Область техники
Изобретения относятся к области оптико-электронного приборостроения и могут быть использованы в сканирующих устройствах современных автоматизированных баллистических идентификационных комплексов для записи и ввода в систему изображений микрорельефа боковых поверхностей стреляных пуль и дна стреляных гильз.
Уровень техники
В настоящее время весьма актуальной является задача обеспечения контроля за оборотом огнестрельного оружия.
Одним из условий для успешного решения поставленной задачи является наличие высокопроизводительных аппаратно-программных средств, позволяющих получать цифровые изображения больших массивов стреляных пуль и гильз для формирования центральной пулегильзотеки и выполнять идентификацию баллистических объектов.
Известен криминалистический микроскоп сравнения типа МКС-1 (Скворцов Г.Е. и др. "Микроскопы", Ленинград, 1969 г.). Прибор позволяет эксперту получить в поле зрения совмещенные изображения двух сравниваемых объектов, идентифицировать их и, при необходимости, получить фотографическим путем твердую копию. Этот метод достаточно трудоемок и непроизводителен, так как микроскоп дает резкое изображение лишь небольшого фрагмента цилиндрической поверхности пули, а просмотр всей поверхности пуль и поиск на них идентичных микротрасс требуют больших затрат времени и чрезвычайно высокой квалификации эксперта.
Известен способ получения изображения полной развертки цилиндрической поверхности пуль и гильз фотографическим путем. Он состоит в том, что равномерно вращающийся вокруг своей оси объект фотографируют через щелевой затвор на равномерно перемещающуюся фотопленку или фотопластинку, скорость транспортирования которой синхронизирована со скоростью движения изображения в фокальной плоскости. При этом в каждый момент времени на пленке регистрируется узкий фрагмент цилиндрической поверхности, определяемый увеличением и шириной экспозиционной щели и мало отличающийся от плоскости. В результате последовательной фиксации этих фрагментов на пленке синтезируется полное изображение развертки. Этот способ реализован в установках "Развертка" и РФ-4, разработанных НИИ спецтехники МВД России, которые позволяют получить на фотопластинке изображение разверток цилиндрических тел диаметром 4-100 мм с увеличением 0,5 или 2Х.
Недостатком этих приборов является низкая разрешающая способность, которая позволяет видеть лишь общую картину развертки с макрофрагментами цилиндрической поверхности, например форму полей нарезов на отстрелянных из нарезного оружия пулях. Для фиксации микроцарапин шириной от 5 мкм необходимо вести работу при увеличении 30-50Х.
Кроме того, в устройстве не предусмотрена автоматическая фокусировка объектива при работе с деформированными объектами, какими обычно являются отстрелянные пули. Так, при увеличении 2Х допускается отклонение от идеального цилиндра не более 0,2 мм, что снижает достоверность полученной информации с реального объекта.
Известен также способ получения изображения развертки пуль и гильз нарезного стрелкового оружия. Он состоит в том, что телекамерой с ПЗС-матрицей, используя при этом систему автофокусировки, проецирующую световой штрих на объект, снимают последовательно отдельные прямоугольные фрагменты поверхности, оцифровывают получаемые изображения с помощью аналого-цифрового преобразователя (АЦП) и записывают в памяти ЭВМ с возможностью последующего синтеза полной развертки. Этот способ реализован в комплексе аппаратуры IBIS (Integrated Ballistics Identification Sistem) канадской фирмы Forensic Technology (WAI) inc. (IBIS Training Manual, 1995, Руководство по работе с аппаратурой).
Комплекс включает оптико-электронную систему (синтез микроскопа и телевизионной CCD-камеры) и мощную ЭВМ со специализированным программным обеспечением. Применение камеры с ПЗС-матрицей позволяет представлять изображение в цифровой форме и в дальнейшем обрабатывать его на ЭВМ. Предусмотрена также система автофокусировки, выполненная в виде двух установленных под углом 45° к поверхности снимаемого фрагмента лазеров, формирующих на ней световой штрих, компьютерный анализ изображения которых на ПЗС-матрице позволяет определить величину дефокусировки. Освещение объекта осуществляется либо направленным, либо кольцевым источниками света на лампах накаливания. Исследуемая пуля устанавливается донышком на горизонтальном шпинделе с помощью специального клеящего состава.
Недостатками этого способа и реализующей его системы являются:
- низкая достоверность полного изображения рельефа развертки деформированных пуль и гильз. При наличии деформаций в цилиндрической части пули, например в эллипсоидальном сечении, при повороте пули, во-первых, изменяется ее текущий (для снимаемого фрагмента) радиус, а во-вторых, для большинства фрагментов имеет место разворот снимаемой поверхности относительно нормали к оси объектива. При этом, поскольку снимаются фрагменты одинаковой ширины (по дуге), то при синтезе полного изображения развертки неизбежны пропуски или повторы отдельных элементов, а также искажения масштаба для неперпендикулярных к оси объектива фрагментов;
- высокая инерционность осветителя на лампах накаливания, что ведет при необходимости постоянных включений-выключений к увеличению времени съема информации;
- неудобство установки и центрировки исследуемой пули.
Известен способ идентификации нарезного оружия по следам на пулях (RU заявка на изобретение №2001124145, G01N 21/84, 2001.08.29). Способ включает расположение и перемещение при фокусировании оптической системы относительно пули, ось которой перпендикулярна оптической оси системы, и формировании серии изображений, по которым определяется рельеф поверхности пули. Перед формированием серии изображений боковой поверхности пули ее помещают на поворотное устройство с помощью устройства крепления, имеющего возможность наклона по двум осям, линейно независимым друг с другом и с осью вращения поворотного устройства, производят регулировку положения пули так, чтобы ось пули приблизительно совпадала с осью вращения поворотного устройства, поворачивают поворотное устройство с одновременным измерением угла его поворота относительно первоначального положения и производят регистрацию с помощью фоточувствительного устройства, например видеокамеры настроечной серии изображений, захватывающих, по меньшей мере, три грани нарезов, расположенных не менее чем на половине длины окружности пули и, по меньшей мере, три цилиндрических фрагмента поверхности пули, образованные полями ствола при прохождении пули через канал ствола, расположенные не менее чем на половине длины окружности пули, измеряют расстояние от некоторой фиксированной плоскости до поверхности пули, определяют положение граней нарезов и углы их наклона относительно некоторой неподвижной оси, по различию углов наклона граней нарезов вычисляют угол наклона оси пули относительно оси вращения поворотного устройства, а по различию расстояний от фиксированной плоскости до цилиндрических фрагментов поверхности пули вычисляют радиальное смещение оси пули относительно оси вращения поворотного устройства, по полученным данным об угловом и радиальном смещениях определяют компенсирующие воздействия и подают их на устройство крепления пули, после чего формируют серии изображений боковой поверхности пули для последующей идентификации оружия.
Известен способ получения изображения развертки поверхности пуль и гильз нарезного стрелкового оружия и устройство для получения изображения развертки цилиндрических тел (RU 2130628, G02B 21/36, 1997.08.06). Способ предполагает получение изображения развертки поверхности пуль и гильз нарезного стрелкового оружия, в том числе и деформированных, с высокой разрешающей способностью, минимальными искажениями и возможностью записи в цифровом виде. С помощью телекамеры с ПЗС-матрицей, используя при этом систему автофокусировки, проецирующую световой штрих на объект, снимают последовательно отдельные прямоугольные фрагменты поверхности, оцифровывают получаемые изображения и записывают в памяти ЭВМ с возможностью последующего синтеза полной развертки. Исследуемый объект позиционируют в исходное положение, перед съемкой каждого кадра производят поворот объекта на постоянный, точно воспроизводимый угол, фокусируют телекамеру с помощью системы автофокусировки, затем по величине дефокусировки вычисляют текущий радиус объекта и определяемую им ширину фрагмента, обеспечивающую последующий синтез изображения развертки без пропусков и переналожений. Определяют угол отклонения поверхности фрагмента от нормали к оптической оси телекамеры, поворачивают на этот угол ПЗС-матрицу телекамеры вокруг оси, параллельной оси вращения объекта и лежащей в плоскости матрицы, и производят съемку и запись фрагмента, включая поочередно правый и левый осветители. При этом требуемую ширину записываемого фрагмента поверхности обеспечивают изменением числа считываемых столбцов элементов ПЗС-матрицы, а угол отклонения поверхности фрагмента от нормали к оптической оси объектива определяют по развороту светового штриха на объекте, формируемого излучателем системы автофокуса, путем компьютерного анализа его изображения на ПЗС-матрице. Устройство, реализующее способ, содержит осветители, объектодержатель, механизмы продольного сканирования, поворота объекта и фокусировочной подвижки, систему автофокусировки, телевизионную камеру с ПЗС-матрицей, АЦП и ЭВМ. При этом привод фокусировочной подвижки снабжен датчиком позиционирования в исходное положение, ПЗС-матрица установлена с возможностью поворота вокруг оси, лежащей в ее плоскости и параллельной оси исследуемого объекта, и снабжена приводом для вращения с шаговым электродвигателем, а осветитель объекта выполнен в виде пары попеременно включающихся площадных малоинерционных широкоапертурных источников рассеянного света, например светодиодных матриц. Объектодержатель выполнен в виде съемного узла, представляющего собой установленные соосно в общем корпусе, снабженном направляющими, поворотный столик с зубчатой полумуфтой и подпружиненный прижим со свободно вращающейся центрировочной зубчатой коронкой, причем на установочной поверхности столика нанесено рифление, а в полумуфте предусмотрено центрирующее отверстие для сопряжения с осью привода вращения объекта.
Дальнейшее усовершенствование известных решений описано в способе получения изображения развертки поверхности деформированных цилиндрических объектов (RU 2155378, G06K 9/60, 1999.01.26).
Способ заключается в том, что телекамерой с ПЗС-матрицей, используя проектирующую оптическую систему, систему автофокусировки, проецирующую световой штрих на объект, и систему позиционирования объекта в исходное положение, и осветители, снимают последовательно отдельные кадры поверхности, поворачивая объект на постоянный точно воспроизводимый угол, оцифровывают получаемые изображения и записывают в памяти ЭВМ с последующим синтезом полной развертки, при этом перед записью каждого кадра поверхности исследуемого объекта, соответствующего одному угловому шагу, после предварительного фокусирования объекта производят компьютерный анализ изображения на объекте светового штриха, выделяют границы фрагментов записи поверхности объекта, отстоящих от плоскости наилучшей фокусировки на расстояния, кратные величине глубины резкости проектирующей оптической системы, затем последовательно производят запись фрагментов, каждый раз перемещая объект вдоль оптической оси на величину, равную глубине резкости, корректируют разворот поверхности объекта, анализируя изображение светового штриха внутри каждого фрагмента, и синтезируют из фрагментов запись полного кадра, а для синтеза полной развертки определяют положение границы кадра, являющейся общей с последующим кадром записи, а по ней определяют ширину смежных полукадров текущего и последующего кадра. При этом при синтезе изображения полного кадра границы фрагментов определяют по столбцам ПЗС-матрицы, проходящим через точки пересечения кривой светового штриха и строки ПЗС-матрицы, соответствующие проекциям на ПЗС-матрицу линий пересечения светового штриха и плоскостей, перпендикулярных оптической оси проектирующей системы, и расположенных симметрично относительно плоскости наилучшей фокусировки, и находящихся друг от друга на расстоянии, равном глубине резкости, а для последующего синтеза полной развертки границу кадра определяют, например, измеряя радиус вращения точки объекта, расположенной на оптической оси, после поворота объекта на угол, равный половине углового шага.
Известное решение принято в качестве прототипа изобретения.
К недостаткам известного способа и устройства можно отнести следующие:
- длительность времени фокусировки оптической системы на выбранном для сканирования элементе поверхности цилиндрического или плоского объекта,
- наличие погрешностей позиционирования оптической оси видеокамеры на объекте.
Вышеперечисленные недостатки приводят к уменьшению контрастности и четкости изображения (качество изображения) развертки поверхности деформированных цилиндрических объектов. Кроме того, снижается производительность работы баллистического идентификационного комплекса при сканировании больших массивов стреляных пуль и гильз.
Раскрытие изобретения
Таким образом, задачи, на решение которых направлены изобретения, заключаются в повышение точности и уменьшении времени автоматической фокусировки оптической системы на выбранном для сканирования элементе поверхности цилиндрического или плоского объекта (стреляных пуль и гильз).
Поставленные задачи решены следующим образом. Способ сканирования изображений микрорельефа боковых поверхностей стреляных пуль и гильз включает сканирование посредством видеокамеры с ПЗС-матрицей отдельных прямоугольных фрагментов боковой поверхности объекта, дальнейшую обработку полученной информации и последующий синтез полной развертки, при этом фокусировку объектива видеокамеры с ПЗС-матрицей на выбранном для сканирования элементе поверхности объекта производят ее поступательным перемещением вдоль оптической оси объектива, а на боковой поверхности объекта одновременно формируют два световых штриха, которые на ПЗС-матрице изображены в виде двух отрезков изогнутой формы, расположенных по разные стороны от линии наилучшей фокусировки, причем вершины упомянутых отрезков отстоят от упомянутой линии на величины А и В, затем по значениям величин А и В определяют величину расфокусировки Х по формуле
X=A·[1+(B-A)/(B+A)]/tg(α),
где α - угол наклона щелевых осветителей к оптической оси объектива видеокамеры,
определяют β - угол наклона деформированного элемента сканируемой поверхности, по формуле
β=arctg[(B+A)/(B-A)·tg(α)]
после чего определяют величину расфокусировки и единожды производят корректировку положения каретки фокусировки до совпадения вершин упомянутых отрезков, далее повторяют процесс фокусировки для других положений боковой поверхности объекта.
Устройство сканирования изображений микрорельефа боковых поверхностей стреляных пуль и гильз автоматизированного баллистического идентификационного комплекса, содержащее осветители, объектодержатель, механизмы продольного сканирования, поворота объекта и фокусировочного узла, систему фокусировки, видеокамеру с ПЗС-матрицей, АЦП и ЭВМ, отличающееся тем, что оно снабжено дополнительным щелевым осветителем, который расположен оппозитно основному щелевому осветителю относительно оптической оси объектива видеокамеры, при этом видеокамера с ПЗС-матрицей и закрепленными на ней осветителем, основным и дополнительным щелевыми осветителями, установлена с возможностью продольного перемещения вдоль оптической оси объектива видеокамеры.
Предлагаемые изобретения поясняются чертежами.
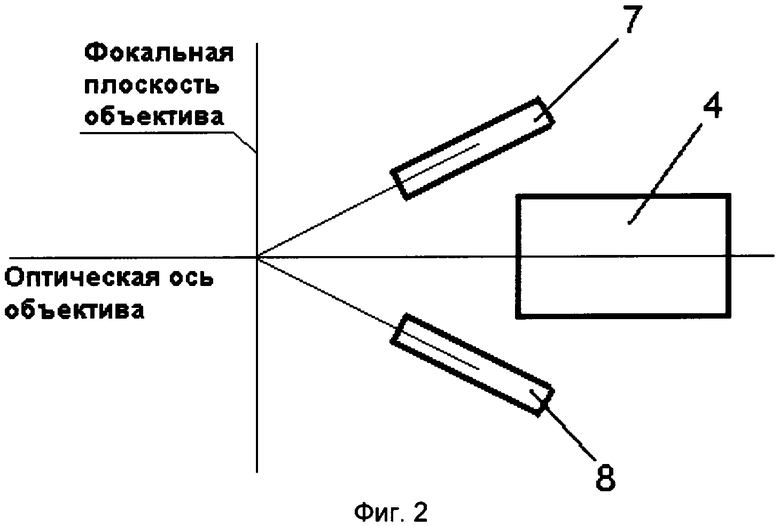
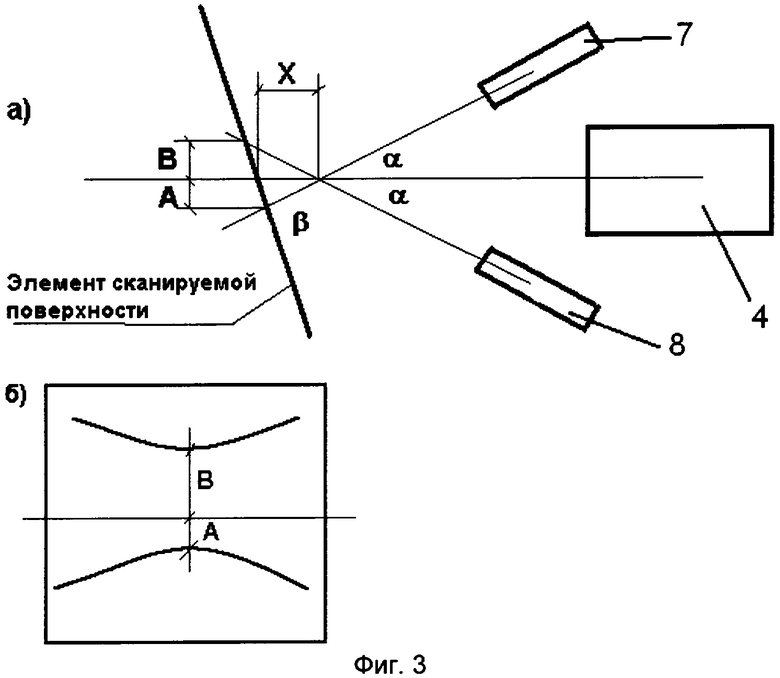
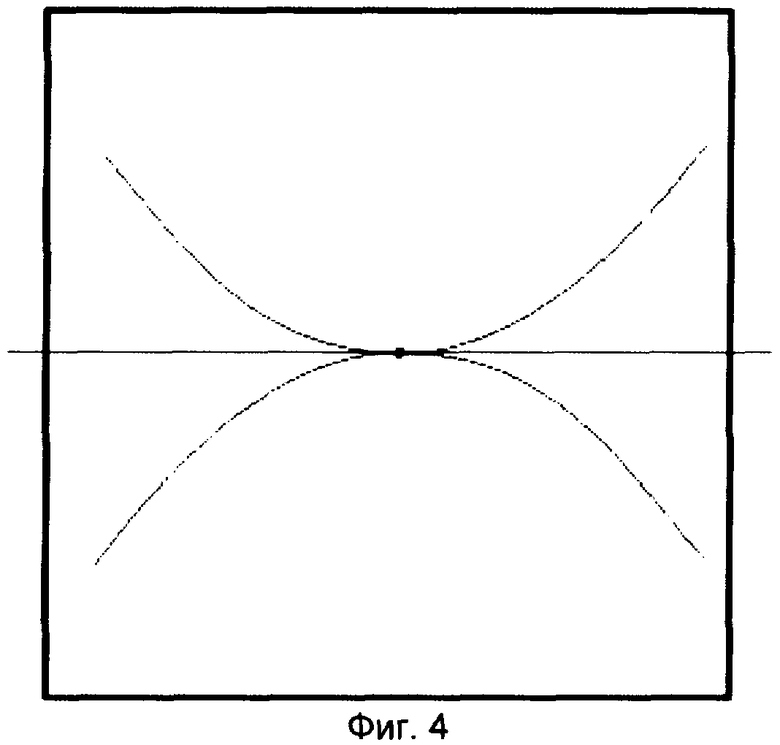
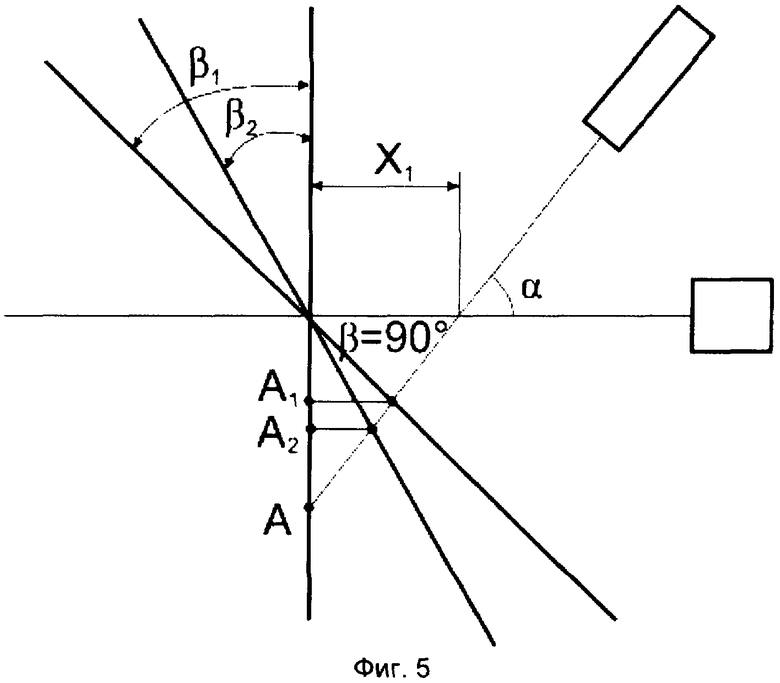
На фиг.1 изображен общий вид устройства; на фиг.2 - оптическая схема расположения элементов конструкции; на фиг.3а - схема расфокусировки изображения на величину X, 3б - расположение световых штрихов на ПЗС-матрице при расфокусированном положении объекта; на фиг.4 - расположение световых штрихов на ПЗС-матрице при сфокусированном положении объекта; на фиг.5 показаны две деформированные поверхности, расположенные под углами β1 и β2.
Предлагаемое устройство входит в состав автоматизированного баллистического идентификационного комплекса.
Оно состоит из следующих основных узлов и элементов:
- объектодержателя 1, соединенного с двигателем вращения объекта 2 через муфту 3;
- видеокамеры 4 с ПЗС матрицей 5, с закрепленными на ней осветителем 6, основным щелевым осветителем 7 и дополнительным щелевым осветителем 8, который расположен оппозитно основному щелевому осветителю относительно оптической оси объектива видеокамеры;
- каретки фокусировки 9, которая через винтовую пару 10 и муфту 11 соединена с двигателем фокусировки 12;
- каретки сканирования 13 с датчиком позиционирования 14, которая через винтовую пару 15 и муфту 16 соединена с двигателя сканирования 17.
На каретке фокусировки 9 расположен датчик грубого позиционирования 18, а на валу двигателя фокусировки - датчик точного позиционирования каретки 19.
Оптическая система устройства отъюстирована так, чтобы оси основного и дополнительного щелевого осветителей пересекались на оптической оси объектива видеокамеры в фокальной плоскости объектива (в области пространства предметов) (фиг.2).
Устройство работает следующим образом.
Исследуемый объект устанавливают на объектодержатель 1. Далее с помощью шагового двигателя 12, который вращает винтовую пару 10 через муфту 11, каретку фокусировки 9 перемещают в исходное состояние, что автоматически контролируется по датчикам грубого 18 и точного 19 позиционирования.
С помощью шагового двигателя 2 объект разворачивают на требуемый угол. Затем шаговым двигателем 17, который вращает винтовую пару 15 через муфту 16, каретку сканирования 13 перемещают в заданное положение и контролируют с помощью датчика 14. Включают видеокамеру 4 и производят фокусировку ее объектива на выбранном для сканирования элементе поверхности объекта в следующей последовательности:
- включают основной 7 и дополнительный 8 щелевые осветители, лучи которых формируют на объекте световые штрихи, которые на ПЗС-матрице 5 изображаются в виде двух изогнутых отрезков (фиг.3б);
- в случае расфокусировки на величину Х (фиг.3а) изогнутые отрезки отстоят от линии наилучшей фокусировки на величины А и В, значения которых автоматически определяют при обработки цифрового изображения данных штрихов с помощью программного обеспечения;
- по значениям величин А и В определяют величину расфокусировки Х по формуле

где α - угол наклона щелевых осветителей к оптической оси объектива видеокамеры (задаются и выдерживаются конструктивно), угол наклона деформированного элемента сканируемой поверхности β определяется по формуле

- по значению величины расфокусировки X, рассчитанному по формуле (1), вырабатывают соответствующий сигнал управления, по которому шаговый двигатель фокусировки 12, вращая винтовую пару 10 через муфту 11, один раз (без дополнительных подвижек как в протопите) перемещает каретку фокусировки 9 на заданную величину X;
- после фокусировки анализируют положение изображений изогнутых отрезков на ПЗС-матрице, положение которых при сфокусированном положении объекта показаны на фиг.4.
Затем производят видеосъемку (фотографирование) сфокусированного элемента поверхности объекта в следующей последовательности: выключают щелевые осветители 7 и 8, включают осветители 6, видеокамерой 4 производят съемку сфокусированного элемента поверхности, изображение которого с ПЗС-матрицы 5 передают в компьютер для дальнейшей обработки и анализа.
Далее повторяют процесс фокусировки для других положения поверхности объекта.
К преимуществам изобретений, которые позволили решить поставленные задачи, можно отнести следующие:
1. Двигатель фокусировки 12 перемещает по направляющим типа «ласточкин хвост» видеокамеру, а не объектодержатель, как в прототипе, что уменьшает (на 10-15% по сравнению с аналогами и прототипом) погрешности позиционирования оптической оси видеокамеры на объекте.
2. Введен дополнительный щелевой осветитель 8, применение которого совместно с основным осветителем 7 позволяет повысить точность (на 5-25%) и уменьшить время фокусировки (на 35-80%) объектива видеокамеры на выбранном для сканирования участке поверхности объекта, что в свою очередь повышает контрастность и четкость изображения (качество изображения) на ПЗС-матрице 5 видеокамеры.
Поясним это на примере. При автофокусировке, принятой в прототипе, используется один щелевой осветитель, который формирует на поверхности объекта один световой штрих. Величина расфокусировки X1 определяется углом наклона оси щелевого осветителя к оптической оси объектива видеокамеры α и величиной А (максимальное расстояние штриха относительно линии наилучшей фокусировки) и рассчитывается по формуле

Видно, что данная формула дает правильный результат для величины X1, если поверхность практически не деформирована, то есть когда угол разворота элемента поверхности к оптической оси объектива видеокамеры β близок к 90° (фиг.5). Если угол β меньше 90°, то величина А не определяет однозначно величину расфокусировки X1. На фиг.5 для примера показаны две деформированные поверхности (расположенные под углами β1 и β2 соответственно), которые при одинаковой величине расфокусировки X1 имеют разные расстояния штриха от оптической оси объектива: A1 и A2 соответственно. Очевидно, что при наличии одного щелевого осветителя принципиально невозможно по значению А точно определить величину X1, пользуясь формулой (3).
Ошибку Δ способа прототипа в определении величины расфокусировки по сравнению с предлагаемым в данном патенте можно оценить (в %) как

где X вычисляется по формуле (1), а X1 - по формуле (3).
Результаты расчета ошибки Δ зависимости от соотношений величин А и В и угла β сведены в таблицу.
Видно, что ошибка при уменьшении угла наклона элемента поверхности β увеличивается. Для точной фокусировки по способу прототипа необходимо провести ряд приближений, каждый раз включая щелевой осветитель и определяя величину А, что значительно увеличивает время фокусировки. Предлагаемые изобретения определяют точно величину расфокусировки за одну итерацию независимо от степени деформации сканируемой поверхности (независимо от угла β).
3. Позволяет вычислить по формуле (2) угол наклона β элемента деформированной поверхности сканируемого объекта, что дает дополнительную информацию для построения трехмерной модели его поверхности. Способ и устройство прототипа не позволяет этого сделать в принципе.
Изобретение относится к области оптико-электронного приборостроения и может быть использовано в сканирующих устройствах современных автоматизированных баллистических идентификационных комплексах для записи и ввода в систему изображений микрорельефа боковых поверхностей стреляных пуль и дна стреляных гильз.
Технический результат - повышение точности и уменьшение времени автоматической фокусировки оптической системы на выбранном для сканирования элементе поверхности цилиндрического или плоского объекта (стреляных пуль и гильз). Способ сканирования изображений микрорельефа боковых поверхностей стреляных пуль и гильз включает сканирование посредством видеокамеры с ПЗС матрицей отдельных прямоугольных фрагментов боковой поверхности объекта, дальнейшую обработку полученной информации и последующий синтез полной развертки, при этом фокусировку объектива видеокамеры с ПЗС матрицей на выбранном для сканирования элементе поверхности объекта производят ее поступательным перемещением вдоль оптической оси объектива, а на боковой поверхности объекта одновременно формируют два световых штриха, которые на ПЗС матрице изображены в виде двух отрезков изогнутой формы, расположенных по разные стороны от линии наилучшей фокусировки, причем вершины упомянутых отрезков отстоят от упомянутой линии на величины А и В, затем по значениям величин А и В определяют величину Х по выведенной формуле, рассчитывают β-угол наклона деформированного элемента сканируемой поверхности, после чего определяют величину расфокусировки и единожды производят корректировку положения каретки фокусировки до совпадения вершин упомянутых отрезков, далее повторяют процесс фокусировки для других положений боковой поверхности объекта.
Устройство сканирования изображений микрорельефа боковых поверхностей стреляных пуль и гильз автоматизированного баллистического идентификационного комплекса содержит осветители, объектодержатель, механизмы продольного сканирования, поворота объекта и фокусировочного узла, систему фокусировки, видеокамеру с ПЗС-матрицей, АЦП и ЭВМ. Устройство снабжено дополнительным щелевым осветителем, который расположен оппозитно основному щелевому осветителю относительно оптической оси объектива видеокамеры, при этом видеокамера с ПЗС матрицей и закрепленными на ней осветителем, основным и дополнительным щелевыми осветителями установлена с возможностью продольного перемещения вдоль оптической оси объектива видеокамеры. 2 н.п. ф-лы, 5 ил., 1 табл.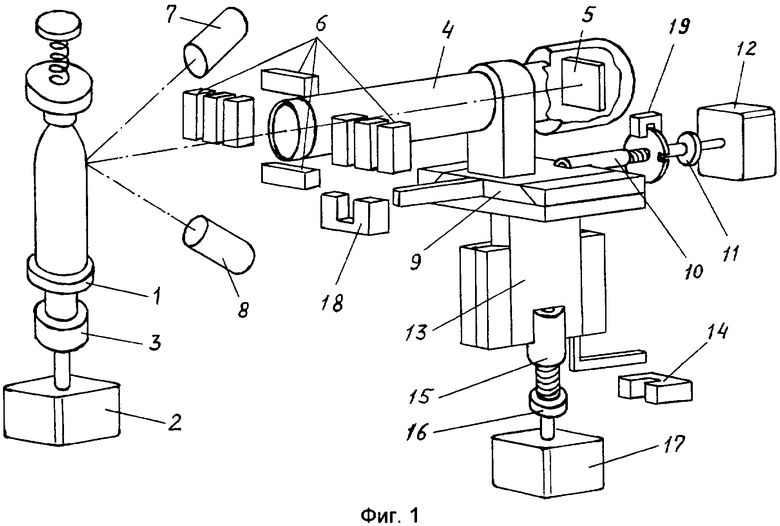
X=A·[1+(B-A)/(B+A)]/tg(α),
где α - угол наклона щелевых осветителей к оптической оси объектива видеокамеры,
и определяют β - угол наклона деформированного элемента сканируемой поверхности по формуле
β=arctg[(B+A)/(B-A)·tg(α)],
после чего определяют величину расфокусировки и одной подвижкой производят корректировку положения каретки фокусировки до совпадения вершин упомянутых отрезков, далее повторяют процесс фокусировки для других положений боковой поверхности объекта.
| СПОСОБ ИДЕНТИФИКАЦИИ НАРЕЗНОГО ОГНЕСТРЕЛЬНОГО ОРУЖИЯ ПО СЛЕДАМ НА ПУЛЯХ | 2001 |
|
RU2221219C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАЗВЕРТКИ ПОВЕРХНОСТИ ПУЛЬ И ГИЛЬЗ НАРЕЗНОГО СТРЕЛКОВОГО ОРУЖИЯ, УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАЗВЕРТКИ ЦИЛИНДРИЧЕСКИХ ТЕЛ | 1997 |
|
RU2130628C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАЗВЕРТКИ ПОВЕРХНОСТИ ДЕФОРМИРОВАННЫХ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2155378C1 |
| 1972 |
|
SU433666A3 | |
| US 5659489 A, 19.08.1997 | |||
| US 6219437 A, 17.04.2001. | |||

