Изобретение относится к области радиотехники, в частности к способам измерения параметров поляризации и направления прихода электромагнитной волны, и может найти применение при обработке радиосигналов в многоканальных радиоприемных трактах для измерения пространственно-поляризационных параметров и деполяризации электромагнитных волн [G01S 3/02, G01S 3/08].
Из уровня техники известен СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ШИРОКОПОЛОСНЫХ РАДИОСИГНАЛОВ [RU 2410707 С1, опубл. 27.01.2011 г.], заключающийся в том, что принимают радиосигналы N вертикально поляризованными антеннами в заданной полосе частот, синхронно преобразуют ансамбль принятых сигналов в цифровые сигналы, из цифровых сигналов на каждой i-й частоте полосы приема формируют сигнал вертикально поляризованной компоненты комплексного амплитудно-фазового распределения (АФР), отличающийся тем, что дополнительно принимают радиосигналы N горизонтально поляризованными антеннами, синхронно преобразуют ансамбль принятых сигналов в цифровые сигналы, из которых на каждой I-й частоте полосы приема формируют сигнал горизонтально поляризованной компоненты комплексного АФР, объединяют сигналы вертикально поляризованной и горизонтально поляризованной компонент в сигнал двухкомпонентного комплексного АФР, по сигналам двухкомпонентного комплексного АФР выполняют обнаружение и частотно-пространственную локализацию радиосигналов, при этом обнаружение и частотную локализацию радиосигналов осуществляют путем формирования квадратов модулей комплексных коэффициентов взаимной корреляции сигнала двухкомпонентного комплексного АФР на частоте I с сигналом двухкомпонентного АФР на всех остальных частотах I' полосы приема, сравнивают квадраты модулей коэффициентов взаимной корреляции К(I,I') с порогом, радиосигналы с частотами, на которых превышен порог, объединяют в сигнал, который идентифицируют как i-й обнаруженный радиосигнал, принадлежащий одному передатчику, и фиксируют полосу частот его локализации, а пространственную локализацию радиосигналов осуществляют путем формирования сигнала двухкомпонентного комплексного АФР(i) i-го обнаруженного радиосигнала, преобразования сигнала двухкомпонентного АФР(i) в двумерный комплексный угловой спектр и определения по угловому спектру азимута и угла места передатчика i-го обнаруженного радиосигнала.
Недостатком данного аналога является невысокая точность определения азимута и угла места передатчика i-го обнаруженного радиосигнала, обусловленная высокой сложностью согласования характеристик 2*Nантенных элементов и их антенно-фидерных устройств, кроме того к недостатку данного аналога можно отнести ограниченные возможности по применению данного способа на местах из-за необходимости обеспечения заданной пространственной топологии групп Nвертикально и Nгоризонтально поляризованных антенных элементов.
Также из уровня техники известен СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛЯРИЗАЦИИ ВЕКТОРНОГО СИГНАЛА [RU 2168744 C2, опубл. 10.06.2001 г.], основанный на приеме ортогональных компонент вектора сигнала, их однократном дифференцировании и квадратичном усилении сигнала производной, отличающийся тем, что сигналы компонент подвергают двойному дифференцированию, затем формируют группу из трех однокомпонентных сигналов, для чего перемножают сигнал каждой ортогональной компоненты на ее дважды продифференцированный сигнал и вычитают этот сигнал произведения из сигнала квадратично усиленной продифференцированной компоненты, кроме того, выделяют группу из трех двухкомпонентных сигналов, для чего парно перемножают сигналы продифференцированных компонент, перемножают сигнал одной из компонент пары на сигнал другой, подвергнутый двойному дифференцированию, вычитают полученный сигнал произведения из сигнала парного произведения одноименных продифференцированных компонент и квадратично усиливают полученные сигналы разности, далее выделяют три смешанных сигнала, для чего парно перемножают однокомпонентные сигналы и вычитают из сигнала каждой пары двухкомпонентный сигнал, составленный из тех же компонент, что и парное произведение однокомпонентных сигналов, затем суммируют смешанные сигналы, масштабно усиливают в четыре раза сигнал этой суммы, суммируют однокомпонентные сигналы и квадратично усиливают сигнал этой суммы, вычитают промасштабированный сигнал из сигнала квадратично усиленной суммы однокомпонентных сигналов, деформируют полученный сигнал разности по обратной квадратичной зависимости, суммируют деформированный сигнал с суммой однокомпонентных сигналов и одновременно вычитают деформированный сигнал из суммы однокомпонентных сигналов, затем ослабляют в два раза полученные сигналы суммы и разности, получая в результате два сигнала, пропорциональные в квадратичной зависимости текущим произведениям большой и малой полуоси эллипса поляризации на круговую частоту, одновременно сравнивают посредством деления каждый смешанный сигнал с сигналом суммы смешанных сигналов, получая в результате три сигнала, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов нормали к плоскости эллипса поляризации, затем делят каждый смешанный сигнал на сигнал, пропорциональный большой полуоси эллипса поляризации, и суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, которая не входит в состав смешанного сигнала, составляющего сигнал отношения, после чего из полученного сигнала суммы вычитают сигнал, пропорциональный малой полуоси эллипса поляризации, и делят на деформированный сигнал, получая в результате три сигнала, пропорциональных в квадратичной зависимости текущим значениям направляющих косинусов большой полуоси эллипса поляризации, одновременно делят каждый смешанный сигнал на сигнал, пропорциональной малой полуоси эллипса поляризации, затем суммируют каждый полученный сигнал отношения с однокомпонентным сигналом той компоненты, которая не входит в состав смешанного сигнала, затем из сигнала, пропорционального большой полуоси эллипса поляризации, вычитают сигнал полученной суммы и делят на деформированный сигнал, получая в результате три сигнала, пропорциональные в квадратичной зависимости текущим значениям направляющих косинусов малой полуоси эллипса поляризации.
Недостатком данного аналога является применение двукратного дифференцирования ортогональных компонент вектора сигнала с последующем усилением, что значительно снижает точность определения угловых координат прихода сигнала.
Наиболее близким по технической сущности является СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ [RU 2624449 C1, опубл. 04.07.2017 г.], заключающийся в том, что принимают аналоговый радиосигнал неизвестной поляризации многоэлементной антенной системой (MAC) и формируют совокупность аналоговых радиосигналов, зависящих от времени и номера антенного элемента MAC, на который они приняты, синхронно преобразуют совокупность принятых аналоговых радиосигналов в цифровые сигналы, которые затем преобразуют в комплексное амплитудно-фазовое распределение (КАФР), описывающее распределение амплитуд и фаз принятого радиосигнала на элементах MAC, запоминают преобразованное КАФР, после чего рассчитывают азимут θ и угол места β на источник радиоизлучения, отличающийся тем, что в качестве MAC используют триортогональную антенную систему (ТОАС), а для расчета углов θ и β предварительно в моменты времени t1 и t2 измеряют с помощью ТОАС ортогональные компоненты Ex1, Ey1, Ez1 и Ех2, Еу2, Ez2 векторов напряженности электрического поля Е1 и Е2 принятого аналогового радиосигнала и определяют их ориентацию в пространстве путем векторного сложения соответствующих им измеренных ортогональных компонент Ex1, Ey1, Ez1 и Ех2, Еу2, Ez2, запоминают ориентацию векторов Е1 и Е2 принятого аналогового радиосигнала в моменты времени t1 и t2, после чего измеряют значения азимута θ и угла места β, определяемые линией пересечения плоскостей Ω1 и Ω2, проходящих через центр ТОАС и к которым перпендикулярны соответствующие векторы Е1 и Е2.
Основной технической проблемой прототипа является необходимость измерения и запоминания ортогональных компонент Ex1, Ey1, Ez1 и Ех2, Еу2, Ez2 векторов напряженности электромагнитного поля в моменты времени t1 и t2 для вычисления азимута θ и угла места β источника электромагнитной волны, при этом точность определения данных параметров зависит от выбора периода дискретизации между моментами времени t1 и t2, оптимальное значение которого зависит от поляризационных характеристик и спектра электромагнитных волн. Таким образом, использование фиксированного значения периода дискретизации между моментами времени t1 и t2 снижает точность определения угловых координат прихода электромагнитных волн с разными поляризационными характеристиками и спектрами.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение энергетической доступности источника электромагнитных волн, обеспечение пространственно-поляризационной согласованности антенно-приемного тракта, повышение точности определения направления прихода электромагнитной волны.
Указанный технический результат изобретения достигается за счет того, что способ пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов, характеризующийся тем, что принимают ортогональные компоненты электромагнитного поля, преобразуют их в цифровые сигналы, и затем вычисляют значения азимута и угла места прихода электромагнитной волны, отличающийся тем, что задают и сохраняют диапазоны азимута ϕн≤ϕ≤ϕв и угла места θн≤θ≤θв прихода электромагнитной волны и антенными элементами X, Y и Z триортогональной антенны начинают принимать ортогональные компоненты электромагнитного поля 

 где
где  - действующая длина антенного элемента, Emx, Emy, Emz - амплитуды и ϕx, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции, после чего последовательно для каждого канала фильтруют, усиливают, оцифровывают, осуществляют квадратурное преобразование входных сигналов и переводят их в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты
- действующая длина антенного элемента, Emx, Emy, Emz - амплитуды и ϕx, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции, после чего последовательно для каждого канала фильтруют, усиливают, оцифровывают, осуществляют квадратурное преобразование входных сигналов и переводят их в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты 
 и
и  где Um - амплитуда на выходе соответствующего квадратурного преобразователя,
где Um - амплитуда на выходе соответствующего квадратурного преобразователя,  комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей, затем комплексные компоненты передают в блок определения вектора нормали
комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей, затем комплексные компоненты передают в блок определения вектора нормали  к плоскости поляризации, в котором вычисляют его компоненты [x, y, z] и затем передают их в блок определения угловых координат направления прихода электромагнитной волны, в котором вычисляют азимут ϕ по соотношению
к плоскости поляризации, в котором вычисляют его компоненты [x, y, z] и затем передают их в блок определения угловых координат направления прихода электромагнитной волны, в котором вычисляют азимут ϕ по соотношению  и угол места θ по соотношению
и угол места θ по соотношению  после чего, если вычисленные значения ϕ и θ попадают в заданные интервалы, тогда продолжают обработку входных сигналов и затем определяют угол собственного вращения ϕz (угол наклона большой оси эллипса)
после чего, если вычисленные значения ϕ и θ попадают в заданные интервалы, тогда продолжают обработку входных сигналов и затем определяют угол собственного вращения ϕz (угол наклона большой оси эллипса)  где
где 
 после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации,
после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации, 
 где
где  после этого определяют коэффициент эллиптичности
после этого определяют коэффициент эллиптичности  и
и  где
где 
 на завершающем этапе производят деполяризацию информационного (полезного) сигнала
на завершающем этапе производят деполяризацию информационного (полезного) сигнала 
 где
где 

В частности, ориентируют по сторонам света антенные элементы X, Y и Z таким образом, чтобы антенному элементу X соответствовало направление восток-запад, антенному элементу Y соответствовало направление север-юг и антенному элементу Z соответствовало вертикальное направление.
В частности, для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации формируют дополнительные комплексные вектора
к плоскости поляризации формируют дополнительные комплексные вектора  и
и  сдвинутые относительно вектора электромагнитного поля
сдвинутые относительно вектора электромагнитного поля  на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят
на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят 
 после чего вычисляют вектор нормали
после чего вычисляют вектор нормали  к плоскости поляризации по следующим соотношениям х=Sy(S1z-S2z)+Sz(S2y-S1y)+S1yS2z-S2yS1z, y=Sx(S2z-S1z)+Sz(S1x-S2x)+S2xS1z-S1xS2z, z=Sx(S1y-S2y)+Sy(S2x-S1x)+S1xS2y-S2xS1y.
к плоскости поляризации по следующим соотношениям х=Sy(S1z-S2z)+Sz(S2y-S1y)+S1yS2z-S2yS1z, y=Sx(S2z-S1z)+Sz(S1x-S2x)+S2xS1z-S1xS2z, z=Sx(S1y-S2y)+Sy(S2x-S1x)+S1xS2y-S2xS1y.
В частности, для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля
к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля 
 после чего из них формируют кватернионы с нулевой вещественной частью
после чего из них формируют кватернионы с нулевой вещественной частью 
 и перемножают их
и перемножают их  затем умножают получившийся кватернион на коэффициент
затем умножают получившийся кватернион на коэффициент  где
где  - модуль кватерниона,
- модуль кватерниона,  - аргумент (фаза) кватерниона и тем самым определяют компоненты вектора нормали к плоскости поляризации
- аргумент (фаза) кватерниона и тем самым определяют компоненты вектора нормали к плоскости поляризации 
В частности, отличающийся тем, что в пользовательский интерфейс передают и отображают значения азимута ϕ и угла места θ прихода электромагнитной волны, значение угла наклона большой оси эллипса ϕz, а также коэффициент эллиптичности Kэ и Δϕ.
В частности, в пользовательском интерфейсе значения отображают в виде графиков и/или диаграмм.
Указанный технический результат изобретения достигается за счет того, что устройство для пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов, содержащее идентичные антенные элементы, расположенные перпендикулярно друг относительно друга с возможностью приема ортогональных проекций электромагнитной волны, а также блок определения угловых координат прихода электромагнитной волны, отличающийся тем, что антенные элементы последовательно соединены с многоканальным фильтром, многоканальным усилителем, многоканальным квадратурным преобразователем и многоканальным блоком быстрого преобразования Фурье, выходы которого подключены к блоку определения угловых координат прихода ЭМВ, блоку вычисления угла наклона большой оси эллипса поляризации ϕz, при этом выходы блока определения угловых координат прихода ЭМВ подключены к блоку вычисления угла наклона большой оси эллипса поляризации ϕz, к пользовательскому интерфейсу и к блоку сравнения, управляющий выход которого подключен к блоку вычисления угла наклона большой оси эллипса поляризации ϕz, выходы которого подключены к блоку поворота плоскости поляризации, при этом выход «ϕz» также подключен к пользовательскому интерфейсу, выходы блока компенсации амплитудно-фазовых смещений подключены к блоку вычисления коэффициента эллиптичности и Δϕ, а также последовательно соединены с блоком преобразования комплексных сигналов, блоком деполяризации информационного сигнала и блоком демодуляции и декодирования сигнала, при этом выходы блока вычисления коэффициента эллиптичности и Δϕ подключены к блоку деполяризации информационного сигнала и к пользовательскому интерфейсу, к блоку сравнения подключен блок памяти, к которому подключен пользовательский интерфейс.
В частности, многоканальный квадратурный преобразователь включает многоканальный аналого-цифровой преобразователь, входы которого являются входами многоканального квадратурного преобразователя, каждый выход многоканального аналого-цифрового преобразователя подключен к паре умножителей, к одному из которых подключен выход cos, а к другому выход -sin гетеродина, при этом выходы умножителей последовательно соединены с многоканальным низкочастотным фильтром и дециматором, выходы которого являются выходами многоканального квадратурного преобразователя.
В частности, фазовые центры антенных элементов расположены в одной точке.
Краткое описание чертежей.
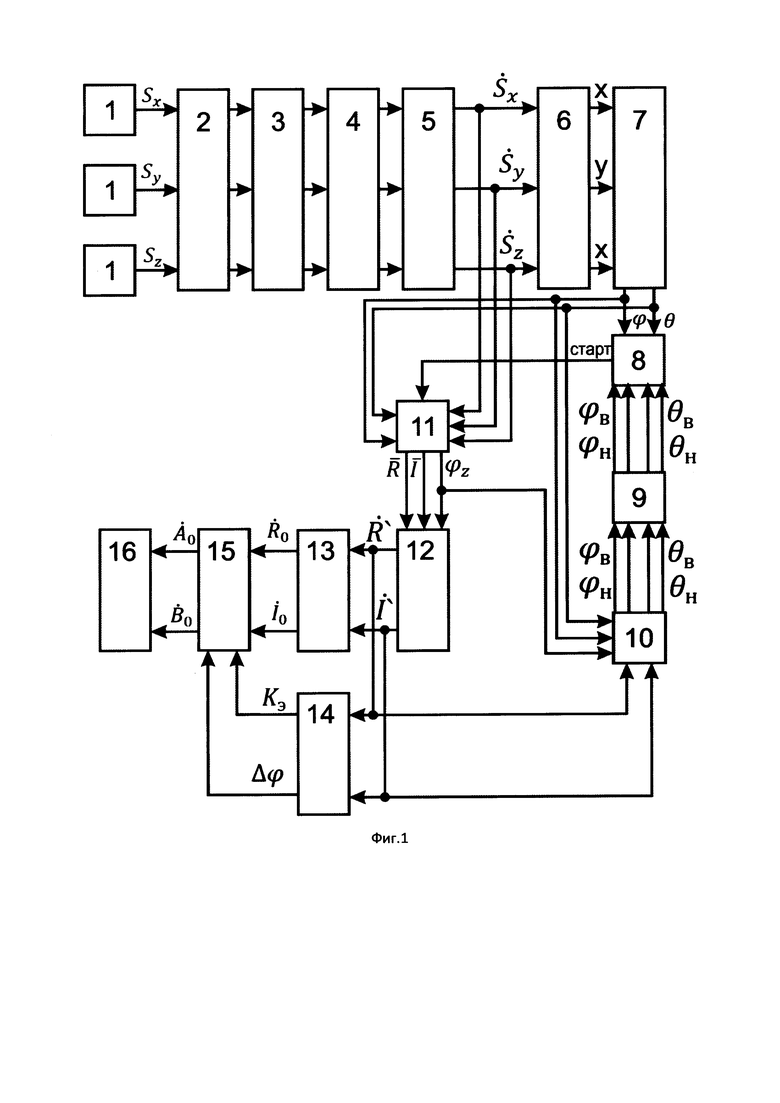
На фиг. 1 показана блок-схема устройства для пространственной селекции электромагнитных волн с поляризационной обработкой сигналов.
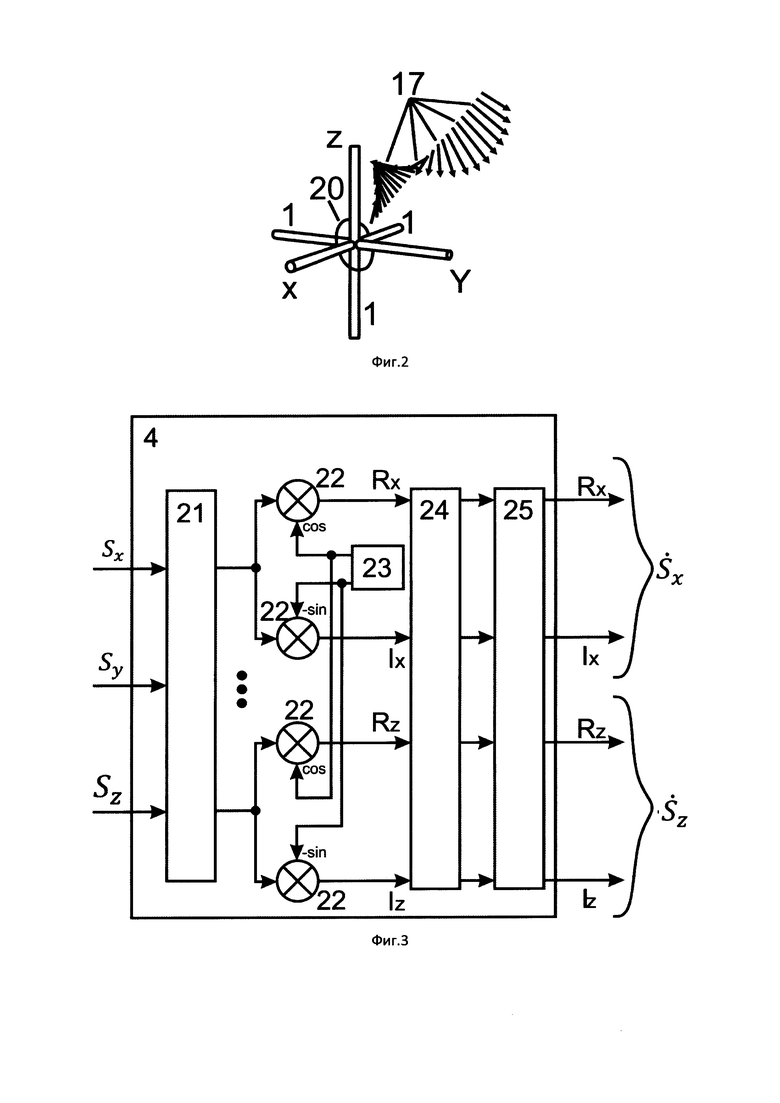
На фиг. 2 показаны антенные элементы с приходящей электромагнитной волной (ЭМВ) и эллипсом поляризации.
На фиг. 3 показана блок-схема многоканального квадратурного преобразователя.
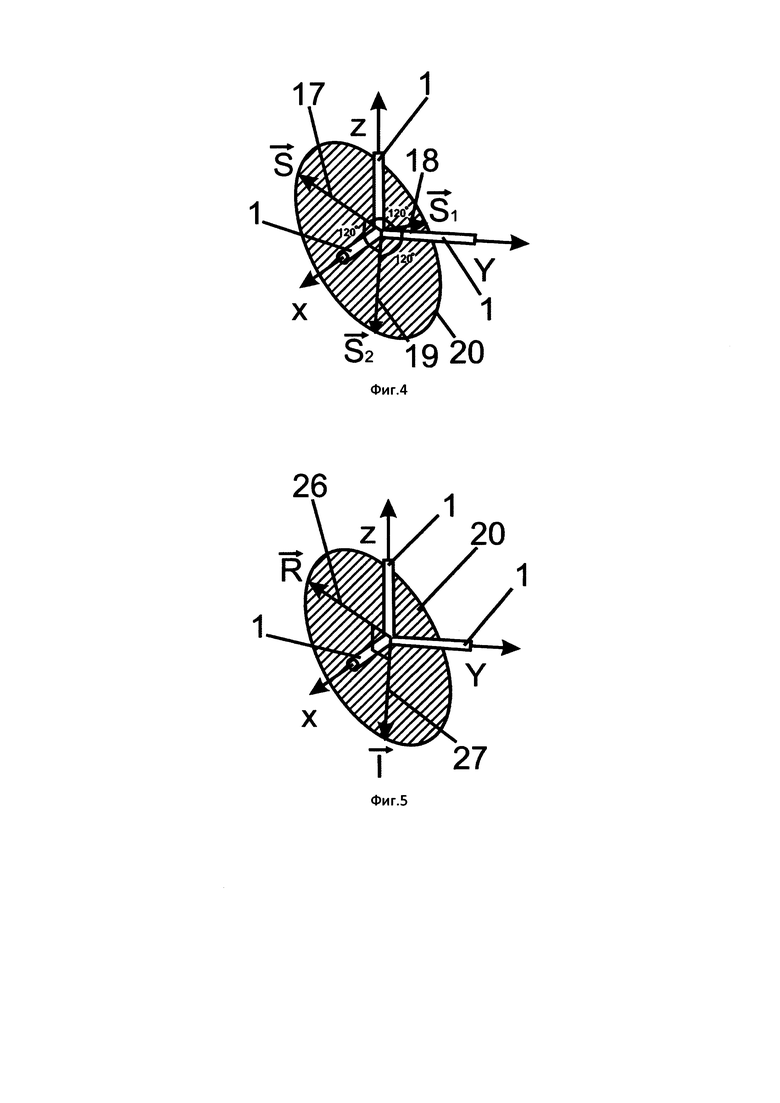
На фиг. 4 показано формирование векторов  и
и  сдвинутых по фазе на +120° и -120° соответственно относительно вектора электромагнитного поля
сдвинутых по фазе на +120° и -120° соответственно относительно вектора электромагнитного поля 
На фиг. 5 показаны действительная  и мнимая
и мнимая  части вектора электромагнитного поля
части вектора электромагнитного поля 
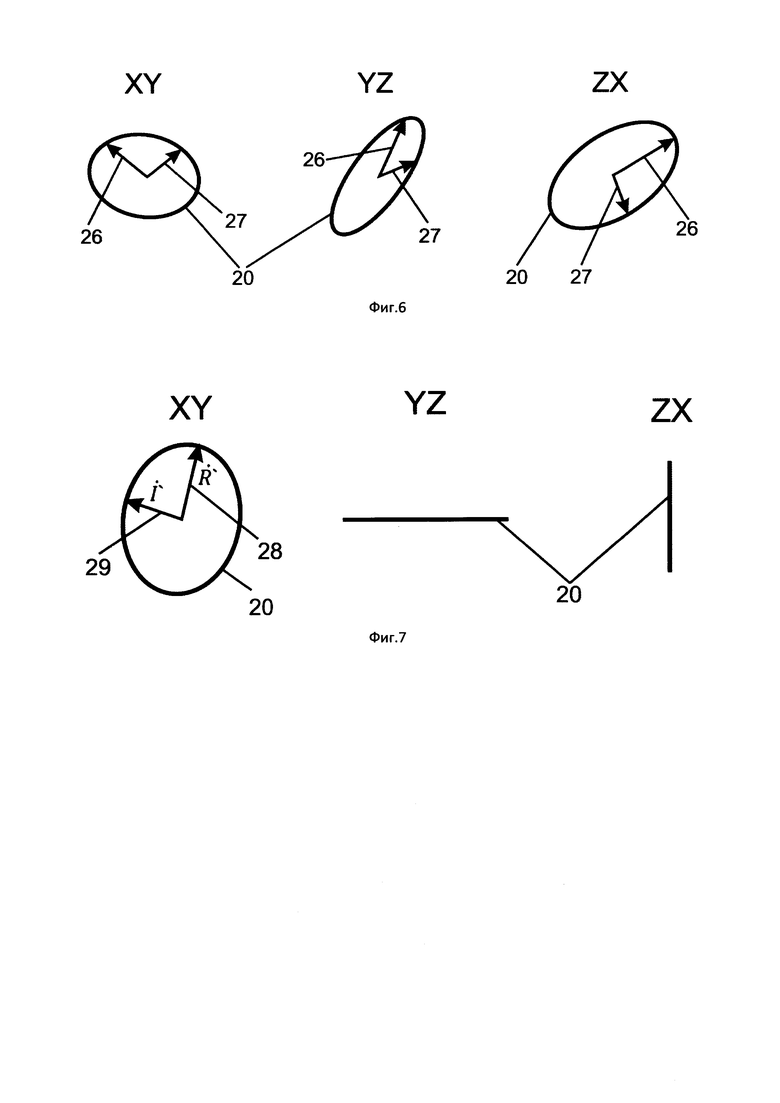
На фиг. 6 показаны проекции векторов  и
и  на ортогональные плоскости.
на ортогональные плоскости.
На фиг. 7 показаны проекции векторов на ортогональные плоскости после поворота эллипса поляризации в плоскость XY.
На фиг. 8 показан пользовательский интерфейс в виде графиков.
На фиг. 9 показан пользовательский интерфейсе виде диаграмм.
На фигурах обозначено: 1 - антенные элементы, 2 - многоканальный фильтр, 3 - многоканальный усилитель, 4 - многоканальный квадратурный преобразователь, 5 - многоканальный блок быстрого преобразования Фурье; 6 - блок определения параметров вектора нормали к плоскости поляризации электромагнитной волны, 7 - блок определения угловых координат прихода ЭМВ, 8 - блок сравнения, 9 - блок памяти, 10 - пользовательский интерфейс, 11 - блок вычисления угла наклона большой оси эллипса поляризации ϕz, 12 - блок компенсации амплитудно-фазовых смещений, 13 - блок преобразования комплексных сигналов, 14 - блок вычисления коэффициента эллиптичности и Δϕ, 15 - блок деполяризации информационного сигнала, 16 - блок демодуляции и декодирования сигнала, 17 - комплексный вектор электромагнитного поля  18 - комплексный вектор
18 - комплексный вектор  сдвинутый относительно вектора электромагнитного поля
сдвинутый относительно вектора электромагнитного поля  на +120°, 19 - комплексный вектор
на +120°, 19 - комплексный вектор  сдвинутый относительно вектора электромагнитного поля
сдвинутый относительно вектора электромагнитного поля  на -120°, 20 - эллипс поляризации, 21 - многоканальный аналого-цифровой преобразователь (АЦП), 22 - умножители, 23 - гетеродин, 24 - многоканальный фильтр нижних частот, 25 - многоканальный дециматор, 26 -
на -120°, 20 - эллипс поляризации, 21 - многоканальный аналого-цифровой преобразователь (АЦП), 22 - умножители, 23 - гетеродин, 24 - многоканальный фильтр нижних частот, 25 - многоканальный дециматор, 26 -  -вектор, 27 -
-вектор, 27 -  -вектор, 28 -
-вектор, 28 -  -комплексный вектор, образованный после после поворота эллипса поляризации в плоскость XY, 29 -
-комплексный вектор, образованный после после поворота эллипса поляризации в плоскость XY, 29 -  -комплексный вектор, образованный после после поворота эллипса поляризации в плоскость XY.
-комплексный вектор, образованный после после поворота эллипса поляризации в плоскость XY.
Осуществление изобретения.
В одном из вариантов реализации устройство для пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов содержит идентичные антенные элементы 1, соответствующие осям X, Y и Z (см. Фиг. 2), расположенные перпендикулярно друг относительно друга, при этом фазовые центры антенных элементов 1 должны располагаться в одной точке. Сигнальные выходы антенных элементов 1 последовательно соединены с многоканальным фильтром 2, многоканальным усилителем 3, многоканальным квадратурным преобразователем 4 и многоканальным блоком быстрого преобразования Фурье 5. Выходы многоканального блока быстрого преобразования Фурье 5 подключены к блоку определения угловых координат прихода ЭМВ 6 и к блоку вычисления угла наклона большой оси эллипса поляризации ϕz 11, при этом выходы блока определения угловых координат прихода ЭМВ 6 последовательно подключены к блоку определения угловых координат прихода ЭМВ 7 и блоку сравнения 8, управляющий выход которого подключен к блоку вычисления угла наклона большой оси эллипса поляризации ϕz 11, выходы которого подключены к блоку компенсации амплитудно-фазовых смещений 12, при этом выход «ϕz» также подключен к пользовательскому интерфейсу 10. Выходы блока компенсации амплитудно-фазовых смещений 12 подключены к блоку вычисления коэффициента эллиптичности и Δϕ 14, а также последовательно соединены с блоком преобразования комплексных сигналов 13, блоком деполяризации информационного сигнала 15 и блоком демодуляции и декодирования сигнала 16, выход которого подключен к пользовательскому интерфейсу 10. Выходы блока вычисления коэффициента эллиптичности и Δϕ 14 подключены к блоку деполяризации информационного сигнала 15 и к пользовательскому интерфейсу 10. К блоку сравнения 8 подключен блок памяти 9, к которому подключен пользовательский интерфейс 10.
Многоканальный квадратурный преобразователь 4 включает многоканальный аналого-цифровой преобразователь (АЦП) 21, входы которого являются входами многоканального квадратурного преобразователя 4, каждый выход многоканального аналого-цифрового преобразователя 21 подключен к паре умножителей 22, к одному из которых подключен выход «cos», а к другому выход «-sin» гетеродина 23, при этом выходы умножителей 22 последовательно соединены с многоканальным низкочастотным фильтром 24 и многоканальным дециматором 25, выходы которого являются выходами многоканального квадратурного преобразователя 4.
Способ пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов осуществляется следующим образом.
Первоначально ориентируют по сторонам света антенные элементы 1, соответствующие сторонам осям X, Y и Z таким образом, чтобы антенному элементу 1 (ось X) соответствовало направление восток-запад, антенному элементу 1 (ось Y) соответствовало направление север-юг и антенному элементу 1 (ось Z) соответствовало вертикальное направление. После чего в пользовательском интерфейсе 10 задают диапазоны азимута ϕн≤ϕ≤ϕв и угла места θн≤θ≤θв ожидаемого прихода ЭМВ. Из пользовательского интерфейса 10 данные значения передают и сохраняют в блоке памяти 9.
Например, в пользовательском интерфейсе 10 задают следующие значения азимута ϕн=300°, ϕв=345° и угла места θн=30°, θв=45°, которые сохраняют в блоке памяти 9.
Затем антенными элементами 1 начинают принимать ортогональные компоненты электромагнитного поля
где  - действующая длина антенных элементов 1, Emx, Emy, Emz - амплитуды и ϕx, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции.
- действующая длина антенных элементов 1, Emx, Emy, Emz - амплитуды и ϕx, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции.
После чего сигналы поступают последовательно в многоканальный фильтр 2, усилитель 3 и квадратурный преобразователь 4.
В квадратурном преобразователе 4 поступающие аналоговые сигналы Sx, Sy и Sz оцифровываются многоканальным АЦП 19, после чего на выходе которого для каждого канала цифровой сигнал поступает параллельно на 2 умножителя 20. При этом на один умножитель 20 поступают сигналы с выхода «cos» гетеродина 21, а на другой умножитель 20 поступают сигналы с выхода «-sin» гетеродина 21, при этом с выходов умножителей 20 соответственно для каждого канала формируются вещественные Rx, Ry и Rz, а также мнимые части Ix, Iy и Iz цифровых сигналов.
Дальнейшую поляризационную обработку возможно осуществлять как во временной, так и в частотной области. Для перехода в частотную область необходимо выполнить прямое преобразование Фурье, для чего с выхода квадратурного преобразователя 4 комплексные сигналы поступают в многоканальный блок быстрого преобразования Фурье 5, в котором их переводят в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты ортогональных проекций сигнала:

где Um - амплитуда на выходе соответствующего канала квадратурного преобразователя (X, Y и Z),  комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей.
комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей.
Затем комплексные компоненты передают в блок определения вектора нормали  к плоскости поляризации в котором вычисляют компоненты [x, y, z].
к плоскости поляризации в котором вычисляют компоненты [x, y, z].
В одном варианте реализации заявленного способа (см. Фиг. 4) для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации, образованной эллипсом поляризации 18, формируют дополнительные комплексные вектора
к плоскости поляризации, образованной эллипсом поляризации 18, формируют дополнительные комплексные вектора  18 и
18 и  19 сдвинутые относительно вектора электромагнитного поля
19 сдвинутые относительно вектора электромагнитного поля  17 на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят
17 на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят
Нахождение компонентов [x, y, z] вектора нормали  к плоскости поляризации таким образом сводится к расчету параметров плоскости проходящей через точки образованные вещественной частью комплексных векторов
к плоскости поляризации таким образом сводится к расчету параметров плоскости проходящей через точки образованные вещественной частью комплексных векторов 
 и
и  Уравнение плоскости, проходящей через три точки можно представить, как
Уравнение плоскости, проходящей через три точки можно представить, как

Нормаль к данной плоскости  будет определяться выражениями
будет определяться выражениями

В другом варианте реализации заявленного способа (см. Фиг. 5) для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля
к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля

где
Таким образом, оба эти вектора будут синфазно вращаться с течением времени в плоскости поляризации (см. Фиг. 5), образованной эллипсом поляризации 18.
После чего из  24 и
24 и  25 формируют кватернионы с нулевой вещественной частью
25 формируют кватернионы с нулевой вещественной частью

и перемножают их  затем умножают получившийся кватернион на коэффициент
затем умножают получившийся кватернион на коэффициент  где
где  - модуль кватерниона,
- модуль кватерниона,  - аргумент (фаза) кватерниона и тем самым определяют компоненты вектора нормали к плоскости поляризации
- аргумент (фаза) кватерниона и тем самым определяют компоненты вектора нормали к плоскости поляризации 
После вычисления компонентов [x, y, z] вектора нормали  к плоскости поляризации их передают в блок определения угловых координат прихода ЭМВ 7, в котором вычисляют азимут ϕ по соотношению
к плоскости поляризации их передают в блок определения угловых координат прихода ЭМВ 7, в котором вычисляют азимут ϕ по соотношению  и угол места θ по соотношению
и угол места θ по соотношению  и затем вычисленные значения углов передают в блок сравнения 8, в котором производят определяют попадают ли вычисленные значения ϕ и θ в заданные интервалы азимута ϕн≤ϕ≤ϕв и θн≤θ≤θв, в случае попадания углов в заданные интервалы продолжают обработку входных сигналов, для чего блок сравнения 8 формирует и передает управляющий сигнал в блок вычисления угла наклона большой оси эллипса поляризации ϕz 11.
и затем вычисленные значения углов передают в блок сравнения 8, в котором производят определяют попадают ли вычисленные значения ϕ и θ в заданные интервалы азимута ϕн≤ϕ≤ϕв и θн≤θ≤θв, в случае попадания углов в заданные интервалы продолжают обработку входных сигналов, для чего блок сравнения 8 формирует и передает управляющий сигнал в блок вычисления угла наклона большой оси эллипса поляризации ϕz 11.
Кроме того, с выходом блока определения угловых координат прихода ЭМВ 7 вычисленные значения ϕ и θ передают в пользовательский интерфейс 10, в котором производят их отображение (см. Фиг. 8 и Фиг. 9).
Далее в блоке 11 вычисляют угол наклона большой оси эллипса поляризации ϕz путем поворота пространственно-ортогональных проекций (см. Фиг. 6) в плоскость XY. Для чего на основе уже известных азимута и угла места вычисляют углы Эйлера

Матрица последовательных поворотов вокруг осей Z-X-Z, соответствующая углам Эйлера будет иметь вид

Учитывая, что угол собственного вращения ϕz=0 матрицу поворота можно записать в более простом виде

Тогда в соответствии с [Byung-UkLee, StereoMatchingofSkullLandmarks, Ph.D. Thesis, StanfordUniv., Stanford, CA, 1991] кватернион, определяющий обратный поворот плоскости поляризации в пространстве

где 
Тогда поворот векторов (8) или соответствующих им кватернионов в плоскость XY (см. Фиг. 7), можно выполнить следующей операцией

Выполнив данную операцию компоненты векторов  и
и  по оси z становятся равные 0, т.е.
по оси z становятся равные 0, т.е.

После чего на основе векторов  и
и  (19) формируют комплексные числа
(19) формируют комплексные числа  и
и  соответственно
соответственно

и вычисляют угол ϕz:

который равняется наклону большой оси эллипса поляризации или углу собственного вращения, при этом значение ϕz передают и отображают в пользовательском интерфейсе 10 (см. Фиг. 8 и Фиг. 9).
На следующем этапе поляризационной обработки сигнала в блоке 12 производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации и вычисляют

где 
Далее в блоке 13 осуществляют преобразование комплексных сигналов к следующему виду:

Одновременно в блоке 14 определяют коэффициент эллиптичности и Δϕ по следующим соотношениям:

При этом значения Kэ и Δϕ передают и отображают в пользовательском интерфейсе 10 (см. Фиг. 8 и Фиг. 9).
На завершающем этапе поляризационной обработки сигналов в блоке 15 производят деполяризацию информационного (полезного) сигнала

где 
После его деполяризованный сигнал передают в блок демодуляции и декодирования 16, который осуществляет выделение информационной части сигнала и передает ее на пользовательский интерфейс 10.
Заявленный способ пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов позволяет:
- измерить все пространственно-поляризационные параметры ЭМВ: направление прихода (азимут и угол места), параметры поляризации (наклон эллипса поляризации, коэффициент эллиптичности, направление вращения);
- производить обработку как во временной, так и в частотной области;
- расчет параметров возможен в момент времени либо по частотной гармонике без статистического накопления;
- повысить энергетическую доступность за счет адаптации антенно-приемной системы к пространственно-поляризационным параметрам ЭМВ;
- выделить информационный (полезный) сигнал из приходящей ЭМВ с произвольной поляризацией и с произвольного направления.
Блоки 6-15 устройства для пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов полностью охарактеризованы на функциональном уровне и описываемая форма реализации предполагает использование логических элементов или программируемого (настраиваемого) многофункционального средства. Таким образом данные признаки имеют материальную сущность и действия осуществляются над материальными объектами.
В 2018 году заявитель изготовил экспериментальный макет заявленного технического решения, которое реализует способ пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов, испытания которого подтвердили достижение заявленного технического результата, выразившегося в повышении энергетической доступности источников электромагнитных волн, повышении точности определения направления прихода электромагнитной волны за счет обеспечения пространственно-поляризационной согласованности антенно-приемного тракта.
Заявленный способ пространственной селекции электромагнитных волн позволяет реализовать прием ортогональных компоненты электромагнитного поля с их последующим преобразованием в цифровые сигналы, и затем обеспечить вычисление значения азимута и угла места прихода электромагнитной волны. Пространственно-поляризационная обработка в гиперкомплексном пространстве на основе измеренных комплексных амплитуд поля радиоволны по ортогональным осям позволяет оценить: направление прихода ЭМВ (азимут и угол места), параметры поляризации (коэффициент эллиптичности, направление вращения, наклон эллипса поляризации). С этой точки зрения применение понятия полного вектора поля, как информационного параметра, представляет собой принципиально иной подход к решению задачи определения направления прихода электромагнитной волны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и селекции радиосигналов по комплексному поляризационному признаку | 2024 |
|
RU2840500C1 |
| АНТЕННА ТРИОРТОГОНАЛЬНАЯ | 2016 |
|
RU2649097C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482509C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АНТЕННОЙ РЕШЕТКОЙ ИДЕНТИЧНО ОРИЕНТИРОВАННЫХ ВЕКТОРНЫХ ИЗЛУЧАТЕЛЕЙ | 2006 |
|
RU2330356C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПРОИЗВОЛЬНО ПОЛЯРИЗОВАННЫХ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2005 |
|
RU2301483C1 |
| СПОСОБ АДАПТИВНОГО ПРЕОБРАЗОВАНИЯ ПОЛЯРИЗАЦИИ РАДИОСИГНАЛОВ | 1993 |
|
RU2090963C1 |

Изобретение относится к области радиотехники, в частности к способам измерения параметров поляризации и направления прихода электромагнитной волны, и может найти применение при обработке радиосигналов в многоканальных радиоприемных трактах для измерения пространственно-поляризационных параметров и деполяризации электромагнитных волн. Техническим результатом изобретения является повышение энергетической доступности источника электромагнитных волн, обеспечение пространственно-поляризационной согласованности антенно-приемного тракта, повышение точности определения направления прихода электромагнитной волны, который достигается за счет того, что принимают ортогональные компоненты электромагнитного поля, после чего для каждого канала последовательно производят фильтрацию, усиление, оцифровку, квадратурное преобразование и перевод в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты, которые передают в блок определения вектора нормали к плоскости поляризации, в котором вычисляют его компоненты и затем передают их в блок определения угловых координат направления прихода электромагнитной волны, в котором вычисляют азимут ϕ и угол места θ, после чего, если вычисленные значения ϕ и θ попадают в заданные интервалы, тогда продолжают обработку входных сигналов и затем определяют угол собственного вращения ϕz (угол наклона большой оси эллипса), после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации, определяют коэффициент эллиптичности и на завершающем этапе производят деполяризацию информационного (полезного) сигнала. 2 н. и 7 з.п. ф-лы, 9 ил.
1. Способ пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов, характеризующийся тем, что принимают ортогональные компоненты электромагнитного поля, преобразуют их в цифровые сигналы, и затем вычисляют значения азимута и угла места прихода электромагнитной волны, отличающийся тем, что задают и сохраняют диапазоны азимута ϕн≤ϕ≤ϕв и угла места θн≤θ≤θв прихода электромагнитной волны и антенными элементами X, Y и Z триортогональной антенны начинают принимать ортогональные компоненты электромагнитного поля



где  - действующая длина антенного элемента, Emx, Emy, Emz - амплитуды и ϕх, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции, после чего последовательно для каждого канала фильтруют, усиливают, оцифровывают, осуществляют квадратурное преобразование входных сигналов и переводят их в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты
- действующая длина антенного элемента, Emx, Emy, Emz - амплитуды и ϕх, ϕy, ϕz - начальные фазы приходящей электромагнитной волны, ϕ(t) и s(t) - изменение фазы и амплитуды, зависящие от сигнала первичного сообщения, вида и параметров модуляции, после чего последовательно для каждого канала фильтруют, усиливают, оцифровывают, осуществляют квадратурное преобразование входных сигналов и переводят их в частотную область посредством быстрого преобразования Фурье и тем самым получают комплексные компоненты

 и
и 
где Um - амплитуда на выходе соответствующего квадратурного преобразователя,  комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей, затем комплексные компоненты передают в блок определения вектора нормали
комплексная амплитуда сигнала, s и ϕ - амплитуда и фаза модулирующего сигнала в момент времени или на одной частотной составляющей, затем комплексные компоненты передают в блок определения вектора нормали  к плоскости поляризации, в котором вычисляют его компоненты [x, y, z] и затем передают их в блок определения угловых координат направления прихода электромагнитной волны, в котором вычисляют азимут ϕ по соотношению
к плоскости поляризации, в котором вычисляют его компоненты [x, y, z] и затем передают их в блок определения угловых координат направления прихода электромагнитной волны, в котором вычисляют азимут ϕ по соотношению  и угол места θ по соотношению
и угол места θ по соотношению  после чего, если вычисленные значения ϕ и θ попадают в заданные интервалы, тогда продолжают обработку входных сигналов и затем определяют угол собственного вращения ϕz (угол наклона большой оси эллипса)
после чего, если вычисленные значения ϕ и θ попадают в заданные интервалы, тогда продолжают обработку входных сигналов и затем определяют угол собственного вращения ϕz (угол наклона большой оси эллипса)
где 
 после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации,
после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации,

где  после этого определяют коэффициент эллиптичности
после этого определяют коэффициент эллиптичности  и
и  где
где 
 на завершающем этапе производят деполяризацию информационного (полезного) сигнала
на завершающем этапе производят деполяризацию информационного (полезного) сигнала
где 
2. Способ по п. 1, отличающийся тем, что ориентируют по сторонам света антенные элементы X, Y и Z таким образом, чтобы антенному элементу X соответствовало направление восток-запад, антенному элементу Y соответствовало направление север-юг и антенному элементу Z соответствовало вертикальное направление.
3. Способ по п. 1, отличающийся тем, что для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации формируют дополнительные комплексные вектора
к плоскости поляризации формируют дополнительные комплексные вектора  и
и  сдвинутые относительно вектора электромагнитного поля
сдвинутые относительно вектора электромагнитного поля  на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят
на +120° и -120° соответственно, при этом ортогональные проекции данных векторов составят

после чего вычисляют вектор нормали  к плоскости поляризации по следующим соотношениям
к плоскости поляризации по следующим соотношениям
х=Sy(S1z-S2z)+Sz(S2y-S1y)+S1yS2z-S2yS1z,
y=Sx(S2z-S1z)+Sz(S1x-S2x)+S2xS1z-S1xS2z,
z=Sx(S1y-S2y)+Sy(S2x-S1x)+S1xS2y-S2xS1y.
4. Способ по п. 1, отличающийся тем, что для определения компонентов [x, y, z] вектора нормали  к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля
к плоскости поляризации формируют вектор действительных и мнимых частей текущего вектора электромагнитного поля

после чего из них формируют кватернионы с нулевой вещественной частью

и перемножают их

затем умножают получившийся кватернион на коэффициент  где
где  - модуль кватерниона,
- модуль кватерниона,  - аргумент (фаза) кватерниона, и тем самым определяют компоненты вектора нормали к плоскости поляризации
- аргумент (фаза) кватерниона, и тем самым определяют компоненты вектора нормали к плоскости поляризации
5. Способ по п. 1, отличающийся тем, что в пользовательский интерфейс передают и отображают значения азимута ϕ и угла места θ прихода электромагнитной волны, значение угла наклона большой оси эллипса ϕz, а также коэффициент эллиптичности Kэ и Δϕ.
6. Способ по п. 5, отличающийся тем, что в пользовательском интерфейсе значения отображают в виде графиков и/или диаграмм.
7. Устройство для пространственной селекции электромагнитных волн с последующей поляризационной обработкой сигналов, содержащее идентичные антенные элементы, расположенные перпендикулярно друг относительно друга с возможностью приема ортогональных проекций электромагнитной волны, а также блок определения угловых координат прихода электромагнитной волны, отличающееся тем, что антенные элементы последовательно соединены с многоканальным фильтром, многоканальным усилителем, многоканальным квадратурным преобразователем и многоканальным блоком быстрого преобразования Фурье, выходы которого подключены к блоку определения угловых координат прихода ЭМВ, блоку вычисления угла наклона большой оси эллипса поляризации ϕz, при этом выходы блока определения угловых координат прихода ЭМВ подключены к блоку вычисления угла наклона большой оси эллипса поляризации ϕz, к пользовательскому интерфейсу и к блоку сравнения, управляющий выход которого подключен к блоку вычисления угла наклона большой оси эллипса поляризации ϕz, выходы которого подключены к блоку поворота плоскости поляризации, при этом выход «ϕz» также подключен к пользовательскому интерфейсу, выходы блока компенсации амплитудно-фазовых смещений подключены к блоку вычисления коэффициента эллиптичности и Δϕ, а также последовательно соединены с блоком преобразования комплексных сигналов, блоком деполяризации информационного сигнала и блоком демодуляции и декодирования сигнала, при этом выходы блока вычисления коэффициента эллиптичности и Δϕ подключены к блоку деполяризации информационного сигнала и к пользовательскому интерфейсу, к блоку сравнения подключен блок памяти, к которому подключен пользовательский интерфейс.
8. Устройство по п. 7, отличающееся тем, что многоканальный квадратурный преобразователь включает многоканальный аналого-цифровой преобразователь, входы которого являются входами многоканального квадратурного преобразователя, каждый выход многоканального аналого-цифрового преобразователя подключен к паре умножителей, к одному из которых подключен выход cos, а к другому выход -sin гетеродина, при этом выходы умножителей последовательно соединены с многоканальным низкочастотным фильтром и дециматором, выходы которого являются выходами многоканального квадратурного преобразователя.
9. Устройство по п. 7, отличающееся тем, что фазовые центры антенных элементов расположены в одной точке.
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ПЕЛЕНГОВАНИЯ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2010 |
|
RU2431862C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-НЕЗАВИСИМОГО ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ШИРОКОПОЛОСНЫХ РАДИОСИГНАЛОВ | 2009 |
|
RU2410707C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОЛЯРИЗАЦИИ ВЕКТОРНОГО СИГНАЛА | 1999 |
|
RU2168744C2 |
| CN 106970361 A, 21.07.2017 | |||
| US 6768971 B1, 27.07.2004 | |||
| DE 4435609 C1, 14.03.1996 | |||
| ОДНОРАЗОВЫЙ ПОДГУЗНИК ТИПА ТРУСОВ | 2017 |
|
RU2737305C2 |
| WO 9966341 A1, 23.12.1999 | |||
| US 4323898 A, 06.04.1982. | |||

