Изобретение относится к вычислительной технике и может быть использовано для оценки состояния объекта по нескольким параметрам при нечетком задании степени принадлежности возможных значений параметров заданному состоянию объекта.
Известно устройство для распознавания ситуаций (патент Российской Федерации N 2012056, кл. G 06 K 9/00, опублик. 1994), содержащее многоразрядные сдвиговые регистры, генератор тактовых импульсов, вычислители функции принадлежности, умножители на коэффициенты, вычислители медианного значения и блок выделения максимального сигнала.
Недостатком устройства является низкая точность.
Наиболее близким к заявляемому является устройство для распознавания ситуаций (патент Российской Федерации N 2012057, кл. G 06 K 9/00, опублик. 1994), содержащее многоразрядные регистры сдвига, к тактовым входам которых подключен выход генератора тактовых импульсов. Выход генератора тактовых импульсов также подключен к блоку памяти постоянных значений через счетчик импульсов. Выходы регистров сдвига и блока памяти постоянных значений подключены ко входам вычислителей функции принадлежности, которые соединены через умножители на коэффициенты с сумматорами. Сумматоры подключены к блоку выделения максимального сигнала.
Это устройство при распознавании использует коэффициенты важности γ, которые выбираются с учетом их нормировки  , где m - число измеряемых параметров. Вычисленные функции принадлежности умножаются в блоке умножителей на коэффициенты важности и затем суммируются сумматорами. Применение коэффициентов важности повышает точность устройства, регулируя важность различных параметров, по которым ведется распознавание. Однако при этом не учитывается взаимозависимость показателей, которая характерна для большинства задач распознавания, что отрицательно влияет на точность устройства.
, где m - число измеряемых параметров. Вычисленные функции принадлежности умножаются в блоке умножителей на коэффициенты важности и затем суммируются сумматорами. Применение коэффициентов важности повышает точность устройства, регулируя важность различных параметров, по которым ведется распознавание. Однако при этом не учитывается взаимозависимость показателей, которая характерна для большинства задач распознавания, что отрицательно влияет на точность устройства.
Недостатком данного устройства является низкая точность.
Технической задачей изобретения является повышение точности распознавания.
Указанная задача решается тем, что в устройство для распознавания ситуаций, содержащее многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, блок памяти постоянных значений, введены блоки вычисления минимума, выполненные в виде группы ПЗУ, и блок вычисления максимума, выполненный в виде ПЗУ, причем информационные первые входы многоразрядных регистров сдвига являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига соединены с выходом генератора тактовых импульсов, причем выход генератора тактовых импульсов также соединен со входом счетчика импульсов, выход которого соединен со входами блока памяти постоянных значений, a N выходов регистров сдвига соединены с первыми входами вычислителей функции принадлежности, вторые входы которых соединены с выходами блока памяти постоянных значений, а выходы вычислителей функции принадлежности соединены со входами блоков вычисления минимума, выходы которых соединены с m входами блока вычисления максимума, выход которого является выходом устройства.
Сущность изобретения поясняется чертежом, на котором представлена структурная схема устройства для распознавания ситуаций.
Устройство содержит многоразрядные регистры сдвига 1.1...1.m, генератор тактовых импульсов 2, вычислители функции принадлежности 3, блоки вычисления минимума 4, блок вычисления максимума 5, счетчик импульсов 6, блок памяти постоянных значений 7.
Информационные первые входы многоразрядных регистров сдвига 1.1...1.m являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига 1.1...1.m соединены с выходом генератора тактовых импульсов 2, причем выход генератора тактовых импульсов 2 также соединен со входом счетчика импульсов 6, выход которого соединен со входами блока памяти постоянных значений 7, a N выходов регистров сдвига 1.1...1.m соединены с первыми входами вычислителей функции принадлежности 3, вторые входы которых соединены с выходами блока памяти постоянных значений 7, а выходы вычислителей функции принадлежности 3 соединены со входами блоков вычисления минимума 4, выходы которых соединены с m входами блока вычисления максимума 5, выход которого является выходом устройства.
Устройство для распознавания ситуаций работает следующим образом.
На входы регистров 1.1. . .1.m по сигналам генератора 2 заносятся результаты измерений Sij параметров, характеризующих состояние объекта ( где m - число измеряемых параметров; N - число ячеек сдвиговых регистров). Таким образом, в установившемся состоянии в каждом регистре 1.i находится N отсчетов соответствующего параметра.
где m - число измеряемых параметров; N - число ячеек сдвиговых регистров). Таким образом, в установившемся состоянии в каждом регистре 1.i находится N отсчетов соответствующего параметра.
Каждому значению параметра соответствует значение функции принадлежности  , характеризующей принадлежность j-го значения i-го параметра некоторому заданному состоянию объекта.
, характеризующей принадлежность j-го значения i-го параметра некоторому заданному состоянию объекта.
В каждом из блоков 3.i.j вычисляется значение функции принадлежности для текущего значения Sij. Блоки 3.i.j выполняются в виде ПЗУ и программируются на соответствующую функцию принадлежности "примерного равенства" линейного вида
где  - функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта (
- функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта ( где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); Soi и σi - параметры положения и размаха функции принадлежности, соответствующие безусловному состоянию объекта в заданном состоянии.
где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); Soi и σi - параметры положения и размаха функции принадлежности, соответствующие безусловному состоянию объекта в заданном состоянии.
При этом параллельно с работой устройства по импульсам генератора 2 заполняется счетчик 6, на выходе которого формируется сигнал, пропорциональный, например, текущему времени t. Код сигнала поступает на адресные входы блока 7. На выходе каждого ПЗУ блока 7 из них формируются в соответствии с переменными входными сигналами переменные значения величины σi, которые становятся функцией времени σi(t). Значения σi(t), поступающие на вторые входы вычислителей 3, изменяют формируемые значения функции принадлежности (см. формулу (1)).
Зависимость σi(t) может иметь любой требуемый вид, например гармонический или пилообразный, если, например, устройство работает в условиях переменной периодически измеряющейся освещенности.
Для учета взаимозависимости параметров, по которым ведется распознавание, и получения обобщенной оценки входной ситуации e используется нечеткий интеграл
где K = {S1,S2,...,Sm} - множество параметров; - функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние (объекта
- функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние (объекта  , где m - число измеряемых параметров; N - число ячеек сдвиговых регистров);
, где m - число измеряемых параметров; N - число ячеек сдвиговых регистров);
g - мера, выражающая степень важности подмножества параметров из K.
Например, g({ S1} ) выражает степень важности параметра S1 при оценке ситуации, g({S1, S2}) аналогично обозначает степень важности показателей S1 и S2, что дает возможность учесть их взаимозависимость.
Нечеткий интеграл вычисляется следующим образом
где Ki = {S1,S2,...Si} - i-е подмножество множества параметров K.
Операции нечеткой дизъюнкции ∨ и нечеткой конъюнкции ∧ эквивалентны взятию над операндами максимума и минимума соответственно.
В вычислителях минимума 4.1. . . 4.m формируются нечеткие конъюнкции,  , причем значения функций принадлежности
, причем значения функций принадлежности  поступают из вычислителей функции принадлежности 3.
поступают из вычислителей функции принадлежности 3.
Нечеткие меры выбираются с учетом их нормировки  . Поэтому нечеткие конъюнкции
. Поэтому нечеткие конъюнкции  можно интерпретировать как возможные значения функций принадлежности распознаваемой ситуации, в качестве которой принимается максимальное значение из сформированных конъюнкций - обобщенная оценка входной ситуации e. Максимальное значение вычисляется в блоке вычисления максимума 5 (см. формулу (2)).
можно интерпретировать как возможные значения функций принадлежности распознаваемой ситуации, в качестве которой принимается максимальное значение из сформированных конъюнкций - обобщенная оценка входной ситуации e. Максимальное значение вычисляется в блоке вычисления максимума 5 (см. формулу (2)).
При поступлении очередных результатов измерений происходит обновление выходного сигнала, что позволяет проводить непрерывно оценку текущей ситуации.
Таким образом, благодаря введению в устройство дополнительных блоков и связей, существенно повышается точность распознавания, поскольку в нем возможно учесть взаимозависимость показателей, по которым ведется распознавание.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1999 |
|
RU2168207C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012057C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2198426C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012056C1 |
| Устройство для распознавания ситуаций | 1990 |
|
SU1741162A1 |
| ПАРАЛЛЕЛЬНАЯ СИСТЕМА ПОИСКА ПРОИЗВОЛЬНЫХ ВХОЖДЕНИЙ | 2001 |
|
RU2220448C2 |
| ИНФОРМАЦИОННО-ПОИСКОВАЯ СИСТЕМА | 2001 |
|
RU2199778C1 |
| УСТРОЙСТВО СОРТИРОВКИ СЛОВ | 2002 |
|
RU2223538C2 |
| ВЫЧИСЛИТЕЛЬ РАНГОВОЙ СТАТИСТИКИ | 1997 |
|
RU2122746C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОШИБОК В КАНАЛЕ | 2001 |
|
RU2192038C1 |
Изобретение относится к вычислительной технике и может быть использовано для оценки состояния объекта по нескольким параметрам при нечетком задании степени принадлежности возможных параметров заданному состоянию объекта. Техническим результатом является повышение точности распознавания. Устройство содержит многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, блоки вычисления минимума, блок вычисления максимума, блок памяти постоянных значений. 1 ил.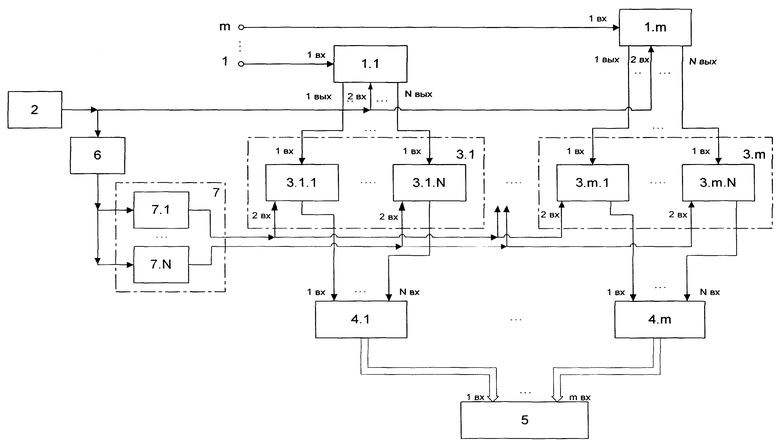
Устройство для распознавания ситуаций, содержащее многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, блок памяти постоянных значений, отличающееся тем, что в устройство введены блоки вычисления минимума и блок вычисления максимума, причем информационные первые входы многоразрядных регистров сдвига являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига соединены с выходом генератора тактовых импульсов, причем выход генератора тактовых импульсов также соединен со входом счетчика импульсов, выход которого соединен со входами блока памяти постоянных значений, а N выходов регистров сдвига соединены с первыми входами вычислителей функции принадлежности, вторые входы которых соединены с выходами блока памяти постоянных значений, а выходы вычислителей функции принадлежности соединены со входами блоков вычисления минимума, выходы которых соединены с m входами блока вычисления максимума, выход которого является выходом устройства.
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012056C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012057C1 |
| RU 94019265 А1, 27.04.1996 | |||
| JP 58219678 A2, 21.12.1983 | |||
| US 5841899 A, 24.11.1998 | |||
| WO 9810369 A1, 12.03.1998. | |||
