Изобретение относится к способам и устройствам для предотвращения помпажа и срыва потока в турбокомпрессорах при помощи наборов координат, инвариантных по отношению к условиям на всасывании. Предметом изобретения также является измерение расстояния от рабочей точки компрессора до границы помпажа.
Нестабильные или колебательные процессы внутри турбокомпрессора, такие как помпаж или срыв потока, пагубно влияют как на оборудование, так и на весь технологический процесс. Расстояние рабочей точки компрессора до зоны указанных нежелательных процессов определяется при помощи специальных отслеживающих устройств, работающих на основе алгоритмов регулирования, поддерживающих значения расхода компримируемого газа в пределах зоны стабильной работы, предотвращая помпаж и срыв потока.
Помпажное регулирование осуществляется при помощи аналоговых входных сигналов, посылаемых от нескольких устройств, подключенных к разным частям системы, в которую включен компрессор.
Из большого разнообразия сигналов используется набор сигналов, вызывающих необходимое регулирующее воздействие (рециркуляцию или выпуск газа в атмосферу) в ответ на отклонение процесса до того, как значение расхода достигает линии помпажа.
Используемые в настоящее время параметры регулирования могут быть разделены на две категории: помпажные параметры, инвариантные к условиям на всасывании, и параметры, зависящие от этих условий. Параметры, не зависящие от условий на всасывании, состоят из различных комбинаций приведенного расхода и отношения давлений или объемного расхода, деленного на частоту вращения, и политропического напора, деленного на квадрат частоты вращения. Для расчета указанных параметров необходимо знать по крайней мере давление на нагнетании и на всасывании и разность Δpo давлений, характеризующую расход. Преимущество предлагаемого способа состоит в том, что он не ограничивается этой комбинацией сигналов от датчиков. Стратегии регулирования можно также осуществлять, например, с помощью таких параметров, как мощность, давление на всасывании и нагнетании. Кроме того, принципы, лежащие в основе настоящего изобретения, могут использоваться в стратегиях поиска неисправностей и стратегиях выживания, поддерживающих компрессор в работе при возникновении неблагоприятных ситуаций.
Во второй категории параметров (зависящих от условий на всасывании) часть параметров, как и в первой группе, основана на измерениях давления и расхода. В другой же части параметров вместо величин расхода и давления на нагнетании используются мощность и частота вращения. Таким образом, регулирование может осуществляться даже при отсутствии информации по расходу или давлению на нагнетании.
Преимущество предлагаемого способа перед существующими состоит в том, что он не зависит от изменения условий на всасывании.
Таким образом, необходим способ противопомпажного регулирования, обеспечивающий гибкое использование разнообразных стратегий регулирования, в том числе стратегий поиска неисправностей и выживания. Кроме того, необходимо устройство для противопомпажного регулирования, функционирующее независимо от условий на всасывании, способное управлять работой компрессоров, недооснащенных необходимыми датчиками или оснащенных неисправными датчиками.
На традиционной карте газодинамических характеристик турбокомпрессора (фиг. 5) изображены зоны помпажа и стабильной работы, разделенные так называемой границей помпажа. На карте также показана "контрольная линия помпажа", расстояние от которой до границы помпажа мы назовем зоной безопасности. Если рабочая точка компрессора, пересекая "контрольную линию помпажа", попадает в зону безопасности, противопомпажный регулятор вычисляет значение рассогласования между "контрольной линией" и рабочей точкой и использует вычисленное значение в ПИ-контуре регулирования. Выход контура используется для управления электромеханическим устройством, например, клапаном, обеспечивающим рециркуляцию или выпуск газа в атмосферу для поддержания значения расхода на безопасном уровне. При увеличенной зоне безопасности частота и продолжительность открытия клапана увеличиваются, что приводит к снижению эффективности процесса, в который включен компрессор. В то же время, если зона слишком узка, снижается надежность противопомпажного регулирования.
Таким образом, очевидно, что можно достигнуть значительных экономических преимуществ, если при оптимально узкой зоне безопасности обеспечить улучшенное противопомпажное регулирование, уменьшив тем самым нарушения процесса. Кроме того, в результате предлагаемого способа удается повысить экономическую эффективность компрессора, увеличить интервалы между запланированными остановами, а также сократить годовые затраты.
Из вышесказанного следует необходимость в легком и точном определении (используя инвариантные координатные системы), в какой точке возникают колебания при различных условиях на всасывании.
В Европейской патентной заявке N 0500195 описан способ измерения расстояния от рабочей точки турбокомпрессора до границы помпажа указанного турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, который включает определение указанной границы помпажа для турбокомпрессора, вычисление величины, характеризующей рабочую точку турбокомпрессора, сравнение величины, характеризующей рабочую точку турбокомпрессора, с указанной границей помпажа, выработку сигнала, соответствующего положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, и управление турбокомпрессором на основе этого сигнала.
В этой заявке также описано устройство для определения положения рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, содержащее средства вычисления уставки в заранее заданном положении относительно границы помпажа турбокомпрессора, средства вычисления величины, характеризующей рабочую точку, средства сравнения величины, характеризующей рабочую точку, с указанной границей помпажа и выработки сигнала по положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора и средства управления турбокомпрессором на основе указанного сигнала.
В соответствии со способом, описанным в указанной заявке, определяют параметр Srel, представляющий собой наклон линии, проходящей через первоначальную и рабочую точки компрессора по отношению к наклону линии границы помпажа, и вычисляемый по формуле:
Srel= f(N,α)hred/q
где hred - приведенный политропический напор, определяемый из уравнения:
hred= (R
где σ =logRo/logRc;
Ro - отношение температуры на нагнетании и температуры на всасывании, Td/Ts;
Rc - отношение давления на нагнетании и давления на всасывании, pd/ps.
Приведенный объемный расход на всасывании в квадрате определяют по формуле:
q
где Δpo - сигнал от расходомерного устройства, работающего на принципе перепада давления, например пластина с отверстием или трубка Вентури.
Переменные величины N и α пропорциональны соответственно скорости вращения и углу поворота входного направляющего аппарата.
Относительный наклон Srel используют в качестве индикации положения рабочей точки относительно линии границы помпажа. Следует отметить, что Srel приближается к единице, когда рабочая точка находится на линии помпажа. Величина Srel уменьшается от единицы по мере перемещения рабочей точки от линии помпажа вправо в зону безопасной работы. Следовательно, величина, превышающая единицу, показывает, что компрессор находится в помпаже. Действие системы пропорционально-интегрального контроля основано на величине Srel.
При регулировании турбокомпрессора в соответствии с указанной Европейской патентной заявкой используются параметры, зависящие от условий на всасывании, и необходимо наличие соответствующего большого количества датчиков, при этом выход из строя одного из датчиков приводит к нарушению точности регулирования.
Задачей предлагаемого изобретения является создание способа и устройства для обеспечения защиты турбокомпрессоров от разрушительных процессов, таких как помпаж и срыв потока, на основе применения различных систем координат, инвариантных к условиям на всасывании, с использованием небольшого количества датчиков.
Решение поставленной задачи обеспечено созданием способа измерения расстояния от рабочей точки турбокомпрессора до границы помпажа указанного турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, который включает определение указанной границы помпажа для турбокомпрессора, вычисление величины, характеризующей рабочую точку турбокомпрессора, сравнение величины, характеризующей рабочую точку турбокомпрессора, с указанной границей помпажа, выработку сигнала, соответствующего положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, и управление турбокомпрессором на основе этого сигнала, при этом указанную границу помпажа для турбокомпрессора определяют как функцию приведенной мощности Pr/ks, и величину, характеризующую рабочую точку турбокомпрессора, вычисляют как функцию приведенной мощности Pr/ks.
Таким образом, возможность определения границы помпажа турбокомпрессора как функции приведенной мощности Pr/ks и вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
При сравнении величины, характеризующей рабочую точку турбокомпрессора, с границей помпажа могут вычислять уставку на заранее заданном расстоянии от границы помпажа и сравнивать указанную величину с этой уставкой.
В этом способе границу помпажа могут определять так же, как функцию одного из следующих параметров: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rс давлений, положения α входного направляющего аппарата, параметра Ne2/ks, эквивалентного приведенной частоте вращения.
Границу помпажа могут определять так же, как функцию одного из следующих параметров, отличного от выбранного выше параметра: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rc давлений, положения α входного направляющего аппарата, параметра Ne2/ks, эквивалентного приведенной частоте вращения.
При этом заранее заданное положение уставки относительно границы помпажа могут изменять в процессе работы турбокомпрессора.
Положение рабочей точки могут определять как функцию отношения значения приведенной мощности Pr/ks к функции второго параметра, умноженного на функцию третьего параметра.
Положение рабочей точки могут определять путем деления значения приведенной мощности Pr/ks (первого параметра) на функцию второго параметра и умножения на функцию третьего параметра (если таковой имеется) минус единица, при этом вторую функцию формируют так, чтобы соответствующим образом характеризовать первый параметр относительно границы помпажа.
Решение поставленной задачи обеспечено также созданием устройства для определения положения рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, которое содержит средства вычисления уставки в заранее заданном положении относительно границы помпажа турбокомпрессора, средства вычисления величины, характеризующей рабочую точку турбокомпрессора, средства сравнения величины, характеризующей рабочую точку турбокомпрессора, с указанной границей помпажа и выработки сигнала по положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора и средства управления турбокомпрессором на основе указанного сигнала, при этом указанные средства вычисления уставки содержат средства вычисления уставки относительно границы помпажа турбокомпрессора как функции приведенной мощности Pr/ks, а средства вычисления величины, характеризующей рабочую точку турбокомпрессора, содержат средства вычисления этой величины как функции приведенной мощности Pr/ks.
Таким образом, наличие средств определения границы помпажа турбокомпрессора как функции приведенной мощности Pr/ks и средств вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
В этом устройстве указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α или Ne2/ks. Кроме того, указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α или Ne2/ks, отличного от выбранного выше параметра.
Решение поставленной задачи обеспечено также созданием способа измерения расстояния от рабочей точки турбокомпрессора до границы помпажа указанного турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, который включает определение указанной границы помпажа для турбокомпрессора, вычисление величины, характеризующей рабочую точку турбокомпрессора, сравнение величины, характеризующей рабочую точку турбокомпрессора, с указанной границей помпажа, выработку сигнала, соответствующего положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, и управление турбокомпрессором на основе этого сигнала, при этом указанную границу помпажа для турбокомпрессора определяют как функцию приведенного вращающего момента Tr/ks, и величину, характеризующую рабочую точку турбокомпрессора, вычисляют как функцию приведенного вращающего момента Tr/ks.
Таким образом, возможность определения границы помпажа турбокомпрессора как функции приведенного вращающего момента Tr/ks и вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
При сравнении положения рабочей точки турбокомпрессора с границей помпажа могут вычислять уставку на заранее заданном расстоянии от границы помпажа и сравнивать указанную величину с этой уставкой.
В этом способе границу помпажа могут определять так же, как функцию одного из следующих параметров: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rc давлений, положения α входного направляющего аппарата, параметра Ne2/ks, эквивалентного приведенной частоте вращения.
Границу помпажа могут определять так же, как функцию одного из следующих параметров, отличного от выбранного выше параметра: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rc давлений, положения α входного направляющего аппарата, параметра Ne2/ks, эквивалентного приведенной частоте вращения.
При этом заранее заданное положение уставки относительно границы помпажа могут изменять в процессе работы турбокомпрессора.
Положение рабочей точки могут определять как функцию отношения значения приведенного вращающего момента Tr/ks к функции второго параметра, умноженного на функцию третьего параметра.
Положение рабочей точки могут определять путем деления значения приведенного вращающего момента Tr/ks (первого параметра) на функцию второго параметра и умножения на функцию третьего параметра минус единица; при этом вторую функцию формируют так, чтобы соответствующим образом характеризовать первый параметр относительно границы помпажа.
Решение поставленной задачи обеспечено также созданием устройства для определения положения рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, которое содержит средства вычисления уставки в заранее заданном положении относительно границы помпажа турбокомпрессора, средства вычисления величины, характеризующей рабочую точку, средства сравнения величины, характеризующей рабочую точку, с указанной границей помпажа и выработки сигнала по положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора и средства управления турбокомпрессором на основе указанного сигнала, при этом указанные средства вычисления уставки содержат средства вычисления уставки относительно границы помпажа турбокомпрессора как функции приведенного вращающего момента Tr/ks, а средства вычисления величины, характеризующей рабочую точку, содержат средства вычисления этой величины как функции приведенного вращающего момента Tr/ks.
Таким образом, наличие средств определения границы помпажа турбокомпрессора как функции приведенного вращающего момента Tr/ks и средств вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
В этом устройстве указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α или Ne2/ks. Кроме того, указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α или Ne2/ks, отличного от выбранного выше параметра.
Решение поставленной задачи обеспечено также созданием способа измерения расстояния от рабочей точки турбокомпрессора до границы помпажа указанного турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, который включает определение указанной границы помпажа для турбокомпрессора, вычисление величины, характеризующей рабочую точку турбокомпрессора, сравнение величины, характеризующей рабочую точку турбокомпрессора, с указанной границей помпажа, выработку сигнала, соответствующего положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, и управление турбокомпрессором на основе этого сигнала, при этом указанную границу помпажа для турбокомпрессора определяют как функцию параметра Ne2/ks, эквивалентного частоте вращения, и величину, характеризующую рабочую точку турбокомпрессора, вычисляют как функцию параметра Ne2/ks, эквивалентного частоте вращения.
Таким образом, возможность определения границы помпажа турбокомпрессора как функции параметра Ne2/ks, эквивалентного частоте вращения, и вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
При сравнении величины, характеризующей рабочую точку турбокомпрессора, с границей помпажа могут вычислять уставку на заранее заданном расстоянии от границы помпажа и сравнивать указанную величину с этой уставкой.
В этом способе границу помпажа могут определять так же, как функцию одного из следующих параметров: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rc давлений, положения α входного направляющего аппарата, приведенной мощности Pr/ks, приведенного вращающего момента Tr/ks.
При этом заранее заданное положение уставки относительно границы помпажа могут изменять в процессе работы турбокомпрессора.
Границу помпажа могут определять так же, как функцию одного из следующих параметров, отличного от выбранного выше параметра: приведенного политропического напора hr/ks, параметра qs2/ks, эквивалентного приведенному расходу компримируемого газа, отношения Rc давлений, положения α входного направляющего аппарата, приведенной мощности Pr/ks и приведенного вращающего момента Tr/ks.
Положение рабочей точки могут определять как функцию отношения значения параметра Ne2/ks, эквивалентного частоте вращения, к функции второго параметра, умноженного на функцию третьего параметра.
Положение рабочей точки могут определять путем деления значения параметра Ne2/ks, эквивалентного частоте вращения (первого параметра), на функцию второго параметра и умножения на функцию третьего параметра минус единица; при этом первую и вторую функции формируют так, чтобы соответствующим образом характеризовать первый параметр относительно границы помпажа.
Решение поставленной задачи обеспечено также созданием устройства для определения положения рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора, включающей множество точек, отделяющих область устойчивой работы турбокомпрессора от неустойчивой области, которое содержит средства вычисления уставки в заранее заданном положении относительно границы помпажа турбокомпрессора, средства вычисления величины, характеризующей рабочую точку, средства сравнения величины, характеризующей рабочую точку, с указанной границей помпажа и выработки сигнала по положению рабочей точки турбокомпрессора относительно границы помпажа турбокомпрессора и средства управления турбокомпрессором на основе указанного сигнала, при этом указанные средства вычисления уставки содержат средства вычисления уставки относительно границы помпажа турбокомпрессора как функции параметра Ne2/ks, эквивалентного частоте вращения, а средства вычисления величины, характеризующей рабочую точку турбокомпрессора, содержат средства вычисления этой величины как функции параметра Ne2/ks, эквивалентного частоте вращения.
Таким образом, наличие средств определения границы помпажа турбокомпрессора как функции параметра Ne2/ks, эквивалентного частоте вращения, и средств вычисления величины, характеризующей рабочую точку турбокомпрессора, как функции этого же параметра обеспечивает регулирование турбокомпрессоров для их защиты от помпажа на основе применения координат, инвариантных к условиям на всасывании.
В этом устройстве указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α, Pr/ks или Tr/ks. Кроме того, указанные средства вычисления уставки могут содержать также средства вычисления уставки относительно границы помпажа турбокомпрессора как функции одного из следующих параметров: hr/ks, qs2/ks, Rc, α, Pr/ks или Tr/ks, отличного от выбранного выше параметра.
В настоящем изобретении предложены новые удобные виды параметров, показывающих положение рабочей точки турбокомпрессора относительно границы помпажа. Все эти параметры основаны на трех аналогичных переменных. В настоящем изобретении предложено использование таких переменных, как приведенная мощность (Pr), приведенный вращающий момент (Tr) и параметр (Ne), эквивалентный частоте вращения, которые определяются по соответствующим формулам. Эти величины различными способами используются вместо приведенного политропического напора hred, приведенного расхода qred и скорости вращения N. Например, при определении помпажного параметра вместо приведенного напора может использоваться приведенная мощность:
S = f(Pr)/qred2,
где функцию f(Pr) задают так, что S приближается к единице на границе помпажа и монотонно уменьшается при перемещении рабочей точки от линии границы помпажа в зону безопасности. Другие примеры параметров для определения помпажа приведены в описании и формуле изобретения.
Преимущество настоящего изобретения по сравнению с Европейской патентной заявкой N 0500195 состоит в использовании различных измеряемых параметров турбокомпрессора. Если в турбокомпрессоре отсутствуют какие-либо данные, например из-за выхода из строя соответствующего измерительного устройства или если такое устройство вообще не установлено, алгоритм определения помпажа все же существует. Например, если турбокомпрессор не оборудован расходомерным устройством из-за отсутствия достаточно длинного прямого участка трубы, а привод турбокомпрессора оборудован датчиком мощности, то формула для определения помпажного параметра с использованием приведенного политропического напора hred и приведенной мощности Pr может быть следующей:
S=f(hred)/Pr,
так что при этом отсутствует необходимость в параметре, характеризующем расход турбокомпрессора, вычисляемый на основе разности Δpo давлений на расходомерном устройстве.
Чтобы включить в работу противопомпажный алгоритм, необходимо точно вычислить положение рабочей точки компрессора и расстояние от нее до границы помпажа, т. е. границы между зоной помпажа и зоной стабильности, используя получаемую от датчиков информацию. Указанное соотношение должно быть вычислено с использованием каждого из параметров на всасывании: давления, температуры, молекулярного веса, коэффициента сжимаемости и отношения удельных теплоемкостей. Таким образом, чтобы защитить компрессоры при различных параметрах на всасывании, необходимо построить границу помпажа в виде, инвариантном к условиям на всасывании или же делать поправки на эти условия.
С использованием анализа размерностей строятся инвариантные к условиям на всасывании трехмерные (без учета положения входного направляющего аппарата) и четырехмерные (с учетом положения входного направляющего аппарата) системы координат, при этом число Рейнольдса в расчет не принимается.
Стабильное положение рабочей точки находится в области, имеющей на одну координату меньше, чем пространство, к которому она принадлежит. Таким образом, при регулировании задача сводится к учету двух координат, если положение направляющего аппарата не учитывается, и трех координат, если оно учитывается.
Как показано ниже, существует несколько способов регулирования при помощи указанных систем координат (базовых координат), однако линейные и нелинейные комбинации координат также инвариантны к внешним условиям и, следовательно, могут быть использованы.
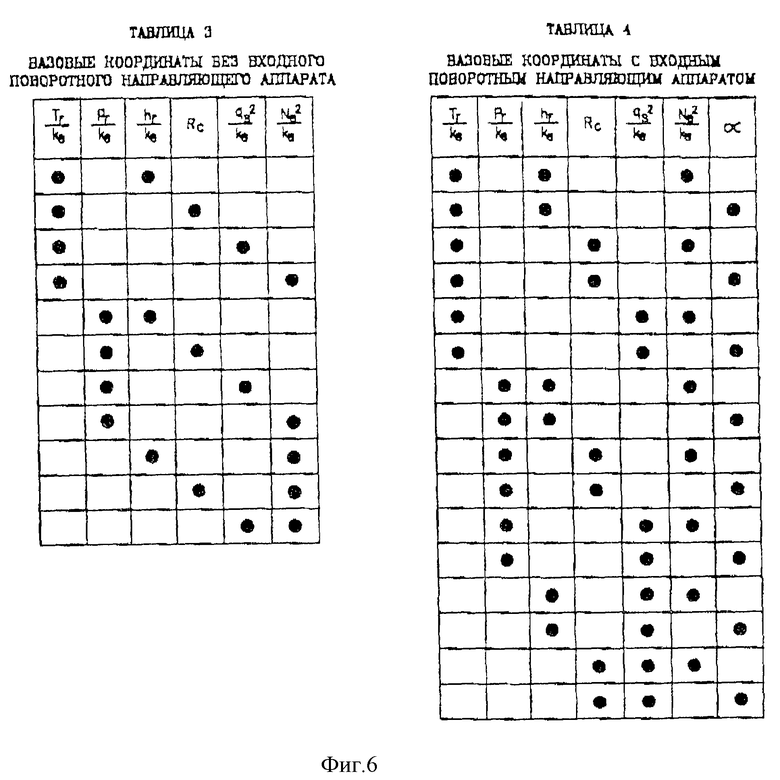
Табл. 1 и 2 на фиг. 6 содержат три новых параметра, не используемых в существующих способах и устройствах: Tr - приведенный вращающий момент, Pr - приведенная мощность и Ne2 - параметр, эквивалентный частоте вращения, каждый деленный на коэффициент ks. Tr и Pr используются в сочетании с Ne2. Кроме того, все три параметра комбинируются с одной-двумя оставшимися координатами (hr/ks, Rc, qs2/ks, α ) для создания двухмерной системы координат для турбокомпрессоров без управляемого входного направляющего аппарата или трехмерной системы для турбокомпрессоров с управляемым входным направляющим аппаратом.
Так как отношение удельных теплоемкостей (ks) в настоящий момент невозможно измерить, можно без большой потери точности допустить, что в большинстве случаев оно постоянно. Если необходима большая точность, указанное отношение можно вычислить из уже известных величин.
Из таблиц на фиг. 6 легко выбрать систему координат, обеспечивающую наиболее точные вычисления. Точные значения могут быть получены также, если в установке недостает отдельных датчиков, например, датчиков расхода, температуры или давления в нагнетании. Кроме обеспечения гибкости основной принятой стратегии регулирования, предлагаемый метод также позволяет использовать стратегии выживания, сводящие к минимуму потери в работе агрегата при отказе датчика или регулятора.
К дополнительным преимуществам предлагаемых способов относится отсутствие необходимости в измерении параметров на нагнетании. Точность регулирования также не зависит от условий на всасывании, кроме того, каждый из способов может быть сопоставлен с другими для обеспечения целостности концепции регулирования.
Основные инвариантные системы координат строятся на базе политропического напора, вращающего момента и мощности, как функций расхода, частоты вращения и положения входного направляющего аппарата. В другой системе координат вместо политропического напора используется степень сжатия.
В стратегиях регулирования могут также использоваться такие сочетания параметров, как мощность и политропический напор, вращающий момент и политропический напор, вращающий момент и отношение давлений.
Перечисленные и другие свойства, аспекты и преимущества настоящего изобретения разъясняются далее при помощи чертежей и пояснений к ним.
Фиг. 1 изображает турбокомпрессор и систему его противопомпажного регулирования, включая датчики.
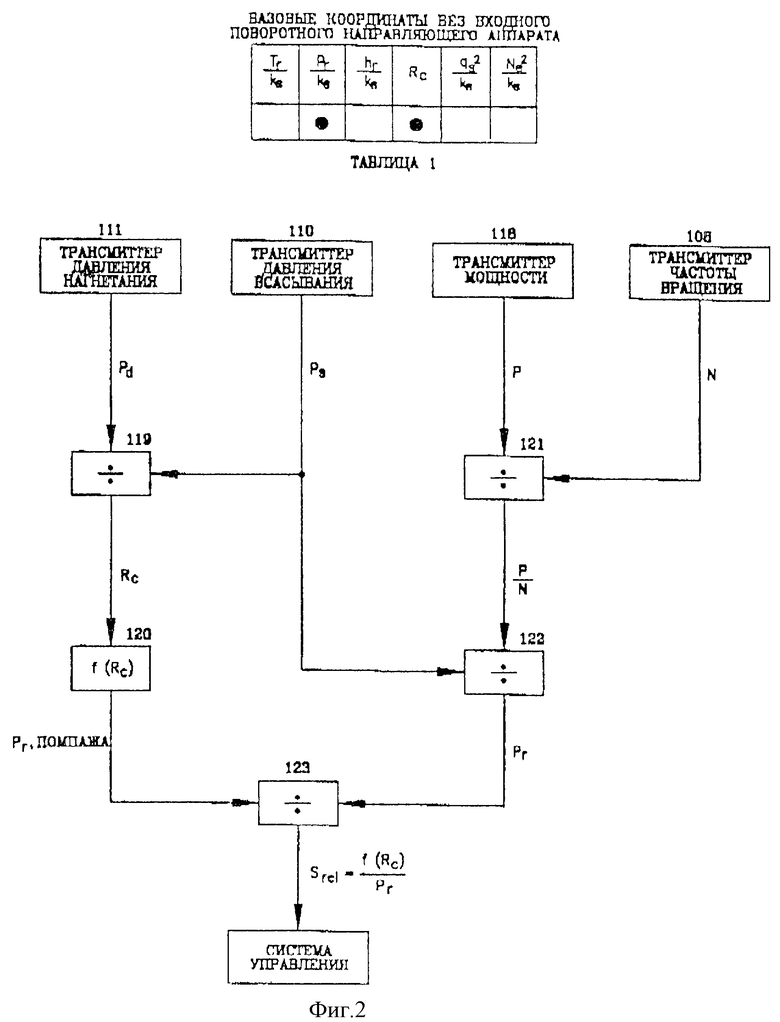
Фиг. 2 изображает схему расчетного модуля для турбокомпрессора без управляемого входного направляющего аппарата в базовых координатах (Pr, Rc).
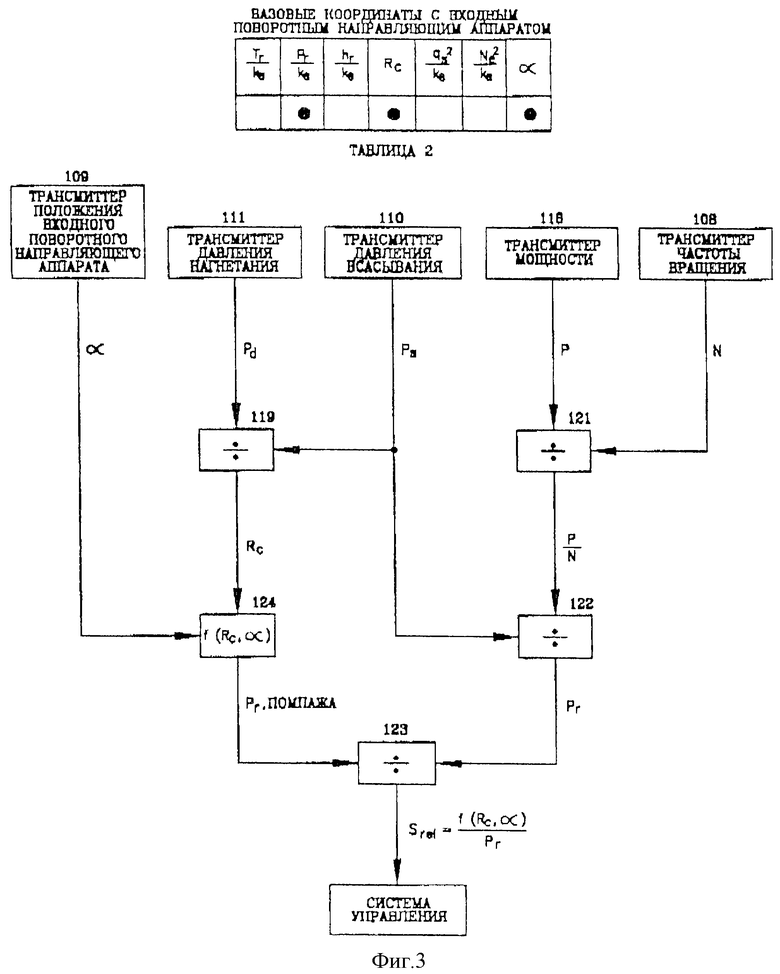
Фиг. З изображает схему расчетного модуля для турбокомпрессора с управляемым входным направляющим аппаратом в базовых координатах (Pr, Rc, α ).
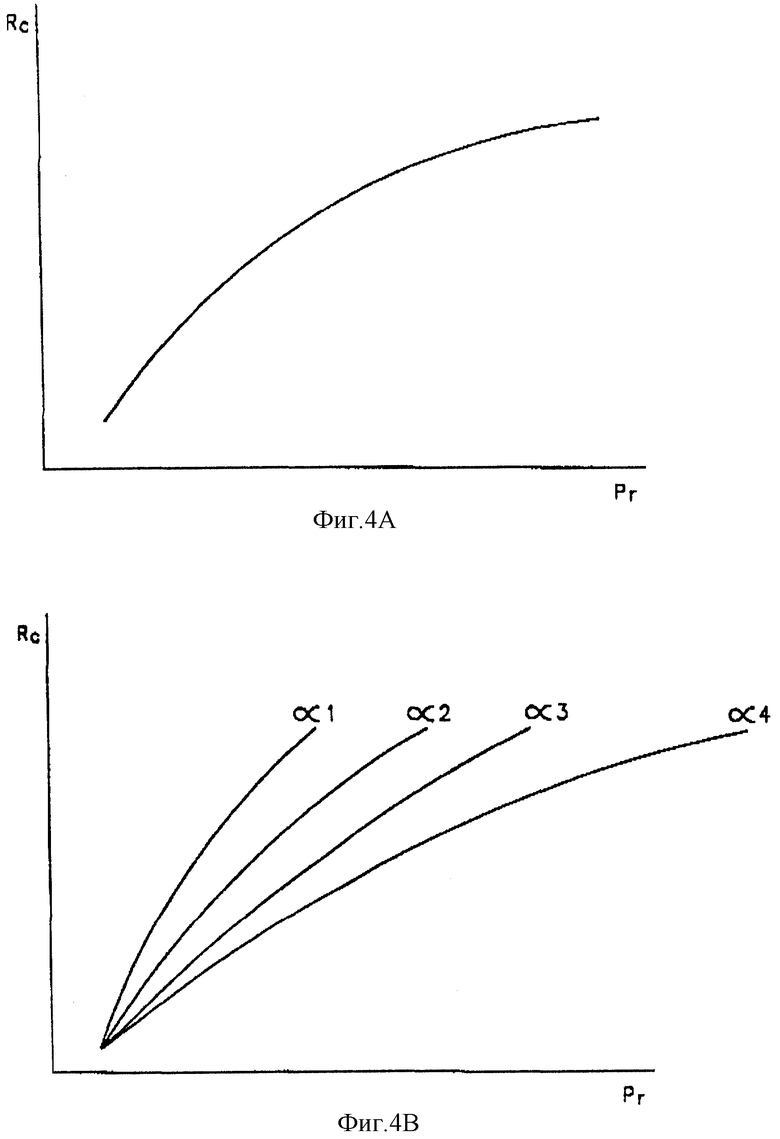
Фиг. 4А изображает границу помпажа турбокомпрессора без управляемого входного направляющего аппарата в базовых координатах (Pr, Rc).
Фиг. 4В изображает границу помпажа турбокомпрессора с управляемым входным направляющим аппаратом в базовых координатах (Pr, Rc, α ).
Фиг. 5 изображает карту газодинамических характеристик турбокомпрессора с различными рабочими режимами.
Фиг. 6 изображает две таблицы базовых координат: табл. 3 представляет комбинации базовых координат для турбокомпрессора с управляемым входным направляющим аппаратом, а табл. 4 - для турбокомпрессора без управляемого входного направляющего аппарата.
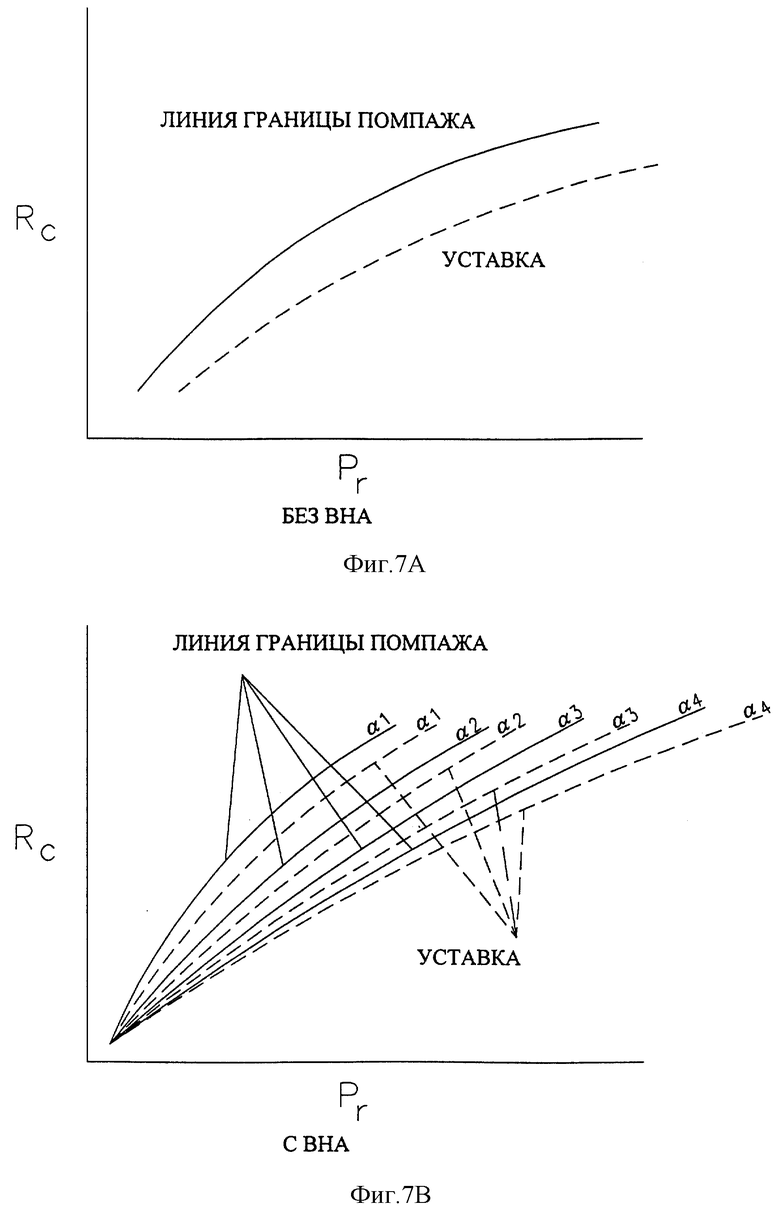
Фиг. 7А изображает линию границы помпажа и соответствующую ей линию уставки для турбокомпрессора без управляемого входного направляющего аппарата в базовых координатах (Pr, Rc).
Фиг. 7В изображает несколько линий границы помпажа для турбокомпрессора с управляемым входным направляющим аппаратом в базовых координатах (Pr, Rc, α ).
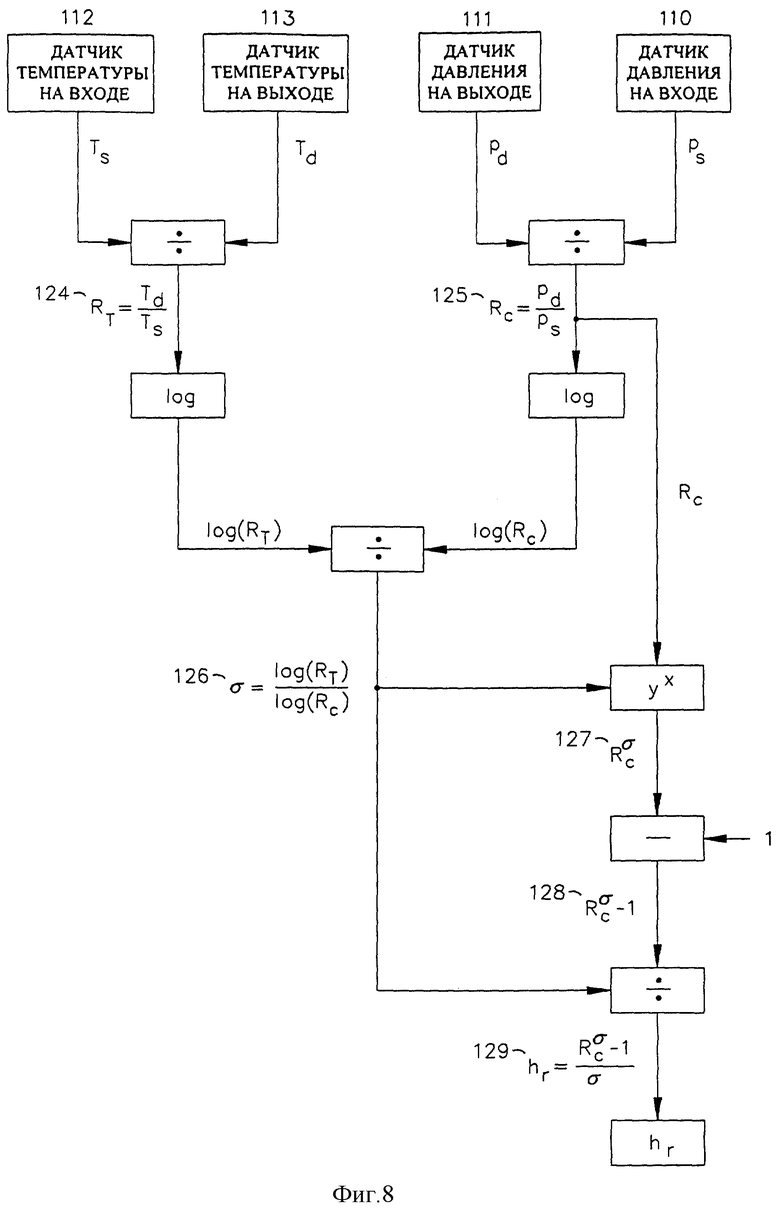
Фиг. 8 изображает схему расчетного модуля для вычисления приведенного напора hr.
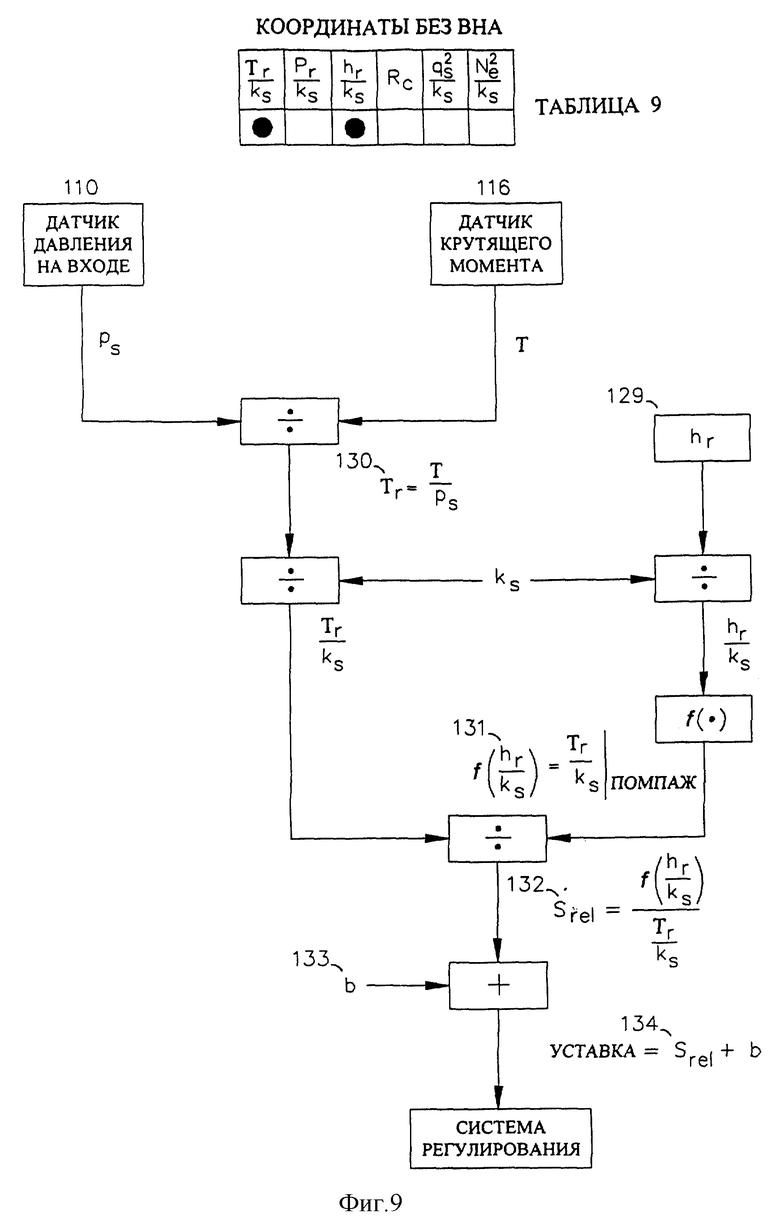
Фиг. 9 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Tr/ks, hr/ks).
Фиг. 10 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Tr/ks, Rc).
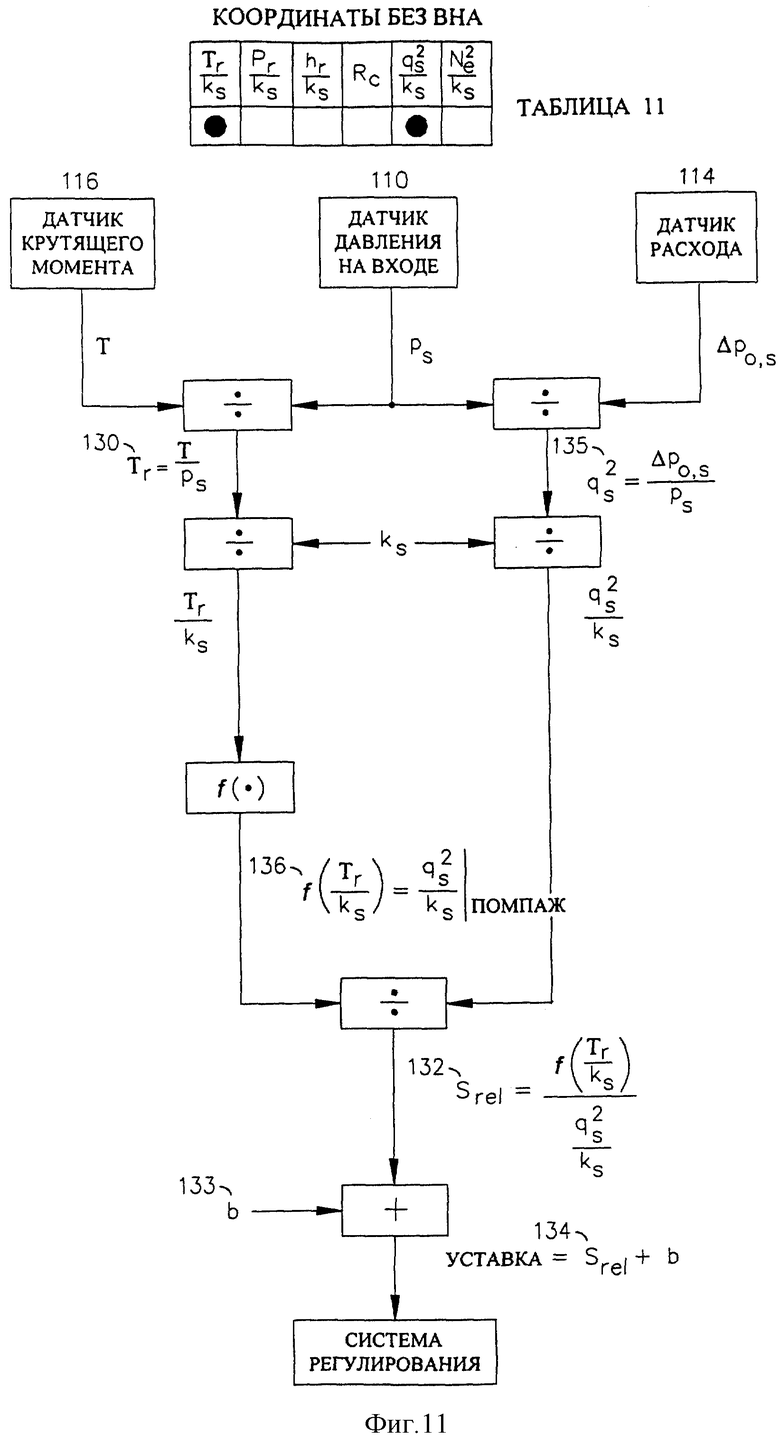
Фиг. 11 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Tr/ks, qs2/ks).
Фиг. 12 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Tr/ks, Ne2/ks).
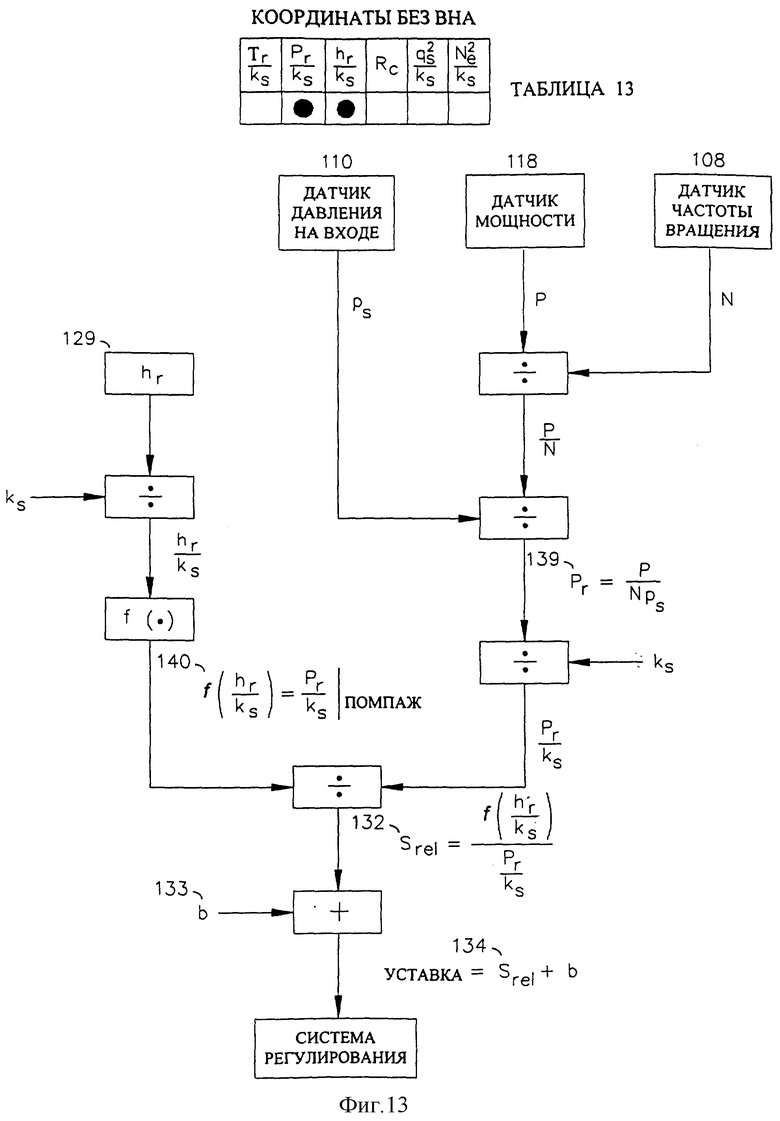
Фиг. 13 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Pr/ks, hr/ks).
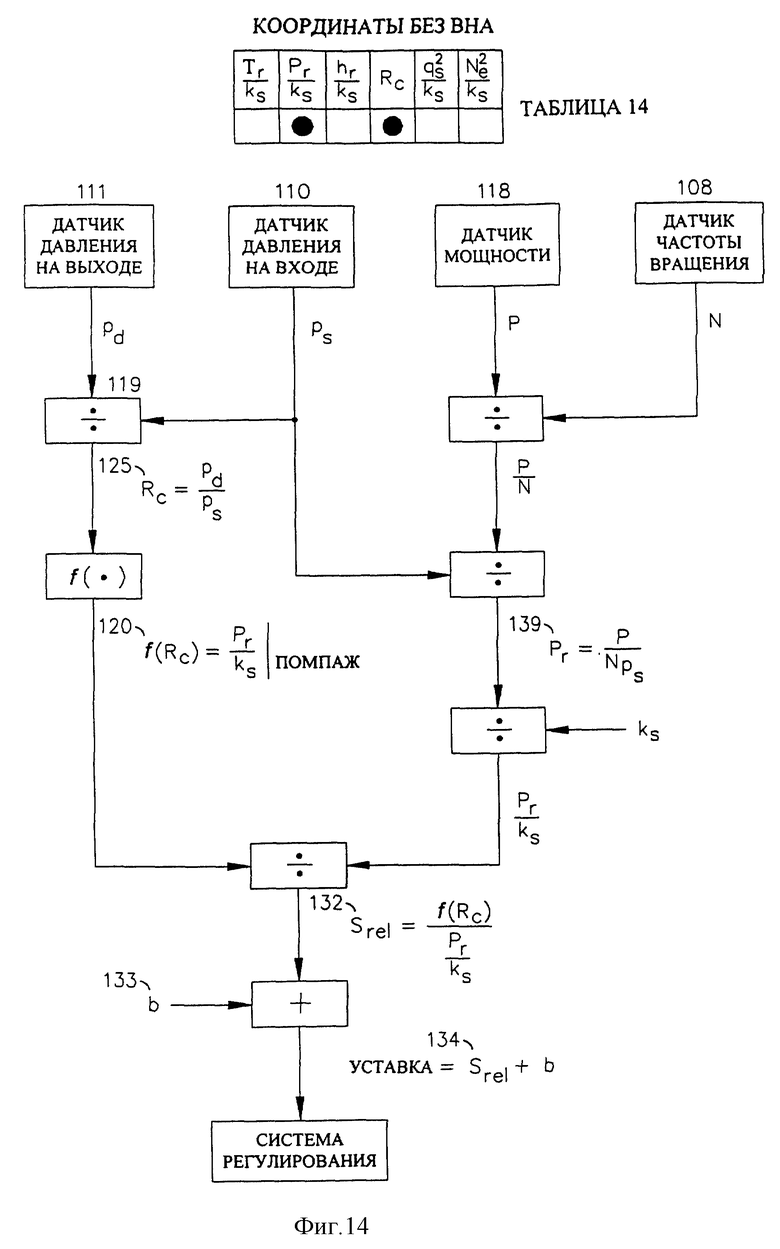
Фиг. 14 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Pr/ks, Rc).
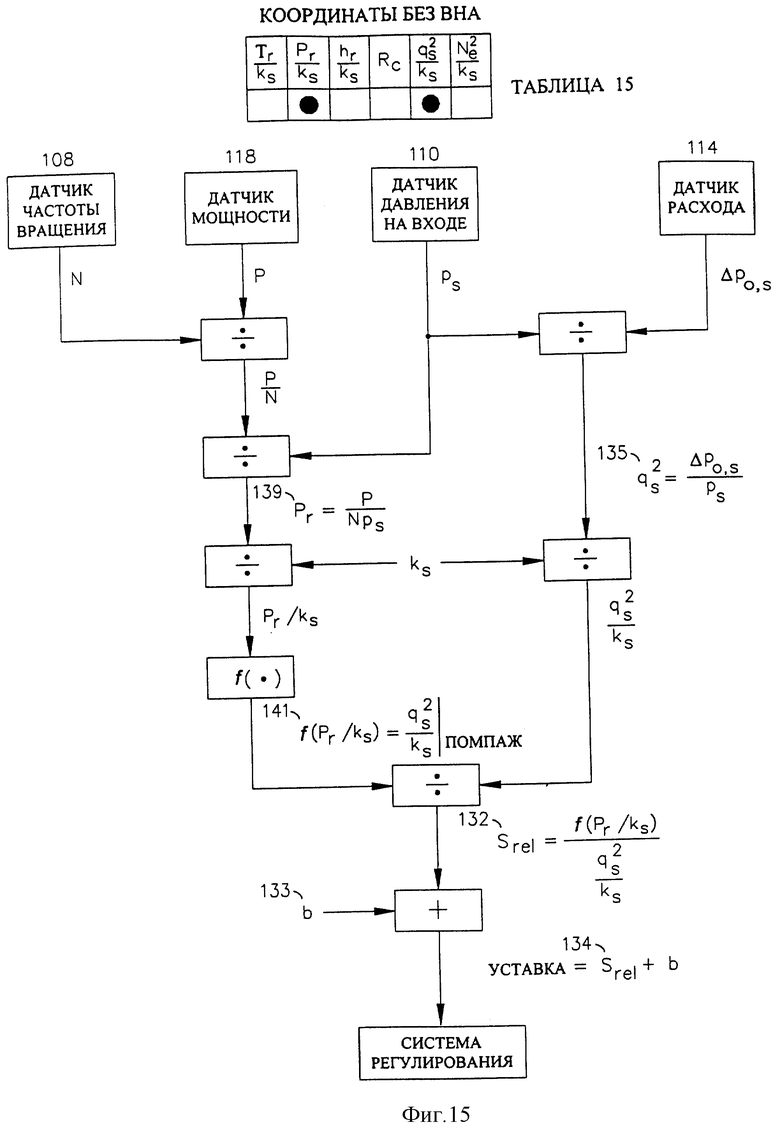
Фиг. 15 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Pr/ks, qs2/ks).
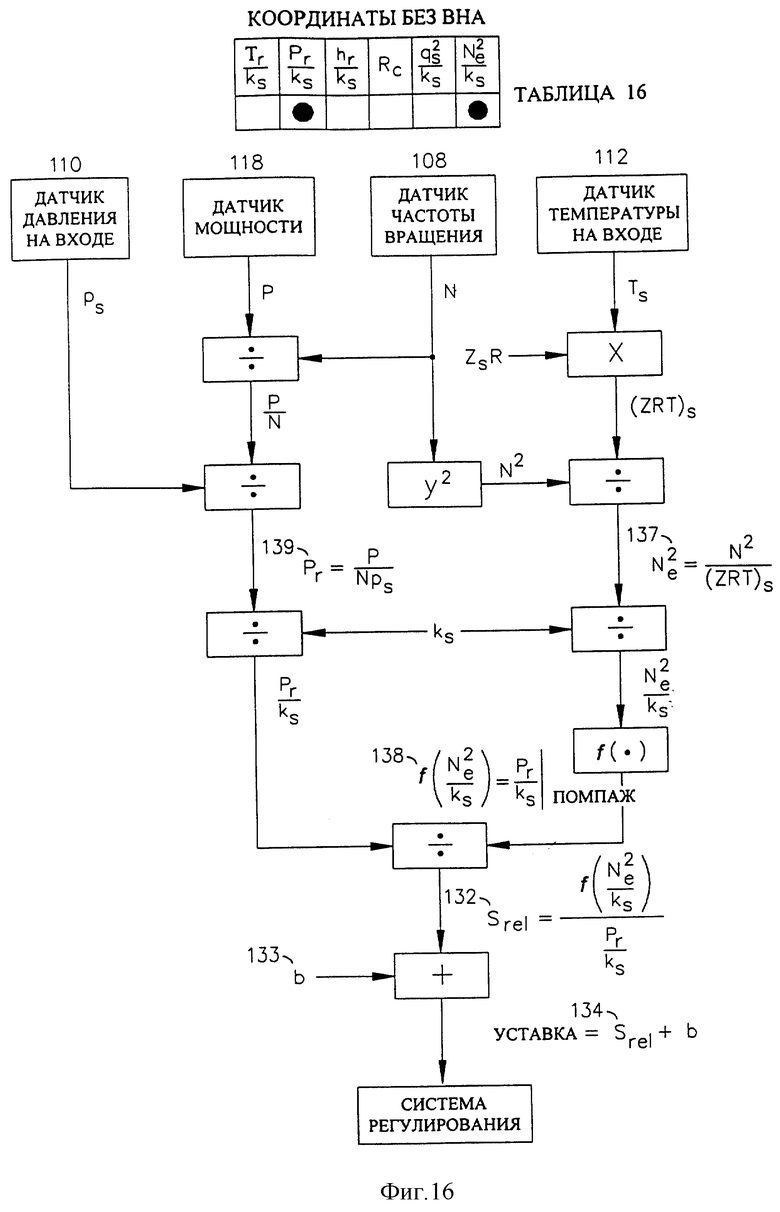
Фиг. 16 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Pr/ks, Ne2/ks).
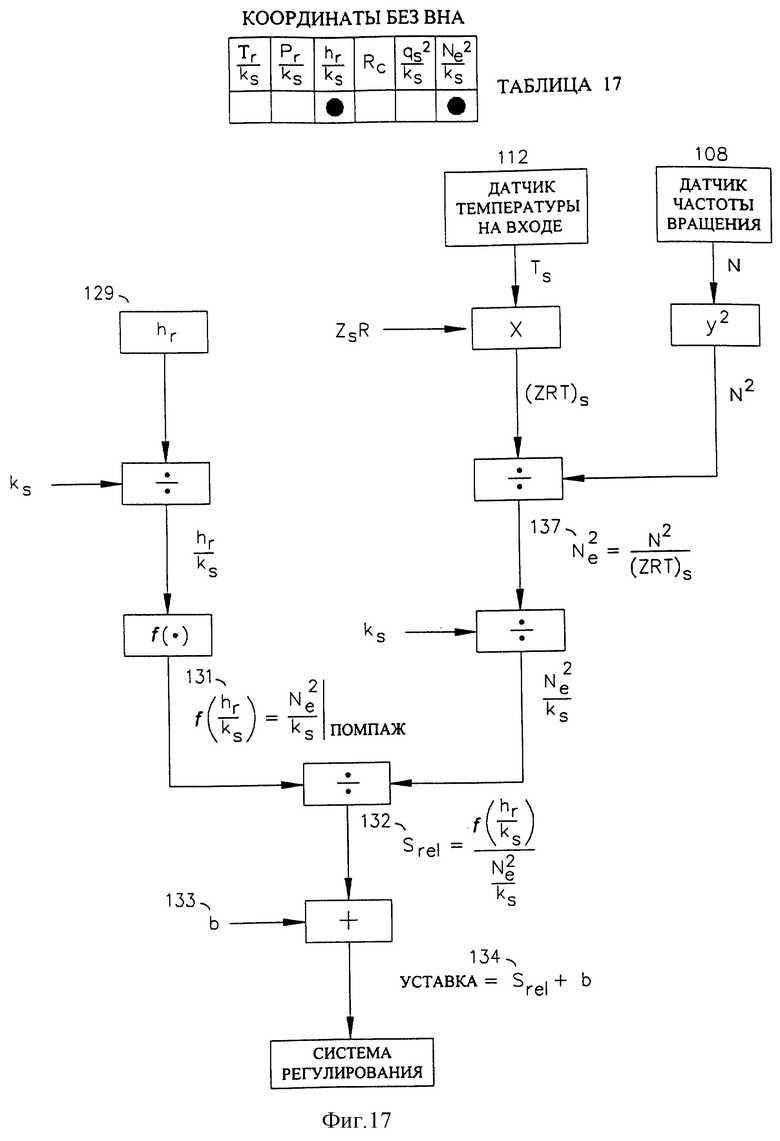
Фиг. 17 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (hr/ks, Ne2/ks).
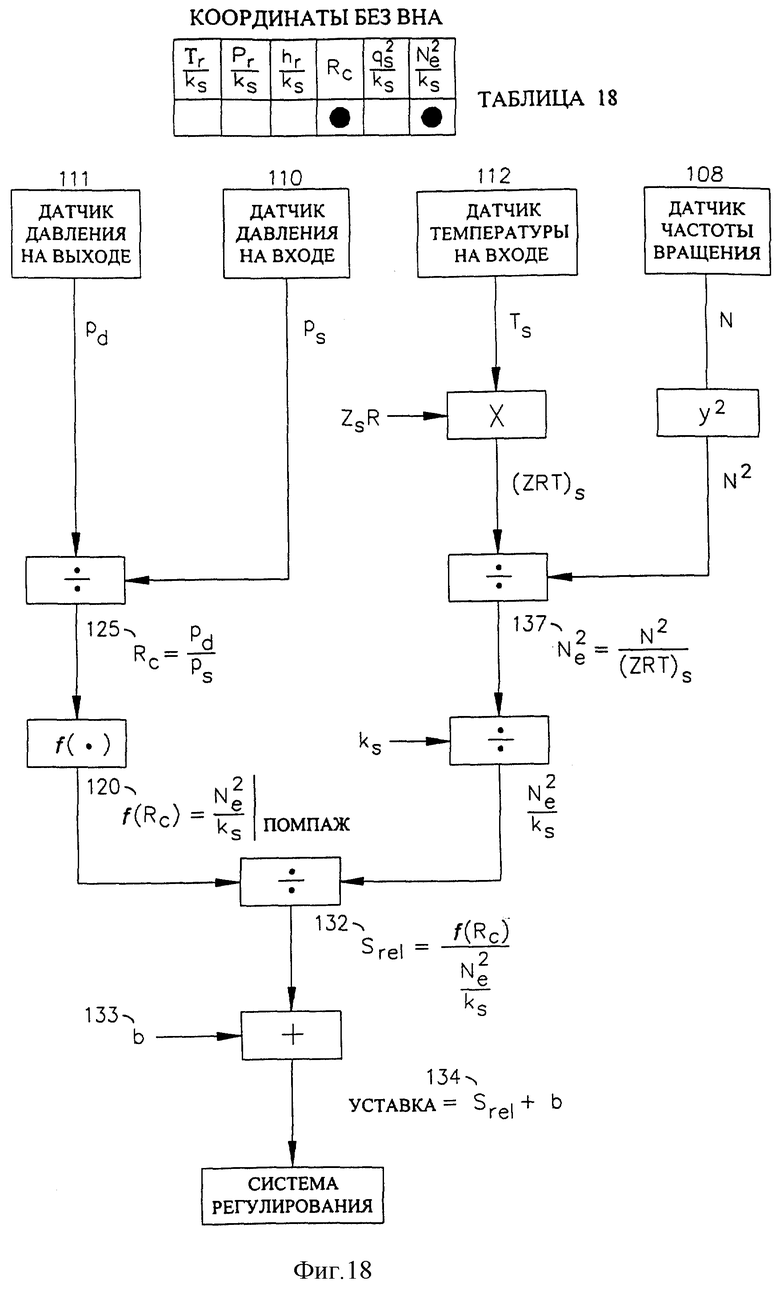
Фиг. 18 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (Rc, Ne2/ks).
Фиг. 19 изображает схему расчетного модуля для турбокомпрессоров без BHA с применением базовых координат (qs2/ks, Ne2/ks).
Фиг. 20 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, Ne2/ks).
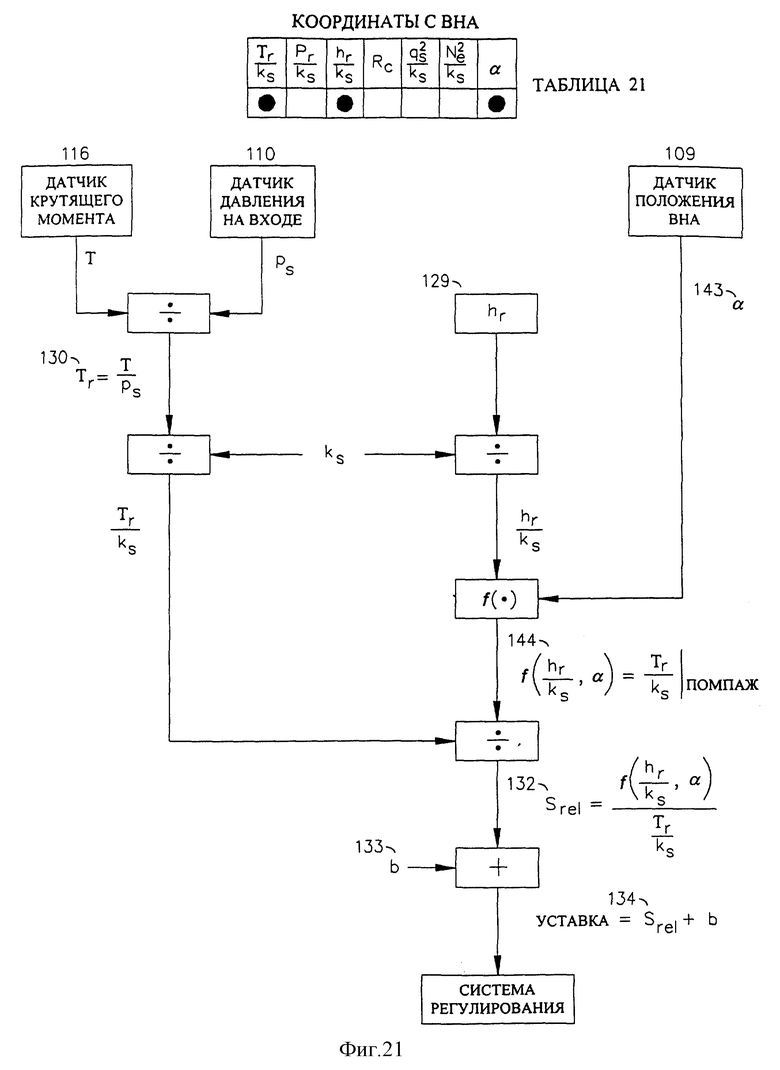
Фиг. 21 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α ).
Фиг. 22 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, Rc, Ne2/ks).
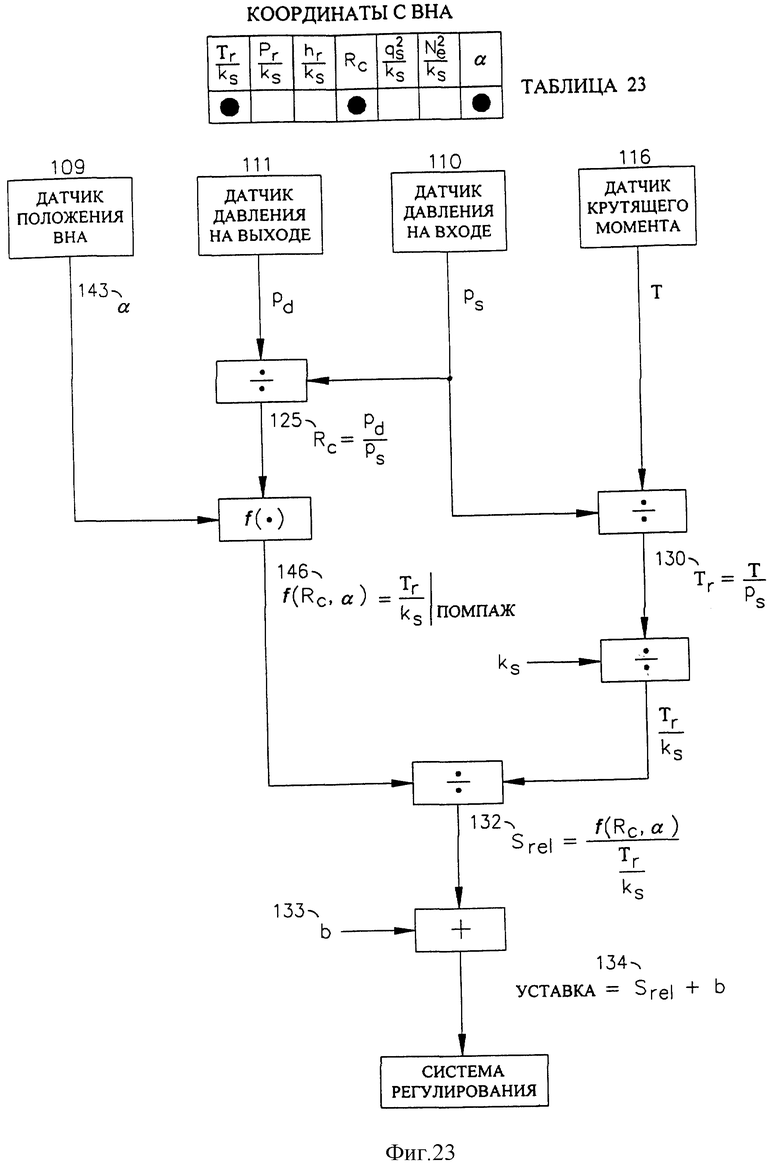
Фиг. 23 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, Rc, α).
Фиг. 24 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, qs2/ks, Ne2/ks).
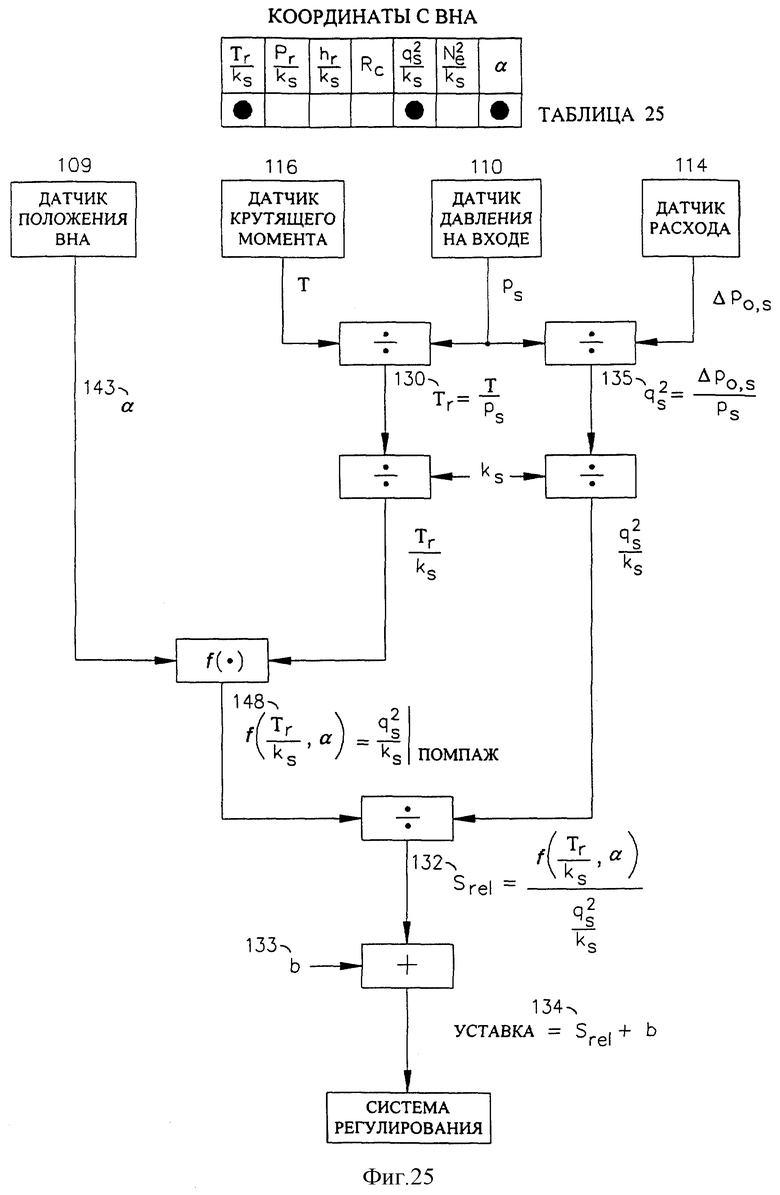
Фиг. 25 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, qs2/ks, α).
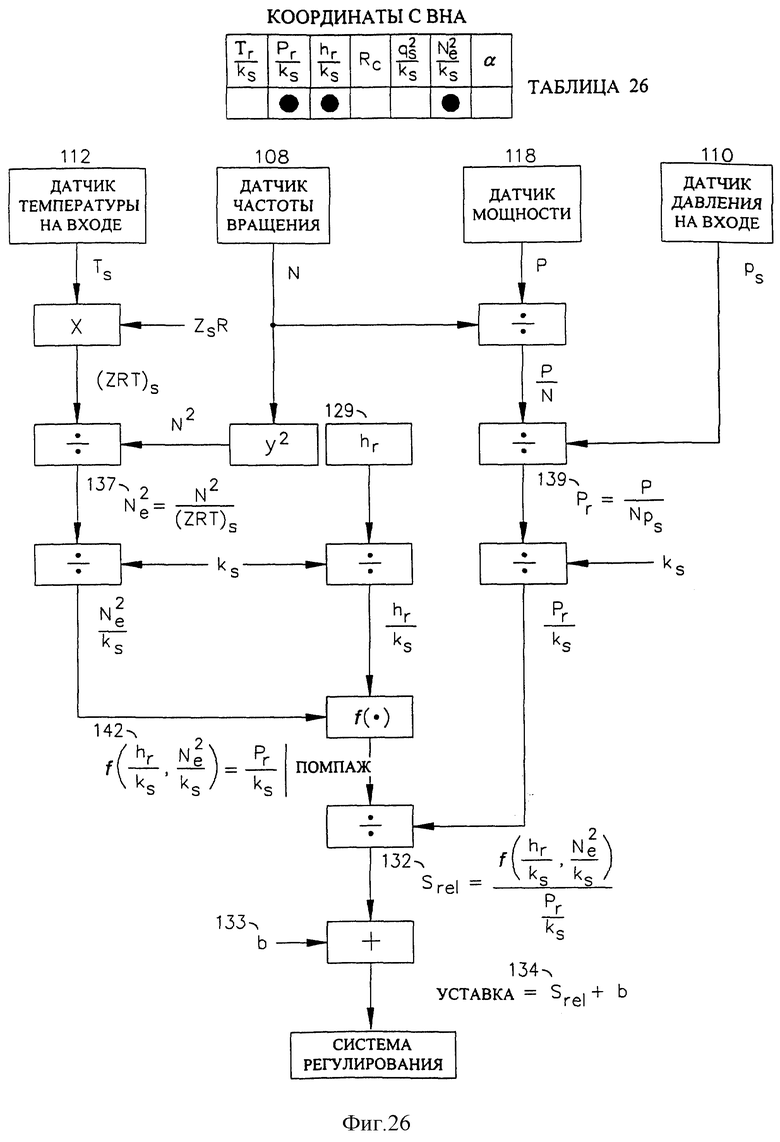
Фиг. 26 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, Ne2/ks).
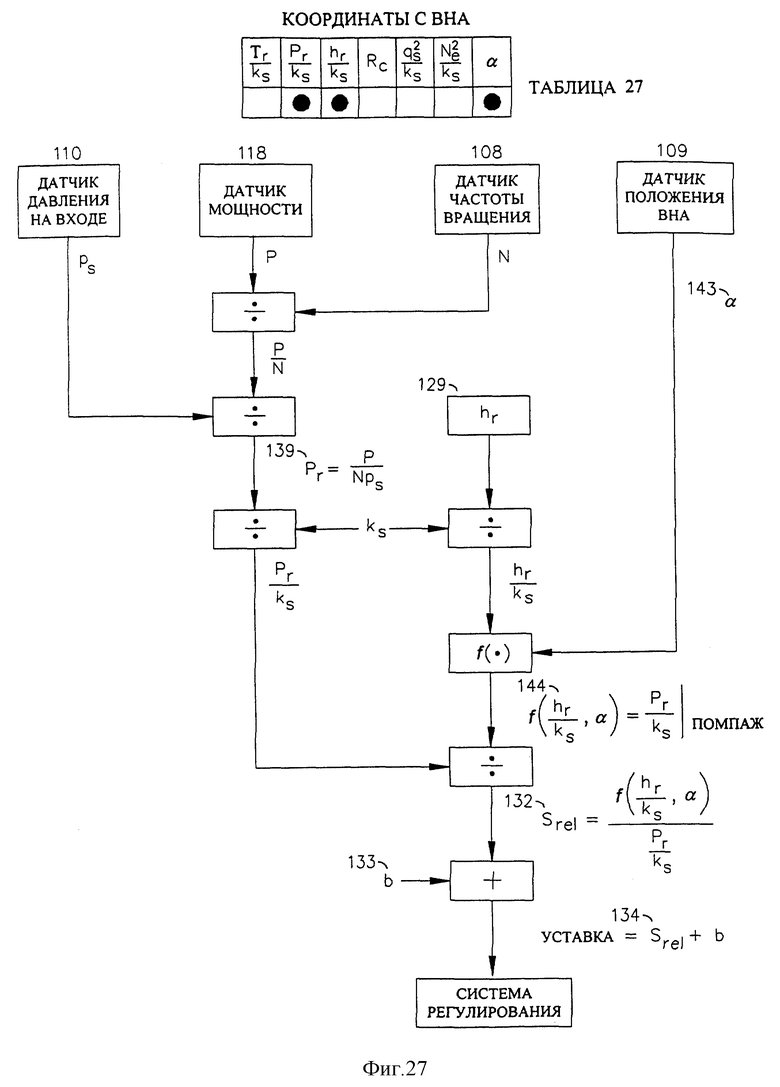
Фиг. 27 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α).
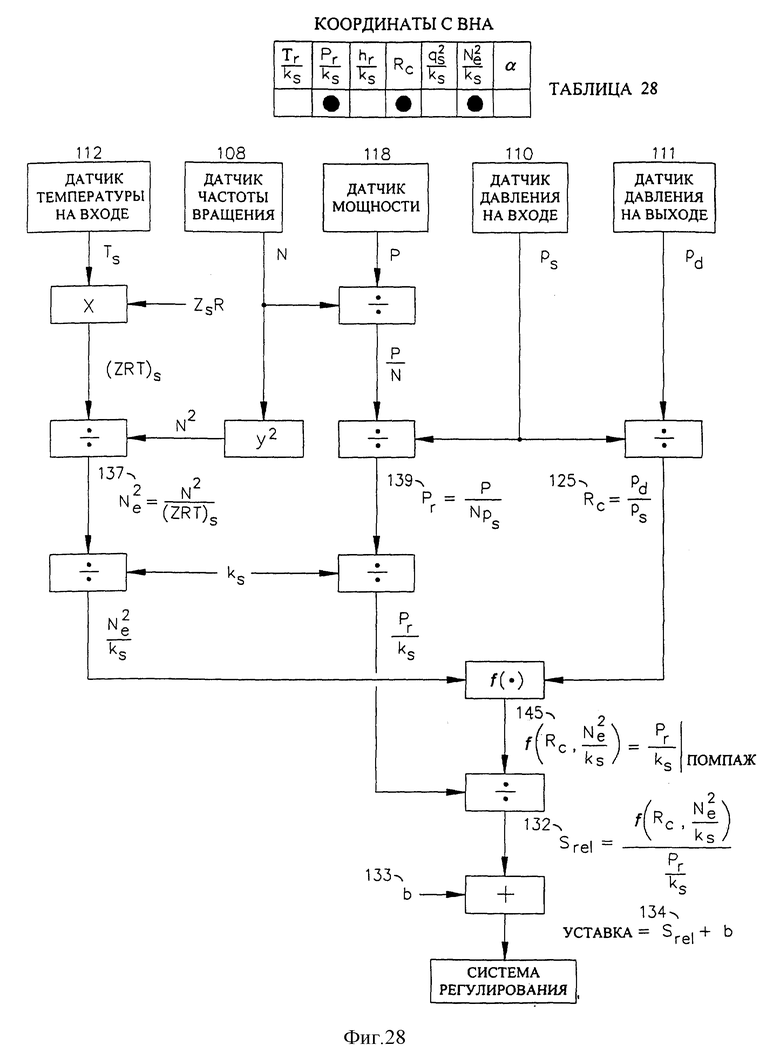
Фиг. 28 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, Rc, Ne2/ks).
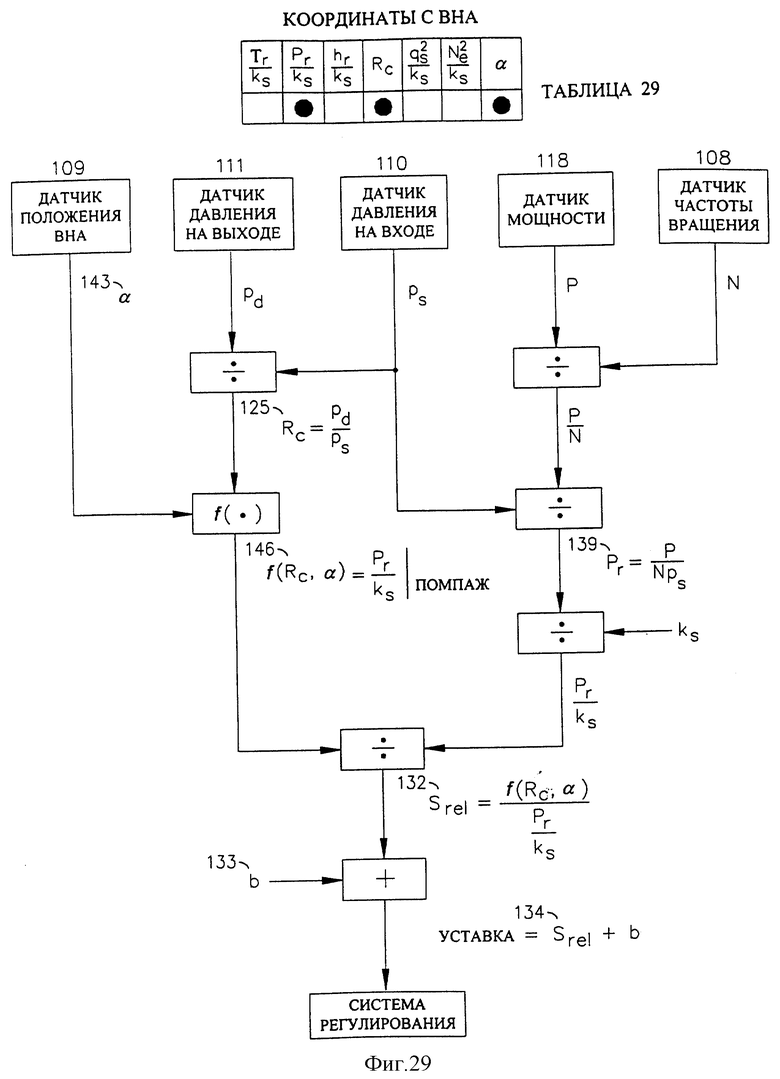
Фиг. 29 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, Rc, α).
Фиг. 30 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, qs2/ks, Ne2/ks).
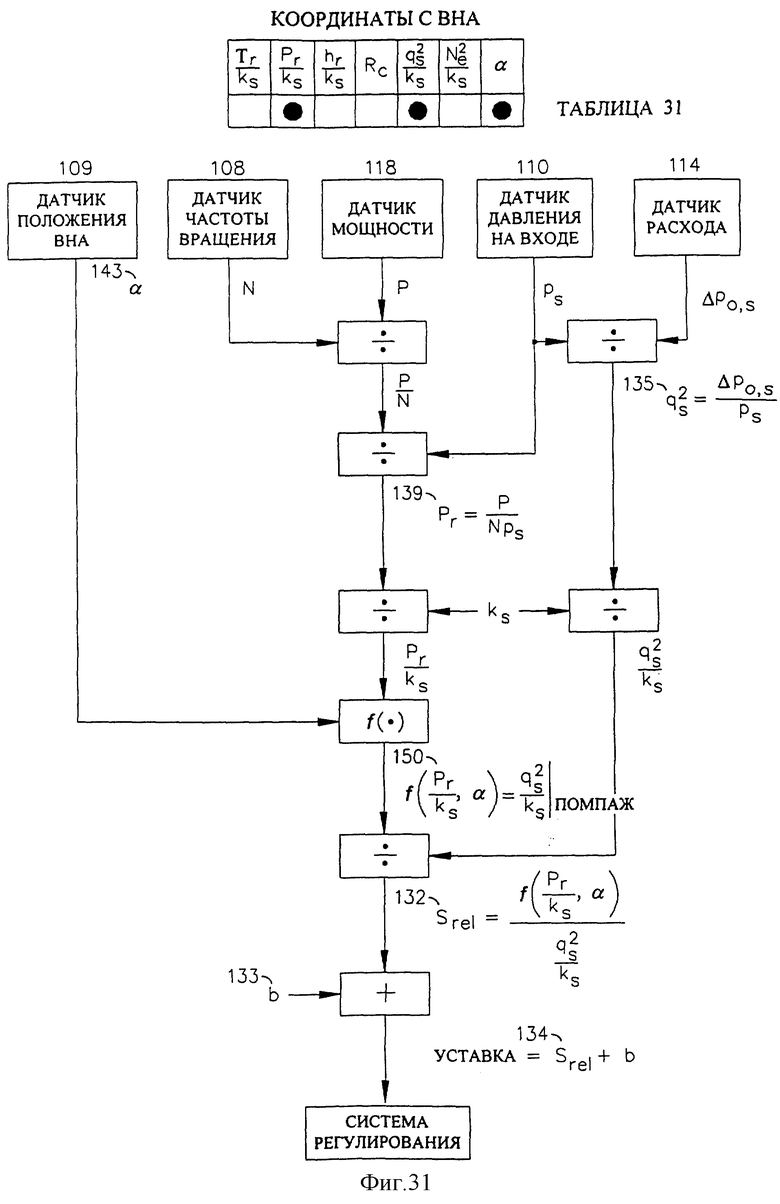
Фиг. 31 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, qs2/ks, α ).
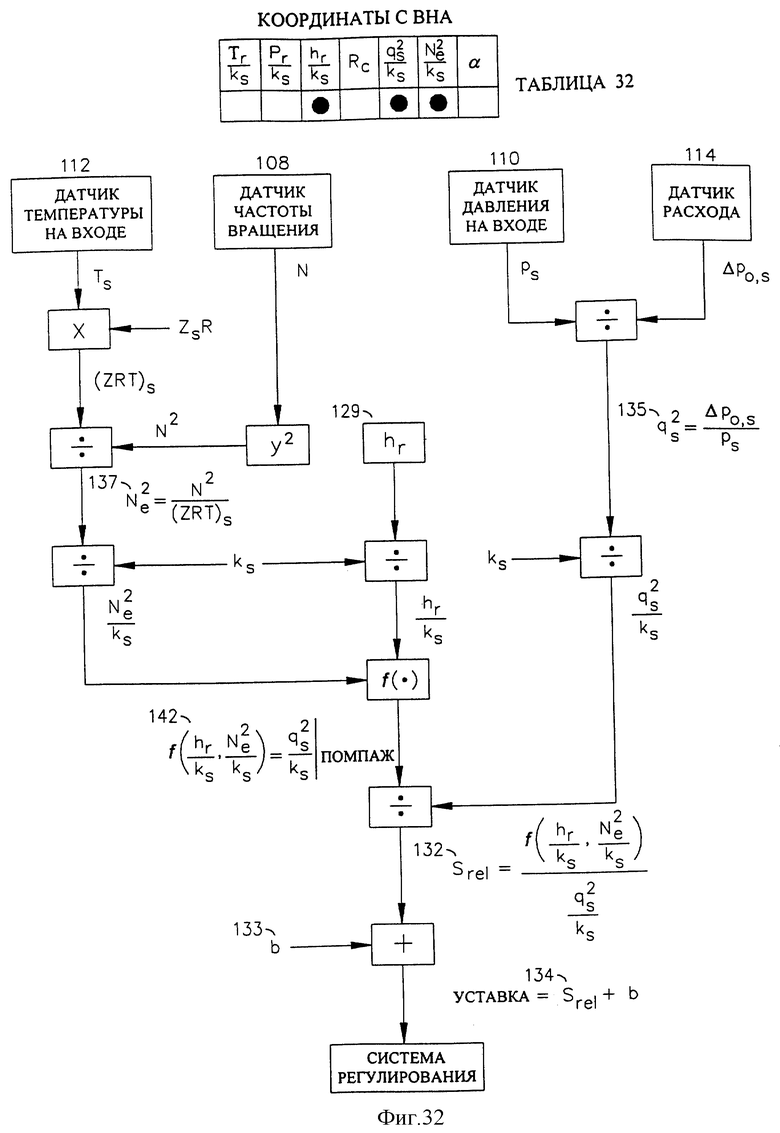
Фиг. 32 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks).
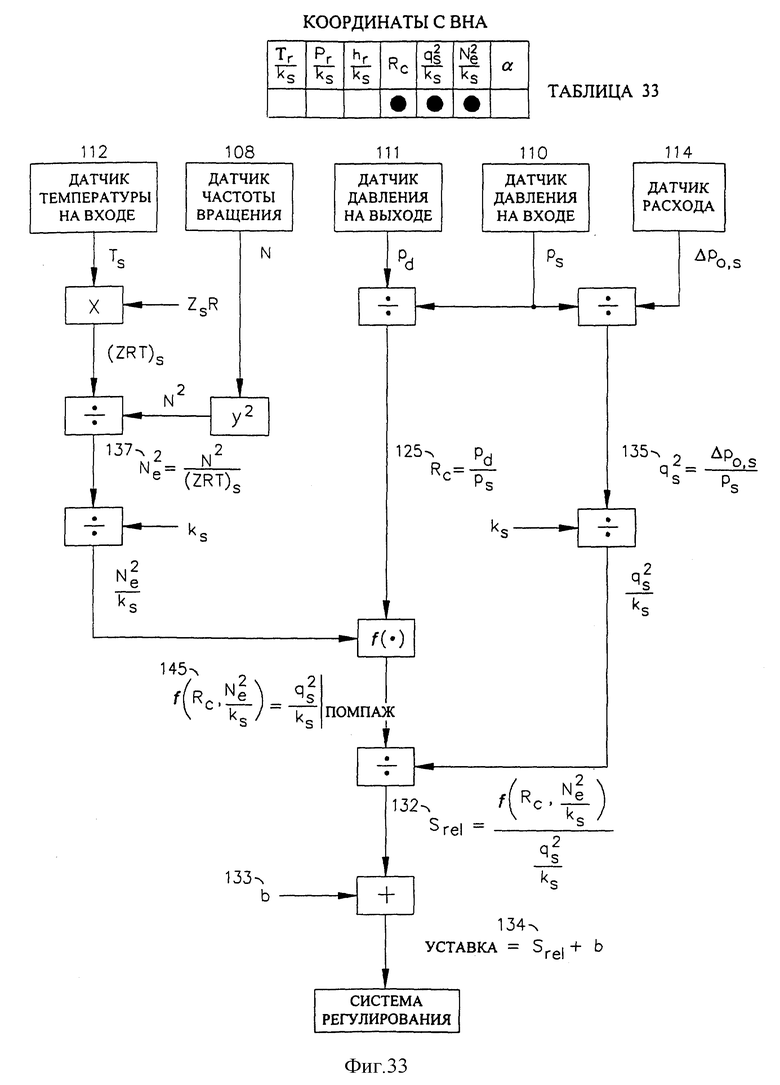
Фиг. 33 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Rc, qs2/ks, Ne2/ks).
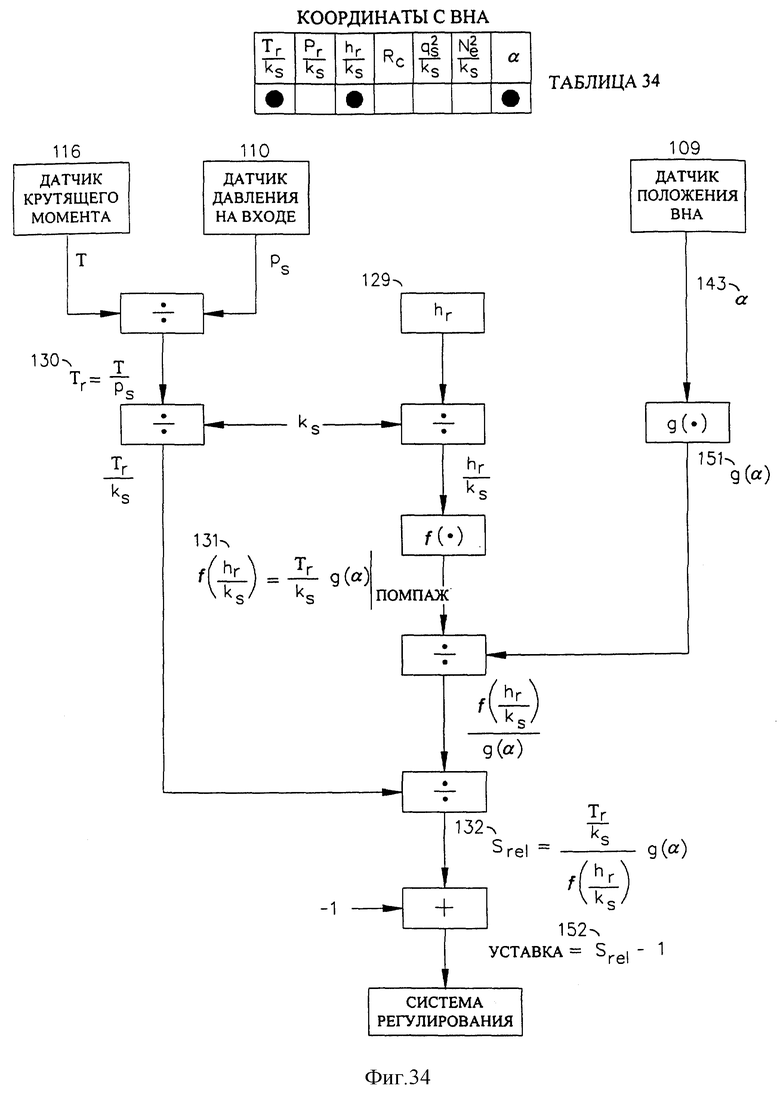
Фиг. 34 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α ).
Фиг. 35 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α ).
Фиг. 36 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α ).
Фиг. 37 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks).
Фиг. 38 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α ).
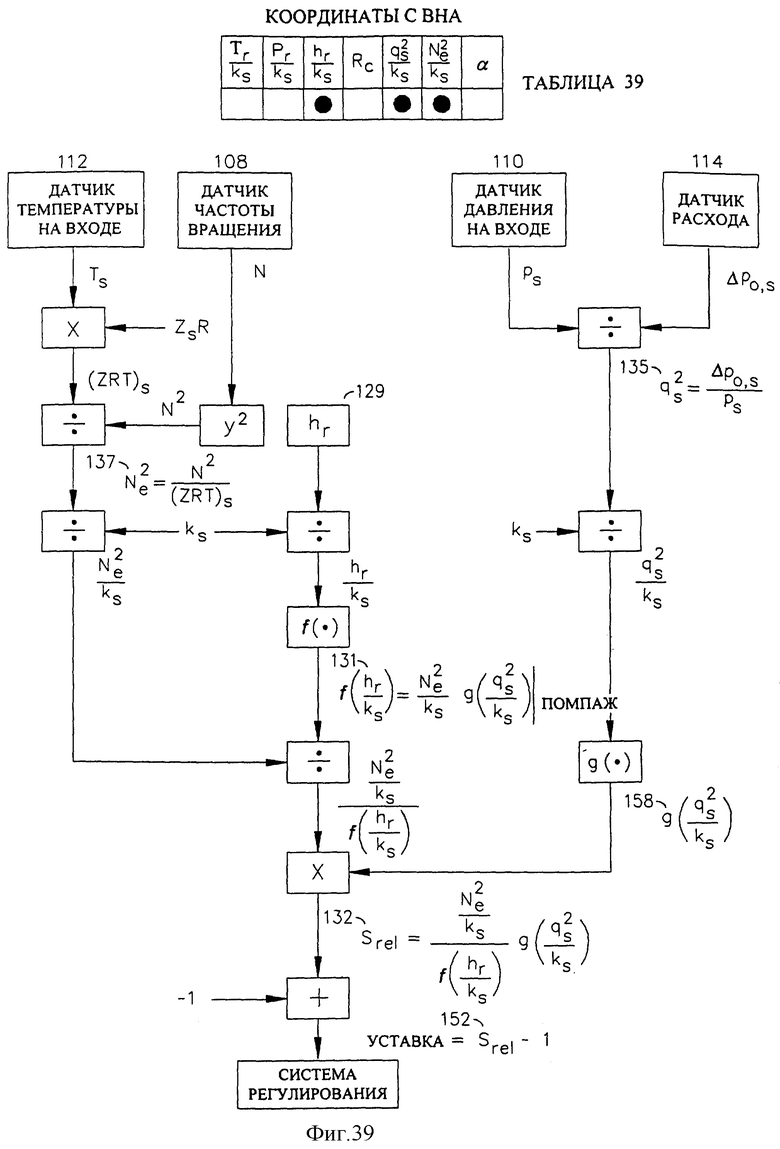
Фиг. 39 изображает схему расчетного модуля для турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks).
Наилучшие режимы для реализации способа
Для защиты компрессора от нестабильных или колебательных процессов (помпажа или срыва потока) необходимо определить момент возникновения этих явлений. Зона стабильной работы компрессора и зона возмущении разделены границей помпажа: Очень важно точно рассчитать положение рабочей точки и расстояние от нее до границы помпажа.
Условия работы, при помощи которых расcчитывается расстояние до зоны помпажа или срыва потока, определяются при помощи датчиков, подключенных к разным частям системы, в которую включен компрессор.
На фиг. 1 изображена система противопомпажного регулирования (с датчиками), при которой турбокомпрессор 101 качает газ от источника 102 к потребителю 106. Газ поступает в компрессор через линию всасывания 103, проходит через установленную в ней измерительную диафрагму 104 и выпускается через линию нагнетания 105. Газ возвращается к источнику 102 через антипомпажный клапан 107.
На фиг. 1 также показаны система противопомпажного регулирования и схема ее подключения к процессу, в который включен компрессор. В данную схему входит датчик частоты вращения 108, датчик положения входного направляющего аппарата 109, датчик давления на всасывании 110, датчик давления на нагнетании 111, датчик температуры на всасывании 112, датчик температуры на нагнетании 113, датчик величины расхода 114 (определяющий разность давлений на измерительной диафрагме 104), датчик положения противопомпажного клапана 115, датчик вращательного момента 116, приводной механизм 117 и датчик мощности 118.
Датчики на фиг.1 взаимодействуют с расчетными модулями, представленными на фиг. 2 и 3, изображающими схемы турбокомпрессоров соответственно с управляемым входным направляющим аппаратом и без него. В обоих случаях коэффициент ks принят постоянным.
На фиг. 2 представлена схема подключения устройств системы регулирования для турбокомпрессоров без управляемого входного направляющего аппарата в координатах (Pr, Rc). В указанной схеме используются следующие приборы: модуль 119 вычисляет отношение давлений как отношение давления в нагнетании к давлению на всасывании, модуль 120 определяет приведенную мощность на границе помпажа (как функцию отношения давлений). Модуль 121 рассчитывает отношение мощности и частоты вращения (об./мин); затем модуль 122, поделив полученное отношение на давление на всасывании, рассчитывает приведенную мощность. И, наконец, относительный наклон определяется при помощи модуля 123 делением приведенной мощности (при помпаже) на текущую приведенную мощность. На основании полученной информации об относительном наклоне контроллер регулирует величину расхода турбокомпрессора.
На фиг. 3 изображена схема подключения расчетного модуля для турбокомпрессоров с управляемым входным направляющим аппаратом в координатах (Pr, Rc, α). В указанной схеме используются следующие устройства: модуль 119 рассчитывает отношение давлений как отношение давления на нагнетании к давлению на всасывании, в то время как модуль 124 определяет приведенную мощность на границе помпажа (как отношение давлений и положения входного направляющего аппарата). Модуль 121 рассчитывает отношение мощности и частоты вращения (об. /мин); затем модуль 122, поделив полученное отношение на давление на всасывании, рассчитывает приведенную мощность. И, наконец, относительный наклон определяется при помощи модуля 123 делением приведенной мощности (при помпаже) на текущую приведенную мощность. Таким образом, модуль 123 делит величину текущей приведенной мощности (Pr) на величину приведенной мощности при помпаже (Pr,surge) с целью определения относительного наклона кривой (Srel). Величины Pr,surge и f(Rc) одинаковы:
их величины являются отношением приведенной мощности во время помпажа к текущей приведенной мощности. Относительный наклон кривой в этом случае используется регулятором для регулирования значения расхода турбокомпрессора.
На фиг. 4А изображена граница помпажа для турбокомпрессора без управляемого входного направляющего аппарата в базовых координатах (см. табл. 1, приведенную на фиг. 2). Аналогично, фиг. 4В содержит изображение границы помпажа для турбокомпрессора с входным направляющим аппаратом в базовых координатах (см. табл. 2, приведенную на фиг. 3).
На фиг. 5 показана карта газодинамических характеристик турбокомпрессора с характеристическими кривыми, границей помпажа и "контрольной линией помпажа", определяющими основные зоны работы.
Базовые системы координат (см. фиг.6) инвариантны к условиям на всасывании и основаны на теории подобия и анализа размерностей. За исключением случаев с положением входного направляющего аппарата предметом настоящего изобретения являются компрессоры с фиксированной (постоянной) геометрией.
Табл. 1 и 2 на фиг. 6 содержат наборы базовых координат для регулирования компрессоров с управляемым входным направляющим аппаратом и без него. Наборы составлены из следующих координат:
Tr - приведенный вращающий момент;
hr - приведенный политропический напор;
qs - приведенное значение расхода на всасывании;
Pr - приведенная мощность;
Ne - приведенная частота вращения;
Rc - отношение давлений;
α - положение входного направляющего аппарата;
ks - отношение удельных теплоемкостей,
где: ;
; ;
; ;
; ;
; ;
; ;
; ,
,
где Т - вращательный момент;
σ - показатель степени;
n - показатель политропы;
Pd - абсолютное давление на нагнетании;
Ps - абсолютное давление на всасывании;
Δ Pos - сигнал измерения расхода на всасывании;
P - мощность;
р - давление;
N - частота вращения;
Z - сжимаемость;
R - газовая постоянная: Ru/MW
Ru - универсальная газовая постоянная;
MW - молекулярный вес;
Т - температура;
s - индекс, всасывание;
r - индекс, приведенный (ая);
cp - удельная теплоемкость при постоянном давлении;
cv - удельная теплоемкость при постоянном объеме.
Хотя настоящее изобретение описано подробно с ссылкой на несколько способов регулирования, линейные и нелинейные комбинации указанных базовых координат также являются инвариантными и могут быть использованы в целях регулирования.
На основе перечисленных выше инвариантных координат может быть построено неограниченное число координатных систем. Большинство указанных координат использовано при регулировании. Данные комбинации входят в спектр настоящего изобретения.
В качестве примера рассмотрим компрессор без входного направляющего аппарата. Построим карту газодинамических характеристик в координатной системе, составленной из нелинейных комбинаций значений приведенного политропического напора, приведенной мощности и приведенного расхода. В частности, карта может быть построена в плоскости:
Указанную комбинацию можно считать удачной, так как она идентична комбинации:
составленной из параметров, полностью независимых от исходных условий, включая отношение удельных теплоемкостей. Преимущества первого набора состоит в его независимости от величины ks. Датчик расхода, как правило, расположен на всасывании. Вполне допустимо также расположение датчика расхода на нагнетании.
На фиг. 7А показана линия границы помпажа с соответствующей линией уставки для турбокомпрессора без управляемого входного направляющего аппарата (BHA) в базовых координатах (Pr, Rc) из табл. 1 на фиг. 2. Аналогично на фиг. 7В показаны несколько линий границы помпажа с соответствующими линиями уставки для турбокомпрессора с BHA в базовых координатах (Pr, Rc, α ) из табл. 2 на фиг. З.
Ниже описаны другие предлагаемые варианты регулирования турбокомпрессора, основанные на применении других комбинаций базовых координат, представленных в табл. 3 и 4.
На фиг. 8 отдельно показана схема расчетного модуля для вычисления приведенного напора hr, выполняемого с использованием сигналов от датчика 112 температуры Ts на всасывании, датчика 113 температуры Td на нагнетании, датчика 111 давления pd на нагнетании и датчика 110 давления ps на всасывании. С использованием этих четырех сигналов в модулях 124 и 125 вычисляют соответственно отношение Rt температур и отношение Rc давлений. Затем от обоих отношений берут логарифм и в модуле 126 производят алгебраические операции для получения показателя σ степени, с которым в модуле 127 отношение Rc давлений возводят в степень σ(R
На фиг.9 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Tr/ks, hr/ks) из табл. 9, в котором используются сигналы от датчика 110 давления ps на всасывании и датчика 116 крутящего момента Т. Модуль 130 вычисляет приведенный крутящий момент Tr, а модуль 129 - приведенный напор hr. Затем величины Tr и hr делят на ks. Функцию f(hr/ks), вычисляемую в модуле 131, используют для характеристики линии границы помпажа, а отношение f(hr/ks) к Tr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 10 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Tr/ks, Rc) из табл. 10, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 111 давления pd на нагнетании и датчика 116 крутящего момента Т. Модуль 130 вычисляет приведенный крутящий момент Tr, а модуль 125 - отношение Rc давлений. Затем величину Tr делят на ks. Функцию f(Rc), вычисляемую в модуле 120, используют для характеристики линии границы помпажа, а отношение f(Rc) к Tr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 11 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Tr/ks, qs2/ks) из табл. 11, в котором используют сигналы от датчика 110 давления ps на всасывании, датчика 114 расхода, который измеряют разность Δp0,s давлений на измерительной диафрагме, и датчика 116 крутящего момента T. Модуль 130 вычисляет приведенный крутящий момент Tr, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Tr и qs2 делят на ks. Функцию f(Tr/ks), вычисляемую в модуле 136, используют для характеристики линии границы помпажа, а отношение f(Tr/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 12 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Tr/ks, Ne2/ks) из табл. 12, в котором используют сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента T, датчика 112 температуры Ts на всасывании и датчика 108 частоты N вращения. Модуль 130 вычисляет приведенный крутящий момент Tr, а модуль 137 - параметр Ne2, эквивалентный частоте вращения. Затем величины Tr и Ne2 делят на ks. Функцию f(Ne2/ks), вычисляемую в модуле 138, используют для характеристики линии границы помпажа, а отношение f(Ne2/ks) к Tr/ks, вычисляемое в модуле 132, для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 13 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Rr/ks, hr/ks) из табл. 13, в котором используют сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности P и датчика 108 частоты N вращения. Модуль 139 вычисляет приведенную мощность Pr, а модуль 129 - приведенный напор hr. Затем величины Pr и hr делят на ks. Функцию f(hr/ks), вычисляемую в модуле 140, используют для характеристики линии границы помпажа, а отношение f(hr/ks) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 14 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Pr/ks, Rc) из табл. 14, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 111 давления pd на нагнетании, датчика 118 мощности Р и датчика 108 частоты N вращения. Модуль 139 вычисляет приведенную мощность Pr, а модуль 125 - отношение Rc давлений. Затем величину Pr делят на ks. Функцию f(Rc), вычисляемую в модуле 120, используют для характеристики линии границы помпажа, а отношение f(Rc) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 15 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Pr/ks, qs2/ks) из табл. 15, в котором используются сигналы от датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 110 давления ps на всасывании и датчика 114 расхода, который измеряет разность Δp0,s давлений на измерительной диафрагме. Модуль 139 вычисляет приведенную мощность Pr, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Pr и qs2 делят на ks. Функцию f(Pr/ks), вычисляемую в модуле 141, используют для характеристики линии границы помпажа, а отношение f(Pr/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 16 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Pr/ks, Ne2/ks) из табл. 16, в котором используются сигналы от датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 110 давления ps на всасывании и датчика 112 температуры Ts на всасывании. Модуль 139 вычисляет приведенную мощность Pr, а модуль 137 - параметр Ne2, эквивалентный частоте вращения. Затем величины Pr и Ne2 делят на ks. Функцию f(Ne2/ks), вычисляемую в модуле 138, используют для характеристики линии границы помпажа, а отношение f(Ne2/ks) к Pr/ks), вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 17 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (hr/ks, Ne2/ks) из табл. 17, в котором используются сигналы от датчика 108 частоты N вращения и датчика 112 температуры Ts на всасывании. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, а модуль 129 - приведенный напор hr. Затем величины Ne2 и hr делят на ks. Функцию f(hr/ks), вычисляемую в модуле 131, используют для характеристики линии границы помпажа, а отношение f(hr/ks) к Ne2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 18 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (Rc, Ne2/ks) из табл. 18, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 111 давления pd на нагнетании, датчика 108 частоты N вращения и датчика 112 температуры Ts на всасывании. Модуль 137 вычисляет параметр Ne2 эквивалентный частоте вращения, а модуль 125 - отношение Rc давлений. Затем величину Ne2 делят на ks. Функцию f(Rc), вычисляемую в модуле 120, используют для характеристики линии границы помпажа, а отношение f(Rc) к Ne2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 19 показано вычислительное модульное устройство для регулирования турбокомпрессоров без BHA с применением базовых координат (qs2/ks, Ne2/ks) из табл. 19, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δp0,s давлений на измерительной диафрагме. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Ne2 и qs2 делят на ks. Функцию f(Ne2/ks), вычисляемую в модуле 138, используют для характеристики линии границы помпажа, а отношение f(Ne2/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.20 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, Ne2/ks) из табл. 20, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 116 крутящего момента Т. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 137 - параметр Ne2, эквивалентный частоте вращения, а модуль 129 - приведенный напор hr. Затем величины Tr, Ne2 и hr делят на ks. Значения hr/ks и Ne2/ks используют в качестве аргументов в функции f(hr/ks, Ne2/ks), вычисляемой в модуле 142 и используемой для характеристики линии границы помпажа, а отношение f(hr/ks, Ne2/ks) к Tr /ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.21 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α ) из табл. 21, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т и датчика 109 положения BHA. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Tr и hr делят на ks. Значения hr/ks и α используют в качестве аргументов в функции f(hr/ks, α ), вычисляемой в модуле 144 и используемой для характеристики линии границы помпажа, а отношение f(hr/ks, α ) к Tr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.22 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, Rc, Ne2/ks) из табл. 22, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т, датчика 111 давления pd на нагнетании, датчика 108 частоты N вращения и датчика 112 температуры Ts на всасывании. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 125 - отношение Rc давлений, а модуль 137 - параметр Ne2, эквивалентный частоте вращения. Затем величины Tr и Ne2 делят на ks. Значения Rc и Ne2/ks используют в качестве аргументов в функции f(Rc, Ne2/ks), вычисляемой в модуле 145 и используемой для характеристики линии границы помпажа, а отношение f(Rc, Ne2/ks) к Tr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.23 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, Rc, α ) из табл. 23, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т, датчика 111 давления pd на нагнетании и датчика 109 положения BHA. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 125 - отношение Rc давлений, а модуль 143 - положение α BHA. Затем величину Tr делят на ks. Значения Rc и α используют в качестве аргументов в функции f(Rc, α ), вычисляемой в модуле 146 и используемой для характеристики линии границы помпажа, а отношение f(Rc, α ) к Tr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.24 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, qs2/ks, Ne2/ks) из табл. 24, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δ p0,s давлений на измерительной диафрагме. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 137 - параметр Ne2, эквивалентный частоте вращения, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Tr, Ne2 и qs2 делят на ks. Значения Tr/ks и Ne2/ks используют в качестве аргументов в функции f(Tr/ks, Ne2/ks), вычисляемой в модуле 147 и используемой для характеристики линии границы помпажа, а отношение f(Tr/ks, Ne2/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 25 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, qs2/ks, α) из табл. 25, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т, датчика 109 положения BHA и датчика 114 расхода, который измеряет разность Δ po,s давлений на измерительной диафрагме. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 143 - положение α BHA, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Tr и qs2 делят на ks. Значения Tr/ks и α используют в качестве аргументов в функции f(Tr/ks, α), вычисляемой в модуле 148 и используемой для характеристики линии границы помпажа, а отношение f(Tr/ks, α ) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 26 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, Ne2/ks) из табл. 26, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 112 температуры Ts на всасывании, датчика 108 частоты N вращения и датчика 118 мощности. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, модуль 139 - приведенную мощность Pr, а модуль 129 - приведенный напор hr. Затем величины Pr, Ne2 и hr делят на ks. Значения hr/ks и Ne2/ks используют в качестве аргументов в функции f(hr/ks, Ne2/ks), вычисляемой в модуле 142 и используемой для характеристики линии границы помпажа, а отношение f(hr/ks, Ne2/ks) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 27 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α) из табл. 27, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения и датчика 109 положения BHA. Модуль 139 вычисляет приведенную мощность Pr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Pr и hr делят на ks. Значения hr/ks и α используют в качестве аргументов в функции f(hr/ks, α ), вычисляемой в модуле 144 и используемой для характеристики линии границы помпажа, а отношение f(hr/ks, α ) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 28 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, Rc, Ne2/ks) из табл. 28, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 111 давления pd на нагнетании и датчика 112
температуры Ts на всасывании. Модуль 139 вычисляет приведенную мощность Pr, модуль 137 - параметр Ne2, эквивалентный частоте вращения, а модуль 125 - отношение Rc давлений. Затем величины Pr и Ne2 делят на ks. Значения Rc и Ne2/ks используют в качестве аргументов в функции f(Rc, Ne2/ks), вычисляемой в модуле 145 и используемой для характеристики линии границы помпажа, а отношение f(Rc, Ne2/ks) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 29 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, Rc, α) из табл. 29, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 111 давления pd на нагнетании и датчика 109 положения BHA. Модуль 139 вычисляет приведенную мощность Pr, модуль 125 - отношение Rc давлений, а модуль 143 - положение α BHA. Затем величину Pr делят на ks. Значения Rc и α используют в качестве аргументов в функции f(Rc, α ), вычисляемой в модуле 146 и используемой для характеристики линии границы помпажа, а отношение f(Rc, α ) к Pr/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 30 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, qs2/ks, Ne2/ks) из табл. 30, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δ p0,s давлений на измерительной диафрагме. Модуль 139 вычисляет приведенную мощность Pr, модуль 137 - параметр Ne2, эквивалентный частоте вращения, а модуль 135 - приведенный расход qs2 на всасывании. Затем величины Ne2/Pr и qs2 делят на ks. Значения Pr/ks и Ne2/ks используют в качестве аргументов в функции f(Pr/ks, Ne2/ks), вычисляемой в модуле 149 и используемой для характеристики линии границы помпажа, а отношение f(Pr/ks, Ne2/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.31 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, qs2/ks, α) из табл. 31, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения, датчика 109 положения BHA и датчика 114 расхода, который измеряет разность Δ p0,s давлений на измерительной диафрагме. Модуль 139 вычисляет приведенную мощность Pr, модуль 135 - приведенный расход qs2 на всасывании, а модуль 143 - положение α BHA. Затем величины Pr и qs2 делят на ks. Значения Pr/ks и α используют в качестве аргументов в функции f(Pr/ks, α ), вычисляемой в модуле 150 и используемой для характеристики линии границы помпажа, а отношение f(Pr/ks, α ) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 32 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks) из таблицы 32, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δ p0,s давлений на измерительной диафрагме. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, модуль 135 - приведенный расход qs2 на всасывании, а модуль 129 - приведенный напор hr. Затем величины Ne2, hr и qs2 делят на ks. Значения hr/ks и Ne2/ks используют в качестве аргументов в функции f(hr/ks, Ne2/ks), вычисляемой в модуле 142 и используемой для характеристики линии границы помпажа, а отношение f(hr/ks, Ne2/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 33 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Rc, qs2/ks, Ne2/ks) из табл. 33, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании, датчика 114 расхода, который измеряет разность Δp0,s давлений на измерительной диафрагме, и датчика 111 давления pd на нагнетании. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, модуль 135 - приведенный расход qs2 на всасывании, а модуль 125 - отношение Rc давлений. Затем величины Ne2 и qs2 делят на ks. Значения Rc и Ne2/ks используют в качестве аргументов в функции f(Rc, Ne2/ks), вычисляемой в модуле 145 и используемой для характеристики линии границы помпажа, а отношение f(Rc, Ne2/ks) к qs2/ks, вычисляемое в модуле 132, - для определения относительного наклона Srel, который корректируют по ширине зоны b безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 34 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α) из табл. 34, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т и датчика 109 положения BHA. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Tr и hr делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа. Затем функцию f(hr/ks) делят на функцию g(α) положения BHA, вычисляемую в модуле 151, для вычисления отношения f(hr/ks)/g(α). Отношение Tr/ks к f(hr/ks)/g(α), вычисляемое в модуле 132, используют для определения относительного наклона Srel, который в модуле 152 уменьшают на единицу для вычисления уставки (Srel-1), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 35 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Tr/ks, hr/ks, α) из табл. 35, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 116 крутящего момента Т и датчика 109 положения BHA. Модуль 130 вычисляет приведенный крутящий момент Tr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Tr и hr делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа. Аналогично значения Tr/ks и α используют в качестве аргументов в соответствующих функциях g(Tr/ks) и h(α), вычисляемых соответственно в модулях 153 и 154. Отношение g(Tr/ks) к f(hr/ks) в модуле 132 умножают на h(α) для определения относительного наклона Srel, который корректируют по изменяемой ширине зоны b(•) безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 36 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α) из табл. 36, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения и датчика 109 положения BHA. Модуль 139 вычисляет приведенную мощность Pr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Pr и hr делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа. Аналогично значения Pr/ks и α используют в качестве аргументов в соответствующих функциях g(Pr/ks) и h (α), вычисляемых соответственно в модулях 156 и 154. Отношение g(Pr/ks) к f(hr/ks) в модуле 132 умножают на h( ) для определения относительного наклона Srel, который корректируют по изменяемой ширине зоны b(•) безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
) для определения относительного наклона Srel, который корректируют по изменяемой ширине зоны b(•) безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 37 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks) из табл. 37, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δ p0,s давлений на измерительной диафрагме. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, модуль 135 - приведенный расход qs2 на всасывании, а модуль 129 - приведенный напор hr. Затем величины Ne2, hr и qs2 делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа. Аналогично значения Ne2/ks и qs2/ks используют в качестве аргументов в соответствующих функциях h(Ne2 /ks) и g(qs2/ks), вычисляемых соответственно в модулях 157 и 158. Произведение f(hr/ks) и h(Ne2/ks) в модуле 132 делят на g(qs2/ks) для определения относительного наклона Srel, который корректируют по изменяемой ширине зоны b(•) безопасности для вычисления в модуле 134 уставки (Srel+b), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг. 38 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (Pr/ks, hr/ks, α ) из табл. 38, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 118 мощности Р, датчика 108 частоты N вращения и датчика 109 положения BHA. Модуль 139 вычисляет приведенную мощность Pr, модуль 143 - положение α BHA, а модуль 129 - приведенный напор hr. Затем величины Pr и hr делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа. Затем функцию f(hr/ks) делят на функцию g(α) положения BHA, вычисляемую в модуле 151, для вычисления отношения f(hr/ks)/g( α ). Отношение Pr/ks к f(hr/ks)/g(α), вычисляемое в модуле 132,
используют для определения относительного наклона Srel, который в модуле 152 уменьшают на единицу для вычисления уставки (Srel-1), используемой системой регулирования для регулирования расхода в турбокомпрессоре.
На фиг.39 показано вычислительное модульное устройство для регулирования турбокомпрессоров с BHA с применением базовых координат (hr/ks, qs2/ks, Ne2/ks) из табл. 39, в котором используются сигналы от датчика 110 давления ps на всасывании, датчика 108 частоты N вращения, датчика 112 температуры Ts на всасывании и датчика 114 расхода, который измеряет разность Δ\p0,s давлений на измерительной диафрагме. Модуль 137 вычисляет параметр Ne2, эквивалентный частоте вращения, модуль 135 - приведенный расход qs2 на всасывании, а модуль 129 - приведенный напор hr. Затем величины Ne2, hr и qs2 делят на ks. Значение hr/ks используют в качестве аргумента в функции f(hr/ks), вычисляемой в модуле 131 и используемой для характеристики линии границы помпажа, а отношение Ne2/ks к f(hr/ks) в модуле 132 умножают на функцию g(qs2/ks), вычисляемую в модуле 158, для определения относительного наклона Srel, который в модуле 152 уменьшают на единицу для вычисления уставки (Srel-1), используемой системой регулирования для регулирования расхода в турбокомпрессоре.












Изобретение предназначено для измерения расстояния от рабочей точки турбокомпрессора до границы помпажа турбокомпрессора. Указанную границу определяют как функцию приведенной мощности Рrks, и величину, характеризующую рабочую точку турбокомпрессора вычисляют как функцию приведенной мощности Рrks. Средства вычисления уставки содержат средства вычисления уставки относительно границы помпажа турбокомпрессора как функции приведенной мощности Рrks, а средства вычисления величины, характеризующей рабочую точку турбокомпрессора, содержат средства вычисления этой величины как функции приведенной мощности Рrks. Приводятся варианты данного способа и устройства. Такие способы и устройства позволяют обеспечить защиту турбокомпрессоров от разрушительных процессов, таких как помпаж и срыв потока на основе применения различных систем координат, инвариантных к условиям на всасывании, с использованием небольшого количества датчиков. 6 с. и 24 з.п. ф-лы, 39 ил.
| Способ подготовки поверхности стекла | 1974 |
|
SU500195A1 |
| Способ защиты компрессора от помпажа и устройство для его осуществления | 1989 |
|
SU1825899A1 |
| Способ определения границы устойчивой работы компрессора при стендовых испытаниях | 1975 |
|
SU574658A1 |
| Система противопомпажного управления компрессорной установкой | 1991 |
|
SU1776886A1 |
| DE 4202226 A1, 08.04.1993 | |||
| DE 3544822 A1, 19.06.1987. | |||

