Изобретение относится к области гравитационно-волновой астрономии и может быть использовано для определения угловых координат гравитационно-волновых источников.
Известен способ [1] отождествления источника по его гравитационному излучению - извлечение из принятого сигнала позиционной информации об источнике - основанный на схеме совпадений при функционировании сети гравитационных антенн. Способ предполагает использование большебазовых лазерно-интерферометрических и твердотельных антенн, предназначенных для детектирования импульсного гравитационного излучения от вспышечных источников. Это и является ограничением возможности способа.
Известен способ [2] определения угловых координат источника излучения, основанный на измерении разности фаз сигнала от источника излучения, принятого в двух пространственно разнесенных точках, который наиболее близок к заявляемому способу и может быть принят в качестве ПРОТОТИПА. Способ по прототипу предполагает измерение фазы принимаемого сигнала от источника излучения в двух разнесенных в пространстве (на Земле) точках и по разности между измеренными фазами и известному расстоянию (базы) между этими точками определение направления на источник излучения относительно линии, соединяющей эти точки, - фазоразностный метод. Точность измерения угловой координаты зависит от соотношения размера базы Б и длины волны λ принимаемого сигнала от источника, которое должно удовлетворять условию: Б ≳ λ. Этот способ может быть применен для определения угловых координат гравитационно-волновых источников. Однако в случае низкочастотных периодических гравитационно-волновых источников типа двойных релятивистских астрофизических объектов, у которых λ ≳ 1011 м, упомянутое требование в земных условиях не выполнимо. И это является существенным недостатком прототипа.
Задача, на решение которой направлено заявляемое изобретение, заключается в разработке способа определения угловых координат двойных релятивистских астрофизических объектов низкочастотного периодического гравитационного излучения относительно плоскости эклиптики и точки весеннего равноденствия, по возможности с максимально допустимой (для данных Б и λ) точностью. Это, в свою очередь, позволит также провести отождествление вычисленных угловых координат с угловыми координатами, измеренными в оптическом и (или) радиодиапазонах.
Сущность изобретения заключается в том, что при определении угловых координат гравитационно-волновых источников по прототипу, основанный на измерении разности фаз сигнала от источника излучения, принятого в двух пространственно разнесенных точках, при годовом орбитальном обращении Земли с гравитационно-волновым детектором последовательно в произвольно фиксированные моменты времени осуществляют N циклов когерентного накопления детектируемого гравитационно-волнового сигнала, а в каждом из N циклов, с учетом движения Земли, выделяют детектируемый гравитационно-волновой сигнал путем когерентного накопления его n периодов и запоминают фазу накопленного гравитационно-волнового сигнала в каждом N-м цикле, а между запомненными по выделенным в i- и j-х циклах фазами сигналов через интервал времени, равный времени орбитального прохождения Землей расстояния, соизмеримого с длиной волны детектируемого гравитационно-волнового сигнала, и равного целому числу m периодов этого сигнала, измеряют разность фаз и по измеренной величине разности фаз определяют угловое положение источника гравитационного излучения относительно линии, соединяющей положения гравитационно-волнового детектора в пространстве при орбитальном движении Земли в моменты i- и j-х циклов когерентного накопления гравитационно-волнового сигнала, повторяют M раз измерение разности фаз между накопленными гравитационно-волновыми сигналами при последующих положениях гравитационно-волнового детектора при орбитальном движении Земли и осуществляют M раз определение углового положения гравитационно-волнового источника относительно той же, перемещающейся в плоскости орбитального движения Земли, линии и занимающей в этой плоскости M положений и по всем значениям углового положения гравитационно-волнового источника, определенных при годовом орбитальном перемещении гравитационно-волнового детектора, вычисляют угловые координаты источника детектируемого гравитационно-волнового сигнала относительно плоскости эклиптики и точки весеннего равноденствия.
В отличие от известного способа, где разность фаз измеряют между сигналом от источника, одновременно принятым в двух разнесенных точках (на Земле) с неперемещаемой базой в пространстве между ними, в заявляемом изобретении разность фаз измеряют между сигналом от источника, принятым последовательно во времени (при последовательном размещении в пространстве при орбитальном обращении Земли) гравитационно-волновым (ГВ) детектором. Кроме того, в заявляемом способе база, сформированная между одним и тем же ГВ-детектором, находящимся в разных точках пространства в разное время, перемещается в плоскости эклиптики относительно гравитационно-волнового источника (ГВИ). Последнее обстоятельство позволяет не только определить угловые координаты ГВИ (эклиптические широту и долготу) при максимально возможной базе на орбите (с учетом длины волны детектируемой ГВ), но и с максимальной возможностью уточнить угловые координаты при годовом обращении Земли.
При разработке заявляемого способа по определению угловых координат двойных релятивистских астрофизических объектов ГИ имелось в виду, что безразмерная амплитуда h ГВ-сигнала от этих источников меньше, как минимум на 2-3 порядка, по сравнению с амплитудой импульсного ГВ-сигнала от вспышечных источников. Отсюда вытекает необходимость их достаточно длительного накопления до требуемого отношения сигнал/шум. В [3] в качестве ГВ-детектора низкочастотных периодических ГВ-сигналов от двойных релятивистских астрофизических объектов с временем существования порядка 1013 с использованы компактные двухрезонаторные с геометрически и (или) пространственно неэквивалентными контурами с общей активной средой лазерные системы. Такие ГВ-детекторы представляют возможность в качестве метода оптимальной обработки периодических сигналов использовать метод совместного длительного межпериодного и внутрипериодного накопления с помощью гребенчатых фильтров. Этот метод обеспечивает также запоминание (фиксацию) начальной фазы накапливаемого периодического ГВ-сигнала на момент включения фильтров.
Схема, поясняющая процесс определения угловых координат, представлена на чертеже.
Определение угловых координат рассмотрим на примере низкочастотного периодического ГВ-источника PSR 15377+1155 (двойной релятивистский астрофизический объект [4] ), у которого период гравитационного излучения Tg = 2,8921•103 с, а длина волны λg = 8,678•1011 м.
Принимаемый ГВ-сигнал запишем в виде [2]:
в точке 1: s1(t) = hcos(ωgt+Φg),
в точке 2: 
где Φg(t) - случайная начальная фаза ГВ-сигнала с частотой ωg и длиной волны λg;
h - безразмерная амплитуда ГВ-сигнала;
θ - направление на ГВИ, относительно линии, соединяющей точки 1 и 2;
Б - база (расстояние между положениями ГВ-детектора на орбите в точках 1 и 2);
точки 1 и 2 - положения (в пространстве) ГВ-детектора в моменты начала i- и j-го циклов накопления соответственно, в которых происходит измерение и запоминание фазы сигнала в произвольно фиксированные моменты времени. Для выделения (когерентного накопления) детектируемого периодического ГВ-сигнала (с учетом движения Земли) на фоне помех и запоминания его фазы используют межпериодный и внутрипериодный гребенчатые фильтры накопления [3].
Измеренная разность фаз ΔΦизм между запомненными фазами сигнала, измеренными ГВ-детектором в точках 1 и 2, будет равна [2]
откуда
Базу Б определим по формуле
где RОЗ = 1,495978762•1011 м - радиус орбиты Земли (ОЗ);
Tобр = 3,15569•107 с - время обращения (обр) Земли (1 год);
Tg, λg - период и длина волны детектируемого ГВ-сигнала, угловые координаты источника которого определяются;
m = 1, 2, 3 ... - количество периодов ГВ-сигнала на временной базе TБ = mTg.
В фиксированный момент времени t1 (точка 1 на чертеже) в i-м цикле включают блок обработки сигналов ГВ-детектора [3] на время накопления Tн = nTg = 621•2,8927•103 с ≈ 20,8 суток (n = 621 - количество периодов накапливаемого ГВ-сигнала в одном цикле) для получения на выходе ГВ-детектора отношения сигнал/шум qвых.н = 10 (для достоверного выделения детектируемого ГВ-сигнала на фоне помех) и выключают в момент времени t1+Tн. Метод обработки сигналов [3] с учетом априорной информации о движении Земли и угловых координат ГВИ в радио или оптическом диапазонах обеспечивает когерентное накопление ГВ-сигнала с запоминанием его фазы на входе ГВ-детектора на произвольно фиксированный момент времени t1. При обращении Земли по орбите в произвольно фиксированные моменты времени осуществляют N циклов накопления (также с запоминанием начальной фазы ГВ-сигнала в каждом цикле) с временем накопления Tн = nTg в каждом цикле, причем N•nTg = Tобр - Δt, где 0 ≅ Δt < Tg.
Разность фаз ΔΦизм между сигналом, принятым в точке 1 в момент времени t1 в i-м цикле, и тем же сигналом, принятым через временную базу TБ = mTg в j-м цикле в момент времени t2 (точка 2 на чертеже), зависит только от разности t2-t1 = mTg. С учетом требования выполнения соизмеримости Б и λg получаем, что m = 1735. Тогда база Б между точками 1 и 2, вычисленная по вышеприведенной формуле, равна Б = 1,424•1011 м, при этом mTg = 1,742•103 с ≈ 58,3 суток, а θ = arccos(0,97 ΔΦизм). Ошибка в измерении угла равна
где δΔΦизм - аппаратурная погрешность при измерении разности фаз. При δΔΦ/2π = 0,01 (что достижимо, поскольку инструментальная точность порядка 3% может быть реализована) получаем δθ = 0,01λg/Б = 60 мрад. За время Tобр = 1 год может быть получено M = 17 раз независимых измерений разности фаз, что приведет к точности измерений в  раз, т.е. δθгод = 60 мрад/
раз, т.е. δθгод = 60 мрад/  = 14,5 мрад.
= 14,5 мрад.
Процедура вычисления координат из множества измерений состоит из двух этапов: определение предварительных значений координат и уточнение предварительных значений.
Определим предварительные значения координат. Пусть p, q и r - единичные векторы направлений, определенные M раз между попарными положениями ГВ-детектора в различные моменты времени ti, tj (см. чертеж). Если эти векторы некомпланарны, можно однозначно определить направление на источник x по измерениям углов θp, θq и θr, решив систему уравнений:
p•x = cos θp, q•x = cos θq, r•x = cos θr,
где θp, θq и θr - углы между вектором x и векторами p, q и r соответственно.
Поскольку детектор находится на Земле, то все его положения практически лежат в одной плоскости - плоскости эклиптики. В этом случае вместо единственного решения получается пара решений, симметрично расположенных относительно плоскости эклиптики, т.е. у них одинаковая эклиптическая долгота λ, а эклиптические широты β различаются только знаком. Для нахождения этих решений достаточно иметь только два измерения - θp и θq.
Сориентируем прямоугольную систему координат так, чтобы первая координатная ось была направлена в точку весны, а третья - в северный полюс эклиптики. Для нахождения предварительных значений координат направления на источник принимают, что третьи компоненты векторов p и q равны нулю. Тогда система уравнений примет вид:
p1x1 + p2x2 = cos θp ;
q1x1 + q2x2 = cos θq.
Поскольку вектор x единичный, эту систему дополняют уравнением:
где знаки "+" и "-" относятся к решениям для северного и южного положений (относительно плоскости эклиптики) ГВ-источника соответственно.
Предварительные значения угловых эклиптических координат вычисляют по формулам
Для получения уточненных координат λ, β оценим значения поправок Δλ, Δβ: λ = λ0+Δλ; β = β0+Δβ.
Связь между угловыми эклиптическими координатами направления на ГВ-источник λ, β, координатами λi, βi, характеризующими направление i-го вектора, соединяющего два положения ГВ-детектора, и измеренным между этими направлениями углом θi, определяют из соотношения cosθi = sinβsinβi+cosβcosβicos(λ-λi).
Линеаризация этого уравнения приводит к следующему условному уравнению: aiΔλ+biΔβ+li = 0, где коэффициенты ai, bi и li имеют следующий вид:
ai = -cosβ0cosβisin(λ0-λi),
bi = cosβ0sinβi-sinβ0cosβicos(λo-λi),
li = sinθiΔθi.
Невязка Δθi находится по схеме "измеренное минус вычисленное"
Решение системы условных уравнений по методу наименьших квадратов позволяет получить наиболее вероятные значения поправок Δλ, Δβ, оценки точности этих поправок и измерений θ.
Если поправки велики по сравнению с оценками их ошибок, то процедуру уточнения координат следует повторить, приняв в качестве исходных значений координат λ0, β0 полученные величины λ, β. Это необходимо для исключения влияния на результаты членов разложения второго и более высоких порядков.
Таким образом, заявляемый способ выгодно отличается от прототипа возможностью определения угловых координат низкочастотных (длинноволновых) периодических ГВ-источников путем формирования разности фаз между сигналами, принятыми от ГВ-источника последовательно во времени при последовательном размещении в пространстве ГВ-детектора при орбитальном перемещении Земли.
Источники информации
1. Милюков В.К., Руденко В.Н., // Итоги науки и техники ВИНИТИ АН СССР, серия Астрономия, 1991, т. 41, с. 147-193.
2. Пестряков В. Б. Фазовые радиотехнические системы. - М.: Сов. радио, 1968, 460 с. (прототип).
3. Balakin A.B., Murzakhanov Z.G., Skochilov A.F. Gravitation & Cosmology, Moscow, Vol. 5, N 3 (19), 1999
4. G.H. Taylor, R.N. Manchester, A.G. Lyne. //Astrophysical Journal Supplement, 1993, Vol. 88, p. 529.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 1999 |
|
RU2167437C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2000 |
|
RU2171482C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2000 |
|
RU2171483C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ГРАВИТАЦИОННЫХ ВОЛН | 2007 |
|
RU2367983C2 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 1999 |
|
RU2156481C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2009 |
|
RU2413252C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2010 |
|
RU2431159C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2011 |
|
RU2475785C1 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 1999 |
|
RU2167397C2 |
| ЛАЗЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИЙ ДЕТЕКТОР ГРАВИТАЦИОННО-ИНДУЦИРОВАННОГО СДВИГА ЧАСТОТЫ ГЕНЕРАЦИИ | 1997 |
|
RU2116659C1 |
Использование: для определения угловых координат гравитационно-волновых источников. Сущность изобретения: при годовом орбитальном обращении Земли с гравитационно-волновым детектором последовательно в произвольно фиксированные моменты времени осуществляют N циклов когерентного накопления детектируемого гравитационно-волнового сигнала, а в каждом из N циклов с учетом движения Земли выделяют детектируемый гравитационно-волновой сигнал путем когерентного накопления его n периодов и запоминают фазу накопленного гравитационно-волнового сигнала в каждом N-м цикле. Повторяют М раз измерение разности фаз между накопленными гравитационно-волновыми сигналами при последующих положениях гравитационно-волнового детектора при орбитальном движении Земли и осуществляют М раз определение углового положения гравитационно-волнового источника относительно той же перемещающейся в плоскости орбитального движения Земли линии и занимающей в этой плоскости М положений. По всем значениям углового положения гравитационно-волнового источника, определенным при годовом орбитальном перемещении гравитационно-волнового детектора, вычисляют угловые координаты источника детектируемого гравитационно-волнового сигнала относительно плоскости эклиптики и точки весеннего равноденствия. Технический результат: определение угловых координат источника сигнала в длинноволновом диапазоне гравитационного излучения. 1 ил.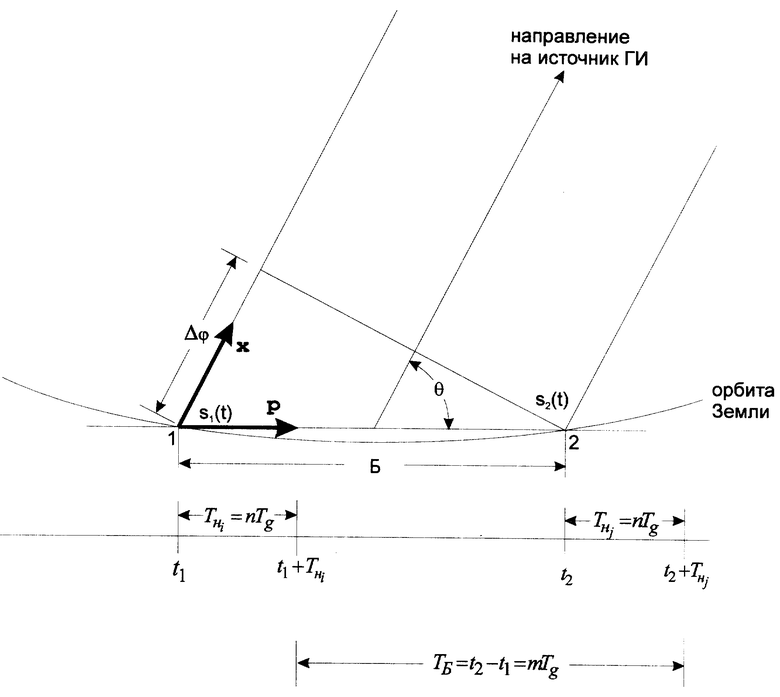
Способ определения угловых координат гравитационно-волнового источника, основанный на измерении разности фаз сигнала от источника излучения, принятого в двух пространственно разнесенных точках, отличающийся тем, что при годовом орбитальном обращении Земли с гравитационно-волновым детектором последовательно в произвольно фиксированные моменты времени осуществляют N циклов когерентного накопления детектируемого гравитационно-волнового сигнала, а в каждом из N циклов с учетом движения Земли выделяют детектируемый гравитационно-волновой сигнал путем когерентного накопления его n периодов и запоминают фазу накопленного гравитационно-волнового сигнала в каждом N-м цикле, а между запомненными по выделенным в i- и j-x циклах фазами сигналов через интервал времени, равный времени орбитального прохождения Землей расстояния, соизмеримого с длиной волны детектируемого гравитационно-волнового сигнала и равного целому числу m периодов этого сигнала, измеряют разность фаз и по измеренной величине разности фаз определяют угловое положение источника гравитационного излучения относительно линии, соединяющей положения гравитационно-волнового детектора в пространстве при орбитальном движении Земли в моменты i- и j-x циклов когерентного накопления гравитационно-волнового сигнала, повторяют М раз измерение разности фаз между накопленными гравитационно-волновыми сигналами при последующих положениях гравитационно-волнового детектора при орбитальном движении Земли и осуществляют М раз определение углового положения гравитационно-волнового источника относительно той же перемещающейся в плоскости орбитального движения Земли линии и занимающей в этой плоскости М положений и по всем значениям углового положения гравитационно-волнового источника, определенных при годовом орбитальном перемещении гравитационно-волнового детектора, вычисляют угловые координаты источника детектируемого гравитационно-волнового сигнала относительно плоскости эклиптики и точки весеннего равноденствия.
| ПЕСТРЯКОВ В.Б | |||
| Фазовые радиотехнические системы - М.: Сов | |||
| Радио, 1968, с.460 | |||
| БРАТИНСКИЙ В.Б., ПОЛНАРЕВ А.Г | |||
| Удивительная гравитация | |||
| -М.: Наука, 1985, с.77 | |||
| US 3554033 А, 12.01.1971 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ГРАВИТАЦИОННОГО ВЗАИМОДЕЙСТВИЯ ТЕЛ | 1998 |
|
RU2124743C1 |
