Изобретение относится к области радиолокации и может быть использовано для повышения помехозащищенности в отношении нестационарных помех.
Одним из наиболее эффективных видов помех для РАС являются импульсные, так как энергетические затраты на их формирование существенно ниже, чем на формирование непрерывной шумовой помехи.
В случае, когда параметры сигнала РАС, например, вид внутриимпульсной модуляции, не известны ПАП, он может излучать широкополосные помехи, представляющие собой короткие импульсы со спектром, охватывающим часть рабочего диапазона РЛС. Кроме того, вместо непрерывной шумовой помехи он может ставить дискретную в разных частотных каналах. Эти виды помех относятся к нестационарным. Они создают высокий уровень ложной тревоги и перегружают устройства обработки РЛС при нахождении ПАП как в области главного лепестка диаграммы направленности антенны (ДН), так и в области боковых лепестков.
При этом затраты энергии ПАП на формирование этого вида помех также могут быть существенно ниже, чем на формирование заградительной шумовой помехи.
Классическим способом подавления помех является оптимальная обработка сигнала (Теоретические основы радиолокации. Под ред. Ширмана Я.Д. М.: Сов. радио, 1970, с.110). Суть ее заключается в вычислении корреляционного интеграла в т.ч. в согласованном фильтре:
где х(t,α) - ожидаемый сигнал;
y(t) - принимаемое колебание;
в усреднении полученного значения для сигнала со случайной начальной фазой путем фильтрации огибающей и в сравнении отфильтрованного колебания с порогом, устанавливаемым по определенному критерию принятия решения о наличии сигнала.
Для обнаружения радиолокационных сигналов принят критерий Неймана-Пирсона (там же с.92), для реализации которого пороговый уровень устанавливается таким, чтобы уровень ложной тревоги при действии помех не превышал заданного уровня.
Теорией доказано, что на фоне нормального шума ни один из линейных фильтров не может дать отношение сигнал/помеха больше, чем оптимальный фильтр. В этом случае вероятность обнаружения во многом определяется правильностью установки порога принятия решения при изменении уровня помехи. Для этого на выходе канала обнаружения поддерживается заданный уровень шумов с помощью системы автоматической регулировки усиления (АРУ) (Максимов М.В. Защита от радиопомех. М.: Сов. радио, 1976, с.197).
Устройство, реализующее способ оптимального обнаружения радиолокационного сигнала содержит последовательно соединенные устройство согласованной фильтрации, вход которого является входом всего устройства, детектор огибающей (с постоянной времени τс) и пороговое устройство, выход которого является выходом всего устройства, а также последовательно соединенные детектор АРУ, усилитель и фильтр (с постоянной времени  ), выход которого подключен к управляющему входу устройства оптимальной фильтрации, выход которого подключен к первому входу детектора АРУ, второй вход которого является управляющим входом всего устройства (см. фиг.1а).
), выход которого подключен к управляющему входу устройства оптимальной фильтрации, выход которого подключен к первому входу детектора АРУ, второй вход которого является управляющим входом всего устройства (см. фиг.1а).
Работа устройства осуществляется следующим образом. Принимаемое колебание с выхода устройства согласованной фильтрации через детектор огибающей поступает на пороговое устройство. Кроме того, его подают на вход детектора АРУ, после усиления в усилителе через фильтр подают на управляющий вход устройства согласованной фильтрации. Параметры канала АРУ выбраны так, что при превышении напряжения продетектированного колебания в детекторе АРУ напряжения задержки U3, подаваемого на управляющий вход, оно после усиления и фильтрации с постоянной времени уменьшает усиление устройства оптимальной фильтрации до тех пор, пока уровень колебания в детекторе АРУ не будет равным Е3. Это обеспечивает постоянство напряжения помехи на входе порогового устройства.
Для того чтобы схема АРУ не подавляла рабочие сигналы, постоянная времени в фильтре АРУ τп выбирается много больше длительности сигнала τс. Это приводит к тому, что этот способ обеспечивает подавление только, в основном, стационарных помех.
При действии нестационарной помехи, особенно в виде мощных импульсов малой длительности, уровень ложной тревоги может существенно возрастать. Это происходит в связи с тем, что из-за большой мощности помехи, часть ее спектра, соответствующая спектру в области боковых лепестков частотной характеристики устройства оптимальной фильтрации, создаст на выходе детектора огибающей напряжение, превышающее уровень порогового устройства, т.к. при этом канал АРУ не сработает, поскольку у него  а длительность помехи сравнима с τс.
а длительность помехи сравнима с τс.
Таким образом, недостаток способа состоит в том, что он не обеспечивает подавление широкополосной нестационарной помехи.
Известен способ оптимальной фильтрации сигнала на фоне нестационарной помехи, основанный на режекции спектра помехи (Теоретические основы радиолокации. Под ред. Ширмана Я.Д. М.: Сов. радио, 1970, с.442).
Суть его состоит в том, что в канал оптимальной обработки включается режекторный фильтр, вырезающий из спектра принимаемого колебания спектр помехи (фиг.1б).
Работа устройства основана на том же принципе, что и работа устройства на фиг.1а, только в данном случае режекторный фильтр исключает прохождение нестационарной помехи на вход устройства оптимальной фильтрации и таким образом обработка сигнала осуществляется только на фоне стационарной помехи.
Недостаток этого способа состоит в том, что он не применим в случае, когда спектр помехи не известен.
Наиболее близким техническим решением является способ обнаружения радиолокационных сигналов с формированием следящего порогового напряжения в условиях воздействия нестационарных помех (Белинский В.Т. и др. Сравнение способов формирования порога в системах, стабилизирующих вероятность ложных тревог. Известия вузов. Радиоэлектроника. № 4, 1977, с.109).
Суть его состоит в том, что проводят оптимальную обработку принимаемого колебания, состоящую из согласованной фильтрации и фильтрации огибающей с постоянной времени τс, в сравнении отфильтрованного колебания с порогом, устанавливаемым в зависимости от уровня помех, измеренного в интервале времени, включающем в себя интервал вероятного приема сигнала, путем усреднения напряжения помех за время 
В отличие от описанного выше способа, когда усредненный уровень помехи в АРУ воздействует на усиление устройства согласованной фильтрации, в способе-прототипе воздействие происходит на пороговый уровень принятия решения о наличии сигнала.
Обобщенная блок-схема одного из вариантов устройства, реализующего этот способ, приведена на фиг.2. Она содержит устройство оптимальной обработки сигнала, включающее последовательно соединенные согласованный фильтр 1, вход которого является входом всего устройства, детектор 2 и первый фильтр 3 (детектор огибающей) нижних частот, реализующие операцию фильтрации огибающей с постоянной времени τс. Кроме того, содержит последовательно соединенные второй фильтр 4 нижних частот, реализующий операцию усреднения напряжения помехи за время  вычитающее устройство 5 и пороговое устройство 6, реализующие операцию установки порогового уровня и сравнения с ним отфильтрованного принятого колебания, выход порогового устройства является выходом всего устройства. Причем, выход первого фильтра 3 подключен ко второму входу вычитающего устройства 5, а вход второго фильтра 4 подключен к выходу детектора 2.
вычитающее устройство 5 и пороговое устройство 6, реализующие операцию установки порогового уровня и сравнения с ним отфильтрованного принятого колебания, выход порогового устройства является выходом всего устройства. Причем, выход первого фильтра 3 подключен ко второму входу вычитающего устройства 5, а вход второго фильтра 4 подключен к выходу детектора 2.
Устройство работает следующим образом. Принимаемое колебание после согласованной фильтрации и детектирования с выхода детектора 2 поступает на вход фильтров 3 и 4, соответственно, фильтра сигнала ФНЧ-С и помехи ФНЧ-П. Отличие фильтров состоит в различной постоянной времени. Постоянная времени фильтра 4 (ФНП) много больше длительности сигнала, т.е. как и в устройствах-аналогах, должно выполняться условие чтобы исключить прохождение отраженного от цели сигнала через фильтр 4 и вычитание его из этого же сигнала, прошедшего через фильтр 3. Таким образом, фильтр 4 измеряет средний уровень принимаемого колебания на выходе согласованного фильтра 1 за интервал времени τп и, в зависимости от этого, устанавливает с помощью вычитающего устройства 5 и порогового устройства 6 пороговый уровень отбора сигнала с выхода фильтра 3.
Основной недостаток этого способа состоит в невозможности подавления широкополосных импульсов с длительностью τп≤τс. Это происходит от того, что напряжение на выходе фильтра 4 за время действия импульса помехи практически не изменится, т.к. время усреднения фильтром 4 и пороговый уровень останется тем же, что и был до приема помехи, в то же время импульс помехи фильтр 3 пройдет так же, как и импульс сигнала при τп≈τс, т.е. основная причина в невозможности подавления широкополосных импульсов помехи состоит в неравенстве времени усреднения в цепи формирования сигнала и порогового уровня отбора сигнала.
Целью изобретения является устранение отмеченного недостатка, а именно - подавление широкополосной нестационарной помехи.
Поставленная цель достигается тем, что в способе обнаружения радиолокационных сигналов, заключающемся в основной оптимальной обработке, состоящей из согласованной фильтрации и фильтрации огибающей, в сравнении отфильтрованного колебания с порогом, устанавливаемым в зависимости от уровня помех, измеренного в интервале времени, включающем в себя интервал вероятного приема сигнала, согласно изобретению уровень помех измеряют после декорреляции принимаемого колебания, например, за счет модуляции фазы, и оптимальной его обработки, аналогичной основной, выполняемой одновременно с ней.
Т.е. цель достигается тем, что для формирования порогового напряжения принятое колебание обрабатывается точно так же, как и сигнал, что обеспечивает получение τп=τс, а для того, чтобы исключить практическое влияние сигнала на формирование порога (в прототипе это достигается за счет  ) принимаемое колебание перед оптимальной обработкой, выполняемой для формирования порогового напряжения, декоррелируют. В конечном итоге правильно установить порог для подавления нестационарной помехи можно, если измерить ее уровень на выходе канала обработки сигнала при его отсутствии. Для этого и предлагается при формировании порогового напряжения использовать те же операции, что и при обработке сигнала, но после операции декорреляции, чтобы исключить влияние рабочего сигнала на результаты измерения уровня помехи.
) принимаемое колебание перед оптимальной обработкой, выполняемой для формирования порогового напряжения, декоррелируют. В конечном итоге правильно установить порог для подавления нестационарной помехи можно, если измерить ее уровень на выходе канала обработки сигнала при его отсутствии. Для этого и предлагается при формировании порогового напряжения использовать те же операции, что и при обработке сигнала, но после операции декорреляции, чтобы исключить влияние рабочего сигнала на результаты измерения уровня помехи.
Поставленная цель достигается также тем, что в устройство обнаружения радиолокационного сигнала, содержащее последовательно соединенные согласованный фильтр, вход которого является входом устройства, детектор огибающей (в прототипе это детектор + ФНЧ), вычитающее и пороговое устройства, выход последнего является выходом всего устройства, согласно изобретению введены последовательно соединенные фазовращатель, дополнительные согласованный фильтр и детектор огибающей, а также введен модулятор, причем, первый вход фазовращателя подключен ко входу всего устройства, а второй вход к выходу модулятора, а выход дополнительного детектора - ко второму входу вычитающего устройства. Дополнительные согласованный фильтр и детектор огибающий образуют дополнительное устройство оптимальной обработки, а первые - основной.
Введение дополнительного устройства оптимальной обработки сигнала обеспечивает формирование порогового сигнала при действии помех в тот же интервал времени, в который появляется эта помеха на выходе основного устройства, что исключает ее прохождение (после вычитания в вычитающем устройстве) через пороговое устройство, независимо от длительности импульса помехи, а введение фазовращателя и модулятора обеспечивает декорреляцию сигнала и практически исключает воздействие рабочих сигналов РЛС на формирование порогового уровня в дополнительном устройстве оптимальной обработки, что исключает их подавление.
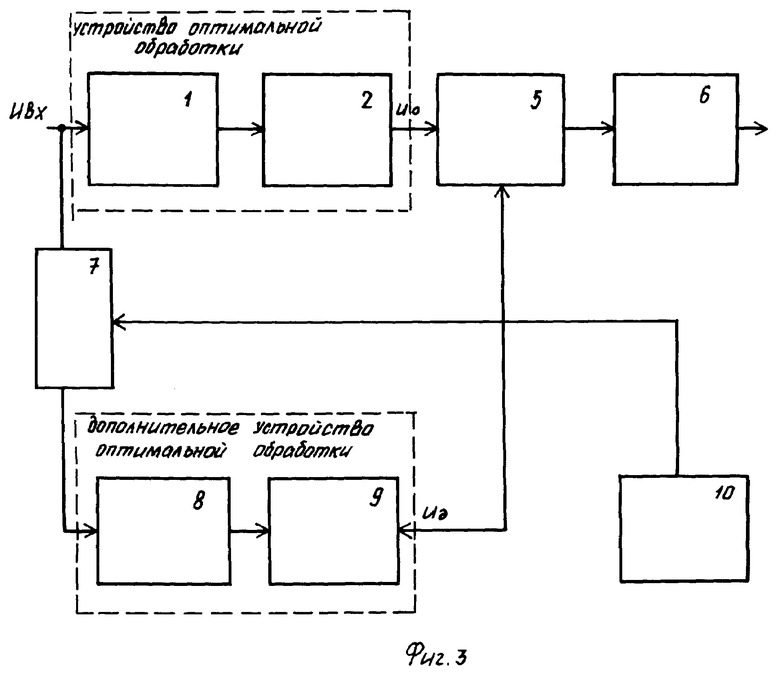
На фиг.2 представлена функциональная схема устройства-прототипа, на фиг.3 - предлагаемого устройства, на фиг.4 - фазовращателя.
Предлагаемое устройство содержит последовательно соединенные согласованный фильтр 1, детектор огибающей 2, вычитающее устройство 5 и пороговое устройство 6, выход которого является выходом всего устройства. Устройство также содержит последовательно соединенные фазовращатель 7, дополнительные согласованный фильтр 8 и детектор 9 огибающей, а также модулятор 10. Причем первый вход фазовращателя 7 подключен к входу всего устройства, а второй - к входу модулятора 10; выход дополнительного детектора 9 подключен ко второму входу вычитающего устройства 5.
Устройство работает следующим образом. При появлении рабочего сигнала на входе согласованного фильтра 1 на выходе детектора 2 огибающей будет получено напряжение максимального уровня, определяемого энергией сигнала, т.е. Uo=Uмакс. На вход дополнительного согласованного фильтра 8 сигнал поступит с выхода фазовращателя 7, фазовый сдвиг в котором под действием колебания модулятора 10 за время действия импульса будет изменяться так, что на входе фильтра 8 структура импульса будет искажена и фильтр 8 для сигнала не будет согласованным, а при изменении фазы в пределах 0÷π сигнал в фильтре будет практически подавлен, т.е. Uд→0. При этом на выходе вычитающего устройства 5 получим
Uo-Uд→Uмакс>Uпор.
Если на входе устройства действует некоррелированная с сигналом помеха, то реакция согласованного фильтра 1 и дополнительного согласованного фильтра 8 в среднем будет одинаковой, как реакция на шумовой сигнал:


Таким образом будет обеспечиваться подавление нестационарной помехи независимо от ее длительности.
Способ реализации и принцип работы используемых фильтров 1, 8, детекторов 2, 9, вычитающего устройства 5, порогового устройства 6 общеизвестны (ссылки даны выше).
В качестве модулятора 10 может быть использован любой генератор колебаний, например, генератор видеоимпульсов, генератор синусоидальных колебаний, генератор шума или генератор меандра в зависимости от вида фазовращателя и сигнала. Для примера на фиг.4 приведена функциональная схема простейшего варианта фазовращателя, соединенного с генератором.
В качестве фазовращателя 7 используют последовательно соединенные электронный коммутатор 11 и линию задержки 12.
Коммутатор 11 имеет сигнальный вход 1, управляющий вход и два сигнальных выхода 2, 3. В начальном состоянии вход 1 коммутатора 11 соединен с его выходом 1 и принимаемое колебание подается на вход фильтра 8 без задержки. Под действием импульса с модулятора 10 вход 1 коммутатора 11 замыкается на выход 2 и колебание поступает на вход линии задержки (ЛЗ) 12, в результате чего фаза сигнала на входе фильтра 8 сдвинется на величину Δϕ=2πfct3, где t3 - величина задержки ЛЗ, fc - несущая частота сигнала. При  получим Δϕ÷π. Если в качестве модулятора 10 использовать генератор шума, то длительность интервала времени, в котором находится коммутатор 11, в каждом положении будет величиной случайной, поэтому фаза сигнала на входе фильтра 8 будет также случайной (дополнительный сдвиг 0 или π), что и приведет к его декорреляции. Если же в качестве модулятора 10 использовать генератор меандра с целым числом периодов, укладывающихся во временном интервале действия рабочего сигнала, то для симметричного импульса на выходе фазовращателя энергия одной его части со сдвигом фазы на π будет равна энергии части импульса без дополнительного сдвига, в результате чего в согласованном фильтре 8 они взаимно скомпенсируются (Uд=0) и это обеспечит исключение влияния рабочего сигнала на формирование вычитающего напряжения на выходе детектора 9 (напряжение следящего порога). В то же время для любого колебания, некоррелированного с сигналом (т.е. дли помехи), в фильтре 8 взаимной компенсации не произойдет, и , что обеспечит подавление помехи в вычитающем и пороговом устройствах.
получим Δϕ÷π. Если в качестве модулятора 10 использовать генератор шума, то длительность интервала времени, в котором находится коммутатор 11, в каждом положении будет величиной случайной, поэтому фаза сигнала на входе фильтра 8 будет также случайной (дополнительный сдвиг 0 или π), что и приведет к его декорреляции. Если же в качестве модулятора 10 использовать генератор меандра с целым числом периодов, укладывающихся во временном интервале действия рабочего сигнала, то для симметричного импульса на выходе фазовращателя энергия одной его части со сдвигом фазы на π будет равна энергии части импульса без дополнительного сдвига, в результате чего в согласованном фильтре 8 они взаимно скомпенсируются (Uд=0) и это обеспечит исключение влияния рабочего сигнала на формирование вычитающего напряжения на выходе детектора 9 (напряжение следящего порога). В то же время для любого колебания, некоррелированного с сигналом (т.е. дли помехи), в фильтре 8 взаимной компенсации не произойдет, и , что обеспечит подавление помехи в вычитающем и пороговом устройствах.
Таким образом, использование предлагаемого способа обеспечивает возможность формирования следящего порогового напряжения с той же постоянной времени, что и сигнала, в то же время исключает прохождение его в канал формирования следящего порога, а это обеспечивает подавление широкополосных нестационарных помех при сохранении условий приема сигнала.


Изобретение относится к области радиотехники и может быть использовано для повышения помехозащищённости в отношении нестационарных помех. Техническим результатом является подавление нестационарных широкополосных помех. Технический результат достигается за счёт того, что в способе обнаружения радиолокационных сигналов, основанным на согласованной фильтрации с усилением сигнала и фильтрации его огибающей, на сравнении отфильтрованного колебания с порогом, который устанавливают в зависимости от уровня помех в интервале времени, заключающем в себя интервал вероятного приема сигнала, одновременно с основной обработкой в принимаемом колебании разрушают корреляционную структуру рабочего сигнала, после чего обрабатывают колебание аналогично основной обработке, измеряют уровень помех и по полученному уровню устанавливают порог обнаружения. Устройство для обнаружения радиолокационного сигнала содержит согласованный фильтр, детектор огибающей, вычитающее устройство, пороговое устройство фазовращатель, модулятор и дополнительные согласованные фильтр и детектор огибающей. 4 ил.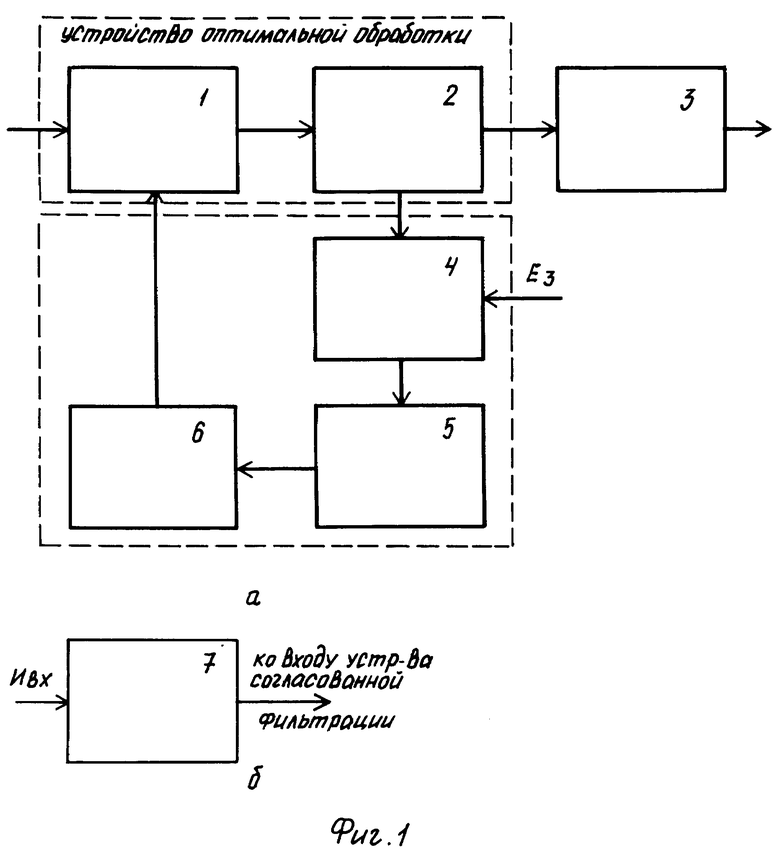
| Теоретические основы радиолокации | |||
| Под ред | |||
| Я.Д.Ширнана | |||
| М.: Сов | |||
| радио, 1970, с | |||
| Орнито-геликоптер | 1919 |
|
SU442A1 |
| Известия вузов Радиоэлектроника, № 4, 1977, с.109. | |||

