Предлагаемое техническое решение относится к области радиолокации и может быть использовано для повышения защищенности радиолокационной станции (РЛС) от наводящихся по излучению РЛС противорадиолокационных ракет (ПРР) и от активных помех (АП).
Эффективным способом выведения РЛС из строя является применение ПРР. Существует группа ПРР, наведение которых на РЛС большую часть времени полета осуществляется по радиоизлучению, при этом оказывается достаточной мощность излучения РЛС, соответствующая области боковых лепестков и фона диаграммы направленности антенны (ДНА). На последнем этапе наведение может производится по тепловому излучению РЛС, с помощью телевизионной или лазерной системы.
Известны способы и устройства, обеспечивающие снижение точности наведения ПРР за счет уменьшения объема информации, поступающей от РЛС на ПРР (Небабин В. Г. и др. "Защита РЛС от противорадиолокационных ракет". - "Зарубежная радиоэлектроника", N 5, 1990, с. 73). Одним из вариантов этого способа является сокращение времени работы РЛС в эфире путем полного или периодического выключения РЛС после обнаружения противорадиолокационной ракеты, что приводит к увеличению ошибки наведения. Длительность паузы в работе РЛС определяется временем пролета ПРР конечного участка траектории, величина которого определяется требуемой величиной промаха. Недостаток этого способа состоит, во-первых, в необходимости обнаружения и распознавания ПРР, что представляет собой сложную задачу из-за малой площади эффективной поверхности рассеяния (ЭПР) ПРР, во-вторых, при поочередном пуске нескольких ПРР величина паузы может потребоваться недопустимо большой. При этом способе защиты противник достигает цели - выведения РЛС из строя если не путем ее уничтожения, то путем вынужденного ее выключения.
Известны также способ и устройство защиты излучающих средств с помощью имитаторов-ловушек. Так, например, для защиты подводных лодок от атак самонаводящегося противолодочного оружия используют имитаторы подводных лодок, которые имитируют их сигналы (В.С. Пирумов, Р.А. Червинский, М., Воениздат, 1987, с. 100 - 101, рис. 5.1). Имитатор принимает сигналы гидролокатора противника, преобразует их и переизлучает, отвлекая на себя огневые средства противника.
Наиболее близкими техническими решениями являются способ защиты РЛС от ПРР и устройства для его реализации по патенту США N 4433333, основанные на имитации излучения РЛС неподвижными постановщиками ложных сигналов (ПЛС), расположенными на определенных расстояниях друг от друга и от защищаемой РЛС. При этом ПРР движется в направлении энергетического центра системы (РЛС - ПЛС), вследствие чего появляется систематическая ошибка его наведения на РЛС. Поочередное включение ПЛС обеспечивает дополнительную составляющую ошибки наведения ПРР. Необходимым условием работы системы является близость ПЛС к защищаемой РЛС, с тем чтобы система наведения ПРР не могла разрешить источники излучения.
Таким образом, известный способ защиты РЛС от ПРР заключается в излучении ложных сигналов с помощью постановщиков ложных сигналов.
Известный способ реализуется устройством, представляющим собой комплекс, состоящий из РЛС и ПЛС, блок-схема которого изображена на фиг. 1.
Известный комплекс защиты РЛС от ПРР содержит последовательно соединенные ЗУ команд управления ПЛС 1, блок кодирования 2, передатчик 3, антенну 4, последовательно соединенные передатчик 5, развязывающее устройство 6 и антенну 7, а также приемник 8, соединенный со вторым выходом развязывающего устройства 6. Блоки 1 - 8 входят в состав радиолокационной станции, причем блоки 1 - 4 предназначены для управления работой ПЛС, а блоки 5 - 8 обеспечивают работу РЛС по обнаружению целей.
Комплекс включает в себя несколько постановщиков ложных сигналов (ПЛС), каждый из которых содержит последовательно соединенные приемную антенну 9, приемник 10, блок декодирования 11, блок управления передатчиком 12, передатчик ложных сигналов 13 и передающую антенну 14.
Комплекс работает следующим образом. Из ЗУ команд управления ПЛС 1 в соответствии с заданной программой последовательности включения передатчиков ПЛС поступают команды управления включением ПЛС, которые кодируются в блоке кодирования 2 индивидуально для каждого ПЛС, в передатчике 3 преобразуются в высокочастотные сигналы и через антенну 4 излучаются в пространство.
Принятый антенной 9 ПЛС высокочастотный кодированный сигнал преобразуется в приемнике 10 на видеочастоту и декодируется в блоке декодирования 11. При декодировании, во-первых, определяется принадлежность принятого сигнала данному ПЛС, во-вторых, выделяется команда управления излучением ПЛС. Команда управления излучением ПЛС поступает в блок управления передатчиком 12, где формируется сигнал включения или выключения передатчика 13, высокочастотный сигнал которого, имитирующий излучение защищаемой РЛС, через антенну 14 излучается в пространство.
Недостатком описанных выше способа, комплекса РЛС - ПЛС является то, что из-за близкого расположения ПЛС к защищаемой РЛС они не защищают РЛС от ПРР, имеющих нерадиолокационную систему наведения на последнем участке траектории (например, в оптическом или инфракрасном диапазоне волн).
Кроме того, недостатком описанной системы защиты является низкая защищенность РЛС от ПРР при достаточно большом количестве пусков ПРР, наводящихся только по радиоизлучению. Это объясняется тем, что ПРР выводится на относительно небольшую площадь, определяемую геометрией размещения элементов комплекса РЛС - ПЛС.
К недостаткам относится и достаточно высокая мощность излучения ПЛС, которая должна быть сравнима с мощностью излучения защищаемой РЛС (в области боковых лепестков или фона ДНА). Это приводит к усложнению и удорожанию аппаратуры ПЛС относительно ПРР, а также облегчает поражение самой системы защиты.
Кроме того, описанная система не защищает РЛС от активных помех.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей, таким образом, является повышение защищенности РЛС от поражения ПРР и от активных помех.
Указанный технический результат достигается тем, что в способе защиты РЛС от ПРР, заключающемся в излучении ложных сигналов с помощью N постановщиков ложных сигналов, согласно изобретению измеряют координаты ПЛС, измеренные координаты сравнивают с заданными и при их отличии на величину, большую пороговой, формируют команды управления, с помощью которых перемещают ПЛС в заданную точку пространства или по заданным траекториям.
Поставленная задача решается также тем, что:
- траектории и координаты ПЛС задают, исходя из условия формирования траектории движения ПРР, уводящей ее в район, безопасный для РЛС;
- координаты ПЛС при известных координатах постановщика активных помех (ПАП) или ПРР выбирают исходя из условия удаления ПЛС от помехоносителя (ПРР) на расстояние, определяемое по формуле
где Rл, Rр - расстояние от ПАП (ПРР) до ПЛС и РЛС соответственно;
Рл, Рр - мощность ложных и рабочих импульсов соответственно;
Gл, Gр - коэффициент усиления антенны ПЛС и РЛС соответственно в направлении фона ДНА;
- в радиолокационном комплексе для защиты РЛС от ПРР, состоящем из РЛС и N ПЛС, все или часть ПЛС расположены на подвижных носителях, траекториями движения которых управляют с помощью РЛС;
- в РЛС, содержащую последовательно соединенные ЗУ команд управления ПЛС, блок кодирования, передатчик, развязывающее устройство и антенну, приемник, соединенный со вторым выходом развязывающего устройства, введены последовательно соединенные блок декодирования, блок измерения дальности до ПЛС и блок сравнения, запоминающее устройство (ЗУ) координат ПЛС, при этом первый вход блока декодирования соединен с выходом приемника, второй его вход и второй вход блока измерения дальности до ПЛС соединены со вторым входом блока кодирования, второй вход блока сравнения соединен с координатным выходом антенны, а выход блока сравнения соединен с первым входом блока кодирования, вход ЗУ координат ПЛС соединен с выходом блока измерения дальности до ПЛС, а выход его соединен с третьим входом блока сравнения;
- в ПЛС, содержащий последовательно соединенные приемную антенну, приемник, блок декодирования, блок управления передатчиком, передатчик ложных сигналов и передающую антенну, введены последовательно соединенные ЗУ траекторий ПЛС и автопилот, при этом вход ЗУ соединен со вторым выходом блока декодирования, третий выход которого соединен со вторым входом автопилота.
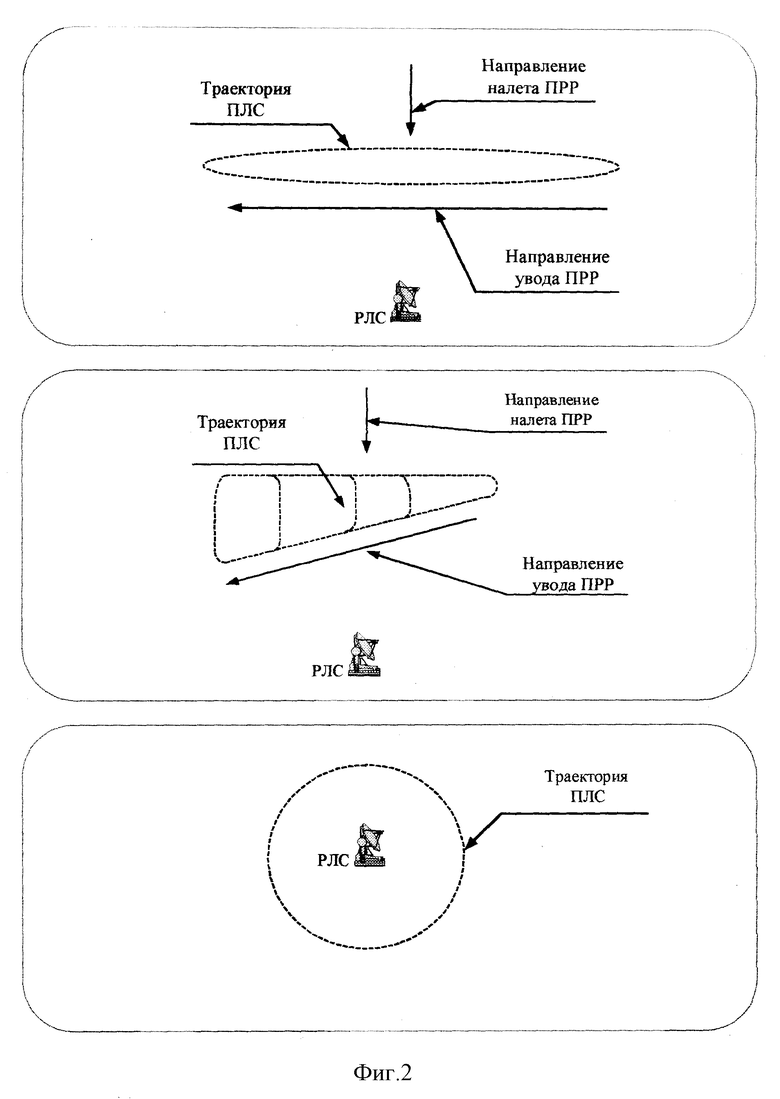
Поясним суть предлагаемого решения (фиг. 2).
Увеличение защищенности РЛС от поражения ПРР в предлагаемом способе достигается путем отвлечения ПРР в полете с помощью передатчиков, имитирующих сигналы защищаемой РЛС и расположенных на подвижных носителях. Производится оперативное формирование группой ПЛС заградительной зоны, обеспечивающей увод ПРР в район, безопасный для РЛС (район уничтожения или падения вследствие исчерпания энергетического ресурса ПРР). Заградительная зона может формироваться как по информации о расположении фронта налета и предполагаемых направлений пуска ПРР, так и индивидуально по отдельным ПРР. В последнем случае может использоваться информация об обнаружении ПРР защищаемыми РЛС.
В способе реализуется возможность приближения отвлекающего источника излучения к ПРР на расстояние, при котором энергия электромагнитного поля сравнительно маломощного передатчика превышает энергию сигнала защищаемой РЛС (по фону ДНА). Выигрыш в мощности передатчика ложных сигналов относительно случая, когда он расположен вблизи защищаемой РЛС, определяется соотношением
(Pр/Pл = (Gл/Gр)(Rр/Rл)2,
где Pр, Pл - излучаемая мощность рабочих и ложных сигналов (РЛС и ПЛС соответственно);
Gл, Gр - коэффициент усиления антенны и защищаемой РЛС в боковом направлении и антенны ПЛС соответственно;
Rр, Rл - удаление ПРР от защищаемой РЛС и ПЛС соответственно.
Достигаемое при этом уменьшение требуемой мощности отвлекающего источника позволяет уменьшить его вес и разместить на сравнительно небольших и дешевых дистанционно управляемых носителях (например, дистанционно пилотируемых летательных аппаратах - ДПЛА). Подвижность и управляемость таких носителей дает возможность достаточно оперативно формировать из них заградительные зоны различной конфигурации, оптимальные с точки зрения складывающейся ситуации налета и позволяющие осуществлять отвлечение и увод ПРР в направлениях, безопасных для защищаемой РЛС.
Каждый ПЛС имеет индивидуальную систему кодирования сигналов, управляющих излучением ложных сигналов и параметрами движения. Наличие системы активного ответа позволяет путем последовательных посылок кодированных сигналов определить все три координаты каждого ПЛС и, управляя их перемещением, формировать оптимальную заградительную зону.
Так, при излучении сигнала, содержащего команду на излучение i-го ПЛС, измеряют интервал времени между моментом излучения и моментом приема от него первой посылки ответных импульсов, что позволяет измерить дальность. Угловые координаты ПЛС измеряют по положению главного лепестка ДНА РЛС, принимающей излучение ПЛС. На основании измерения координат каждого из ПЛС и сравнения с заданными могут вырабатываться новые команды управления, изменяющие траектории любого ПЛС. При необходимости обеспечения столкновения ПРР с поверхностью земли цепочка ПЛС может быть сформирована с частичным применением зависших ПЛС, например, с помощью привязных малогабаритных аэростатов, ПЛС, установленных на мачтах, холмах и т.д. Управление такими ПЛС осуществляют только командами включения-выключения.
Зона, в которую обеспечивается увод ПРР (если в ней не производится уничтожение ПРР огневыми средствами), должна располагаться от РЛС на расстоянии, превышающем радиус действия нерадиолокационных средств наведения ПРР (телевизионных, инфракрасных, наземных) либо дальность, которую способен преодолеть ПРР за счет оставшегося энергетического ресурса.
Кроме того, в предлагаемом техническом решении использование N ПЛС, каждый из которых формирует ложный импульс в своей полосе частот Δfi, вынуждает постановщик активных помех ставить вместо прицельной помехи с полосой Δf заградительную с полосой 
При этом ПАП, имея ограниченные энергетические ресурсы, вынужден сокращать спектральную плотность мощности активной помехи в  раз.
раз.
Изобретение иллюстрируется следующими чертежами.
Фиг. 1 - блок-схема реализации известного способа.
Фиг. 2 - некоторые возможные конфигурации уводящей цепочки ПЛС, создающие электронную заградительную зону защиты РЛС от ПРР.
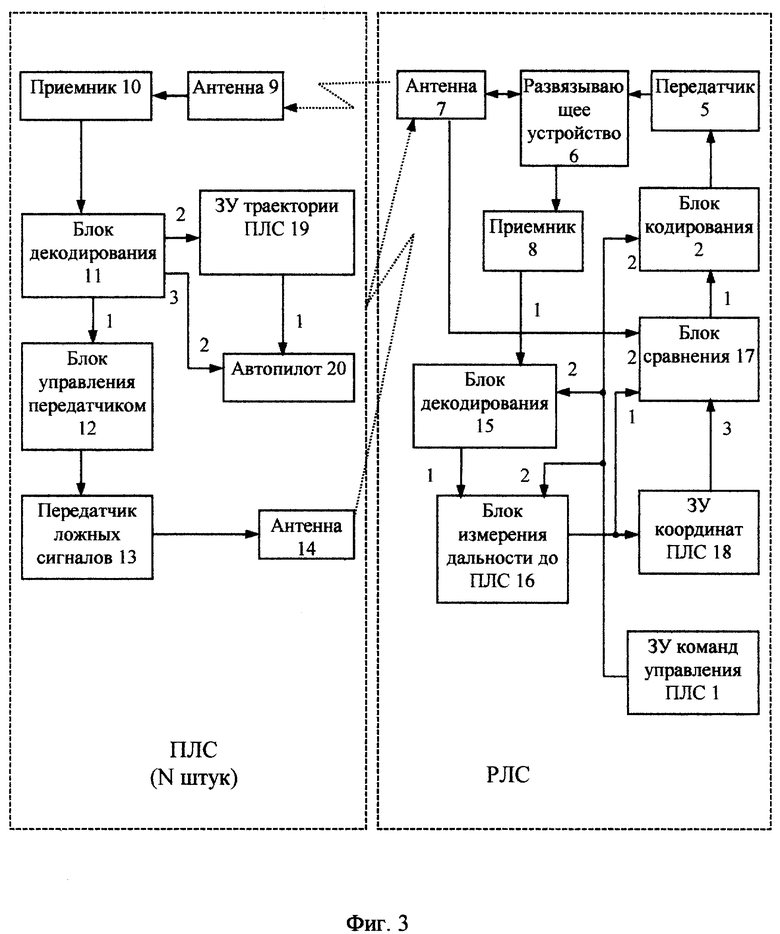
Фиг. 3 - блок-схема комплекса, реализующего предложенный способ защиты РЛС от ПРР.
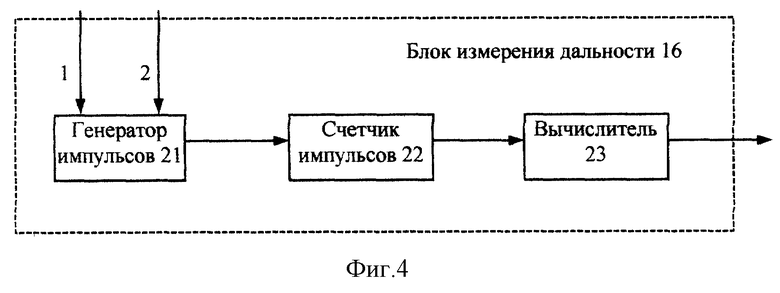
Фиг. 4 - блок-схема блока измерения дальности до ПЛС 16.
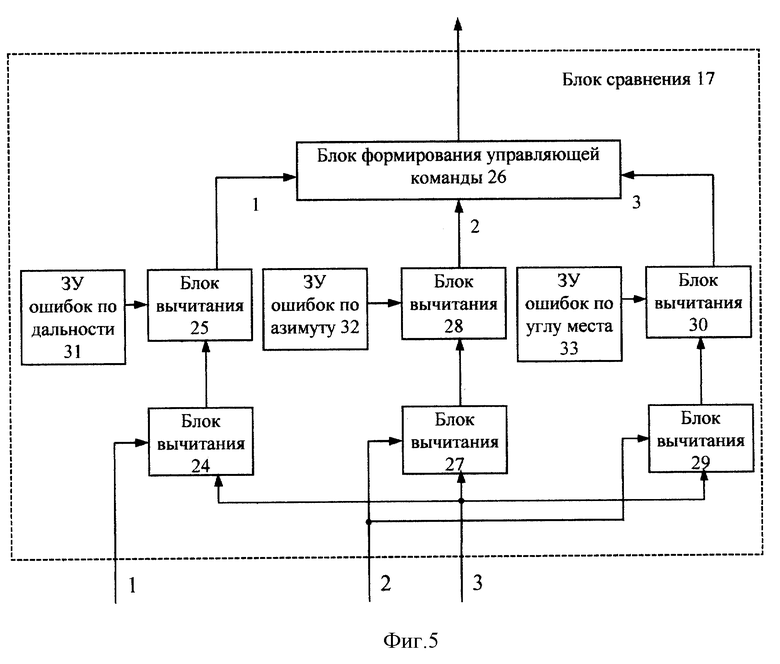
Фиг. 5 - блок-схема блока сравнения 17.
Комплекс для защиты РЛС от поражения ПРР (фиг. 3) содержит последовательно соединенные ЗУ команд управления ПЛС 1, блок кодирования 2, передатчик 5, развязывающее устройство 6 и антенну 7, приемник 8, вход которого соединен со вторым выходом развязывающего устройства 6, последовательно соединенные второй блок декодирования 15, блок измерения дальности до ПЛС 16, блок сравнения 17, а также ЗУ координат ПЛС 18, при этом первый вход блока декодирования 15 соединен с выходом приемника 8, второй его вход и вход блока измерения дальности до ПЛС 16 соединены со вторым входом блока кодирования 2, второй вход блока сравнения 17 соединен с координатным выходом антенны 7, а выход блока сравнения 17 соединен с первым входом блока кодирования 2, вход ЗУ 18 соединен с выходом блока измерения дальности до ПЛС 16, выход его соединен с третьим входом блока сравнения 17.
Каждый из N постановщиков ложных сигналов (фиг. 3) содержит последовательно соединенные приемную антенну 9, приемник 10, блок декодирования 11, блок управления передатчиком 12, передатчик ложных сигналов 13 и передающую антенну 14, последовательно соединенные ЗУ траекторий ПЛС 19 и автопилот 20, при этом вход ЗУ 19 соединен со вторым выходом блока декодирования 11, третий выход которого соединен со вторым входом автопилота 20.
Блок измерения дальности до ПЛС 16 (фиг. 4) содержит последовательно соединенные генератор импульсов 21, счетчик импульсов 22 и вычислитель 23, выход которого является выходом блока. Второй вход блока 16 является входом импульсов запуска генератора импульсов 21, первый вход - входом импульсов выключения генератора 21.
Блок сравнения 17 (фиг. 5) содержит последовательно соединенные первый 24 и второй 25 блоки вычитания и блок формирования управляющей команды 26, второй вход которого соединен с последовательно соединенными третьим 27 и четвертым 28 блоками вычитания, а третий вход его соединен с последовательно соединенными пятым 29 и шестым 30 блоками вычитания. Вторые входы блоков вычитания 25, 28, 30 соединены соответственно с ЗУ ошибок по дальности 31, ЗУ ошибок по азимуту 32 и ЗУ ошибок по углу места 33. Второй вход блока вычитания 24 и соединенные между собой вторые входы блоков вычитания 27 и 29 являются соответственно первым и вторым входами блока сравнения 17, а соединенные между собой первые входы блоков вычитания 24, 27, 29 являются третьим входом блока 17. Выходом блока сравнения 17 является выход блока формирования управляющей команды 26.
Автопилот 20 построен в соответствии с известной схемой автономного управления летательного аппарата (Кочетков В.Т. и др. Теория систем телеуправления и самонаведения ракет. - М.: "Наука", 1964, с. 30). Первым входом автопилота 20 является вход программного устройства, а вторым входом - вход рулевого привода.
Прелагаемое устройство может быть выполнено на следующих функциональных элементах.
Блоки кодирования 2 и декодирования 11 и 15 - известные схемы разделения каналов по частотным, временным или кодовым признакам (Кочетков В.Т. и др. Теория систем телеуправления и самонаведения ракет. - М.: "Наука", 1964, с. 293 - 320).
Антенна 7 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т. 2, - М.: "Сов. радио", 1977, с. 132 - 138). В качестве антенн 9 и 14 ПЛС могут использоваться наборы вибраторов, конструктивное исполнение которых зависит от диапазона частот ПЛС.
Развязывающее устройство 6 может быть выполнено на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с. 146-147).
Приемники 8 и 10 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 343 - 344).
Блок управления передатчиком 12 - амплитудный модулятор (Справочник по основам радиолокационной техники. - М., 1967, с. 647).
Передатчики 5 и 13 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 278).
Генератор импульсов 21 - мультивибратор, работающий в режиме синхронизации (Справочник по основам радиолокационной техники. - М., 1967, с. 232-235).
Блок формирования управляющей команды 26 - цифровое многоразрядное запоминающее устройство. Цифровые элементы: ЗУ, блоки вычитания, счетчик импульсов 22, вычислитель могут быть выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М.: "Радио и связь", 1984).
Устройство работает следующим образом.
По командам оператора РЛС (или автоматически в определенные, заранее заданные моменты времени) из ЗУ команд управления ПЛС 1 в блок кодирования 2 выдается сигнал управления i-м ПЛС, соответствующий номеру i (i = 1,..., N) ПЛС и отличающийся от сигналов управления другими ПЛС выбранной системой признаков. Одновременно сигнал управления подается в блок декодирования 15 для установки кода, соответствующего i-му ПЛС (настройка блока на прием сигнала от i-го ПЛС), и в блок измерения дальности до ПЛС 16, где запускается генератор импульсов 21, который вместе со счетчиком импульсов 22 выполняет функцию счетчика времени при вычислении дальности до ПЛС в вычислителе 23. Сигнал управления кодируется в блоке кодирования 2 в соответствии с выбранной системой кодирования, преобразуется в высокочастотный сигнал в передатчике 5 и излучается через антенну 7.
Принятый антенной 9 ПЛС высокочастотный кодированный сигнал преобразуется в приемнике 10 на видеочастоту и поступает в блок декодирования 11. На выходе блока 11 сигнал появляется только в том случае, если закодированные признаки соответствуют данному ПЛС. В зависимости от информации, содержащейся в принятом сигнале, блок декодирования 11 выдает команды: в блок управления передатчиком 12 для управления выбором режима излучения; в ЗУ траекторий ПЛС 19 для выбора траектории из записанных там и выдачи ее в программное устройство автопилота 20; непосредственно на исполнительные устройства автопилота 20 для обеспечения перемещения в требуемом направлении. Формируемый в передатчике 13 высокочастотный сигнал излучается посредством антенны 14. Сигнал имеет признак, отличающий его от сигналов других ПЛС.
После получения сигнала, излученного ПЛС, в приемнике 8 РЛС производится преобразование его на видеочастоту, а в блоке 15 - декодирование сигнала. Сигнал с выхода блока декодирования 15 поступает на вход блока измерения дальности до ПЛС 16 и останавливает генератор импульсов 21. В вычислителе 23 вычисляется дальность до ПЛС относительно РЛС в соответствии с формулой
R=Nсиc/(2fги),
где Nси - содержимое счетчика импульсов 22;
fги - частота следования импульсов генератора 21;
с - скорость света.
Сигнал с выхода блока измерения дальности до ПЛС 16 является одновременно и импульсом считывания информации, записанной в ЗУ координат ПЛС 18. Полученное значение дальности и соответствующие полученной дальности угловые координаты положения луча антенны поступают в блок сравнения 17, где они сравниваются с соответствующими координатами точек в заградительной зоне, записанной в ЗУ 18. В окрестность точки пространства с координатами, записанными в ЗУ 18, требуется вывести данный ПЛС. Рассогласования по координатам, полученные в блоках 24, 27, 29, сравниваются с их допустимыми значениями, хранящимися в ЗУ 31, 32, 33, и если рассогласования превышают их, то в блоке формирования управляющей команды 26 в соответствующие разряды цифрового слова записываются требуемые изменения координат. Полученная команда в блоке кодирования 2 дополняется признаком ПЛС, кодом режима работы передатчика и излучается.
После вывода ПЛС в заданную область в соответствии в записанной в ЗУ 18 информацией на ПЛС может быть выдана команда выбора определенной, заранее заданной траектории из имеющихся в ЗУ 19. В этом случае автопилот 20 самостоятельно определяет величину и направление управляющих воздействий с использованием автономной системы управления.
Последовательной выдачей команд управления ПЛС оператор выводит все ПЛС в заданный район создания заградительной зоны для ПРР или в зону действия ПАП. Изменение содержимого ЗУ 18 позволяет оперативно изменять конфигурацию заградительной зоны для обеспечения наибольшей эффективности при отвлечении и уводе ПРР или отвлечения ресурсов ПАП.
Предлагаемое техническое решение относится к радиолокации и может быть использовано для повышения защищенности радиолокационной станции (РЛС) от наводящихся по излучению РЛС противорадиолокационных ракет (ПРР) и от активных помех (АП). Технический результат - повышение защищенности РЛС от поражения ПРР и от активных помех. Поставленная задача решается тем, что в способе защиты РЛС от ПРР, заключающемся в излучении ложных сигналов с помощью N постановщиков ложных сигналов (ПЛС), согласно изобретению измеряют координаты ПЛС, измеренные координаты сравнивают с заданными и при их отличии на величину, большую пороговой, формируют команды управления, с помощью которых перемещают ПЛС в заданную точку пространства или по заданным траекториям. Поставленная задача решается также тем, что в радиолокационном комплексе для защиты РЛС от ПРР, состоящем из РЛС и N ПЛС, все или часть ПЛС расположены на подвижных носителях, траекториями движения которых управляют с помощью РЛС. 4 с. и 4 з.п. ф-лы, 5 ил.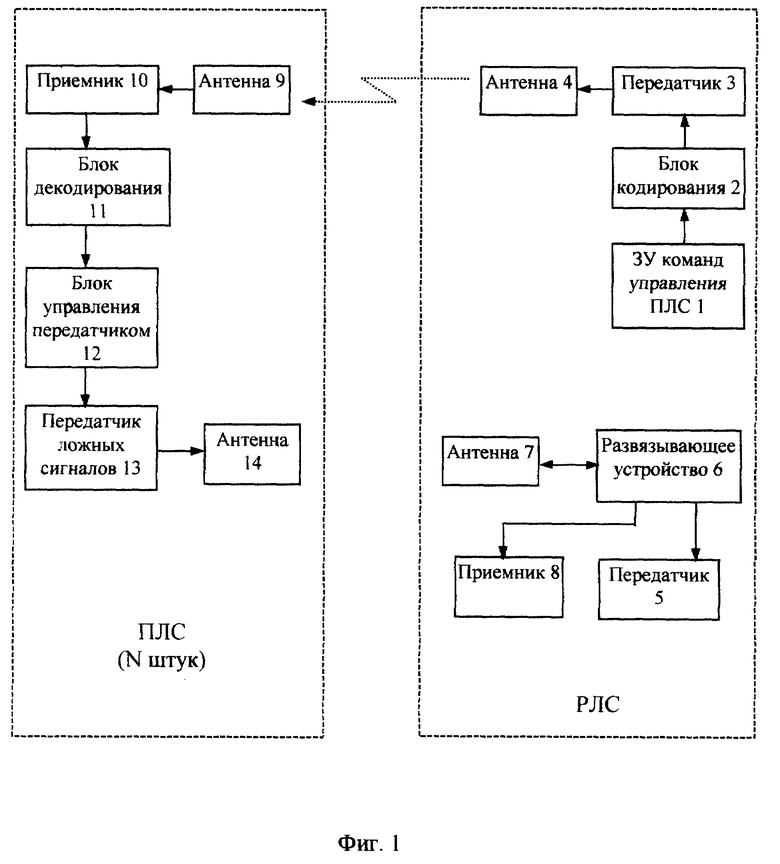
где Rл, Rр - расстояние от ПАП (ПРР) до ПЛС и РЛС соответственно;
Rл, Rр - мощность ложных и рабочих импульсов соответственно;
Gл, Gр - коэффициент усиления антенны ПЛС и РЛС соответственно в направлении фона диаграммы направленности антенны.
| US 4433333 A, 21.02.1984 | |||
| НЕБАБИН В.Г | |||
| Защита РЛС от противорадиолокационных ракет | |||
| -Зарубежная радиоэлектроника, № 5, 1990, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Способ замедления выпадания глинозема из раствора алюмината натрия в осадок при производстве глинозема | 1933 |
|
SU37075A1 |
| Приспособление для группового фрезерования замка поршневых колец | 1947 |
|
SU73162A1 |
| US 4322730 A, 30.03.1982 | |||
| US 4763128 A, 09.08.1988. | |||

