Изобретение относится к области электроники, связанной с измерением поляризационных параметров векторных сигналов любой природы. Оно, в частности, может служить для измерения текущих величин большой или малой полуосей эллипса поляризации (ЭП), а также ориентации плоскости ЭП и его полуосей в пространстве. В настоящее время поляризационные измерения широко применяются в системах радиолокации, обнаружения излучателя, сейсмометрии, навигации, радиосвязи с пеленгационной модуляцией и др.
Известен способ измерения параметров эллипса поляризации электромагнитного поля, используемый в работе [1] для исследования поляризации СДВ-сигналов. Согласно этому аналогу сигналы, снимаемые с двух ортогональных датчиков (скрещенных вертикальных рамочных антенн), усиливают в узкополосных усилителях и подают на вертикальные и горизонтальные пластины электоролучевой трубки. Измерения осуществляют по изображению эллипса на экране ЭЛТ.
Однако аналог не позволяет оценить положение эллипса поляризации в пространстве и дает возможность определить значения параметров поляризации (коэффициент эллиптичности и угол отклонения большой полуоси) лишь для проекции реального эллипса на горизонтальную плоскость. Кроме того, аналог обладает малой разрешающей способностью во времени. Для осуществления измерений требуется, чтобы эллипс поляризации полностью отображался на экране. На это отображение требуется время, равное периоду колебаний. Вместе с тем, для быстротекущих процессов, когда параметры поляризации изменяются, например при перемещении излучателя, это время может быть слишком большим.
Указанных недостатков частично лишен прототип по авторскому свидетельству 398009 [2] , который основан на способе измерения эллиптически поляризованного поля. Прототип по указанному авторскому свидетельству предполагает:
- выделение пространственно-ортогональных компонент Ax, Ay, Az вектора сигнала;
- узкополосное усиление выделенных компонент на частоте ω;
- дифференцирование компонент;
- квадратичное усиление сигналов компонент;
- суммирование квадратично усиленных сигналов компонент для получения сигнала, пропорционального в квадратичной зависимости сигналу модуля вектора принимаемого поля;
- квадратичное усиление продифференцированных сигналов компонент;
- суммирование квадратично усиленных продифференцированных сигналов компонент для получения сигнала, пропорционального в квадратичной зависимости сигналу модуля из продифференцированных сигналов компонент;
- ослабление в ω раз сигнала модуля продифференцированных сигналов компонент;
- вычитание из сигнала модуля компонент ослабленного сигнала модуля производных;
- суммирование сигнала модуля компонент и ослабленного сигнала модуля производных;
- деление полученных сигналов разности на сигнал суммы;
- регистрацию полученного сигнала отношения.
В результате прототип обеспечивает получение сигнала, так называемой функции поляризации Фп, амплитуда которой пропорциональна соотношению большой а и малой b полуосей эллипса поляризации сигналов:
Недостатками прототипа являются:
- необходимость знания частоты ω принимаемого сигнала, для того чтобы ослабить в необходимое число раз сигнал модуля произвольных компонент;
- малая разрешающая способность измерений во времени, ограниченная величиной  лишь четыре раза за период входного сигнала значение функции поляризации соответствует реальному значению соотношения полуосей ЭП, поскольку это отношение промодулировано удвоенной частотой сигнала;
лишь четыре раза за период входного сигнала значение функции поляризации соответствует реальному значению соотношения полуосей ЭП, поскольку это отношение промодулировано удвоенной частотой сигнала;
- прототип не позволяет определить положение в пространстве плоскости ЭП и его полуосей.
В то же время для быстро текущих процессов, когда параметры поляризации изменяются, например, из-за перемещения излучателя или из-за наложения переотраженных сигналов, указанного временного разрешения может быть недостаточно и необходимо знать текущее значение полуосей в любой момент времени. Кроме того, является важным знание текущего положения в пространстве плоскости ЭП и его полуосей, так как в большинстве случаев эти величины связаны с направлением прихода волны. Например, Р-волна (продольная) в сейсмологии поляризована вдоль направления своего распространения, S-волна (поперечная) поляризована поперечно [3]. Поэтому выделение направления большой полуоси ЭП в Р-волне позволяет оценить азимут и угол выхода волны, связанный с удаленным излучателем. Выделение направления нормали к плоскости ЭП S-волны позволяет оценить те же характеристики излучателя в случае, когда приходящая первой Р-волна осложнена помехами. Поляризация поверхностных сейсмических волн также связана с направлением на источник волны. Плоскость ЭП волны Релея лежит в вертикальной плоскости распространения волны, поляризация волны Лява поперечна плоскости распространения.
Для электромагнитных волн, имеющих в свободном пространстве поперечную структуру, оценка положения нормали к плоскости ЭП магнитного или электрического поля волны также позволяет определить направление на излучатель. Указанная задача трехмерной пеленгации электромагнитных излучателей особенно актуальна в связи с развитием космических исследований.
Предлагаемый способ не имеет недостатков, свойственных прототипу. Целью способа является исключение необходимости знания круговой частоты принимаемого сигнала, повышение разрешающей способности измерений, определение наряду с полуосями ЭП положения в пространстве плоскости ЭП и его полуосей.
Для достижения указанных целей заявляемый способ предполагает осуществление следующей совокупности действий над сигналами:
выделяют пространственно-ортогональные компоненты Ax(t), Ay(t), Az(t) вектора сигнала;
дифференцируют сигналы компонент, получая сигналы 
квадратично усиливают сигналы продифференцированных компонент, получая 
повторно дифференцируют сигналы компонент, получая сигналы Äx(t),Äy(t),Äz(t);
формируют группу однокомпонентных сигналов ηi, для чего перемножают сигналы каждой ортогональной компоненты на ее дважды продифференцированный сигнал и вычитают этот сигнал произведения из сигнала квадратично усиленной продифференцированной компоненты:


формируют группу двухкомпонентных сигналов ηij, для чего попарно перемножают сигналы продифференцированных компонент, перемножают сигнал одной из компонент пары на сигнал другой, подвергнутый двойному дифференцированию, вычитают полученный сигнал произведения из сигнала парного произведения одноименных продифференцированных компонент и квадратично усиливают полученные сигналы разности:


выделяют три смешанных сигнала Cij, для чего попарно перемножают однокомпонентные сигналы и вычитают из сигнала каждой пары двухкомпонентный сигнал, составленный из тех же компонент, что и парное произведение однокомпонентных сигналов:
Cxy= ηxηy-ηxy;
Cxz= ηxηz-ηxz;
Cyz= ηyηz-ηyz;
суммируют смешанные сигналы:
Cxy+Cxz+Cyz;
масштабно усиливают в четыре раза сигнал суммы смешанных сигналов:
4(Cxy+Cxz+Cyz);
суммируют однокомпонентные сигналы
ηx+ηy+ηz;
квадратично усиливают сигнал суммы однокомпонентных сигналов:
(ηx+ηy+ηz)2;
вычитают промасштабированный сигнал из сигнала квадратично усиленной суммы однокомпонентных сигналов:
(ηx+ηz+ηy)2-4(Cxy+Cxz+Cyz);
деформируют полученный сигнал разности по обратной квадратичной зависимости: ;
;
суммируют деформированный сигнал с суммой однокомпонентных сигналов и одновременно вычитают деформированный сигнал из суммы однокомпонентных сигналов:
ηx+ηy+ηz_D;
ηx+ηy+ηz+D;
ослабляют в два раза сигналы суммы и разности, получая в результате сигналы ω2a2 и ω2b2, пропорциональные в квадратичной зависимости текущим произведениям большой и малой полуоси ЭП на круговую частоту: ,
, ;
;
сравнивают посредством деления каждый смешанный сигнал с суммой смешанных сигналов, получая в результате сигналы, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов нормали к плоскости ЭП:
где γni - угол между нормалью к плоскости ЭП и i-й осью системы координат расположения приемных датчиков (фиг. 1,а);
одновременно делят каждый смешанный сигнал на сигнал, пропорциональный большой полуоси ЭП, получая:


суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, относительно которой находят направляющий косинус большой полуоси ЭП и которая не входит в состав смешанного сигнала в сигнале отношения, получая


из каждого полученного сигнала суммы вычитают сигнал, пропорциональный малой полуоси ЭП, получая:
делят полученные сигналы разности на деформированный сигнал, получая в результате сигналы Kai2, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов большой полуоси ЭП:
где γai - угол между большой полуосью ЭП и i-й осью системы координат расположения приемных датчиков (фиг. 1,б);
одновременно делят каждый смешанный сигнал на сигнал, пропорциональный малой полуоси ЭП, получая сигналы:


суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, относительно оси которой находят направляющий косинус малой полуоси ЭП и которая не входит в состав смешанного сигнала в сигнале отношения:


из сигнала, пропорционального большой полуоси ЭП, вычитают полученные сигналы суммы, получая:
делят полученные сигналы разности на деформированный сигнал, получая в результате сигналы Kbi2, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов малой полуоси ЭП:
где γbi - угол между малой полуосью ЭП и i-й осью системы координат расположения приемных датчиков (фиг. 1, в).
В результате выполнения заявляемой последовательности выделяются сигналы ω2a2,ω2b2, пропорциональные непосредственно текущим значениям полуосей ЭП, а также выделяются сигналы Kni2; Kai2; Kbi2, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов нормали к плоскости ЭП, большой и малой полуосей ЭП относительно системы координат ориентации датчиков (доказательство см. в Приложении 1).
На фиг. 1 показаны измеряемые углы для нормали к плоскости ЭП, а также для малой и большой полуосей ЭП.
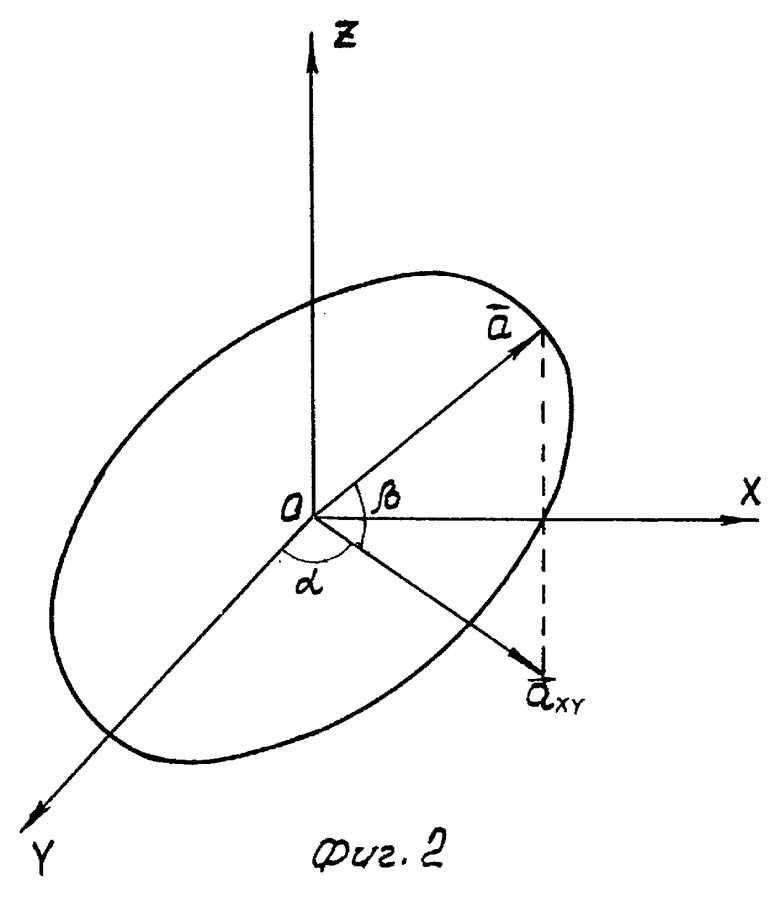
Знание направляющих косинусов для углов, задающих положение в пространстве нормали к плоскости ЭП и положения полуосей а, b, является исчерпывающим. Эти знания позволяют определить и другие часто используемые углы и величины, задающие положение полуосей и степень эллиптичности сигнала. В частности, через направляющие косинусы могут быть найдены широко применяемые для пеленгации текущий азимутальный угол α ориентации горизонтальной проекции большой полуоси ЭП относительно оси Y и угол выхода β отклонения большой полуоси ЭП от горизонтальной плоскости XOY (см. фиг. 2).
Из очевидных соотношений:
sin2β = K
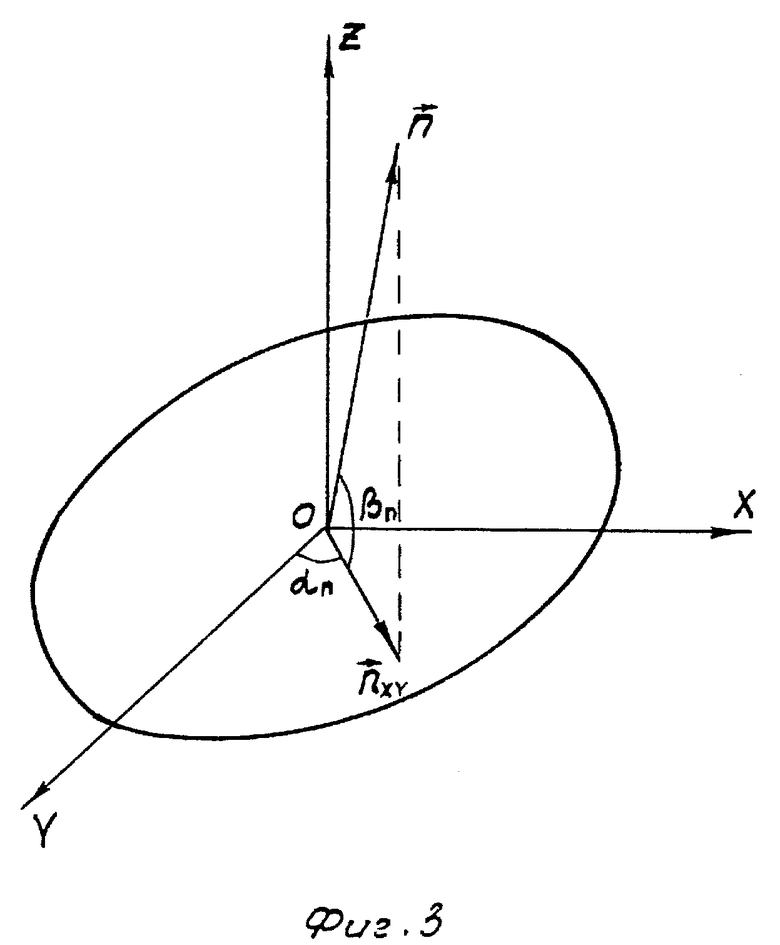
Для пеленгования излучателей по поперечным волнам (S-волна в сейсмологии, электромагнитные волны в космосе) целесообразен расчет текущего азимутального угла αn ориентации горизонтальной проекции нормали к плоскости ЭП относительно оси Y и угла выхода βn отклонения нормали к плоскости ЭП от горизонтальной плоскости XOY (см. фиг. 3).
Подобно зависимостям (1) и (2) получаем:
sin2βn= K
Для характеристики эллиптичности поля используют коэффициент эллиптичности Kэл=b/a или противоположную ей величину N - направленность сигнала N= 1-b/а. Обе эти величины легко находятся, если известны сигналы ω2a2,ω2b2, измеренные заявляемым способом.
Новизна заявляемого способа заключается в том, что сигналы компонент Ax(t), Ay(t), Az(t) подвергают двойному дифференцированию, затем формируют группу из трех однокомпонентных сигналов ηi, для чего перемножают сигнал каждой ортогональной компоненты на ее дважды продифференцированный сигнал и вычитают этот сигнал произведения из сигнала квадратично усиленной продифференцированной компоненты, кроме того, выделяют группу из трех двухкомпонентных ηij сигналов, для чего парно перемножают сигналы продифференцированных компонент, перемножают сигнал одной из компонент пары на сигнал другой, подвергнутый двойному дифференцированию, вычитают полученный сигнал произведения из сигнала парного произведения одноименных продифференцированных компонент и квадратично усиливают полученные сигналы разности, далее выделяют три смешанных сигнала Сij, для чего парно перемножают однокомпонентные сигналы и вычитают из сигнала каждой пары двухкомпонентный сигнал, составленный из тех же компонент, что и парное произведение однокомпонентных сигналов, затем суммируют смешанные сигналы, масштабно усиливают в четыре раза сигнал этой суммы, суммируют однокомпонентные сигналы и квадратично усиливают сигнал этой суммы, вычитают промасштабированный сигнал из сигнала квадратично усиленной суммы однокомпонентных сигналов, деформируют полученный сигнал разности по обратной квадратичной зависимости, суммируют деформированный сигнал с сигналом суммы однокомпонентных сигналов и одновременно вычитают деформированный сигнал из сигнала суммы однокомпонентных сигналов, затем ослабляют в два раза полученные сигналы суммы и разности, получая в результате два сигнала ω2a2,ω2b2, пропорциональные в квадратичной зависимости текущим произведениям большой и малой полуоси эллипса поляризации на круговую частоту, одновременно для получения сигналов Kni2, пропорциональных квадратичной зависимости текущим значениям направляющих косинусов нормали к плоскости эллипса поляризации, сравнивают посредством деления каждый смешанный сигнал с сигналом суммы смешанных сигналов, одновременно для получения сигналов Кai2, пропорциональных в квадратичной зависимости текущим значениям направляющих косинусов большой полуоси ЭП, делят каждый смешанный сигнал на сигнал, пропорциональный большой полуоси ЭП, затем суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, относительно оси которой находят направляющий косинус и которая не входит в состав смешанного сигнала, составляющего сигнал отношения, после чего из полученного сигнала суммы вычитают сигнал, пропорциональный малой полуоси ЭП, и делят на деформированный сигнал, одновременно для получения сигналов Кbi2, пропорциональных в квадратичной зависимости текущим значениям направляющих косинусов малой полуоси ЭП, делят каждый смешанный сигнал на сигнал, пропорциональный малой полуоси ЭП, затем суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, которая не входит в состав смешанного сигнала, затем из сигнала, пропорционального большой полуоси ЭП, вычитают сигнал полученной суммы и делят на деформированный сигнал. При изучении других известных технических решений в данной области технические признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и, следовательно, обеспечивают заявляемому решению соответствие критерию "существенные отличия".
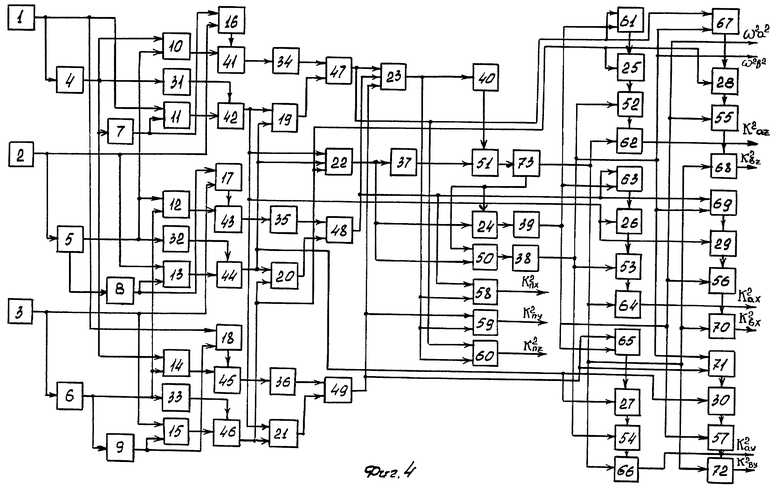
Пример реализации заявляемого способа поясняется на фиг. 4.
Устройство содержит три взаимноортогональных датчика 1, 2, 3, шесть дифференцирующих устройств 4. ..9, двенадцать умножителей 10....21, девять сумматоров 22. . .30, семь квадратичных усилителей 31... 37, три масштабных усилителя (38, 39 с коэффициентом 0,5 и 40 с коэффициентом 4), семнадцать вычитающих устройств 41. . . 57, пятнадцать делителей 58...72 и устройство преобразования сигнала по обратной квадратичной зависимости 73.
Блоки в устройстве соединены следующим образом. Выход датчика 1 соединен со входами дифференциатора 4 и умножителей 11, 18. Выход датчика 2 соединен со входами дифференциатора 5 и умножителей 13, 16. Выход датчика 3 соединен со входами дифференциатора 6 и умножителей 15, 17. Выход дифференциатора 4 подключен ко входам дифференциатора 7, умножителей 10, 14 и квадратичного усилителя 31. Выход дифференциатора 5 подключен ко входам дифференциатора 8, умножителей 10,12 и квадратичного усилителя 32. Выход дифференциатора 6 подключен ко входам дифференциатора 9, умножителей 12, 14 и квадратичного усилителя 33. Выход дифференциатора 7 подключен ко входам умножителей 11 и 16, выход дифференциатора 8 - ко входам умножителей 13 и 17, выход дифференциатора 9 - ко входам умножителей 15 и 18.
Выходы умножителей 16, 17, 18 подключены к первым входам (уменьшаемым) вычитающих устройств 41, 43, 45 соответственно, а выходы умножителей 10, 12, 14 - ко вторым входам (вычитаемым) указанных вычитающих устройств соответственно. Выходы квадратичных усилителей 31, 32, 33 подключены к первым входам вычитающих устройств 42, 44, 46 соответственно. Выходы умножителей 11, 13, 15 подключены ко вторым входам устройств 42, 44, 46 соответственно.
Выходы вычитающих устройств 41, 43, 45 подключены ко входам квадратичных усилителей 34, 35, 36 соответственно. Выход вычитающего устройства 42 соединен со входами сумматоров 22, 26, 29 и умножителей 19, 21. Выход вычитающего устройства 44 соединен со входами сумматоров 22, 27, 30 и умножителей 19, 20. Выход вычитающего устройства 46 соединен со входами сумматоров 22, 25, 28 и умножителей 20, 21.
Выходы квадратичных усилителей 34, 35, 36 подключены ко вторым входам вычитающих устройств 47, 48, 49 соответственно, а выходы умножителей 19, 20, 21 подключены к первым входам указанных вычитающих устройств соответственно. Выход вычитающего устройства 47 соединен со входом сумматора 23 и первыми входами (делимыми) делителей 60, 61, 67. Выход вычитающего устройства 48 соединен со входом сумматора 23 и первыми входами делителей 58, 63, 69. Выход вычитающего устройства 49 соединен со входом сумматора 23 и первыми входами делителей 59, 65, 71.
Выход сумматора 23 подключен ко входу масштабного усилителя 40 с коэффициентом 4 и ко вторым входам (делительным) делителей 58, 59, 60. Выход сумматора 22 подключен ко входу квадратичного усилителя 37, первому входу вычитающего устройства 50 и входу сумматора 24. Выход квадратичного усилителя 37 подключен к первому входу вычитающего устройства 51, выход масштабного усилителя 40 - ко второму входу устройства 51. Выход вычитающего устройства 51 соединен со входом устройства преобразования по обратной квадратичной зависимости 73, выход которого в свою очередь подключен ко входу сумматора 24, второму входу вычитающего устройства 50 и вторым входам делителей 62, 64, 66, 68, 70, 72.
Выход сумматора 24 подключен ко входу масштабного усилителя 39, выход которого соединен со вторыми входами делителей 61, 63, 65 и первыми входами вычитающих устройств 55, 56, 57. Выход вычитающего устройства 50 подключен ко входу масштабного усилителя 38 с коэффициентом 0,5, выход которого соединен со вторыми входами делителей 67, 69, 71 и вторыми входами вычитающих устройств 52, 53, 54.
Выходы делителей 61, 63, 65, 67, 69, 71 подключены ко входам сумматоров 25, 26, 27, 28, 29, 30 соответственно. Выходы сумматоров 25, 26, 27 подключены к первым входам вычитающих устройств 52, 53, 54, а сумматоров 28, 29, 30 - к вторым входам вычитающих устройств 55, 56, 57 соответственно. Выходы вычитающих устройств 52, 53, 54, 55, 56, 57 подключены к первым входам делителей 62, 64, 66, 68, 70, 72 соответственно.
Принцип работы устройства заключается в следующем. Механические,
электромагнитные или возмущения иной природы преобразуются тремя ортогональными датчиками 1...3 в сигналы Ax, Ay, Az, которые с выходов датчиков поступают на входы дифференцирующих устройств 4...6 для получения первых производных сигнала  а также на входы перемножителей 11, 13, 15 и 16, 17, 18 для получения сигналов произведений со вторыми производными сигналов Äx,Äy,Äz. С выходов дифференцирующих устройств 4...6 сигналы первых производных
а также на входы перемножителей 11, 13, 15 и 16, 17, 18 для получения сигналов произведений со вторыми производными сигналов Äx,Äy,Äz. С выходов дифференцирующих устройств 4...6 сигналы первых производных  поступают на входы дифференцирующих устройств 7...9 для получения вторых производных сигналов Äx,Äy,Äz на входы устройств 10, 12, 14 и 31, 32, 33, осуществляющих их попарное перемножение и квадратичное усиление.
поступают на входы дифференцирующих устройств 7...9 для получения вторых производных сигналов Äx,Äy,Äz на входы устройств 10, 12, 14 и 31, 32, 33, осуществляющих их попарное перемножение и квадратичное усиление.
Получение однокомпонентных сигналов ηx,ηy,ηz производится вычитающими устройствами 42, 44, 46 путем нахождения разности сигналов квадратично усиленных первых производных  соответствующими произведениями сигналов Ax, Ay, Az с их вторыми производными. Выделенные сигналы с выходов устройств 42, 44, 46 поступают на вход сумматора 22 и перемножителей 19, 20, 21, осуществляющих их попарное перемножение. Двухкомпонентные сигналы ηxy,ηxz,ηyz получают на выходе устройств 34, 35, 36, квадратично усиливая сигнал разности произведения ÄxAy,ÄzAx,ÄyAz. и попарно перемноженных сигналов их первых производных
соответствующими произведениями сигналов Ax, Ay, Az с их вторыми производными. Выделенные сигналы с выходов устройств 42, 44, 46 поступают на вход сумматора 22 и перемножителей 19, 20, 21, осуществляющих их попарное перемножение. Двухкомпонентные сигналы ηxy,ηxz,ηyz получают на выходе устройств 34, 35, 36, квадратично усиливая сигнал разности произведения ÄxAy,ÄzAx,ÄyAz. и попарно перемноженных сигналов их первых производных  .
.
Выделение смешанных сигналов Cxy, Cxz, Cyz производится в устройствах 47, 48, 49 путем вычитания из поступающих на их входы попарно перемноженных однокомпонентных сигналов ηiηj двухкомпонентных сигналов ηij, составленных из тех же компонент, что парное произведение. С выходов устройств 47, 48, 49 смешанные сигналы поступают на вход сумматора 23, соединенного выходом с масштабирующим усилителем 40, осуществляющим четырехкратное усиление суммы смешанных сигналов. В вычитающем устройстве 51 производится получение сигнала разности квадратично усиленной суммы однокомпонентных сигналов и четырехкратно усиленной суммы смешанных сигналов, который затем и преобразуется по обратной квадратичной зависимости устройством 73 в деформированный сигнал D.
Сигнал ω2a2, пропорциональный большой полуоси ЭП, выделяют на выходе масштабирующего усилителя 39 с коэффициентом 0,5, преобразующего сигнал сумматора 24. Сигнал ω2b2, пропорциональный малой полуоси ЭП, получают на выходе масштабирующего усилителя 38 с коэффициентом 0,5, преобразующего сигнал вычитающего устройства 50.
Сигналы Knx2, Kny2, Knz2, пропорциональные направляющим косинусам нормали ЭП, получают на выходе устройств 58, 59, 60, осуществляющих деление одного из смешанных сигналов на сигнал их суммы.
Сигналы Kax2, Kay2, Kaz2, пропорциональные направляющим косинусам большой полуоси, получают в четырех последовательно соединенных блоках 61, 25, 52, 62; 63, 26, 53, 64 и 65, 27, 54, 66. Для этого в блоках 61, 63, 65 осуществляют деление одного из смешанных сигналов, поступающих с устройств 47, 48, 49 на сигнал, пропорциональный большой полуоси ЭП. Затем полученный сигнал отношения поступает на вход сумматоров 25, 26, 27, где к нему добавляется однокомпонентный сигнал, не входящий в сигнал отношения. В последующем из сигналов суммы вычитают в устройствах 52, 53, 54 сигнал, пропорциональный малой полуоси ЭП. Сигналы Kax2, Kay2, Kaz2, пропорциональные направляющим косинусам большой полуоси, получают на выходе блоков 62, 64, 66, осуществляющих деление сигналов с выходов блоков 52, 53, 54 на деформированный сигнал D, снимаемый с блока 73.
Сигналы Kbx2, Kby2, Kbz2 пропорциональные направляющим косинусам малой полуоси ЭП, получают в четырех последовательно соединенных блоках 67, 28, 55, 68; 69, 29, 56, 70 и 71, 30, 57, 72. Для этого в блоках 67, 69, 71 осуществляют деление одного из смешанных сигналов, поступающих с устройств 47, 48, 49, на сигнал, пропорциональный малой полуоси ЭП. Затем полученный сигнал отношения поступает на вход сумматоров 28, 29, 30, где к нему добавляется однокомпонентный сигнал, не входящий в сигнал отношения. В последующем из сигнала, пропорционального большой полуоси, в блоках 55, 56, 57 вычитают сигнал суммы с выхода блоков 28, 29, 30. Сигналы Kbx2, Kby2, Kbz2, пропорциональные направляющим косинусам малой полуоси, получают на выходе блоков 68, 70, 72, осуществляющих деление сигналов с выходов блоков 55, 56, 57 на деформированный сигнал D, снимаемый с блока 73.
Все элементы для осуществления указанных блоков являются известными, что позволяет способ легко реализовать. Использование заявленного способа позволяет неограниченно повысить разрешающую способность поляризационных измерений, так как результатом его применения является получение непосредственно текущих значений полуосей ЭП.
Кроме того, он не требует знания частоты принимаемого сигнала ω и позволяет определить текущие значения угловых величин, задающих положение ЭП и его полуосей.
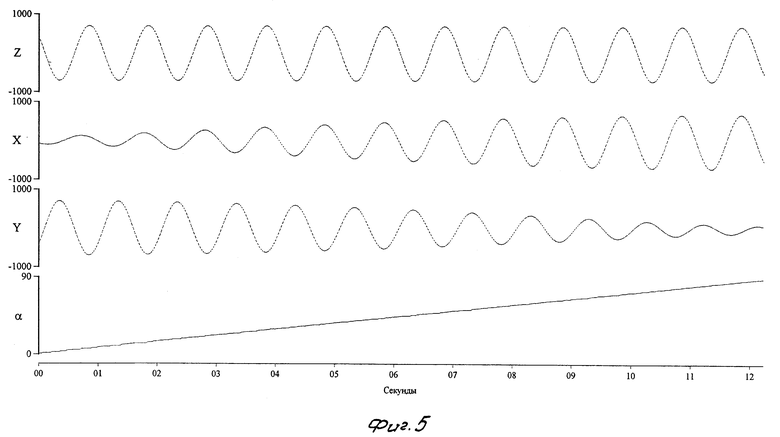
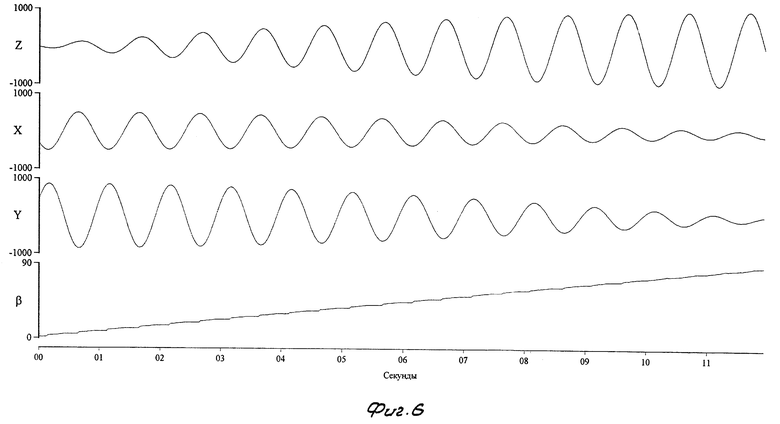
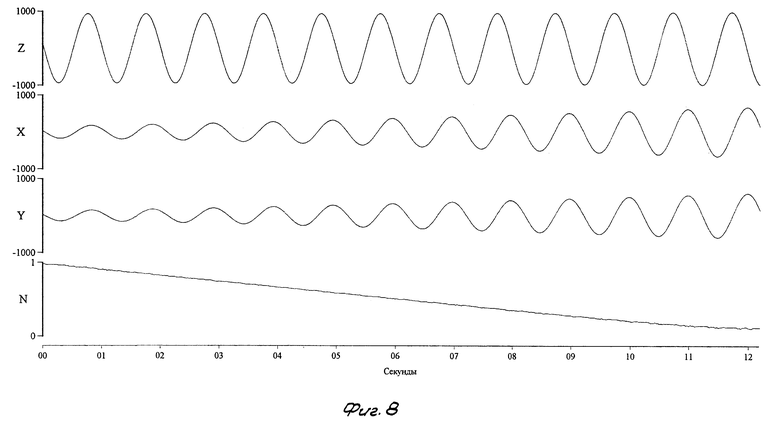
На фиг. 5...8 представлены примеры обработки заявленным способом модельных сигналов с линейно изменяемыми параметрами поляризации азимутальным углом α, углом выхода β, азимутальным углом αn нормали к плоскости ЭП, направленностью N. В нижней части фигур представлены результаты обработки. Как следует из фигур заявляемый способ действительно позволяет проводить текущие измерения всех поляризационных параметров.
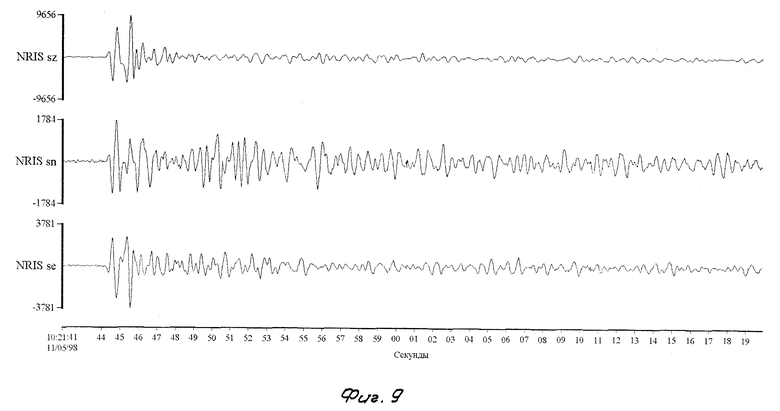
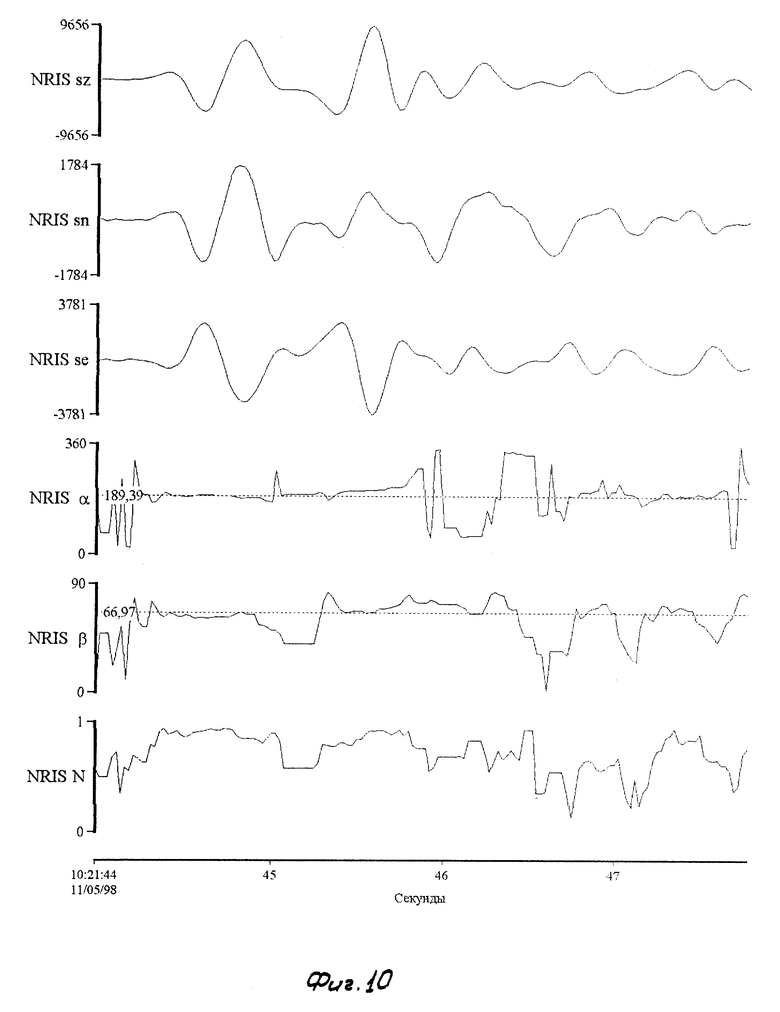
На фиг. 9 дана трехкомпонентная запись индийского подземного ядерного испытания, проведенного 11.05.98 и зарегистрированного сейсмической лабораторией Норильск (NRIS). На записи отчетливо прописана фаза Р-волны. На фиг. 10 в нижней части представлены результаты измерения текущих значений азимутального угла α угла выхода β и направленности волны N посредством использования заявляемого способа. Пунктиром выделены реальные значения углов. Как следует из фиг. 10, при приходе полезного сигнала хаотические флуктуации всех поляризационных параметров прекращаются и текущие измеренные их величины стабильно отражают направление прихода и степень линейности сейсмической волны. Вступление Р-волны, в частности, характеризуется направленностью, близкой к единице (коэффициент эллиптичности близок к нулю). Дальнейшие флуктуации измеренных параметров очевидно обусловлены фазами Р-волн, связанными с переотражениями сейсмической волны на различных слоях земной коры. Они, видимо, также могут служить для исследования внутреннего строения коры.
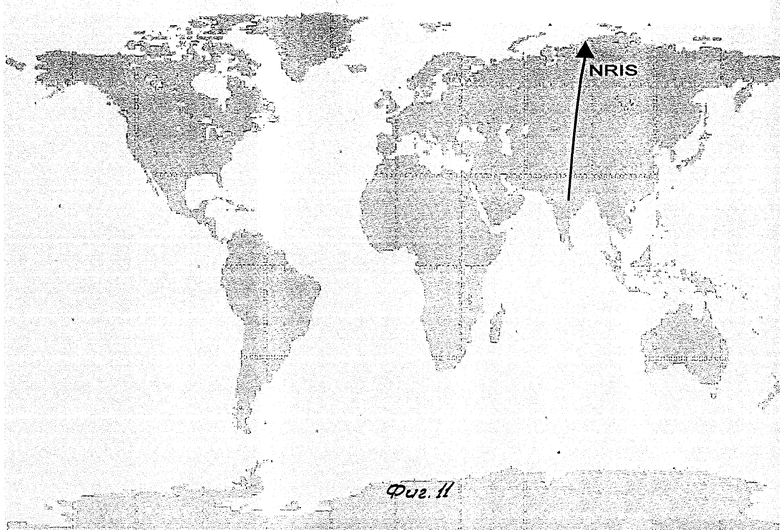
На фиг. 11 представлены результаты сейсмического пеленгования индийского ядерного испытания по измеренному азимутальному углу α с помощью заявляемого способа. Как следует из фиг. 11, линия пеленга проходит через индийский ядерный полигон.
Таким образом, заявляемый способ реализует заявленные цели и позволяет измерить непосредственно текущие значения всех поляризационных параметров - значений полуосей ЭП, ориентацию в пространстве плоскости ЭП и ориентацию полуосей ЭП с практически неограниченным временным разрешением. Способ применим к векторным сигналам любой природы. Использование способа позволит решить различные задачи по определению параметров излучателей сигналов и сред их распространения. Особенно эффективно его использование для пеленгования излучателей, в том числе и для решения задач трехмерной радиопеленгации, например в космосе.
Литература:
1. Williams J.L., "Jour. of Atm. and Terr. Phys., vol. 28, 1966, N 2, p. 199.
2. Ефремов Е.Ф. Устройство измерения эллиптически поляризованного поля. Авторское свидетельство 398009, 1978.
3. Пасечник И.П. Характеристика сейсмических волн при ядерных взрывах и землетрясениях. М.: Наука, 1970.
ПРИЛОЖЕНИЕ 1 к заявляемому изобретению "СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛЯРИЗАЦИИ ВЕКТОРНОГО СИГНАЛА"
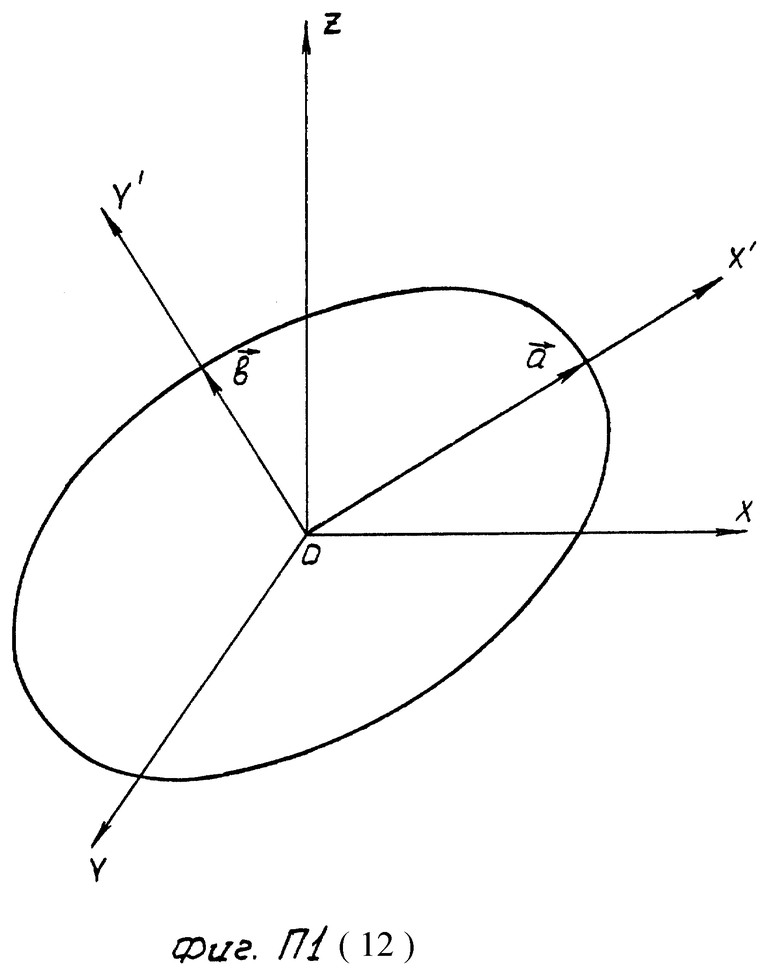
Зададим эллипс поляризации (ЭП) векторного сигнала любой природы в параметрической форме (см. например [П1] стр.240):
где A'x(t), A'y(t) - составляющие в системе координат X'OY', повернутой относительно системы приемных датчиков OXYZ так, чтобы направления ОХ' и OY' совпали с направлением большой полуоси а и малой полуоси b в ЭП (см. фиг. П1 (12)).
Измеренные ортогональными датчиками компоненты сигнала тогда запишутся через параметры ЭП в виде:
где ai=aKai - проекция большой полуоси ЭП на i-ю ось;
bi=bKbi - проекция малой полуоси ЭП на i-ю ось;
Kai, Kbi - направляющие косинусы большой и малой полуосей ЭП относительно осей координат.
Формируем группу однокомпонентных сигналов:
Для этого найдем первую и вторую производные компонент вектора сигнала:
Подставив значения производных (4) в выражение (3), получим:
ηi= ω2(a
Формируем группу двухкомпонентных сигналов:
Формируем группу смешанных сигналов:
Cij= ηiηj-ηij= ω4(aibj-ajbi)2 (7)
Из выражений (5), (6), (7) следуют равенства:
ΣCij= ω4a2b2; (9)


С целью нахождения направляющих косинусов большой и малой полуосей ЭП составим систему из шести уравнений с шестью неизвестными:
Решением системы (13) являются:
Направляющие косинусы нормали Kni найдем из правила определения векторного произведения двух векторов, заданных своими координатами для единичных ортов системы X'OY', которые совпадают по направлению с полуосями ЭП, записываем: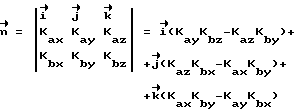
где  - орты системы координат OXYZ.
- орты системы координат OXYZ.
По определению векторного произведения вектор  ортогонален осям ОХ' и QY', то есть определяет положение нормали к плоскости ЭП. Поскольку мы рассматриваем произведение двух пространственно-ортогональных единичных векторов, то модуль
ортогонален осям ОХ' и QY', то есть определяет положение нормали к плоскости ЭП. Поскольку мы рассматриваем произведение двух пространственно-ортогональных единичных векторов, то модуль  равен 1, и разности, стоящие в выражении (7), есть направляющие косинусы Kni нормали
равен 1, и разности, стоящие в выражении (7), есть направляющие косинусы Kni нормали  Чтобы их измерить нужно разделить смешанные сигналы (7) на их сумму (9):
Чтобы их измерить нужно разделить смешанные сигналы (7) на их сумму (9):
что и требовалось доказать.
ЛИТЕРАТУРА:
П1. Бронштейн И. Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ. М.: Наука, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ СЕЛЕКЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН С ПОСЛЕДУЮЩЕЙ ПОЛЯРИЗАЦИОННОЙ ОБРАБОТКОЙ СИГНАЛОВ | 2018 |
|
RU2720588C1 |
| МАГНИТООПТИЧЕСКИЙ ОРИЕНТАТОР | 2000 |
|
RU2167395C1 |
| СИНТЕЗАТОР ЧАСТОТЫ | 2002 |
|
RU2237972C2 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АНТЕННОЙ РЕШЕТКОЙ ИДЕНТИЧНО ОРИЕНТИРОВАННЫХ ВЕКТОРНЫХ ИЗЛУЧАТЕЛЕЙ | 2006 |
|
RU2330356C1 |
| АДАПТИВНОЕ РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО | 2000 |
|
RU2210806C2 |
| СИСТЕМА РАСПРЕДЕЛЕНИЯ РЕАКТИВНЫХ НАГРУЗОК | 2003 |
|
RU2319131C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ СВЯЗИ | 1999 |
|
RU2210812C2 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ МАТРИЦЫ НАПРАВЛЯЮЩИХ КОСИНУСОВ | 1991 |
|
RU2037192C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПРОИЗВОЛЬНО ПОЛЯРИЗОВАННЫХ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2005 |
|
RU2301483C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ СВЯЗИ | 2000 |
|
RU2210811C2 |

Использование: в системах радиолокации, обнаружения излучателя, сейсмометрии, навигации, радиосвязи с пеленгационной модуляцией и др. Сущность изобретения: выделяют пространственно ортогональные компоненты вектора сигнала. Однократно и двухкратно их дифференцируют. Далее формируют группы однокомпонентных сигналов и группы двухкомпонентных сигналов. Используя полученные производные компонент, формируют группы смешанных сигналов путем вычитания из парного произведения однокомпонентных сигналов двухкомпонентного, составленного из тех же компонент, что и парное произведение. Получают квадратично усиленную сумму однокомпонентных сигналов и вычитают из нее четырехкратно усиленную сумму смешанных сигналов, деформируя затем полученный сигнал по обратной квадратичной зависимости. Сигналы, пропорциональные большой и малой полуоси эллипса поляризации, выделяют путем нахождения ослабленных в два раза суммы и разности деформированного сигнала и суммы однокомпонентных сигналов. Получают сигналы, пропорциональные в квадратичной зависимости направляющим косинусам нормали к плоскости эллипса поляризации и его полуосей. Технический результат: повышение разрешающей способности измерений. 12 ил.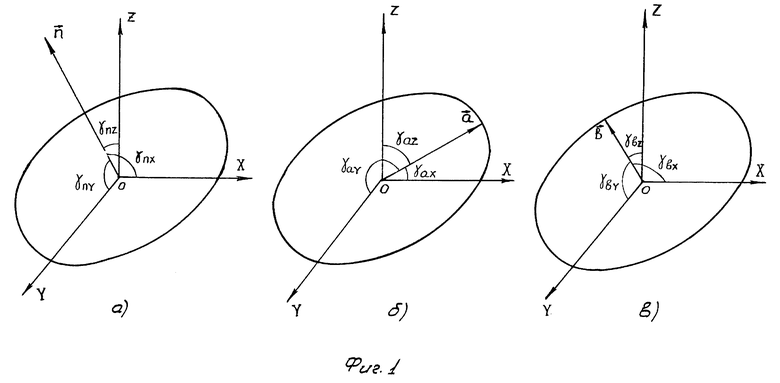
Способ измерения параметров поляризации векторного сигнала, основанный на приеме ортогональных компонент вектора сигнала, их однократном дифференцировании и квадратичном усилении сигнала производной, отличающийся тем, что сигналы компонент подвергают двойному дифференцированию, затем формируют группу из трех однокомпонентных сигналов, для чего перемножают сигнал каждой ортогональной компоненты на ее дважды продифференцированный сигнал и вычитают этот сигнал произведения из сигнала квадратично усиленной продифференцированной компоненты, кроме того, выделяют группу из трех двухкомпонентных сигналов, для чего парно перемножают сигналы продифференцированных компонент, перемножают сигнал одной из компонент пары на сигнал другой, подвергнутый двойному дифференцированию, вычитают полученный сигнал произведения из сигнала парного произведения одноименных продифференцированных компонент и квадратично усиливают полученные сигналы разности, далее выделяют три смешанных сигнала, для чего парно перемножают однокомпонентные сигналы и вычитают из сигнала каждой пары двухкомпонентный сигнал, составленный из тех же компонент, что и парное произведение однокомпонентных сигналов, затем суммируют смешанные сигналы, масштабно усиливают в четыре раза сигнал этой суммы, суммируют однокомпонентные сигналы и квадратично усиливают сигнал этой суммы, вычитают промасштабированный сигнал из сигнала квадратично усиленной суммы однокомпонентных сигналов, деформируют полученный сигнал разности по обратной квадратичной зависимости, суммируют деформированный сигнал с суммой однокомпонентных сигналов и одновременно вычитают деформированный сигнал из суммы однокомпонентных сигналов, затем ослабляют в два раза полученные сигналы суммы и разности, получая в результате два сигнала, пропорциональные в квадратичной зависимости текущим произведениям большой и малой полуоси эллипса поляризации на круговую частоту, одновременно сравнивают посредством деления каждый смешанный сигнал с сигналом суммы смешанных сигналов, получая в результате три сигнала, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов нормали к плоскости эллипса поляризации, затем делят каждый смешанный сигнал на сигнал, пропорциональный большой полуоси эллипса поляризации, и суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, которая не входит в состав смешанного сигнала, составляющего сигнал отношения, после чего из полученного сигнала суммы вычитают сигнал, пропорциональный малой полуоси эллипса поляризации, и делят на деформированный сигнал, получая в результате три сигнала, пропорциональных в квадратичной зависимости текущим значениям направляющих косинусов большой полуоси эллипса поляризации, одновременно делят каждый смешанный сигнал на сигнал, пропорциональной малой полуоси эллипса поляризации, затем суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, которая не входит в состав смешанного сигнала, затем из сигнала, пропорционального большой полуоси эллипса поляризации, вычитают сигнал полученной суммы и делят на деформированный сигнал, получая в результате три сигнала, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов малой полуоси эллипса поляризации.
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 1992 |
|
RU2018882C1 |
| US 4464737 A, 07.08.1984 | |||
| US 4905204 A, 27.02.1990 | |||
| 0 |
|
SU154396A1 | |
| Шланговое соединение | 0 |
|
SU88A1 |
