Предлагаемое техническое решение относится к системам регулирования электрических величин и может быть использовано в радио- и электротехнике для усиления и ослабления индукционного переменного электрического тока.
В радиотехнике прием сигнала осуществляется с помощью антенны, в которой модулированный высокочастотный сигнал индуцирует ток. Ток антенны весьма мал по амплитуде и для извлечения из него информации требуется его усиление. Для усиления принимаемого антенной радиосигнала используются различные усилители (на электронных лампах, транзисторах, микросхемах), в которых осуществляется преобразование тока с использованием внешнего источника электроэнергии (Б.М. Яворский, А.А. Детлаф. "Справочник по физике для инженеров и студентов вузов". - М.: "Наука", 1977, с. 492-497).
Недостаток способа заключается в том, что процесс на выходе усилителя за счет влияния шумов антенно-фидерного тракта имеет меньшее отношение сигнал/шум, чем процесс на выходе антенны. Это вызвано тем, что проводник, в котором индуцирован ток, и усилитель разнесены пространственно. Для уменьшения влияния антенно-фидерного тракта усилитель приближают к источнику усиливаемого тока настолько, насколько это возможно конструктивно. Тем не менее полностью исключить потери практически невозможно.
Наиболее близким способом управления индукционным электрическим током к заявляемому является способ, применяемый в трансформаторе с сердечником, при котором величина тока, индуцируемого во вторичной обмотке трансформатора, регулируется путем изменения воздушного зазора магнитопровода (B.C. Попов, А.С. Николаев. "Электротехника", 1966, с. 291-292). Вторичная обмотка трансформатора расположена в переменном магнитном поле, формируемом первичной обмоткой при пропускании через нее переменного электрического тока. Изменение свойств магнитопровода трансформатора приводит к изменению напряженности магнитного поля, пронизывающего вторичную обмотку, а следовательно, и к изменению амплитуды продольной составляющей скорости движения электронов в ее витках, т.е. к изменению индукционного тока в ее цепи.
Недостаток способа заключается в том, что управление током, а именно воздействие на продольную составляющую движения электронов, производится за счет изменения напряженности магнитного поля, пронизывающего витки вторичной обмотки. Это приводит к тому, что в случае, когда напряженность магнитного поля ограничена (постоянна мощность источника питания), ток во вторичной обмотке при неизменной частоте можно регулировать только в сторону уменьшения относительно тока при полностью замкнутом магнитопроводе. Для усиления тока требуется дополнительный усилитель.
Таким образом, решаемой задачей является управление электрическим током, включающее его усиление и ослабление, непосредственно в проводнике, в котором он индуцирован магнитным полем.
Поставленная задача решается тем, что в известном способе управления электрическим током в проводнике, находящемся в магнитном поле, заключающемся в воздействии на продольную составляющую скорости движения электронов в этом проводнике, согласно изобретению движению электронов в проводнике с током сообщают дополнительную поперечную составляющую относительно направлений магнитной индукции поля и тока.
Поставленная задача решается также тем, что:
- поперечную составляющую движению электронов в проводнике с током сообщают путем возвратно-поступательного перемещения проводника;
- для усиления тока, текущего в проводнике, частоту изменения направления движения проводника и начальную фазу его движения выбирают равными частоте и начальной фазе потока магнитного поля;
- для ослабления тока, текущего в проводнике, частоту изменения направления движения проводника выбирают, равной частоте потока магнитного поля, а начальную фазу его движения - отличающейся на половину периода относительно начальной фазы потока магнитного поля;
- поперечную составляющую движению электронов в проводнике с током сообщают с помощью переменного электрического поля;
- для усиления тока, текущего в проводнике, частоту и начальную фазу электрического поля выбирают равными частоте и начальной фазе потока магнитного поля;
- для ослабления тока, текущего в проводнике, частоту электрического поля выбирают, равной частоте потока магнитного поля, а начальную фазу - отличающейся на половину периода относительно начальной фазы потока магнитного поля.
Поясним сущность предлагаемого решения.
В соответствии с законом электромагнитной индукции в проводнике, находящемся в переменном магнитном поле, возникает электродвижущая сила индукции, которая является причиной возникновения в цепи индукционного электрического тока. Электрический ток в проводнике представляет собой направленное движение заряженных частиц - электронов. Движение электронов происходит под действием на них электрического поля, которое, в соответствии с теорией Максвелла, формируется в пространстве при наличии в нем изменяющегося во времени магнитного поля (И.В. Савельев. "Курс общей физики, том II. Электричество". - М. : "Наука", 1970, с. 373 и 193). В проводнике индуцируется максимальный ток, когда вектор магнитной индукции и проводник с индуцированным в нем током взаимно перпендикулярны.
В условиях предлагаемого технического решения параметры электромагнитного поля известны.
Управление переменным электрическим током в проводнике заключается в изменении продольной скорости перемещения электронов в нем. Для тока J, индуцированного магнитным полем, воздействие на продольное перемещение электронов может быть осуществлено (как реализовано, в частности, в ближайшем аналоге - в трансформаторе с изменяемыми параметрами магнитопровода) путем изменения напряженности магнитного поля H, пронизывающего проводник. При этом изменяется сила f=fН, действующая на электрон в проводнике и направленная вдоль проводника (фиг. 1, здесь показаны лишь направления векторов, соответствующие изображенному направлению вектора напряженности магнитного поля H, для противоположного направления вектора H направления всех векторов на фиг. 1 должны быть также изменены на противоположные).
Величина индукционного тока в проводнике пропорциональна скорости изменения во времени потока магнитной индукции Ф
J≈-dФ/dt. (1)
Здесь и далее знаком "≈" обозначена линейная зависимость, пропорциональность. Знак "-" в формуле (1) означает, что направление тока J и направление dФ связаны правилом левого винта.
Однако изменить продольную скорость перемещения электронов в проводнике возможно и другим путем: сообщив движению электронов поперечную составляющую относительно вектора напряженности поля H и тока J. Для линейного проводника такая поперечная составляющая в принципе может быть получена путем механического воздействия на проводник и сообщения ему возвратно-поступательного перемещения в указанном направлении (вектор поперечной силы ν на фиг. 1). При этом частота изменения направления движения проводника в магнитном поле должна совпадать с частотой изменения напряженности магнитного поля (и, соответственно, индукционного тока). Тогда электроны вследствие силы Лоренца fL, действующей перпендикулярно направлению напряженности магнитного поля (вектору H) и перемещению проводника (вектору ν), приобретают дополнительную продольную составляющую (вдоль вектора fH. аким образом, в зависимости от начальной фазы движения проводника в магнитном поле движение электронов вдоль проводника будет ускоряться (f=fН+fL) или тормозиться (f=fН-fL), т.е. в данном случае сила Лоренца создает дополнительный ток, который усиливает или ослабляет ток в проводнике.
Пусть поток магнитной индукции Ф изменяется в соответствии с функцией fпол(t), зависящей от времени t. Если проводник, находящийся в переменном магнитном поле, движется сам, то поток магнитной индукции в нем является сложной функцией времени
Ф=fпол(t)+fпров(t), (2)
где fпров(t) - функция, описывающая движение проводника в магнитном поле.
Из последней формулы следует, что в зависимости от характера движения проводника в переменном магнитном поле суммарная скорость изменения потока магнитной индукции dФ/dt может как увеличиваться, так и уменьшаться.
В случае, когда функция изменения поля fпол(t) и функция движения проводника fпров(t) связаны соотношением
fпол(t)=-fпров(t)+C, (3)
где C - постоянная величина,
суммарная скорость изменения магнитного потока dФ/dt = 0 и, следовательно, ток в проводнике отсутствует. Для гармонических функций fпол(t) и fпров(t) с одинаковыми периодами условие (3) означает их противофазность (отличие начальной фазы на половину периода) и возможное смещение амплитуд колебаний на величину C для любого момента времени t.
Если же функция изменения поля fпол(t) и функция движения проводника fпров(t) в магнитном поле удовлетворяют условию
d(fпол(t)+fпров(t))/dt=Ky•d(fпол(t))/dt, (4)
что эквивалентно
fпров(t)=(Ky-l)•fпол(t)+C, (5)
где Ky - величина, имеющая смысл коэффициента усиления, равная действующему отношению амплитуд колебаний напряженностей поля при подвижном и при неподвижном проводнике,
то происходит усиление амплитуды тока в проводнике в Ky раз. Для гармонических функций fпров(t) и fпол(t) с одинаковыми периодами последнее условие означает их синфазность (совпадение начальных фаз), отличие амплитуд в (Ky-l) раз и возможное их смещение на величину C для любого момента времени t.
В частности, если проводник расположен в магнитном потоке Ф, изменяющемся в соответствии с функцией fпол(t) = sin(ωt), тo в проводнике индуцируется ток J ≈ cos(ωt). Таким образом, для получения в проводнике усиленного сигнала той же частоты необходимо перемещать проводник в поле по закону
fпров(t) = (Kу-1)×sin(ωt). (6)
В этом случае в проводнике будет получен ток J ≈ Kу×cos(ωt).
Механическое перемещение проводника в магнитном поле не позволяет управлять током высокой частоты, так как перемещение проводника даже с частотой порядка единиц кГц технически проблематично. Кроме того, техническую реализацию движения проводника, имеющего форму витков катушки, в направлении от продольной ее оси и обратно (по закону (6)) также осуществить видимо затруднительно. Для перемещения электронов в проводнике возможно использование электрического поля. Переменное электрическое поле напряженности E (фиг. 1) создается вдоль вектора ν, т.е. перпендикулярно направлению вектора напряженности магнитного поля H и направлению тока J. Здесь используется известное свойство: движение электронов в незаряженном проводнике возникает при внесении его в электрическое поле, в заряженном - при изменении направления этого поля (И.В. Савельев. "Курс общей физики, том II. Электричество". - М.: "Наука", 1970, с. 84-86).
Дальнейший механизм управления током в проводнике аналогичен рассмотренному при механическом перемещении проводника в магнитном поле. Т.е. вследствие силы Лоренца fL, действующей перпендикулярно направлению магнитного поля (вектору H) и направлению поперечного перемещения электронов в проводнике (вектору ν), электроны приобретают дополнительную продольную (вдоль вектора fH) составляющую.
В случае воздействия на проводник, находящийся в магнитном поле, электрическим полем (в поперечном относительно магнитного поля направлении) появление дополнительной составляющей движения электронов, перпендикулярной обоим полям, известно как эффект Холла (И.В. Савельев "Курс общей физики, том II. Электричество". - М.: "Наука", 1970, с. 261-265).
В зависимости от соотношения фаз магнитного и электрических полей движение электронов вдоль проводника будет ускоряться или тормозиться, а ток - усиливаться или ослабляться.
Амплитуда поперечного (вдоль вектора ν) движения электронов в проводнике за счет электрического поля, а следовательно, и коэффициент усиления Ky, зависят от максимальной напряженности поля EМ и от ширины проводника dпр вдоль направления этого поля
Ky ≈ EМ•dпр. (7)
Мгновенная напряженность поля E для плоских параллельных проводящих пластин, формирующих поле, определяется соотношением
E≈U/d, (8)
где U - мгновенная разность потенциалов между проводящими пластинами, формирующими электрическое поле;
d - расстояние между проводящими пластинами (d>dпр).
Изобретение иллюстрируется чертежами.
На фиг. 1 изображены вектор силы ν, сообщающей поперечную составляющую движению электрона e, вектор результирующей силы f, перемещающей электрон в продольном направлении, а также вектора напряженностей магнитного H и электрического E полей и ток J. Здесь показаны направления векторов, соответствующие изображенному направлению вектора напряженности магнитного поля H, для противоположного направления вектора H. Hаправления всех векторов на фиг. 1 должны быть также изменены на противоположные
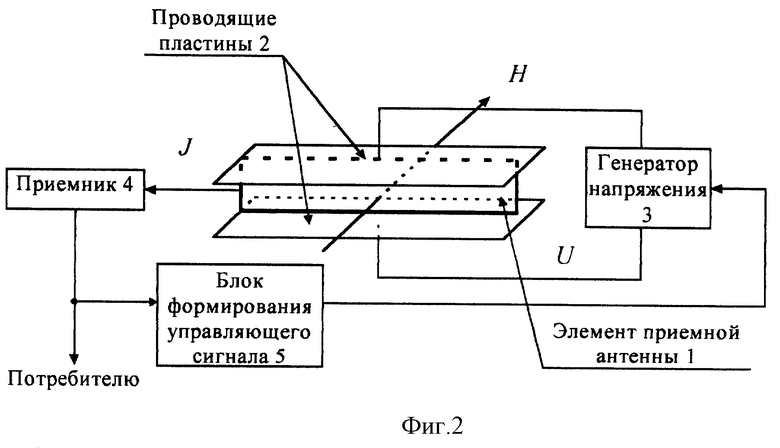
На фиг. 2 изображен пример устройства, реализующего предлагаемый способ для приема и усиления радиосигналов.
Устройство, реализующее предлагаемый способ для приема и усиления радиосигналов известной частоты, содержит элемент приемной антенны 1, помещенный между двумя проводящими пластинами 2, которые соединены с генератором напряжения 3, и приемник 4, вход которого соединен с элементом приемной антенны 1, а выход - с блоком формирования управляющего сигнала 5 и с потребителем информации, выход блока 5 соединен с управляющим входом генератора напряжения 3.
Устройство работает следующим образом.
Высокочастотный радиосигнал возбуждает в элементе приемной антенны 1, ориентированным перпендикулярно направлению вектора напряженности магнитного поля H, индукционный ток J. Для усиления тока J с выхода генератора напряжения 3 на проводящие пластины 2 подается переменное напряжение U, согласованное по фазе и частоте с радиосигналом. С помощью генератора напряжения 3 между пластинами 2 создается переменное электрическое поле Е. Электроны элемента приемной антенны 1 в магнитном поле при отсутствии электрического (под действием только силы fH на фиг. 1) движутся (возвратно-поступательно) вдоль элемента антенны 1. Под действием переменного электрического поля E они приобретают поперечную составляющую (вектор ν на фиг. 1). Возникающая при этом сила Лоренца (вектор fL, на фиг. 1) сообщает электронам в продольном направлении элемента антенны 1 дополнительное ускорение, согласованное с их продольным движением. Это согласованность достигается тем, что частота изменения напряжения генератора 3 выбрана равной несущей частоте принимаемого сигнала, а близость их начальных фаз обеспечивается блоком формирования управляющего сигнала 5. Усиленный сигнал с выхода элемента антенны 1 поступает на приемник 4, где производится его обработка с целью выделения полезной информации. Так как сигнал, поступающий на вход приемника 4, значительно усилен, то в приемнике осуществляются только выделение его из внешних шумов и помех и выдача потребителю. Начальная фаза напряжения генератора 3 регулируется по величине сигнала с выхода приемника 4. Для этого в блоке формирования управляющего сигнала 5 производится сравнение мощности сигнала, принятого в двух произвольных последних периодах ее оценки (например, визуально, с помощью потенциалоскопа). Последний сигнал отличается от предыдущего тем, что он сформирован при сдвинутом по фазе на некоторую величину Δφ напряжении генератора напряжения 3. Для этого в начале работы производится первое изменение фазы напряжения генератора 3. При этом если сигнал текущего периода превышает сигнал предыдущего (т.е. если изменение фазы привело к увеличению сигнала на выходе приемника), то на выходе блока 5 формируется управляющий сигнал для следующего изменения начальной фазы напряжения генератора 3 в ту же сторону. Изменение начальной фазы генератора напряжения 3 при ее подстройке производится, например, путем задержки сигнала с выхода генератора 3 на время не более Δt = Δφ/ω (сек), где Δφ (рад) - точность регулировки фазы; ω (рад/сек) - круговая частота напряжения генератора 3. Коэффициент усиления сигнала в результате воздействия на элемент антенны 1 электрическим полем определяется в соответствии с формулой (7).
Таким образом, усиление тока, индуцируемого в антенне 1, в значительной степени произведено непосредственно в антенне, поэтому потери и искажения сигнала за счет антенно-фидерного тракта в устройстве существенно снижены (в Ky раз).
Предлагаемое устройство может быть выполнено на следующих функциональных элементах:
элемент приемной антенны 1 - пластина из проводящего материала, длина которой обычно согласована с длиной волны принимаемого сигнала, толщина ее в данном случае не имеет принципиального значения, ширина dпр определяет эффективность усиления устройства и должна быть по возможности большей (ограничения следуют из формул (7) и (8));
проводящие пластины 2 - пластины из проводящего материала, размеры которых не менее длины и толщины элемента приемной антенны;
генератор напряжения 3 - генератор синусоидального напряжения (B.C. Попов, А.С. Николаев. "Электротехника", 1966, с. 391-394);
приемник 4 - в зависимости от назначения устройства конструкция приемника может быть различной (Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с. 343-344);
блок формирования управляющего сигнала 5 - на потенциалоскопе (Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с. 183-187) с визуальным наблюдением сигнала и последующим ручным формированием сигнала для регулирования фазы генератора напряжения 3.
Использование: в системах регулирования электрических величин и может быть использовано в радио- и электротехнике для усиления и ослабления индукционного переменного электрического тока. Технический результат заключается в управлении электрическим током, включающем его усиление и ослабление непосредственно в проводнике, в котором он индуцирован магнитным полем. В способе управления электрическим током в проводнике, находящемся в магнитном поле, воздействуют на продольную составляющую скорости движения электронов в этом проводнике. Кроме того, движению электронов в проводнике с током сообщают дополнительную поперечную составляющую относительно направлений магнитной индукции поля и тока. Поперечную составляющую движению электронов в проводнике с током сообщают путем возвратно-поступательного перемещения проводника либо с помощью переменного электрического поля. 6 з.п.ф-лы, 2 ил.
| САВЕЛЬЕВ И.В | |||
| Курс общей физики, т.II | |||
| Электричество | |||
| - М.: Наука, 1970, с.373, 193 | |||
| Усилитель тока | 1986 |
|
SU1339873A1 |
| Усилитель с отрицательной массой (немаг) | 1960 |
|
SU135149A1 |
| Устройство для регулирования или усиления электрических токов | 1958 |
|
SU136779A1 |
| 0 |
|
SU204028A1 | |
| Электромагнитное дозирующее устройство | 1977 |
|
SU642835A1 |
| Устройство для управления расходом потока токопроводящей жидкости | 1971 |
|
SU433905A1 |
| US 4616188 A, 07.10.1986 | |||
| GB 1104848 A, 28.02.1968. | |||

