Изобретения относятся к ракетной технике и могут быть использованы во вращающихся управляемых снарядах (УС) и ракетах систем высокоточного оружия с широким диапазоном изменения скорости полета (от дозвуковых до сверхзвуковых значений).
Известен артиллерийский самонаводящийся УС "Коперхэд" /1/, способ управления которым включает раскрытие четырех аэродинамических рулей при выходе УС из ствола, после чего они выполняют роль неподвижных хвостовых стабилизаторов, и приведение их в действие (угловые отклонения рулей по командам системы управления) по истечении временного интервала, вводимого в программное устройство системы управления перед выстрелом. При этом одна пара рулей обеспечивает стабилизацию УС по крену и управление по углу рыскания, а другая - управление по углу тангажа. Соответственно система управления УС имеет три рулевых привода, два из которых отклоняют кинематически независимые друг от друга рули первой пары, а третий рулевой привод обеспечивает перемещение имеющих общую ось рулей второй пары.
В связи с тем, что УС "Коперхэд" вращается при движении по стволу орудия, последующая стабилизация его положения по углу крена на траектории полета представляется нерациональной, так как это усложняет систему управления (введен специальный канал управления с дополнительным рулевым приводом для независимого отклонения рулей первой пары) и требует расхода энергии бортовых источников питания (электрического и газового).
К недостаткам УС "Коперхэд" следует отнести и выполнение его аэродинамического планера по "нормальной схеме" (расположение рулей в хвостовой части за неподвижными крыльями): суммарная подъемная сила УС снижается вследствие того, что создаваемые крыльями и рулями подъемные силы направлены в противоположные стороны. Кроме того, расположение рулевых приводов в хвостовой части обусловливает транзит электрических цепей от головки самонаведения через весь УС, в том числе и через боевую часть, что существенно усложняет достижение высокой надежности конструкции в условиях действия ствольных перегрузок, превышающих 10000 g.
Указанные недостатки могут быть устранены при выполнении вращающегося УС с аэродинамическим планером по схеме "утка" (расположение рулей в носовой части перед не подвижными хвостовыми стабилизаторами). Однако в случае использования реализованного в УС "Коперхэд" способа управления, предусматривающего одновременное раскрытие двух пар рулей, возникает проблема обеспечения устойчивости и управляемости УС.
Начальная скорость полета УС и УР современных систем высокоточного оружия достигает значений, соответствующих числу Маха М=2 и более. При стрельбе на максимальную дальность, составляющую десятки километров, скорость полета УС при встрече с целью дозвуковая (М=0,5...0,8). Поэтому выполнение требования поражения цели в интервале от минимальной (3...5 км) до максимальной дальности ставит перед разработчиками задачу обеспечения устойчивости и управляемости УС в широком диапазоне изменения скорости полета, которая не всегда может быть решена при проектировании его аэродинамического планера традиционными методами.
Для УС, выполненного по схеме "утка", потребная площадь рулей и стабилизаторов определяется с учетом их несущей способности, несущей способности корпуса и габаритных ограничений из условия обеспечения перегрузок управления, необходимых для выбора возможного промаха на управляемом участке траектории с дозвуковой скоростью полета УС. Возрастание скорости полета УС на управляемом участке траектории до сверхзвуковых значений приводит к потере устойчивости УС по причине существенного возрастания дестабилизирующего аэродинамического момента рулей из-за увеличения создаваемых ими аэродинамических сил пропорционально квадрату скорости полета.
По аналогичным причинам для УС "Коперхэд" при стрельбе на минимальную и промежуточные между максимальной и минимальной дальности применяются дополнительные уменьшенные орудийные заряды, что обеспечивает движение УС с дозвуковой скоростью на управляемом участке соответствующих траекторий полета, а следовательно, его устойчивость и управляемость. Однако применение нескольких зарядов практически исключает возможность автоматического заряжания орудия (из-за сложности осуществления), что, в свою очередь, ограничивает область применения УС "Коперхэд".
Наиболее близок к заявляемому по осуществлению и достигаемому эффекту известный способ рулевого управления ракетой с 4-мя рулями /2/, в котором один из рулей поддерживают в свободном состоянии по потоку или фиксируют под определенным углом. С помощью двух из оставшихся рулей обеспечивают движение вокруг осей тангажа, рыскания и крена, а последний руль фиксируют под нулевым углом.
Установка руля по потоку исключает его из процесса управления УС, за счет чего его аэродинамическая устойчивость может быть достигнута и в области сверхзвуковых скоростей полета. Однако это требует специального устройства, освобождающего по командам системы управления ось руля от кинематической связи с рулевым приводом, что усложняет конструкцию системы управления и УС в целом. Кроме того, лобовое сопротивление УС увеличивается за счет профильного сопротивления не участвующего в процессе управления руля, что приводит к уменьшению дальности полета.
Установка руля в любое фиксированное промежуточное положение, в том числе и нулевое, увеличивает лобовое сопротивление УС на величину суммы профильного и индуктивного сопротивления руля и создает силовое возмущение, которое должно быть компенсировано рулями, участвующими в процессе управления. Последнее требует расхода энергии бортовых источников питания и усложняет процесс управления УС.
Анализ недостатков рассмотренных способов управления показывает, что одним из рациональных технических решений, обеспечивающих аэродинамическую устойчивость УС в широком диапазоне скоростей полета, может служить последовательный ввод рулей в процесс управления за счет их раскрытия в определенных точках траектории движения УС.
В УС "Коперхэд" четыре хвостовых руля перед выстрелом удерживаются внутри корпуса замками, которые освобождают рули под действием стартового ускорения. При движении по стволу это же ускорение создает момент относительно оси складывания рулей, препятствующий их раскрытию. После выхода УС из ствола рули раскрываются под действием центробежных сил, обусловленных вращением УС, и фиксируются в раскрытом положении штифтовыми стопорами. Следовательно, функционирование данного устройства, обеспечивающего одновременное раскрытие рулей только в момент выхода УС из ствола, основано на действии ствольных перегрузок и поэтому не может быть использовано для раскрытия, например, двух из четырех рулей в произвольные моменты времени при движении УС по траектории полета.
Наиболее близко к заявляемому устройству по конструкции и достигаемому эффекту устройство управления полетом ракеты /3/, содержащее установленные на шпангоуте корпуса ракеты рулевые машины и кинематически связанные с ними аэродинамические рули с механизмами раскрытия и фиксации. В сложенном положении рули удерживаются стенками пускового контейнера ракеты. При выходе ракеты из контейнера рули раскрываются под действием пружин.
Как и в УС "Коперхэд", в этом устройстве рули раскрываются одновременно в фиксированный момент времени - при выходе ракеты из контейнера. Для реализации последовательного раскрытия рулей в нем необходимо введение специального механизма, удерживающего рули в сложенном положении и освобождающего их независимо друг от друга (или, например, попарно) в соответствии с командами системы управления.
Задача предлагаемого изобретения - обеспечение аэродинамической устойчивости и управляемости вращающегося УС в широком диапазоне скоростей полета, включая дозвуковые и сверхзвуковые скорости, что позволяет использовать при стрельбе из орудия единый заряд и, тем самым, применять УС в орудийных системах с автоматическим заряжанием.
Для решения этой задачи изменение количества рулей, участвующих в процессе управления УС, в заявляемом способе осуществляют последовательным попарным раскрытием и приведением в действие противоположных относительно продольной оси снаряда рулей. Попарное раскрытие противоположных относительно продольной оси снаряда рулей обусловлено вращением УС, при котором рули каждой пары попеременно через каждые 90o управляют движением УС по тангажу и рысканию. Последовательное раскрытие рулей обеспечивает возможность управления УС одной парой рулей в области сверхзвуковых скоростей полета, где задействование второй пары рулей приводит, по рассмотренным выше причинам, к потере устойчивости УС, и двумя парами рулей - в области дозвуковых скоростей полета на конечном участке траектории движения, что при сохранении устойчивости позволяет реализовать перегрузки управления, необходимые для устранения возможного промаха при наведении УС на цель.
Моментом раскрытия второй пары рулей в заявляемом способе выбран момент достижения определенной (критической) скорости полета, когда аэродинамической силы одной пары рулей уже недостаточно для эффективного управления УС вследствие снижения скорости, а приведение в действие второй пары рулей не нарушает его аэродинамической устойчивости. Таким образом, в заданном диапазоне дальностей полета УС можно выделить ближнюю зону со сверхзвуковой и трансзвуковой скоростью полета, в которой управление УС осуществляется одной парой рулей, и дальнюю зону, где скорость полета изменяется от сверхзвуковой до дозвуковой и последовательно задействуются две пары рулей. Значение критической скорости полета рассчитывается при проектировании аэродинамического планера и системы управления УС. В полете критическая скорость движения УС определяется либо непосредственно датчиком скорости, аналогично трубке Пито, либо опосредованно через временной интервал, вычисляемый системой управления УС, например, в зависимости от угла возвышения орудия (дальности стрельбы).
Задача устройства, реализующего заявляемый способ, - обеспечение управления вращающимся УС в широком диапазоне скоростей полета, включая дозвуковые и сверхзвуковые скорости, что достигается попарным последовательным раскрытием и приведением в действие противоположных относительно продольной оси УС рулей.
Для решения поставленной задачи в УС, содержащем корпус, установленные на шпангоуте корпуса рулевые машины и кинематически связанные с ними аэродинамические рули с механизмами раскрытия и фиксации, механизмы раскрытия и фиксации объединены для каждой пары противоположных относительно продольной оси снаряда рулей. При этом механизмы раскрытия и фиксации рулей размещены в установленных на шпангоуте валах, кинематически соединенных рычагами с рулевыми машинами, и выполнены в виде жестко связывающих валы попарно осей, в которых установлены пиропатроны, и поршней, расположенных в центральных отверстиях валов между торцами осей и задними кромками рулей. В осях выполнены каналы, сообщающие камеры пиропатронов с камерами поршней. Рули установлены на осях складывания и закреплены в сложенном положении штифтами в цапфах валов. Оси складывания рулей расположены с эксцентриситетом относительно оси валов, а задние кромки рулей расположены относительно оси валов под углом, большим угла раскрытия рулей.
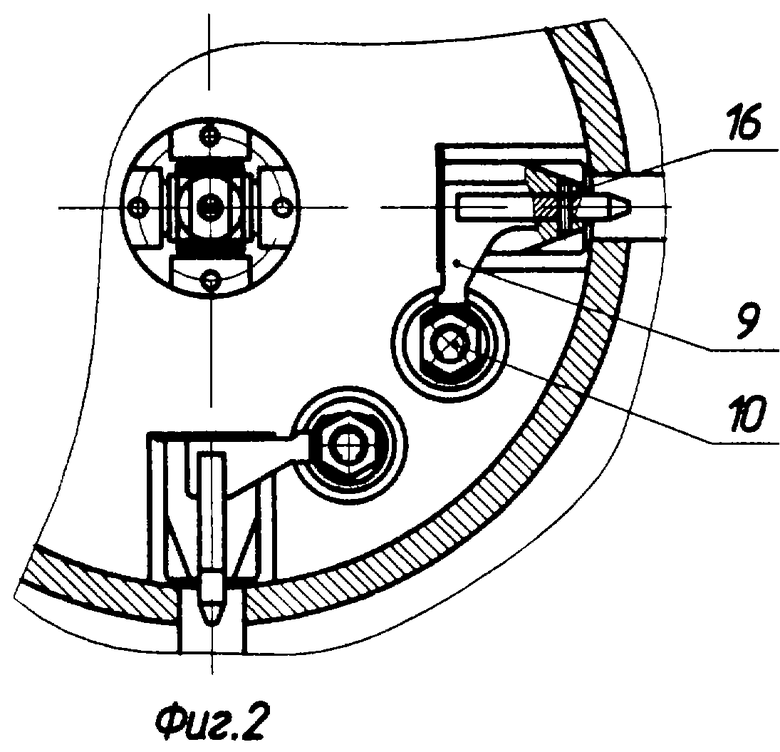
Конструкция заявляемого устройства представлена на чертежах, где на фиг. 1 приведен разрез по продольной оси УС, на котором один из рулей условно показан в раскрытом положении, а на фиг. 2 - поперечный разрез корпуса УС.
Во взаимоперпендикулярных отверстиях шпангоута 1 корпуса 2 УС размещены валы 3, в пазах цапф которых, на осях складывания 4 установлены рули 5. Валы 3 попарно жестко связаны осями 6 и 7 посредством штифтов 8 и кинематически связаны рычагами 9 с установленными на шпангоуте 1 рулевыми машинами 10. В осях 6 и 7 установлены пиропатроны 11 и 12, рабочие камеры которых отверстиями 13 и 14 (идентичные отверстия в оси 7 для камеры пиропатрона 12 находятся вне плоскости разреза, представленного на фиг. 1) сообщены с камерами поршней 15, расположенными между торцами осей 6, 7 и задними кромками рулей 5 в центральных каналах валов 3. В сложенном положении рули 5 закреплены в цапфах валов 3 срезными штифтами 16.
При подаче сигнала системы управления на раскрытие одной пары рулей первым срабатывает, например, пиропатрон 11. Из камеры пиропатрона 11 газ по отверстиям 13 и 14 попадает в камеры поршней 15. Под действием давления газа поршни 15 сообщают рулям 5 относительно их осей складывания 4 вращающий момент, обусловленный смещением (эксцентриситетом) оси складывания 4 относительно оси центрального канала вала 3, в котором расположен поршень 15. Под действием силы давления поршней 15 на рули 5 срезаются штифты 16, рули 5 поворачиваются в пазах цапф валов 3, сопровождаемые поршнями 15, до упора торцевой кромкой в поверхности цапф валов 3. В этом положении рули 5 фиксируются поршнями 15, выполняющими роль клина между поверхностью центрального канала вала 3 и задней кромкой руля 5. Фиксация обеспечивается расположением взаимодействующей с поршнем 15 задней кромки руля 5 относительно оси валов 3 под углом, большим угла раскрытия руля 5 (в сложенном положении руля 5). Передача развиваемого рулевыми машинами 10 усилия на валы 3 осуществляется посредством рычагов 9.
При подаче сигнала управления на второй пиропатрон 12 раскрытие и фиксация второй пары рулей 5 в раскрытом положении происходит аналогично. При подаче сигналов управления одновременно на пиропатроны 11 и 12 раскрытие каждой пары рулей 5 происходит независимо друг от друга.
Таким образом, в заявляемом УС обеспечивается попарное последовательное раскрытие рулей по командам системы управления, при этом не исключена возможность одновременного раскрытия двух пар рулей.
Источники информации
1. P. А. Налк, X.Л. Пастрик, Ф.А. Моррисон. Разработка полуактивной лазерной системы наведения снаряда "Коперхэд". Ракетная техника и космонавтика, т. 18, N 2, 1980, С. 128-138.
2. Способ рулевого управления ракетой с четырьмя рулями. Патент Японии N 6033996, МПК F 42 B 15/00.
3. Устройство управления полетом ракеты. Патент Франции N 2713330, МПК F 42 B 15/01.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2196295C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2004 |
|
RU2275584C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2003 |
|
RU2244897C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2000 |
|
RU2177601C1 |
| БЛОК РУЛЕВОГО ПРИВОДА АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2000 |
|
RU2175431C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ (ВАРИАНТЫ) | 2000 |
|
RU2184342C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2005 |
|
RU2289782C1 |
| ОТСЕК УПРАВЛЕНИЯ САМОНАВОДЯЩЕГОСЯ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2004 |
|
RU2265790C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
Изобретения относятся к ракетному оружию. Способ управления вращающимся снарядом заключается в изменении количества рулей управления, которое осуществляют последовательным попарным раскрытием и приведением в действие противоположных относительно продольной оси снаряда рулей при достижении снарядом определенной скорости полета. При сверхзвуковых скоростях полета управление снарядом осуществляют одной парой рулей, а при дозвуковых скоростях полета на конечном участке траектории - двумя парами рулей. Управляемый снаряд содержит корпус, на шпангоуте которого установлены рулевые машины, кинематически связанные с аэродинамическими рулями. Механизмы раскрытия и фиксации рулей объединены в пары, противоположные относительно продольной оси снаряда. При этом они размещены в установленных на шпангоуте валах, соединенных кинематически рычагами с рулевыми машинами, и выполнены в виде жестко свызывающих валы попарно осей, в которых установлены пиропатроны, и поршней, размещенных в центральных отверстиях валов между торцами осей и задними кромками рулей. В осях выполнены каналы, сообщающие камеры пиропатронов с камерами поршней. Рули установлены на осях складывания. Оси складывания рулей расположены с эксцентриситетом относительно оси валов, а задние кромки рулей расположены относительно оси валов под углом, большим угла раскрытия рулей. Попарное последовательное раскрытие рулей обеспечивает устойчивость полета снаряда на различных скоростях и повышает точность стрельбы. 2 с.п. ф-лы, 2 ил.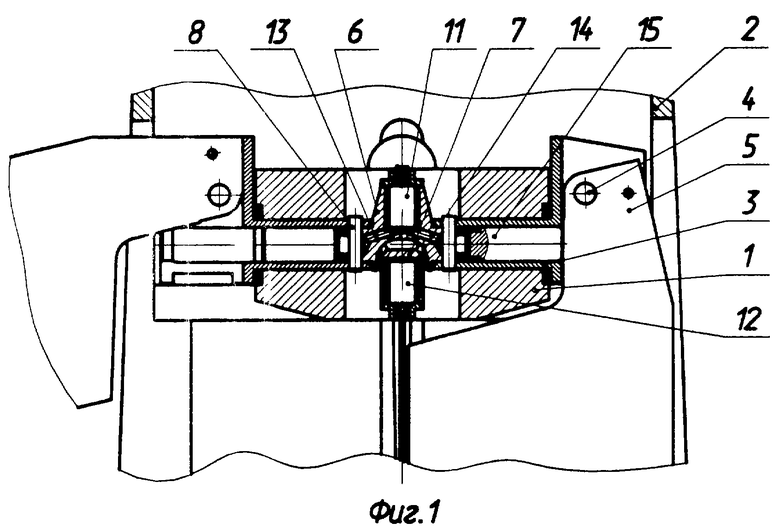
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| ПРОСТОЕ СОЕДИНЕНИЕ БАКА ДЛЯ ЖИДКОСТИ С УСТРОЙСТВОМ ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКА | 2016 |
|
RU2713330C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1995 |
|
RU2088890C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2284465C1 |
| US 5439188, 08.08.1995 | |||
| DE 4020897 А1, 09.01.1992. | |||

