Настоящее изобретение относится к области исследования и анализа физического состояния объектов сложной формы с помощью оптических средств, в частности к определению рельефа таких объектов, как стреляные пули и гильзы.
Стреляные пули и гильзы широко используются для идентификации огнестрельного оружия в судебной баллистике. Поверхности пуль и гильз имеют сложный рельеф и общепринятой практикой при исследовании этих поверхностей является использование набора изображений, относящихся к различным характерным признакам.
Известен способ оптического контроля поверхностей оболочек, при котором световой пучок проектируется на каждый объект на конвейере при вращении объекта вокруг собственной оси и при помощи фотоячейки регистрируются изменения отраженного света [1].
Недостатками такого способа являются низкая точность и большая трудоемкость при выявлении и идентификации дефектов рельефа сложной формы.
Известен способ проверки пуль и гильз при помощи микроскопа в судебной практике, при котором обычные средства поворачивают пули (гильзы) вокруг их продольных осей для контроля полной периферийной поверхности объектов [2]. Такой способ не позволяет получать достаточно точные изображения полного рельефа поверхностей с их характерными признаками и оказывается крайне трудоемким.
Известен способ проверки малого армейского снаряжения, такого как гильзы, пули, заключающийся в требуемой ориентации каждой гильзы, отображении особенностей на ее поверхности и сортировке гильз [3]. При вращении, например, гильзы освещаются ее боковые и головные части, а отраженный свет направляется к ПЗС для формирования видеосигналов в соответствии с поверхностными особенностями по меньшей мере одной области гильзы. Однако в отраженном свете вследствие искажений, присущих оптической системе, не могут быть достаточно точно выявлены поверхностные дефекты с рельефом относительно большой глубины, т.е. такой способ не обладает требуемой точностью для судебной баллистики.
Известен способ анализа поверхностей стреляных пуль, при котором пуля вращается таким образом, что освещается несколько ее секторов в один момент времени, а каждый кадр видеокамеры, полученный из оптических сигналов микроскопа, фиксирует полный сектор плюс перекрытие между ним и соседним сектором [4]. Степень перекрытия определяется с учетом взаимной корреляции, при этом возможно исключение перекрытия в каждом кадре. Такой способ обеспечивает автоматическое сопоставление результатов, однако ему присущи упомянутые выше недостатки, связанные с недостаточной точностью выявления глубоких следов рельефа поверхностей.
Известен способ проверки стреляных гильз, при котором с помощью соответствующей фокусировки микроскопа формируется несколько изображений при различном увеличении для различных следов на дне гильзы [5]. Оптическая система фокусируется в отдельности для получения изображений различных следов (отпечатков) на проверяемых или сравниваемых гильзах с последующей корреляцией изображений, что не позволяет получить достаточно достоверную информацию о полном рельефе, в особенности о рельефе дна гильзы. Таким образом, затрудняется выявление границ характерных рельефных признаков (например, след бойка), используемых для идентификации. На практике глубина следа от бойка весьма значительна и часто превосходит глубину резкости оптической системы. Соответственно, стенки следа от бойка (фиг. 1), на которых отображаются важные для идентификации признаки, значительно удалены от предметной плоскости и изображение стенок не оптимально по резкости. Все это снижает точность определения рельефа для последующей идентификации различных характерных следов.
Кроме того, известен способ определения профилей поверхностей, при котором поперечное сечение или профиль определяются по освещенности объекта при сканировании последнего камерой [6]. Несмотря на использование итеративных методик для определения количественных параметров и, следовательно, повышения скорости точного определения положений объектов, и этому способу присущи упомянутые выше недостатки, связанные в первую очередь с недостаточной точностью из-за возможной расфокусировки и искажений оптической системы при получении изображений профилей сложной формы с глубоким рельефом.
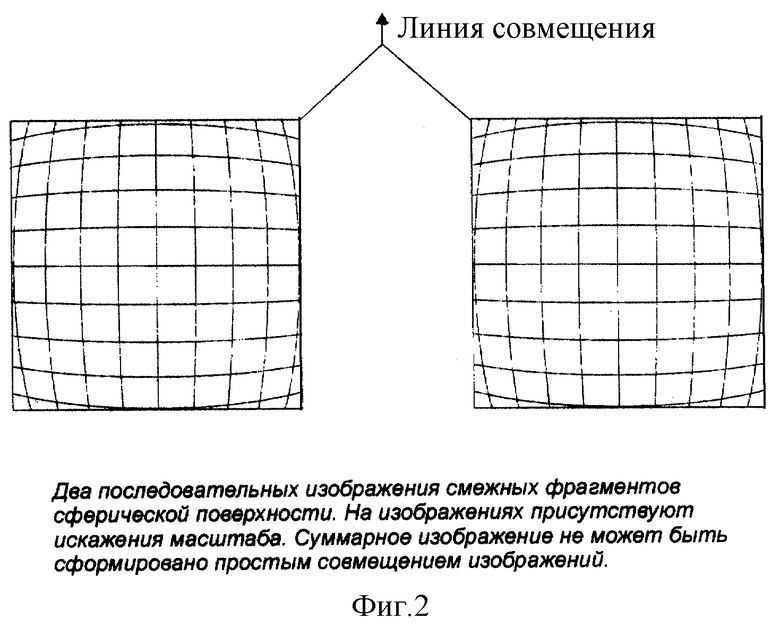
Наиболее близким к предлагаемому является способ контроля и регулирования положения изделия при оптическом наблюдении, при котором изображение боковой поверхности пули формируется из набора прямоугольных частично перекрывающихся изображений при перемещении оптической системы [7]. Для контроля положения изделия используются два дополнительных источника света (лазера), создающих на поверхности изделия линии освещенности, по форме и расстоянию между которыми определяют фокус, наклон и сдвиг пули относительно оптической оси. Это затрудняет реализацию способа, поскольку вынуждает каждый раз при получении изображения поверхности определять положение изделия в фокусе (измерять расстояние между линиями освещенности и оценивать форму таких линий), и вносит дополнительные погрешности при определении поверхностного рельефа изделия. Кроме того, этот способ имеет ряд проблем и недостатков, связанных с совмещением соседних фрагментов изображения. Оптимальное совмещение фрагментов крайне затруднено в тех случаях, когда на краях фрагментов изображение слабо меняется и корреляция изображений в зонах пересечения имеет таким образом протяженный размытый максимум. Также предъявляются чрезвычайно жесткие ограничения на дисторсии в оптической системе - оптическая дисторсия также размывает максимум корреляции. В общем случае полное изображение не может быть сформировано простым совмещением фрагментов (фиг. 2). Изображения фрагментов должны быть предварительно преобразованы таким образом, чтобы было полностью скомпенсировано искажение масштаба, вызванное рельефом. Однако при отсутствии априорных знаний о форме поверхности (как обычно и бывает) совмещение фрагментов становится проблематичным. Все это затрудняет получение и снижает точность формирования резких изображений поверхностей сложной формы и общего рельефа с его деталями из серии изображений поверхности.
Задачей настоящего изобретения является создание способа формирования изображений и определения рельефа объектов сложной формы, свободного от перечисленных выше проблем и недостатков.
Поставленная задача решается тем, что в способе формирования изображений и определения рельефа объектов сложной формы, заключающемся в расположении и перемещении при фокусировании оптической системы относительно объекта, ось наблюдения которого перпендикулярна оптической оси системы, и формировании серии изображений, по которым определяется рельеф объекта, первое изображение формируют в начальном положении оптической системы, когда предметная плоскость находится перед объектом, перемещают оптическую систему вдоль оптической оси в направлении к объекту на фиксированное расстояние, меньшее глубины резкости системы, и формируют второе изображение, повторяют аналогичные перемещения оптической системы с формированием последующих изображений до тех пор, пока предметная плоскость оптической системы не сместится за объект, преобразуют полученную серию изображений таким образом, чтобы все точки объекта не изменяли своих координат в каждом изображении серии относительно условно центрального изображения, изображения приводят к единому масштабу и совмещают в точке оптической оси, разделяют изображения на малые области и анализируют резкость в каждой из областей, высоту рельефа в каждой области определяют по максимальной резкости, конечное изображение формируют из изображений серии в соответствии с полученным рельефом, а каждый элемент конечного изображения выбирают из ближайшего по рельефу изображения серии.
В качестве единого масштаба может быть выбран масштаб изображения, содержащего наибольшее количество областей максимальной резкости.
Каждый элемент конечного изображения может быть получен интерполяцией из ближайшего по рельефу изображения серии.
Предпочтительно производят сглаживание полученного рельефа для уменьшения шумов, обусловленных возможными ошибками при определении максимальной резкости. Параметры сглаживания подбирают с отсутствием воздействия на частоты, характерные для данного класса изображений.
Предпочтительно конечное изображение формируют по полученному рельефу суперпозицией элементов изображений серий, причем при суперпозиции элемент изображения выбирают из ближайшего по рельефу изображения либо элемент изображения интерполируют из двух смежных изображений, расположенных выше и ниже точки рельефа объекта, либо другим известным способом.
Для объектов в основном цилиндрической формы, таких как пули, при перемещении оптической системы каждое изображение серии формируют за один полный оборот объекта вокруг его оси вращения, соответствующей оси наблюдения, с фиксированным количеством отсчетов за оборот. Ось вращения выбирают возможно ближе к продольной оси цилиндрической части объекта.
Предпочтительно в полученной серии изображений компенсируют искажения, связанные с изменением масштаба при перемещении оптической системы, и искажения, обусловленные несовпадением оси вращения и оси симметрии объекта.
Предпочтительно полученный рельеф объекта используют для обеспечения оптимальных условий подсветки, причем подсветку, связанную с углом к поверхности объекта (например, 30o), осуществляют с возможностью исключения бликов и глубоких теней на изображении объекта при достижении максимального контраста на интересующих деталях объекта.
Предпочтительно для объектов с осью вращения, таких как пули, в качестве условно центрального изображения выбирают изображение, содержащее наибольшее количество областей максимальной резкости.
Полученный рельеф может быть использован для выделения характерных признаков объекта.
Изобретение поясняется чертежом, где:
Фиг. 1 иллюстрирует параметры оптической системы и следа бойка ударника на гильзе в известной области техники.
Фиг. 2 иллюстрирует возможности совмещения смежных фрагментов сферической поверхности в известной области техники.
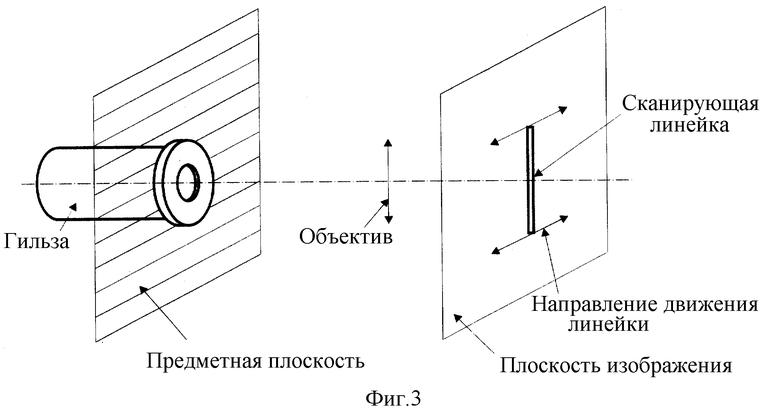
Фиг. 3 иллюстрирует предпочтительный вариант осуществления изобретения для объекта в виде гильзы.
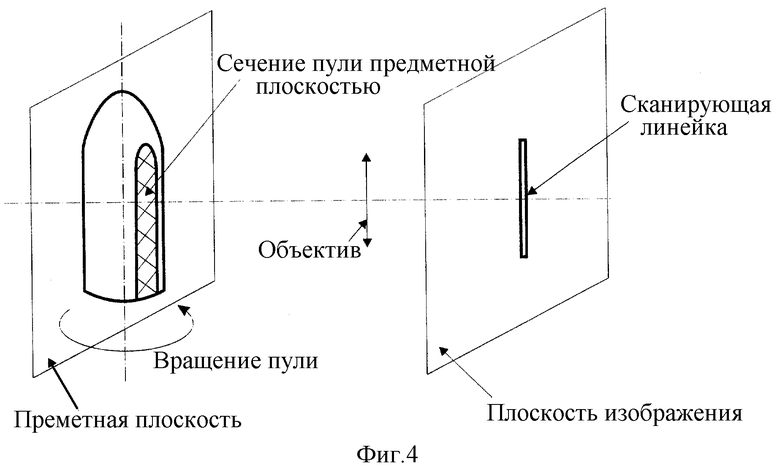
Фиг. 4 иллюстрирует другой предпочтительный вариант осуществления изобретения для объекта в виде пули.
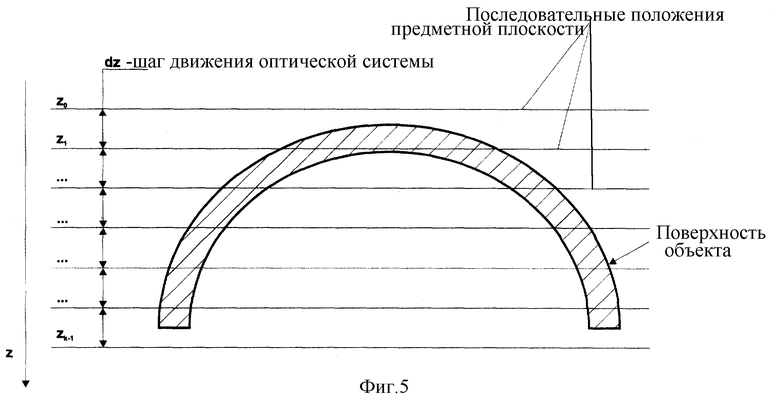
Фиг. 5 иллюстрирует процедуру перемещения оптической системы согласно изобретению.
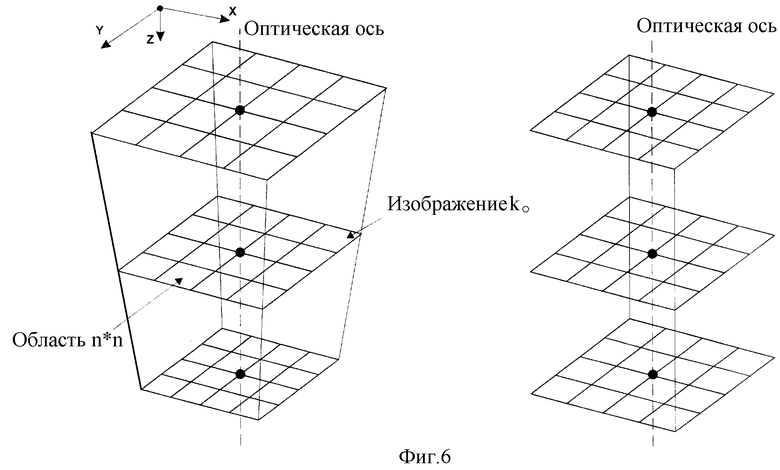
Фиг. 6 иллюстрирует совмещение изображений в точке на оптической оси согласно изобретению.
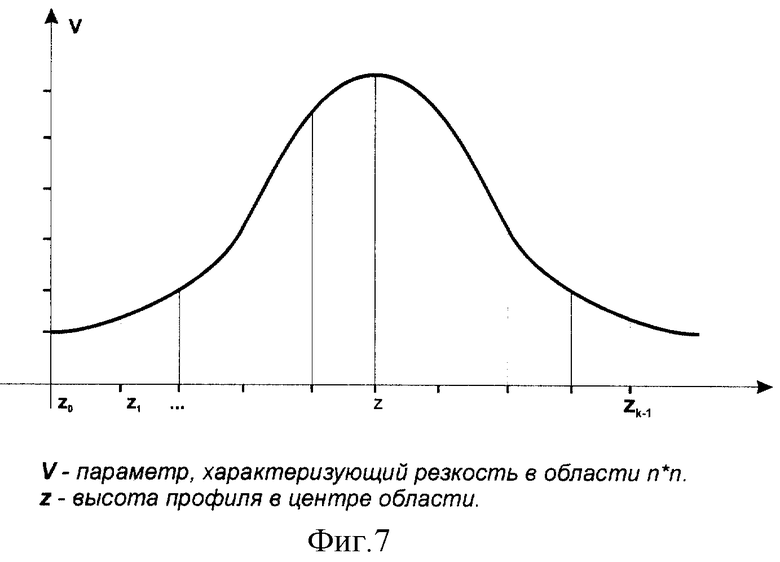
Фиг. 7 показывает изменение параметра, характеризующего резкость в малых областях изображения согласно известному уровню техники.
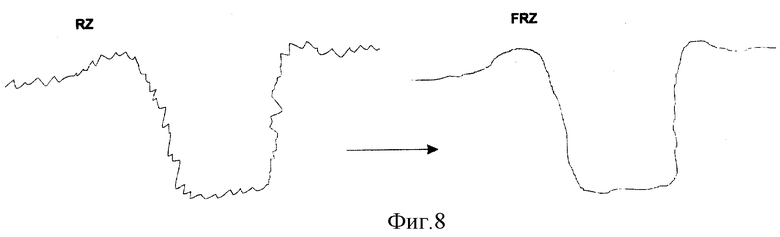
Фиг. 8 иллюстрирует процесс сглаживания рельефа согласно изобретению.
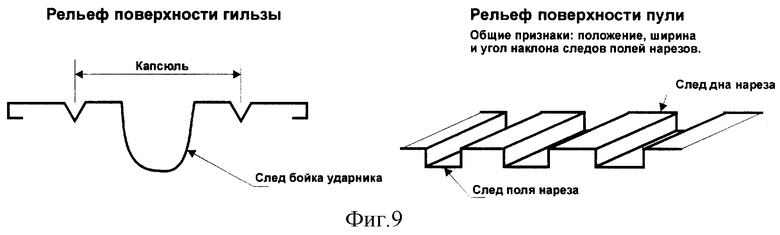
Фиг. 9 показывает примеры характерных признаков рельефа пуль и гильз, выявляемых согласно изобретению.
Способ формирования изображений и определения рельефа объектов сложной формы на примерах предпочтительных вариантов осуществления реализуется следующим образом.
Для формирования изображений в цифровой форме предпочтительно используется сканирующая линейка, количество элементов в которой достаточно для получения изображения требуемого оптического разрешения. В случае гильзы линейка перемещается поступательно параллельно плоскости дна гильзы (фиг. 3). В случае пули продольная ось линейки совпадает с осью вращения пули (фиг. 4) и одно изображение формируется из полного оборота пули вокруг оси вращения. Ось вращения выбирается возможно ближе к оси цилиндрической части пули.
Оптическая система отодвигается от объекта на расстояние, при котором предметная плоскость находится перед объектом и не пересекается с ним (фиг. 5). Формируется первое изображение. Затем оптическая система придвигается к объекту на фиксированное расстояние (шаг) dz, которое меньше глубины резкости dF. Формируется второе изображение. Процесс продолжается до тех пор, пока предметная плоскость не сместится за границу интересующего объекта.
Средства установки гильзы или пули, вращения пули, перемещения оптической системы аналогичны известным из описанных выше источников информации и поэтому здесь специально не упоминаются (на чертеже не показаны).
Обозначим IMG[k][i][j] - k-е изображение, где:
k - номер изображения в серии, k = 0,1,...K-1;
i - номер строки изображения, i = 0,1,...I-1;
j - номер столбца изображения, j = 0,1,...J-1;
K - количество изображений в серии;
I - количество строк в изображении;
J - количество столбцов в изображении.
В результате получается серия изображений объекта. Поскольку шаг dz движения оптической системы выбирается меньше глубины резкости dF, любая малая область объекта хотя бы на одном изображении имеет максимально возможную резкость.
Целью описываемого алгоритма является формирование изображения объекта из указанной серии изображений таким образом, чтобы каждая область результирующего изображения имела максимально возможную резкость.
Пусть количество изображений в серии равно K и Z-координата, соответствующая первому изображению, равна zO. Тогда z-координаты, соответствующие изображениям серии K, равны (фиг. 5);
z[k] = zO + dz•k, k = 0,1,...K-1.
Перед началом анализа серии изображений все изображения преобразуются таким образом, чтобы все точки изображения объекта не изменяли своего положения в различных изображениях серии. При движении оптической системы все точки изображения смещаются от оптической оси. Поэтому изображения приводятся к одному масштабу и совмещаются в точке оптической оси (фиг. 6). В качестве единого масштаба выбирается масштаб изображения номер kO, содержащего наибольшее количество областей максимальной резкости.
Обозначим переднее фокусное расстояние оптической системы как F. Тогда при единичном малом смещении изменение масштаба изображения будет составлять dS=1/F. Соответственно, изображения серии преобразуются следующим образом.
В случае гильзы:
SIMG[k][i][j] = IMG[k][i+(i-Oy)•S[k][j+(j-Ox)•S[k]].
В случае пули:
SIMG[k][i][j] = IMG[k][i+(i-Oy)•S[k][j].
Здесь k = 0,1,...k-1 - номер изображения в серии,
i = 0,1,...I-1 - номер строки изображения,
j = 0,1,...J-1 - номер колонки изображения,
Ox - x-координата оптической оси,
Oy - y-координата оптической оси,
S[k] = dS•(kO-k)•dz.
Следует отметить, что изображение пули в направлении координаты x не меняется по масштабу, поскольку изображение образуется из одного полного оборота пули с фиксированным количеством отсчетов на оборот.
Полученные изображения разбиваются на малые области n•n R[k][i][j] (фиг. 6), где:
k - номер изображения в серии, k = 0,1,...K-1;
i = 0,1,...M-1, M = I/n;
j = 0,1,...N-1, N = J/n.
В каждой области R[k][i][j] анализируется резкость изображения одним из известных способов [8, 9, 10] (фиг. 7). Z-координата, соответствующая максимуму кривой (фиг. 7), определяет высоту рельефа области i,j - RZ[i][j]. В результате получается рельеф всего объекта. Полученный рельеф содержит шум, обусловленный возможными ошибками при определении максимальной резкости. Для уменьшения шума производится сглаживание рельефа RZ. Параметры сглаживающего фильтра (не показан) подбираются таким образом, чтобы он не воздействовал на частоты, характерные для данного класса изображений (фиг. 8), то есть RZF = F(RZ).
Полученный рельеф RZF объекта используется для определения характерных признаков пуль и гильз (фиг. 9), а также для формирования результирующего изображения. Высота ZI рельефа в каждом элементе (пикселе) результирующего изображения определяется интерполяцией из узлов RZF, то есть:
z(k) ≅ ZI ≅ z(k+1), k = 0,1,...N-1.
Соответственно, пиксел изображения формируется суперпозицией пикселов изображений SIMG k и k+1 серий. Возможны различные варианты суперпозиции, например, пиксел выбирается из ближайшего по рельефу изображению или интерполируется из двух смежных изображений, расположенных выше и ниже точки рельефа объекта.
Таким образом, каждая точка результирующего изображения отстоит от предметной плоскости на расстояние, меньшее, чем глубина резкости, и поэтому изображение объекта сложного профиля в каждой точке является оптимальным. Это позволяет точно определять рельеф таких объектов сложной формы, как гильзы или пули, и, соответственно, выявлять характерные признаки объектов для задач судебной баллистики, то есть решить поставленную задачу.
Специалистам в данной области техники понятно, что возможны различные модификации и изменения описанных предпочтительных вариантов осуществления в пределах объема, ограниченного только прилагаемой формулой изобретения.
Источники информации
1. US 3712466, МКИ B 07 C 5/00, опубл. 1973.
2. US 3780614, МКИ C 06 B 21/02, опубл. 1973.
3. US 4923066, МКИ B 07 C 5/342, опубл. 1990.
4. WO 92/020988, МКИ F 42 B 35/00, опубл. 1992.
5. WO 96/21137, МКИ F 42 B 35/00, G 01 H 21/88, опубл. 1996.
6. WO 86/07443, МКИ G 01 B 11/24, опубл. 1986.
7. WO 93/22617, МКИ G 01 B 11/02, опубл. 1993.
8. R.A.Jones, An Automated Technique for Deriving MTFs from Edge Traces, Photographic Science and Engineering, 1967, Vol. 11, N 2, pp. 102 - 106.
9. S. B. Campana, Techniques fos Evaluating Charge Coupled Imagers, Optical Engineering, 1977, Vol. 16, N 3, pp. 267 - 274.
10. A. Daniels, G.D.Boreman, A.D.Ducharme and E.Sapir, Random Transparency Target for Modulation Transfer Function Measurement in the Visible and Infrared Regions, Optical Engineering, 1995, Vol. 34, N 3, pp. 860-868.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПАПИЛЛЯРНОГО УЗОРА | 1993 |
|
RU2051415C1 |
| НОСИТЕЛЬ БИОМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2007 |
|
RU2336018C1 |
| СПОСОБ СКАНИРОВАНИЯ РИСУНКА КОЖНЫХ ЛИНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2168206C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕКОМЕНДАТЕЛЬНОГО СПИСКА С ИСПОЛЬЗОВАНИЕМ ДАКТИЛОСКОПИЧЕСКОЙ БАЗЫ ДАННЫХ, ДАКТИЛОСКОПИЧЕСКАЯ БАЗА ДАННЫХ И СПОСОБ ЕЕ ФОРМИРОВАНИЯ | 2008 |
|
RU2410749C2 |
| СПОСОБ ФИЛЬТРАЦИИ ДАКТИЛОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2006 |
|
RU2329537C1 |
| МОБИЛЬНЫЙ ТЕРМИНАЛ ДЛЯ СБОРА ИДЕНТИФИЦИРУЮЩИХ ЛИЧНОСТЬ ДАННЫХ | 2016 |
|
RU2617335C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАРЕЗНОГО ОГНЕСТРЕЛЬНОГО ОРУЖИЯ ПО СЛЕДАМ НА ПУЛЯХ | 2001 |
|
RU2221219C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕМНЫХ ОБЪЕКТОВ ИЛИ ГЛУБОКИХ СЦЕН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2544784C2 |
| СПОСОБ СКАНИРОВАНИЯ ИЗОБРАЖЕНИЙ МИКРОРЕЛЬЕФА БОКОВЫХ ПОВЕРХНОСТЕЙ СТРЕЛЯНЫХ ПУЛЬ И ГИЛЬЗ И УСТРОЙСТВО СКАНИРОВАНИЯ ИЗОБРАЖЕНИЙ СТРЕЛЯНЫХ ПУЛЬ И ГИЛЬЗ АВТОМАТИЗИРОВАННОГО БАЛЛИСТИЧЕСКОГО ИДЕНТИФИКАЦИОННОГО КОМПЛЕКСА | 2006 |
|
RU2315353C1 |
| Способ трехмерной реконструкции поверхности образца по изображениям, полученным в растровом электронном микроскопе | 2016 |
|
RU2704390C2 |
Изобретение относится к исследованию и анализу физического состояния объектов сложной формы с помощью оптических средств, в частности к определению рельефа таких объектов, как стреляные пули и гильзы. Способ формирования изображений и определения рельефа объектов сложной формы заключается в расположении и перемещении оптической системы относительно объекта, ось наблюдения которого перпендикулярна оптической оси системы, и формировании серии изображений. Изображения приводят к единому масштабу и совмещают в точке оптической оси, разделяют изображения на малые области и анализируют резкость в каждой из областей, высоту рельефа в каждой области определяют по максимальной резкости, конечное изображение формируют из изображений серии в соответствии с полученным рельефом, а каждый элемент конечного изображения выбирают из ближайшего по рельефу изображения серии. Таким образом, каждая точка результирующего изображения отстоит от предметной плоскости на расстояние, меньшее, чем глубина резкости, и поэтому изображение объекта сложного профиля в каждой точке является оптимальным. Это позволяет точно определять рельеф таких объектов сложной формы, как гильзы или пули, и, соответственно, выявлять характерные признаки объектов для задач судебной баллистики. 14 з.п.ф-лы, 9 ил.
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Способ дефектоскопии поверхности изделий | 1988 |
|
SU1617342A1 |
| US 4432648 A, 21.02.1984 | |||
| Устройство для продольной резки полосного материала | 1976 |
|
SU608660A1 |
| Экономайзер | 0 |
|
SU94A1 |
| Способ регулирования швейных машин | 1971 |
|
SU442252A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |

