга.
Электроды изготовлены не цельнопроводящими, в состоящими из многих мелких электроизолированных друг от друга сегментов, имеющих индивидуальный подвод электроэнергии.
Электроды образуют четыре группы: две верхние группы и две нижние, разделенные на четыре симметричные сектора вертикальной плоскостью, проходящей через центральную ось корпуса, и перпендикулярной ей плоскостью, проходящей через самую широкую часть корпуса. Группы изолированы друг от друга материалом, сохраняющим свойства изолятора при высоких температурах с большой работой выхода, например, нитридом бора.
Между электродами установлены источники ионизирующего излучения и ускорители заряженных частиц. Выходные окна и тех и других выполнены в виде поверхностей вращения, образующих кольца, соосные катушке. В качестве ускорителей заряженных частиц могут быть использованы микротрон и изохронный циклотрон, выполненные с накладками из ферромагнитного материала в нижней и в верхней части двигателя, изменяющими магнитное поле катушки с целью наиболее выгодного его использования для ускорения заряженных частиц. Оси ускорителей совпадают с осью катушки. Ускорители снабжены фокусирующей системой электродов, выполненной с возможностью направлять ускоренные заряженные частицы раздельно или в заданный участок впереди двигателя или вокруг двигателя. Выходные окна ускорителя заряженных частиц, ускоряющего электроны, расположенные в передней части двигателя, выполнены с возможностью переводить значительную часть энергии электронов в жесткое рентгеновское излучение. В носовой части двигателя расположен носовой источник ионизирующего излучения.
В качестве электроизоляционного материала, разделяющего сегменты и электроды, используются диэлектрики, сохраняющие изолирующие свойства при высокой температуре и, одновременно, способные к термоавтоэлектронной эмиссии, то есть обладающие малой работой выхода, например, оксид кальция.
Катушка выполнена сверхпроводящей, с возможностью коммутации запасенной магнитной энергии в систему электропитания и с возможностью усиливать магнитное поле вне корпуса около межэлектродного зазора за счет ферромагнитного экрана.
Полезный груз, например, экипаж летательного аппарата, располагается внутри магнитного экрана.
Температурный режим для обеспечения сверхпроводящего состояния катушки поддерживается гелиевым криостатом.
По катушке циркулирует незатухающий ток и создает магнитное поле вне корпуса двигателя.
Группами электродов по обе стороны от продольной изолирующей полосы создаются симметрично противоположные электрические поля.
Источники ионизирующего излучения и ускорители заряженных частиц ионизируют газ атмосферы вне корпуса в области межэлектродных зазоров. Под действием приложенного напряжения в этих зазорах происходит электрический пробой и вспыхивают электрические дуги. Подавая раздельно и взаимно согласованно, тактами в определенной последовательности напряжения на сегменты и электроды, заполняют дугами значительное пространство в газе атмосферы около корпуса. На мощный электрический ток дуг воздействует магнитное поле катушки и силой Ампера ускоряет перемещение дуг в направлении вращения вокруг оси. При этом направления вращения дуг с левой и правой стороны двигателя противоположны, в результате чего вращающиеся в разные стороны массы газа сталкиваются за кормовой частью двигателя и устремляются от него, создавая тягу.
Таким образом, вихревое течение на верхней и нижней поверхности двигателя не формируется. Есть лишь попеременное (тактовое) поворачивающее перемещение силовым полем сверхпроводящей катушки объемных зарядов то у левого верхнего и правого нижнего, то у правого верхнего и левого нижнего секторов двигателя в направлении от носа к корме относительно продольной вертикальной плоскости, обеспечивающее в основном зарядовую составляющую тяги.
Вес сверхпроводящей катушки вместе с криостатом в значительной мере определяет вес двигателя и всего аппарата. Для обеспечения достаточно высокого коэффициента полезного действия этот вес по расчетам автора должен быть в пределах тысяч и даже десятков тысяч тонн.
Несмотря на открывающиеся пути конструкторских решений использование такого предложения на современном этапе связано со значительными технологическими и экономическими проблемами, определяемыми сложностью изготовления сверхпроводящей катушки и самого летательного аппарата таких огромных размеров.
Факторами, определяющими силу тяги такого двигателя, являются:
- силы Ампера, характеризующиеся взаимодействием магнитного поля катушки с объемными зарядами ионизованного газа сверху и снизу корпуса и имеющие суммарную составляющую по направлению движения (перпендикулярную вертикальной оси двигателя);
- повышение давления (pк) за задней (кормовой) частью корпуса двигателя в результате столкновения и последующего отброса назад разгоняемых потоков ионизованного газа над (и под) правыми и левыми секторами двигателя;
- силовое взаимодействие между противоположно заряженными передней (носовой) частью корпуса и объемным зарядом ионизованного газа впереди корпуса, эквивалентное падению давления на носовой поверхности (pн).
Два последних фактора определяют перепад давления между кормовой и носовой поверхностями корпуса двигателя, который создает дополнительную составляющую силы тяги R того же направления, что и первый фактор.
При этом следует отметить, что повышение тяги за счет второго и третьего факторов определяется не только величиной перепада давления на кормовой (Sк) и носовой (Sн) поверхности двигателя, но и размерами этих поверхностей, так как
при Sк=Sн=10 кв.м и перепаде давления всего в 0,01 атм = (pк-pн)•Sк=100000 кв.см• 0,01 кг/кв.см=1000 кг
= (pк-pн)•Sк=100000 кв.см• 0,01 кг/кв.см=1000 кг
Очевидно, что предпочтительнее создавать перепад давления на противоположных сторонах аппарата, имеющих максимальную площадь поверхности, так как в этом случае при незначительном перепаде давления можно получить большую тягу. Традиционный путь повышения тяги за счет увеличения давления (в камере сгорания ракетного двигателя) конструктивно и технологически представляется более сложным.
Техническим результатом предложения является упрощение реализации способа получения тяги и упрощение конструкции при снижении веса двигателя.
Для достижения указанного результата в способе получения тяги, предназначенном для осесимметричного тела вращения и включающем ионизацию газа на верхней и нижней поверхностях тела путем создания вблизи этих поверхностей с помощью электрических разрядов ионов и воздействия на ионы электрическим или магнитным полем для создания перепада давлений ионизированного газа между верхней и нижней поверхностью, создают в процессе последовательных электрических разрядов вдоль спиралей множество ионных пучков, которые предназначены для формирования под воздействием электрического или магнитного поля над верхней поверхностью тела центробежного вихревого потока ионизированного газа и под нижней поверхностью тела встречного центростремительного вихревого потока ионизированного газа так, что частицы центробежного вихревого потока взаимодействуют с верхней поверхностью тела, а частицы центростремительного вихревого потока взаимодействуют с нижней поверхностью тела.
В устройстве для получения тяги, содержащем корпус аппарата в виде осесимметричного тела вращения, ограниченный верхней выпуклой и нижней вогнутой токонепроводящими оболочками с установленными на них электродами электрических разрядников, высоковольтный источник питания, полеобразующую систему, ионизирующие облучатели электрических разрядников, указанные электроды электрических разрядников установлены последовательно один за другим с образованием множества спиральных дорожек, закрученных относительно вертикальной оси аппарата, полеобразующая система имеет источники электрического или магнитного поля, установленные с боков разрядников, электроды на верхней оболочке предназначены для формирования центробежного вихревого потока ионизированного газа, а электроды на нижней оболочке предназначены для формирования центростремительного вихревого потока ионизированного газа.
При этом каждый из источников электрического поля выполнен в виде токопроводящей пластины, подключенной к источнику питания.
В другом варианте каждый из источников магнитного поля образован полюсом намагниченной пластины.
Таким образом, поток заряженных частиц над верхней выпуклой поверхностью корпуса образует центробежное вихревое (нисходящее по спиралям) течение относительно вертикальной оси аппарата. Каждая заряженная частицы в таком потоке, образующем объемный заряд над корпусом аппарата, имеет тангенциальную составляющую скорости и составляющую в радиальной плоскости, проходящей через вертикальную ось корпуса. За счет притяжения электрическим (или магнитным) полем полеобразующей системы эта частица отклоняется, получая ускорение, и вектор ее составляющей скорости в радиальной вертикальной плоскости, а соответственно, и вектор ее количества движения в этой плоскости больше отклоняется вниз. Равнодействующая моментов количества движения всех заряженных частиц (т. е. всего объемного заряда), проектируемая на вертикальную ось, дает величину силового взаимодействия с корпусом двигателя, который в результате получает момент количества движения противоположного знака. Этот, сообщаемый объемным зарядом двигателю, момент количества движения в значительной мере определяет первую (верхнюю) составляющую тяги. Аналогичное, но с вращением в противоположном направлении, т.е. центростремительное вихревое (восходящее по спиралям) течение формируется и под нижней вогнутой поверхностью корпуса, в результате чего двигатель получает вторую (нижнюю) составляющую тяги того же направления.
Следовательно, в отличие от электроракетного двигателя Богданова, в предложении перепад давления создается не в продольном направлении между поверхностями минимальных размеров, а в вертикальном - между наибольшими по величине нижней и верхней поверхностями двигателя с корпусом осесиметричной формы.
Так как реальный процесс вихревого обтекания верхней и нижней поверхностей двигателя намного сложнее и не ограничивается лишь зарядовым взаимодействием объемных зарядов с силовым полем корпуса, в вихревые потоки вовлекаются и электроны, и частицы с зарядом противоположного знака, и нейтральные молекулы газа атмосферы. Однако, несмотря на частичное уменьшение из-за этого составляющей тяги от зарядового взаимодействия, произойдет увеличение суммарной тяги за счет существенного роста ее аэродинамической составляющей благодаря вихревому обтеканию верхней выпуклой и нижней вогнутой поверхностей корпуса двигателя газовыми потоками со всеми их составляющими фракциями.
При образовании объемных зарядов у верхней и нижней поверхности двигателя превалирующую роль должны выполнять положительно заряженные ионы азота, доля которого в воздухе земной атмосферы составляет более 78%.
Известно, что ион как заряженная частица имеет массу (даже наиболее легкого водорода) в 1840 раз больше массы электрона. При этом давление, создаваемое ионами в разряде, например, в электрической искре, может достигать сотен атмосфер.
Положительный ион имеет кинетическую и потенциальную энергию. Полная энергия иона
Под действием электрического поля E ион приобретает скорость
где κ - среднее значение доли кинетической энергии, теряемой при одном столкновении; - время свободного пробега иона (пороговое значение E/p=32 в/см. мм.рт.ст.);
- время свободного пробега иона (пороговое значение E/p=32 в/см. мм.рт.ст.); - проходимый за один свободный пробег путь в направлении электрического поля;
- проходимый за один свободный пробег путь в направлении электрического поля;
k - подвижность иона (k=v/E); - средняя длина свободного пробега, при давлении p.
- средняя длина свободного пробега, при давлении p.
Приближенно в сильных полях скорость иона:
При наличии электрического поля  на ион массой m действует сила
на ион массой m действует сила
которая сообщает ему ускорение вдоль силовых линий поля
где заряд электрона e = -4,8•10 ед. СГСq=-1,6•10 Кл.
В случае воздействия на ион дополнительно магнитного поля  , вектор напряженности которого направлен параллельно поверхности корпуса и перпендикулярно вектору скорости иона, на него действует сила Лоренца, направленная по нормали к поверхности аппарата
, вектор напряженности которого направлен параллельно поверхности корпуса и перпендикулярно вектору скорости иона, на него действует сила Лоренца, направленная по нормали к поверхности аппарата
Эта сила должна уравновешиваться центробежной силой, т.е.

откуда радиус кривизны траектории иона [7] .
.
Так как масса положительного иона азота в (14х1840) раз, т.е. примерно в 25,8 тыс. раз больше массы электрона, то, соответственно, во столько же раз будет больше и радиус кривизны траектории иона. В результате при одной и той же плотности среды, напряженности электрического и магнитного поля и при одинаковой удаленности точки образования иона от корпуса ион пробегает по сравнению с электроном большее расстояние (больше и длина свободного пробега) до момента его вероятного столкновения с поверхностью корпуса (или до удаления от корпуса на расстояние, при котором взаимодействие с полем практически исчезает). Большему участку траектории соответствует и больший отрезок времени, в течение которого на ион действует сила Лоренца, а следовательно, больше будет и импульс воздействия этой силы.
Результирующий импульс силы со стороны суммарного ионизованного вихревого потока на корпус аппарата зависит от напряженности электрического поля в разрядных промежутках (т.е. от средней скорости разгона ионов в потоке), от напряженности поперечного электрического или магнитного поля (мощности полеобразующей системы), от концентрации и массы составляющих поток ионов.
Для повышения концентрации ионов и, соответственно, плотности ионизованного потока на разрядники воздействуют излучением, стимулирующим ионизацию в областях разряда, например, ультрафиолетовым, рентгеновским, лазерным или гамма-излучением.
Вихревые потоки с высокой концентрацией заряженных частиц создают в виде совокупности множественных ионных пучков в процессе последовательных упорядоченных электрических разрядов вдоль спиралей. Концентрация ионов в пучке может быть существенно увеличена за счет создания ионизационных волн, например, в виде быстро движущихся страт в разрядных промежутках [8]. Суммарное воздействие таких ионизованных потоков в единицу времени зависит от скорости распространения ионизационных волн.
Скорость распространения фронта ионизационной волны [9]
где Tе - температура электронов перед фронтом волны;
μe - их подвижность;
εи - энергия ионизации; - характерное значение напряженности электрического поля.
- характерное значение напряженности электрического поля.
Обеспечение электродинамического взаимодействия ионизованных вихревых потоков с корпусом аппарата и, таким образом, получение перепада давления на его поверхностях осуществляют воздействием на ионизованные потоки поперечными электрическими или магнитными силовыми полями соответствующей полярности: на верхней поверхности полями, осуществляющими притяжение ионов, а на нижней поверхности аппарата - полями, осуществляющими отталкивание ионов потока.
Наибольший перепад давления на аппарате обеспечивается формированием на одной из поверхностей центробежно-вихревого потока, а на противоположной поверхности - центростремительно-вихревого потока положительных ионов (подобно тому, как создается тяга при формировании вихревых воздушных потоков за счет вращения в противоположных направлениях аксиальных оболочек с компрессорными и турбинными лопатками [4]).
Таким образом, силовое действие на аппарат закрученного ионизованного потока складывается из двух основных составляющих:
- аэродинамической, обусловленной особенностями обтекания вихревым потоком спрофилированных по предложенной форме поверхностей корпуса;
- электродинамической, обусловленной воздействием суммарного заряда потока на корпус аппарата через его силовые поля.
Величина тяги регулируется путем изменения напряженности электрического или магнитного поля разрядников, например: форсированный режим тяги обеспечивается в процессе формирования искровых разрядов, а номинальный режим - при тихих разрядах (коронных, кистевых и т.п.).
Изменение направления вектора тяги производится за счет изменения соотношения величины напряженности электрического (или магнитного) поля на диаметрально противоположных разрядниках.
Для уяснения сущности предложения представлены чертежи, где:
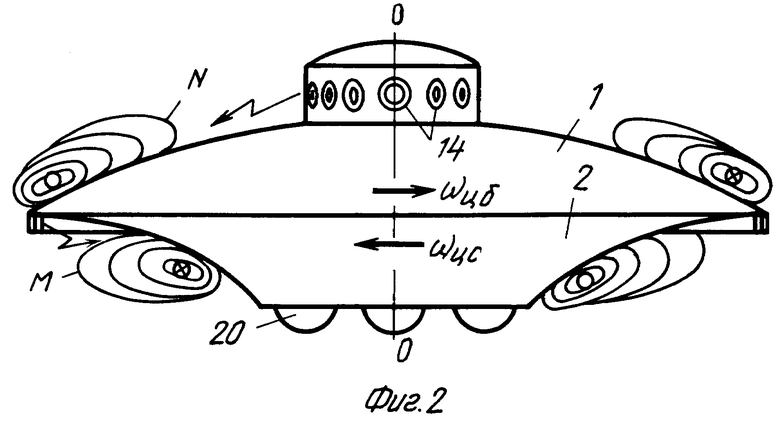
- на фигурах 1, 2 и 3 - вид устройства, соответственно, снизу, сбоку и сверху;
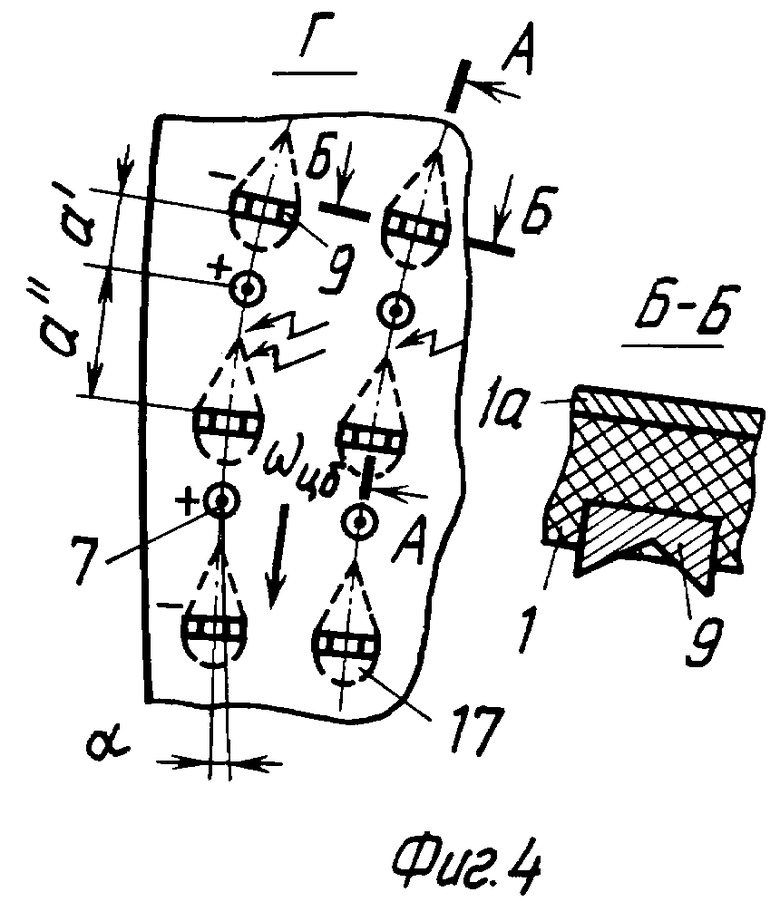
- на фиг. 4 - вид на элемент I верхней поверхности аппарата;
- на фиг. 5 - вид на элемент II нижней поверхности аппарата;
- на фиг. 6 - вид на элемент I верхней поверхности в варианте с магнитной полеобразующей системой;
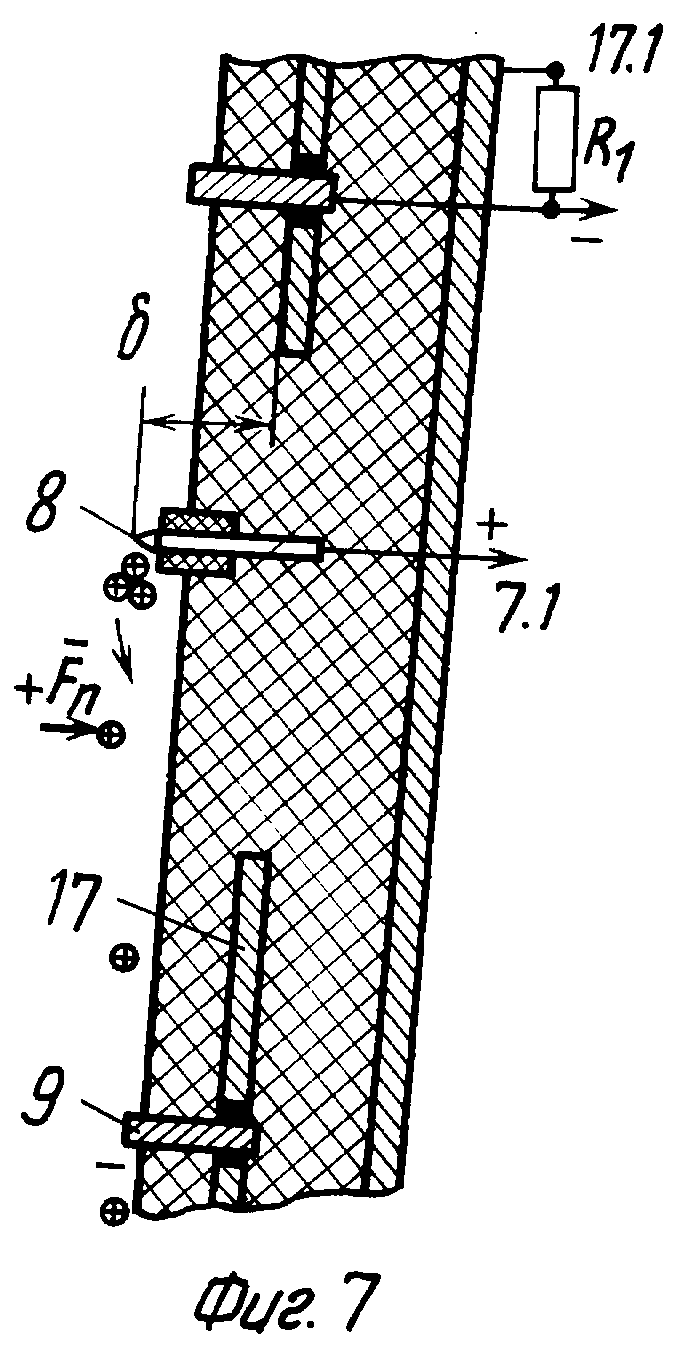
- на фиг. 7 - разрез A-A верхней поверхности;
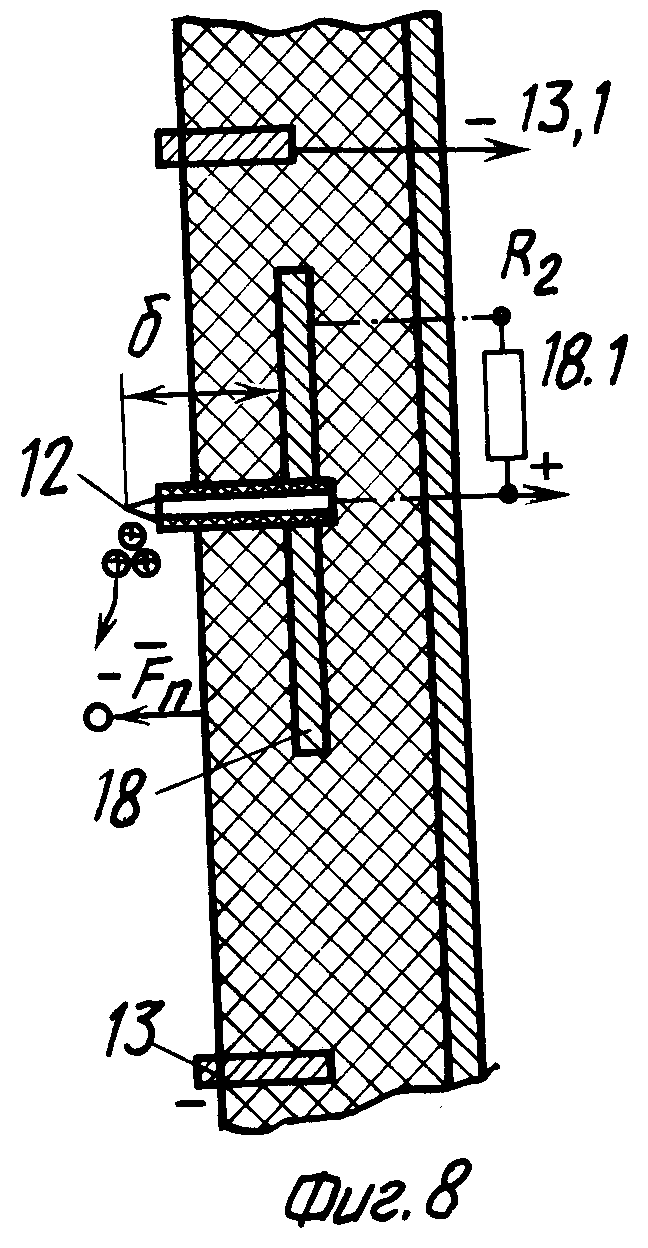
- на фиг. 8 - разрез B-B нижней поверхности;
- на фиг. 9 - вид на элемент I верхней поверхности с магнитами;
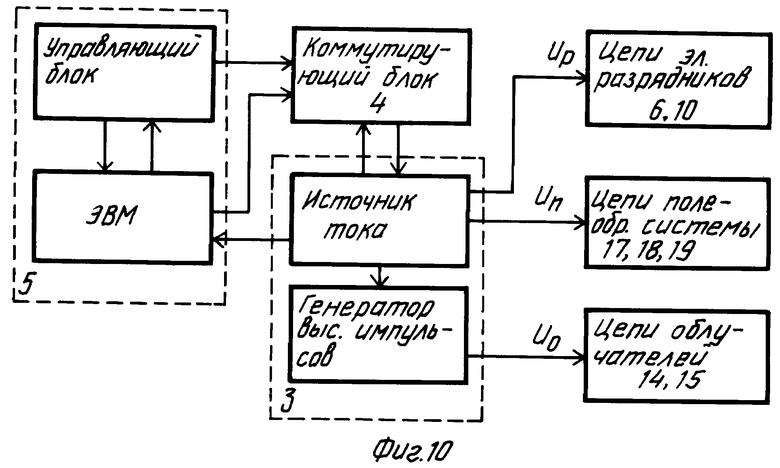
- на фиг. 10 - блок-схема устройства.
Устройство, в котором реализуется предложенный способ получения тяги, содержит полый корпус в виде осесимметричного тела вращения, который образован верхней выпуклой оболочкой 1 (или 1 и 1а) и нижней вогнутой оболочкой 2, имеющей выгнутую в сторону центральной оси образующую криволинейной поверхности.
Верхняя и нижняя оболочки со стороны внешней поверхности имеют электроизолирующий слой или же полностью выполнены из электроизолирующего материала.
В полости корпуса размещены источник питания 3, коммутирующий блок 4 и управляющий блок 5, включающий бортовую ЭВМ для расчета траекторных параметров и сигналов управления.
Источник питания 3 включает высоковольтный источник тока, генератор высоковольтных импульсов.
На внешней поверхности верхней оболочки 1 установлены электрические разрядники 6, включающие полярные отрицательные электроды 7 с зарядообразовательными наконечниками 8 и положительные электроды 9 в виде пластин с выступами, расположенных напротив наконечников 8.
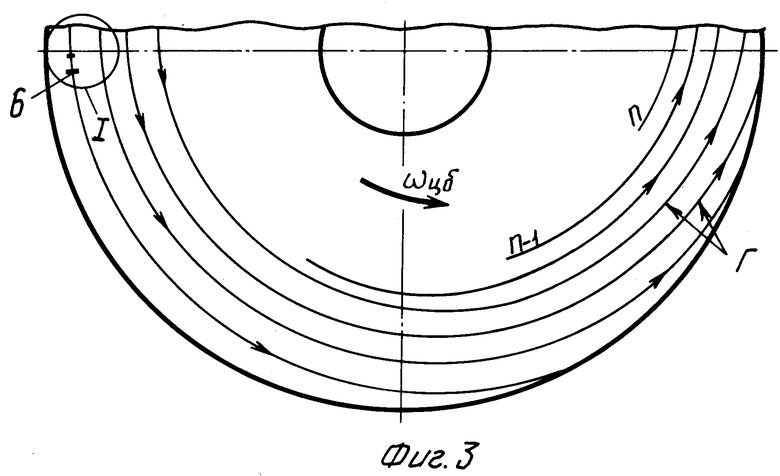
Положительные электроды 9 и зарядообразовательные наконечники 8 установлены, чередуясь друг с другом и образуя спиральные дорожки Г, закрученные вокруг центральной оси 0-0 аппарата.
Множество таких дорожек покрывают большую часть верхней поверхности аппарата.
Направленное движение ионов от центра к периферии вдоль каждой спиральной дорожки определяется заданной последовательностью разрядов по цепочке разрядников и ориентацией острия зарядообразующих электродов по направлению движения ионнизованного потока таким образом, что каждый разрядный промежуток а'' расположен под углом α к касательной к концентричной окружности, очерченной из точки на центральной оси 0-0 аппарата и проходящей через острие наконечника 8.
Этим обеспечивается формирование суммарного потока положительных ионов по направлению развертывания спирали, т.е. формирование ионизованного центробежно-вихревого потока (по стрелке ωцб).
На внешней поверхности нижней оболочки 2 установлены электрические разрядники 10, включающие отрицательные электроды 11 с зарядообразовательными наконечниками 12 и положительные электроды 13 в виде пластин с выступами, расположенных напротив наконечников 12.
Положительные электроды 13 и зарядообразовательные наконечники 12 установлены, чередуясь, вдоль спиралей Д, закрученных вокруг центральной оси 0-0. Этим образуются цепочки последовательностей разрядов вдоль каждой из дорожек, вместе формирующих ионизованный центростремительно-вихревой поток (по стрелке ωцс).
Полярные электроды 7, 9 и 11, 13 объединены в группы, предназначенные для подключения через блоки коммутации к соответствующим полюсам высоковольтного источника тока.
На корпусе установлены лазерные облучатели 14 и 15 для стимулирования ионизации в электрических разрядниках. Облучатели работают в импульсном режиме, чем достигается более эффективное и экономичное использование энергии бортового источника питания. Каждая головка облучателей установлена таким образом, что радиальная плоскость ее излучения проходит через зарядообразующие электроды всех находящихся на этом направлении разрядников каждой из n-спиральных дорожек на верхней оболочке и, соответственно, каждой из m-спиральных дорожек на нижней оболочке. Порядок работы разрядников обеспечивается последовательностью (по кольцу головок) импульсного облучения зарядообразующих электродов.
В другом варианте головки облучателей выполнены с возможностью вращения вокруг центральной оси аппарата и работают в режиме сканирования n- и m - групп зарядообразующих электродов.
На верхней и нижней оболочках корпуса под областями разрядов размещены пластины 17 и 18 электрических полюсов полеобразующей системы.
При этом вершины наконечников 8, 12 отстоят от поверхности полюсов на фиксированном расстоянии 6, определяемом из условия максимального взаимодействия поля полеобразующей системы с ионами в области разряда.
В варианте полеобразующей системы с магнитными полюсами (фиг. 6) магниты 19 установлены с боков разрядников таким образом, что вектор магнитного поля расположен параллельно поверхности и перпендикулярно вектору электрического поля  . При этом поля взаимодействуют с ионным потоком по такому же принципу, как и в системе с электростатическими полями: под действием сил Лоренца ионный поток как объемный заряд на верхней поверхности испытывает притяжение к ней, а на нижней поверхности - отталкивание.
. При этом поля взаимодействуют с ионным потоком по такому же принципу, как и в системе с электростатическими полями: под действием сил Лоренца ионный поток как объемный заряд на верхней поверхности испытывает притяжение к ней, а на нижней поверхности - отталкивание.
Со стороны нижней поверхности аппарат имеет упругие опоры 20 для уменьшения динамических нагрузок в момент приземления.
Для изменения режима тяги и(или) направления вектора тяги, т.е. направления движения аппарата, блок управления 5 включает бортовую ЭВМ, которая рассчитывает и выдает на блоки коммутации соответствующие команды на изменение на всей поверхности (при изменении режима тяги) или на выбранном секторе по крайней мере одной из поверхностей аппарата (при изменении направления суммарного вектора тяги) одного или совокупности нескольких параметров:
- напряжения на электродах разрядников;
- интенсивности излучения облучателей;
- мощности полеобразующей системы.
Устройство функционирует в нескольких режимах.
1 режим (минимальной тяги)
По команде с блока управления 3 коммутирующий блок 4 подключает зарядообразующие электроды 7, 11 к отрицательному полюсу высоковольтного источника тока, а электроды 9, 13 и входы 17.1, 18.1 - к положительному полюсу. При этом подается напряжение Uр в цепи разрядников (меньшее необходимого для самостоятельного разряда), создающее электрическое поле  , и Uп в цепи полеобразующих систем на верхней и нижней поверхностях аппарата, создающее электрическое поле
, и Uп в цепи полеобразующих систем на верхней и нижней поверхностях аппарата, создающее электрическое поле  . Это состояние соответствует положению готовности аппарата к движению. По команде подается импульсное напряжение Uо в цепи облучателей. При этом напряжение на зарядообразующих контактах оказывается достаточным для образования заряженных частиц - электронов и отрицательных ионов и протекания процесса самостоятельных таких разрядов. Заряженные частицы движутся вдоль электрического поля
. Это состояние соответствует положению готовности аппарата к движению. По команде подается импульсное напряжение Uо в цепи облучателей. При этом напряжение на зарядообразующих контактах оказывается достаточным для образования заряженных частиц - электронов и отрицательных ионов и протекания процесса самостоятельных таких разрядов. Заряженные частицы движутся вдоль электрического поля  . Совокупность всех последовательных разрядов, обусловивших общую массу движущихся в электрических полях
. Совокупность всех последовательных разрядов, обусловивших общую массу движущихся в электрических полях  заряженных частиц на всех спиральных дорожках, образует на верхней поверхности аппарата центробежно-вихревой поток N, а на нижней поверхности - центростремительно-вихревой поток M. Под действием электрического нормального к поверхности оболочек поля
заряженных частиц на всех спиральных дорожках, образует на верхней поверхности аппарата центробежно-вихревой поток N, а на нижней поверхности - центростремительно-вихревой поток M. Под действием электрического нормального к поверхности оболочек поля  заряженные частицы в потоке N испытывают притяжение к поверхности 1, а под действием поля
заряженные частицы в потоке N испытывают притяжение к поверхности 1, а под действием поля  заряженные частицы в потоке M отталкиваются от поверхности. В результате такого взаимодействия электрических полей с потоками заряженных частиц возникает подъемная сила (сила тяги), величина которой возрастает за счет дополнительной аэродинамической составляющей, которая образуется при обтекании центробежно-вихревым и центростремительно-вихревым потоками корпуса аппарата, имеющего предложенную форму профиля.
заряженные частицы в потоке M отталкиваются от поверхности. В результате такого взаимодействия электрических полей с потоками заряженных частиц возникает подъемная сила (сила тяги), величина которой возрастает за счет дополнительной аэродинамической составляющей, которая образуется при обтекании центробежно-вихревым и центростремительно-вихревым потоками корпуса аппарата, имеющего предложенную форму профиля.
2 режим (максимальной тяги)
В отличие от первого при втором режиме напряжение Uр на разрядниках увеличивают до значения, достаточного для процесса искровых разрядов (при действии ионизирующего облучения).
3 режим
Использование этого варианта получения тяги целесообразно в атмосфере с преобладанием атомов, образующих в процессе ионизации положительные ионы. Так, в земной атмосфере преобладает азот, атомы которого при ионизации теряют электроны и образуют положительные ионы (хотя в общем воздух из-за наличия кислорода является электроотрицательным).
В этом режиме зарядообразовательные электроды 7, 11 подключают к положительному полюсу источника питания, а электроды 9, 13 - к отрицательному полюсу. Электроды 17 полеобразующей системы верхней оболочки 1 имеют отрицательный потенциал относительно зарядообразующих электродов (соединены через сопротивление R1 с отрицательным полюсом источника питания), а электроды 18 полеобразующей системы нижней оболочки 2 находятся под положительным потенциалом относительно зарядообразующих электродов.
При достижении под действием ионизирующих облучателей 14, 15 порогового потенциала на остриях 8, 12 зарядообразующих электродов образуются положительные ионы, которые под действием электрического поля  движутся в сторону электродов 9 и 13. При входе в зону действия поперечного электрического (или магнитного, см. фиг. 6, 9) поля
движутся в сторону электродов 9 и 13. При входе в зону действия поперечного электрического (или магнитного, см. фиг. 6, 9) поля  на положительный ион на верхней поверхности действует сила
на положительный ион на верхней поверхности действует сила  , направленная по нормали к поверхности, а на положительный ион на нижней поверхности действует сила
, направленная по нормали к поверхности, а на положительный ион на нижней поверхности действует сила  , направленная по нормали от поверхности. Часть положительных ионов, достигая отрицательных электродов, теряет заряд, а часть ионов проскакивает электроды 9, 13 (в зону а) и оказывается в области а следующего по пути движения ионообразующего электрода.
, направленная по нормали от поверхности. Часть положительных ионов, достигая отрицательных электродов, теряет заряд, а часть ионов проскакивает электроды 9, 13 (в зону а) и оказывается в области а следующего по пути движения ионообразующего электрода.
Возникшая вследствие этого совокупность всех последовательных разрядов, обусловивших общую массу движущихся в электрических полях  заряженных частиц на всех спиральных дорожках также образует на верхней поверхности аппарата центробежно-вихревой поток N, движущийся со скоростью ωцб, а на нижней поверхности - центростремительно-вихревой поток M, движущийся со скоростью ωцс. Под действием нормального к поверхности оболочек силового электрического (или параллельного поверхности магнитного) поля
заряженных частиц на всех спиральных дорожках также образует на верхней поверхности аппарата центробежно-вихревой поток N, движущийся со скоростью ωцб, а на нижней поверхности - центростремительно-вихревой поток M, движущийся со скоростью ωцс. Под действием нормального к поверхности оболочек силового электрического (или параллельного поверхности магнитного) поля  заряженные частицы в потоке N испытывают силовое воздействие
заряженные частицы в потоке N испытывают силовое воздействие  в направлении к поверхности 1, а под действием поля
в направлении к поверхности 1, а под действием поля  заряженные частицы в потоке M отталкиваются от поверхности под действием силы
заряженные частицы в потоке M отталкиваются от поверхности под действием силы  . В результате такого взаимодействия электрических полей с потоками заряженных частиц возникают пондеромоторные силы, определяющие подъемную силу (силу тяги), величина которой возрастает за счет дополнительной аэродинамической составляющей, которая образуется при обтекании центробежно-вихревым и центростремительно-вихревым потоками корпуса аппарата, имеющего предложенную форму профиля.
. В результате такого взаимодействия электрических полей с потоками заряженных частиц возникают пондеромоторные силы, определяющие подъемную силу (силу тяги), величина которой возрастает за счет дополнительной аэродинамической составляющей, которая образуется при обтекании центробежно-вихревым и центростремительно-вихревым потоками корпуса аппарата, имеющего предложенную форму профиля.
При достаточно высокой напряженности электрического поля  в разрядных промежутках образуются движущиеся с большими скоростями ионизационные волны (страты), отличающиеся высокой концентрацией ионов во фронтах этих волн. В результате увеличения плотности ионов в вихревых потоках растет и их суммарный заряд, а потому увеличиваются и электродинамические силы взаимодействия ионизованных потоков с силовыми полями аппарата.
в разрядных промежутках образуются движущиеся с большими скоростями ионизационные волны (страты), отличающиеся высокой концентрацией ионов во фронтах этих волн. В результате увеличения плотности ионов в вихревых потоках растет и их суммарный заряд, а потому увеличиваются и электродинамические силы взаимодействия ионизованных потоков с силовыми полями аппарата.
Сверхбыстрое (с околосветовыми скоростями) движение ионизационных волн вдоль вихревых потоков по существу равносильно сверхбыстрому вращению окружающей среды вокруг аппарата. В соответствии с известным в ТРИЗе (Теории решения изобретательских задач) принципом "НАОБОРОТ", это равноценно сверхбыстрому вращению аппарата в относительно неподвижной среде, в результате чего возникает антигравитационный эффект.
Изменение режимов тяги обеспечивается путем изменения электрических параметров, определяющих процессы разрядов и характеристики вихревых ионизованных потоков (напряженности электрических и силовых полей полеобразующих систем, интенсивности ионизирующего излучения и знака потенциала на зарядообразующих электродах, которые целесообразнее располагать остриями по направлению потоков).
Управление пространственным положением вектора тяги, т.е. направлением полета, производится путем изменения вышеуказанных параметров на разрядниках в соответствующем секторе на одной, например, нижней поверхности аппарата.
Промышленная применимость предложения подтверждена апробацией положенных в его основу известных решений, выявленных в использованных источниках информации.
Использованные источники информации
1. Заявка Франции 2604683, МКИ 4 B 64 C 11/00, публ. 08.04.88 г.
2. Заявка PCT N 86/04874, публ. 28.08.86, МКИ 4 B 64 C 39/06.
3. Патент ГДР N 271498 (публ. 06.09.89 г., МКИ 4 B 64 G 1/00).
4. Заявка ЕПВ N 0304614, МКИ 4 B 64 C 39/00 (публ. 01.03.89 г.).
5. Заявка ФРГ N 3807648, МКИ 4 B 64 C 29/04 (публ. 17.11.88 г.).
6. Патент РФ 2131378, B 64 C 23/00, з. 95116794/28 от 02.10.95 г.
7. А.И. Борисенко, Газовая динамика двигателей, Оборонгиз, М., 1962.
8. А.В. Недопасов, "Страты", УФН, 1968 г., т. 94, с. 439.
9. Физическая энциклопедия, М., Научное издательство "Большая Российская энциклопедия", 1994 г., т. 2, с. 209; т. 4, с. 87-90.
10. Патент РФ 2134220, 6 B 64 G 1/40, 1,26.
11. Заявка РФ 94010387, F 03 H 5/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВАЯ МАШИНА | 1999 |
|
RU2163973C1 |
| ЭЛЕКТРОРАКЕТНЫЙ ДВИГАТЕЛЬ БОГДАНОВА | 1992 |
|
RU2046210C1 |
| Ионный ракетный двигатель космического аппарата | 2018 |
|
RU2682962C1 |
| Прямоточный релятивистский двигатель | 2020 |
|
RU2776324C1 |
| Способ создания электрореактивной тяги | 2016 |
|
RU2635951C1 |
| ПЛАЗМЕННО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2099572C1 |
| Летательный аппарат | 2016 |
|
RU2640380C1 |
| Вихревой пылеуловитель | 1986 |
|
SU1407565A1 |
| СПОСОБ СОЗДАНИЯ РЕАКТИВНОЙ ТЯГИ И РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1997 |
|
RU2169854C2 |
| ТРАНСПОРТНЫЙ АППАРАТ | 1990 |
|
RU2017658C1 |



Изобретение относится к области реактивных движителей для летательных аппаратов тяжелее воздуха. Способ включает ионизацию газа на верхней и нижней поверхностях осесимметричного тела путем создания вблизи этих поверхностей с помощью электрических разрядов ионов и воздействия на ионы электрическим или магнитным полем для создания перепада давлений ионизированного газа между верхней и нижней поверхностями. В процессе последовательных электрических разрядов создают в форме спиралей множество ионных пучков, которые предназначены для формирования под воздействием электрического или магнитного поля над верхней поверхностью тела центробежного вихревого потока ионизированного газа и под нижней поверхностью тела встречного центростремительного вихревого потока ионизированного газа так, что частицы центробежного вихревого потока взаимодействуют с верхней поверхностью тела, а частицы центростремительного вихревого потока взаимодействуют с нижней поверхностью тела. Устройство содержит корпус аппарата в виде осесимметричного тела вращения, ограниченный верхней выпуклой и нижней вогнутой токонепроводящими оболочками с установленными на них электродами электрических разрядников, высоковольтный источник питания, полеобразующую систему, ионизирующие облучатели электрических разрядников. Изобретение направлено на упрощение конструкции при снижении веса. 2 с. и 2 з.п. ф-лы, 10 ил.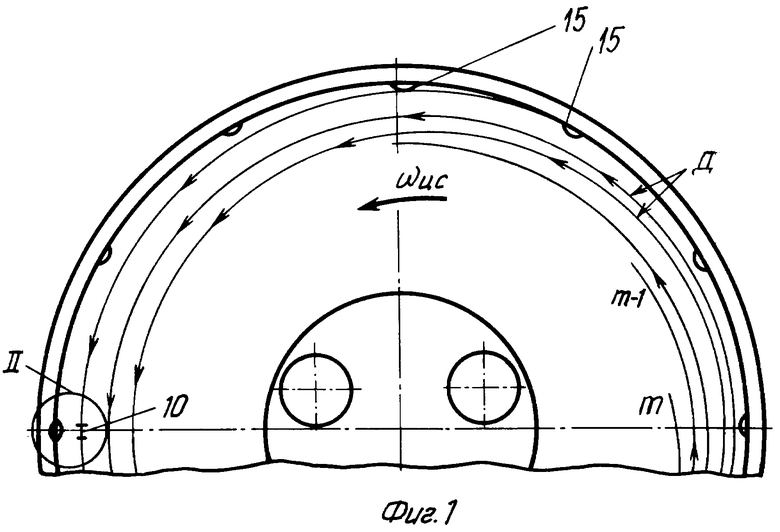
| RU 94010387 A1 20.11.1995 | |||
| ЭЛЕКТРОСТАТИЧЕСКАЯ ТЯГОВАЯ СИСТЕМА (ВАРИАНТЫ), КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) И СПОСОБ ПРИЛОЖЕНИЯ ВЫБИРАЕМЫХ ТЯГОВЫХ УСИЛИЙ (ВАРИАНТЫ) | 1998 |
|
RU2134220C1 |
| RU 2056335 C1, 20.03.1996 | |||
| US 3662554 A, 16.05.1972 | |||
| US 5291734 A, 08.03.1994 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

