Изобретение относится к области ракетостроения и может быть использовано в управляемых снарядах (УС) с релейным законом управления, при котором аэродинамические рули совершают колебательное вращательное движение.
Известна управляемая ракета [1], которая содержит корпус, крестообразно расположенные поворотные аэродинамические рули и шпангоут с размещенным на нем газовым рулевым приводом, имеющим четыре рулевых машины, каждая из которых выполнена в виде газового двигателя двухстороннего действия и кинематически связана с осью одного из аэродинамических рулей. Ракета имеет релейный закон управления, при котором каждый руль в соответствии с сигналом управления совершает колебательное вращение от упора до упора, а команда управления формируется за счет разности времен нахождения аэродинамического руля на противоположных упорах.
Однозначность нахождения руля на одном из упоров в соответствии с сигналом управления исключает необходимость использования датчика отклонения руля в системе управления ракетой с релейным законом управления. Однако при отсутствии в конструкции рулевого привода датчиков отклонения рулей возникает проблема контроля его динамических характеристик в процессе производства (при приемосдаточных и периодических испытаниях рулевого привода, а также периодических (летных) испытаниях УС).
Наиболее близок к заявляемому УС по совокупности существенных признаков и достигаемому эффекту, выбранный за прототип УС [2], содержащий корпус, шпангоут с приводными валами, выполненными с цапфами, в торцевых пазах которых с возможностью складывания в корпус шарнирно установлены аэродинамические рули. Приводные валы кинематически связаны с четырьмя рулевыми машинами, которые выполнены в виде газовых двигателей одностороннего действия, снабжены пружинами возврата аэродинамических рулей в нулевое относительно продольной оси УС положение и попарно расположены с двух сторон относительно осей приводных валов.
В данном УС реализован трехпозиционный закон управления: по командам управления каждую пару жестко связанных приводными валами аэродинамических рулей одна рулевая машина поворачивает в одну сторону, а другая - в противоположную, причем при отсутствии команды управления пружины возврата рулевых машин устанавливают аэродинамические рули в нулевое положение.
Отсутствие в конструкции рулевого привода данного УС датчиков отклонения рулей определяет ту же проблему, что и в вышеприведенном аналоге [1].
Кроме того, в раскрытом положении упор аэродинамического руля в этом УС осуществляется в торцевом пазу цапфы непосредственно в приводной вал, что обусловливает большой разброс угла стреловидности прямоугольного в плане руля в пределах технологических допусков на изготовление деталей конструкции рулевого привода. Так как от угла стреловидности такого аэродинамического руля зависит положение центра давления равнодействующей аэродинамической силы относительно оси вращения, технологический разброс угла стреловидности приводит к расширению диапазона изменения величины действующего на рулевой привод шарнирного аэродинамического момента, что, в свою очередь, вызывает разброс динамических характеристик рулевого привода и ухудшение точностных характеристик системы управления УС в целом.
Введение жестких допусков на детали конструкции с целью уменьшения разброса угла стреловидности руля при сборке, равно как и применение при сборке ручных операций (припиловка упорных поверхностей), приводят к повышению трудоемкости изготовления рулевого привода и УС в целом.
Решаемая заявляемым УС задача - обеспечение контроля динамических характеристик рулевого привода при изготовлении и летных испытаниях УС и уменьшение разброса величины угла стреловидности аэродинамических рулей в процессе его изготовления.
Решение поставленной задачи достигается тем, что в заявляемый УС, содержащий корпус с бортовыми системами, шпангоут с приводными валами, выполненными с цапфами, в торцевых пазах которых с возможностью складывания в корпус и фиксации в раскрытом положении шарнирно установлены аэродинамические рули, введены датчики отклонения рулей и печатная плата, закрепленная через изолятор на переднем торце шпангоута и соединенная посредством проводного жгута с бортовыми системами УС. При этом каждый датчик отклонения рулей выполнен из диэлектрического основания, закрепленного на переднем торце шпангоута, четырех пружинных, установленных через изолирующие прокладки на диэлектрическом основании пластин, из которых попарно внешние и попарно внутренние пластины соединены между собой и с проводниками печатной платы, и подвижного контакта, выполненного в виде диэлектрической втулки, расположенной между внутренними пластинами параллельно оси приводного вала и установленной на поводке, закрепленном на приводном валу в торцевом пазу цапфы через прокладки мерной толщины винтом, головка которого расположена с возможностью ограничения угла поворота руля в раскрытом положении. Расстояние между внутренними пластинами равно диаметру подвижного контакта, а расстояние между соседними внутренней и наружной пластинами определяет зависимость
h=L·tgδm-Δ,
где h - расстояние между соседними внутренней и наружной пластинами;
L - расстояние между осями приводного вала и подвижного контакта;
δm - максимальный угол поворота аэродинамических рулей;
Δ - запас по ходу подвижного контакта, компенсирующий неблагоприятное сочетание технологических допусков на детали конструкции.
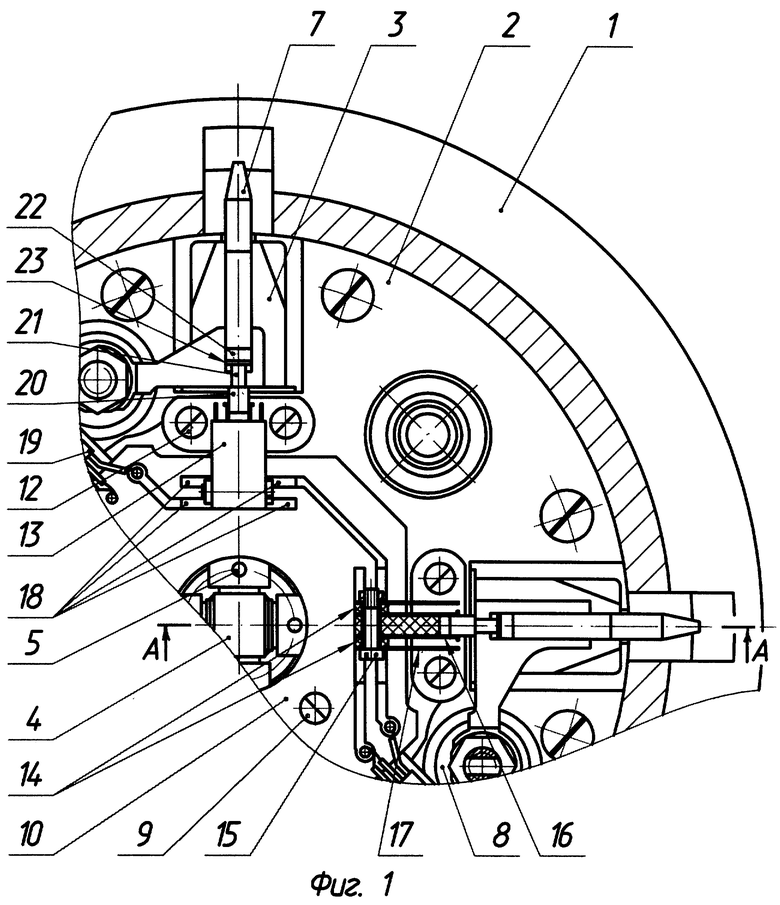
Конструкция заявляемого устройства пояснена чертежами, где на фиг.1 показан поперечный разрез УС с видом на шпангоут корпуса со стороны головной части УС, на фиг.2 - разрез А-А шпангоута по оси приводных валов (условно руль показан в раскрытом положении).
В корпусе 1 заявляемого УС закреплен шпангоут 2, в радиальных отверстиях которого установлены четыре приводных вала 3, жестко связанных попарно осями 4 посредством штифтов 5. В пазах цапф приводных валов 3 на осях складывания 6 установлены аэродинамические рули 7, раскрывающиеся через пазы в корпусе 1. Цапфы приводных валов 3 снабжены боковыми рычагами, кинематически связанными с выходными штоками рулевых машин 8.
На переднем торце шпангоута 2 винтами 9 закреплена печатная плата 10 с изолятором 11, а винтами 12 - датчики отклонения рулей 7, каждый из которых состоит из основания 13, на котором через изолирующие прокладки 14 винтом 15 закреплены четыре контакта в виде пары внутренних 16 и пары внешних 17 пружинных пластин. Пластины 16 и 17 выполнены с проводниками, которые распаяны на контактные площадки 18 платы 10, соединенные с аналогичными контактными площадками, на которые распаяны проводники жгута 19, соединяющего плату 10 с бортовыми системами УС. Подвижный контакт 20 датчика отклонения рулей выполнен в виде диэлектрической втулки, расположенной между внутренними пластинами 16 и установленной на поводке 21, который закреплен винтом 22 через прокладки 23 мерной толщины в торцевом пазу цапфы приводного вала 3. Головка винта 22 выполняет роль упора для торцевой поверхности руля 7 в его раскрытом положении, при этом передняя кромка прямоугольного в плане руля 7 имеет угол стреловидности β относительно оси приводных валов 3 (оси вращения руля 7). В раскрытом положении руль 7 стопорит фиксатор 24, который перемещает в центральном канале приводного вала 3 пружина 25.
В процессе сборки рулевого привода угол стреловидности β руля 7 выставляется при креплении поводка 21 в цапфе приводного вала 3 винтом 22 посредством набора прокладок мерной толщины 23. При этом применение набора прокладок разной толщины обеспечивает высокую точность установки угла стреловидности β.
Поворот приводного вала 3 с аэродинамическим рулем 7 рулевой машиной 8 вызывает соответствующее перемещение подвижного контакта 20, который изгибает одну из внутренних пластин 16 и замыкает ее с внешней пластиной 17 при приходе аэродинамического руля 7 на упор. Тем самым коммутируется цепь, протекание электрического тока в которой свидетельствует о нахождении аэродинамического руля 7 на одном из упоров. При возвращении аэродинамического руля 7 в нулевое положение (среднее между упорами) или при его движении на другой упор пластины 16 и 17 размыкаются (за счет пружинных свойств внутренней пластины 16) в момент отхода аэродинамического руля 7 от упора. Соответственно этот процесс повторяется при движении аэродинамического руля 7 к другому упору, а его колебательное вращение при отработке рулевым приводом релейного или периодического импульсного сигнала вызывает появление в коммутируемой цепи периодического импульсного сигнала, сопоставление которого с сигналом управления позволяет определить:
- время срабатывания рулевого привода - время от момента подачи входного сигнала на рулевую машину 8 до момента прихода рулей 7 на соответствующий упор;
- время отпускания рулевого привода - время от момента снятия входного сигнала на рулевую машину 8 до момента отхода рулей 7 с упора.
Эти временные характеристики позволяют провести оценку (контроль) динамических свойств рулевого привода как в процессе проведения его приемосдаточных (периодических) испытаний, так и при летных (периодических) испытаниях УС. В первом случае запитка коммутируемой датчиком отклонения руля цепи может осуществляться от внешнего источника электропитания, а во втором - от бортовой батареи, например, телеметрического блока УС.
Помимо электрических цепей датчиков отклонения рулей закрепленная на переднем торце шпангоута 2 печатная плата 10 может обеспечить разводку и соединение всех электрических цепей и элементов (электровоспламенители, резисторы и т. д.) рулевого привода с бортовыми системами УС проводным жгутом 19.
Изолятор 11 обеспечивает выполнение печатной платы 10 с двусторонними проводниками. Выполнение основания 13, изолирующих прокладок 14 и подвижного контакта 20 из диэлектрических материалов позволяет осуществить нужную электрическую развязку цепей датчиков отклонения рулей.
Попарное объединение внутренних 16 и внешних 17 пластин при их распайке непосредственно на плату 10 обеспечивает использование одного источника электропитания и прочность монтажа датчиков отклонения рулей, а отсутствие дополнительных проводников повышает надежность конструкции.
Расположение оси симметрии подвижного контакта 20 параллельно оси приводного вала 3 (на расстоянии L от оси приводного вала 3) - условие поступательного движения подвижного контакта 20 при вращении приводного вала 3, что необходимо для замыкания пружинных пластин 16 и 17.
Равенство расстояния между внутренними пластинами диаметру подвижного контакта способствует минимизации габаритов датчика отклонения рулей.
Рассчитываемое по вышеприведенной зависимости расстояние между соседними внутренней 16 и наружной 17 пластинами обеспечивает их гарантированное замыкание при приходе аэродинамического руля 7 на упор при всех возможных сочетаниях технологических допусков на соответствующие детали конструкции рулевого привода.
Таким образом, заявляемый УС обеспечивает контроль динамических характеристик рулевого привода при изготовлении и летных испытаниях УС за счет конструктивно простого и надежного датчика отклонения рулей, решая при этом задачу уменьшения разброса величины угла стреловидности аэродинамических рулей в процессе изготовления рулевого привода.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Способ управления ракетой и устройство для его осуществления. Патент США № 3415466, НКИ 244-3.21, 5 МПК F 42 B 15/01.
2. Управляемый снаряд и рулевая машина для него. Патент РФ № 2184927 7 МПК F 42 B 15/01.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2004 |
|
RU2275584C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2196295C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И СПОСОБ ЕГО СБОРКИ | 2007 |
|
RU2336490C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ | 2002 |
|
RU2222773C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2005 |
|
RU2289782C1 |
| ОТСЕК УПРАВЛЕНИЯ И АВТОПИЛОТНЫЙ БЛОК САМОНАВОДЯЩЕГОСЯ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2004 |
|
RU2265789C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2000 |
|
RU2177601C1 |

Изобретение относится к области вооружения, в частности к управляемым снарядам. Управляемый снаряд содержит корпус с бортовыми системами, шпангоут с приводными валами, выполненными с цапфами, в торцевых пазах которых с возможностью складывания в корпус и фиксации в раскрытом положении шарнирно установлены аэродинамические рули. Управляемый снаряд снабжен датчиками отклонения рулей и печатной платой, закрепленной через изолятор на переднем торце шпангоута и соединенной посредством проводного жгута с бортовыми системами управляемого снаряда. При использовании изобретения уменьшается разброс величины угла стреловидности аэродинамических рулей в процессе изготовления. 2 ил.
Управляемый снаряд, содержащий корпус с бортовыми системами, шпангоут с приводными валами, выполненными с цапфами, в торцевых пазах которых с возможностью складывания в корпус и фиксации в раскрытом положении шарнирно установлены аэродинамические рули, отличающийся тем, что он снабжен датчиками отклонения рулей и печатной платой, закрепленной через изолятор на переднем торце шпангоута и соединенной посредством проводного жгута с бортовыми системами управляемого снаряда, при этом каждый датчик отклонения рулей выполнен из диэлектрического основания, закрепленного на переднем торце шпангоута, четырех пружинных установленных через изолирующие прокладки на диэлектрическом основании пластин, из которых попарно внешние и попарно внутренние пластины соединены между собой и с проводниками печатной платы, и подвижного контакта, выполненного в виде диэлектрической втулки, расположенной между внутренними пластинами параллельно оси приводного вала и установленной на поводке, закрепленном на приводном валу в торцевом пазу цапфы через прокладки мерной толщины винтом, головка которого расположена с возможностью ограничения угла поворота руля в раскрытом положении, причем расстояние между внутренними пластинами равно диаметру подвижного контакта, а расстояние между соседними внутренней и наружной пластинами определяют по зависимости h=L·tgδm-Δ, где h - расстояние между соседними внутренней и наружной пластинами, L - расстояние между осями приводного вала и подвижного контакта, δm - максимальный угол поворота аэродинамических рулей, Δ - запас по ходу подвижного контакта, компенсирующий неблагоприятное сочетание технологических допусков на детали конструкции.
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2196295C1 |
| US 3415466 А, 10.12.1968 | |||
| ПРОСТОЕ СОЕДИНЕНИЕ БАКА ДЛЯ ЖИДКОСТИ С УСТРОЙСТВОМ ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКА | 2016 |
|
RU2713330C2 |

