Изобретение относится к вычислительной технике и может быть использовано для оценки состояния объекта по нескольким параметрам при нечетком задании степени принадлежности возможных значений параметров заданному состоянию объекта.
Известно устройство для распознавания ситуаций (патент Российской Федерации N 2012056, кл. G 06 K 9/00, опублик. 1994), содержащее многоразрядные сдвиговые регистры, генератор тактовых импульсов, вычислители функции принадлежности, умножители на коэффициенты, вычислители медианного значения и блок выделения максимального сигнала.
Недостатком устройства является низкая точность.
Наиболее близким к заявляемому является устройство для распознавания ситуаций (патент Российской Федерации N 2012057, кл. G 06 K 9/00, опублик. 1994), содержащее многоразрядные регистры сдвига, к тактовым входам которых подключен выход генератора тактовых импульсов. Выход генератора тактовых импульсов также подключен к блоку памяти постоянных значений через счетчик импульсов. Выходы регистров сдвига и блока памяти постоянных значений подключены ко входам вычислителей функции принадлежности, которые соединены через умножители на коэффициенты с сумматорами. Сумматоры подключены к блоку выделения максимального сигнала.
Это устройство при распознавании использует функцию принадлежности линейного вида (формула 1)
где  - функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта
- функция принадлежности j-го значения i-го параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта  где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); S0i и σi - параметры положения и размаха функции принадлежности, характеризующие значение параметра, соответствующее безусловному состоянию объекта в заданном состоянии, и размах функции принадлежности соответственно. При построении данной функции принадлежности не учитывается разная степень нечеткости левой и правой частей функции принадлежности. Также практически во всех задачах распознавания функции принадлежности имеют нелинейный вид.
где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); S0i и σi - параметры положения и размаха функции принадлежности, характеризующие значение параметра, соответствующее безусловному состоянию объекта в заданном состоянии, и размах функции принадлежности соответственно. При построении данной функции принадлежности не учитывается разная степень нечеткости левой и правой частей функции принадлежности. Также практически во всех задачах распознавания функции принадлежности имеют нелинейный вид.
Недостатком данного устройства является низкая точность.
Технической задачей изобретения является повышение точности распознавания.
Указанная задача решается тем, что в устройство для распознавания ситуаций, содержащее многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, умножители на коэффициенты, сумматоры, блок выделения максимального сигнала, введены блок памяти левых коэффициентов нечеткости, выполненный в виде группы ПЗУ, блок памяти правых коэффициентов нечеткости, выполненный в виде группы ПЗУ, причем информационные первые входы многоразрядных регистров сдвига являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига соединены с выходом генератора тактовых импульсов, причем выход генератора тактовых импульсов также соединен со входом счетчика импульсов, выход которого соединен со входами блока памяти левых коэффициентов нечеткости и блока памяти правых коэффициентов нечеткости, a N выходов регистров сдвига соединены с первыми входами вычислителей функции принадлежности, вторые входы которых соединены с выходами блока памяти левых коэффициентов нечеткости, третьи входы вычислителей функции принадлежности соединены с выходами блока памяти правых коэффициентов нечеткости, а выходы вычислителей функции принадлежности соединены со входами умножителей на коэффициент, выходы которых соединены с m входами сумматоров, причем выходы сумматоров соединены с N входами блока выделения максимального сигнала, выход которого является выходом устройства.
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства для распознавания ситуаций, а на фиг. 2-3 даны примеры графиков функций принадлежности параметров.
Устройство содержит многоразрядные регистры сдвига 1.1...1.m, генератор тактовых импульсов 2, вычислители функции принадлежности 3, умножители на коэффициент 4, сумматоры 5, блок выделения максимального сигнала 6, счетчик импульсов 7, блок памяти левых коэффициентов нечеткости 8, блок памяти правых коэффициентов нечеткости 9.
Информационные первые входы многоразрядных регистров сдвига 1.1...1.m являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига 1.1...1.m соединены с выходом генератора тактовых импульсов 2, причем выход генератора тактовых импульсов 2 также соединен со входом счетчика импульсов 7, выход которого соединен со входами блока памяти левых коэффициентов нечеткости 8 и блока памяти правых коэффициентов нечеткости 9, а N выходов регистров сдвига 1.1...1.m соединены с первыми входами вычислителей функции принадлежности 3, вторые входы которых соединены с выходами блока памяти левых коэффициентов нечеткости 8, третьи входы вычислителей функции принадлежности 3 соединены с выходами блока памяти правых коэффициентов нечеткости 9, а выходы вычислителей функции принадлежности 3 соединены со входами умножителей на коэффициент 4, выходы которых соединены с m входами сумматоров 5, причем выходы сумматоров 5 соединены с N входами блока выделения максимального сигнала 6, выход которого является выходом устройства.
Устройство для распознавания ситуаций работает следующим образом.
На входы регистров 1.1...1.m по сигналам генератора 2 заносятся результаты измерений Sij параметров, характеризующих состояние объекта  где m - число измеряемых параметров; N - число ячеек сдвиговых регистров). Таким образом, в установившемся состоянии в каждом регистре 1.i находится N отсчетов соответствующего параметра.
где m - число измеряемых параметров; N - число ячеек сдвиговых регистров). Таким образом, в установившемся состоянии в каждом регистре 1.i находится N отсчетов соответствующего параметра.
Каждому значению параметра соответствует значение функции принадлежности  характеризующей принадлежность j-го значения i-го параметра некоторому заданному состоянию объекта.
характеризующей принадлежность j-го значения i-го параметра некоторому заданному состоянию объекта.
В каждом из блоков 3.i.j вычисляется значение функции принадлежности для текущего значения Sij. Блоки 3.i.j выполняются в виде ПЗУ и программируются на соответствующую функцию принадлежности. Для того чтобы учесть несимметричный и нелинейный характер реальных ситуаций, применена функция принадлежности LR-типа: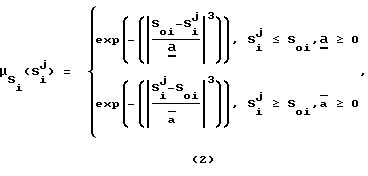
где  - функция принадлежности j-го значения i-ro параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта
- функция принадлежности j-го значения i-ro параметра некоторому заданному состоянию объекта; Sij - параметры, характеризующие состояние объекта  где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); S0i, - параметры положения функции принадлежности, соответствующие безусловному состоянию объекта в заданном состоянии,
где m - число измеряемых параметров; N - число ячеек сдвиговых регистров); S0i, - параметры положения функции принадлежности, соответствующие безусловному состоянию объекта в заданном состоянии,  - левый и правый коэффициенты нечеткости.
- левый и правый коэффициенты нечеткости.
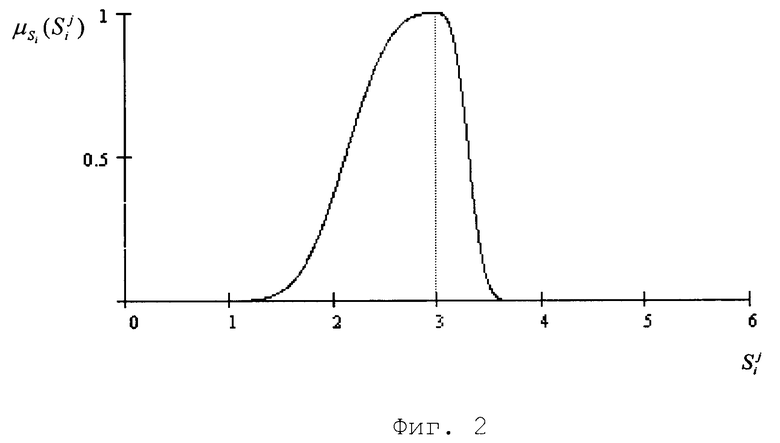
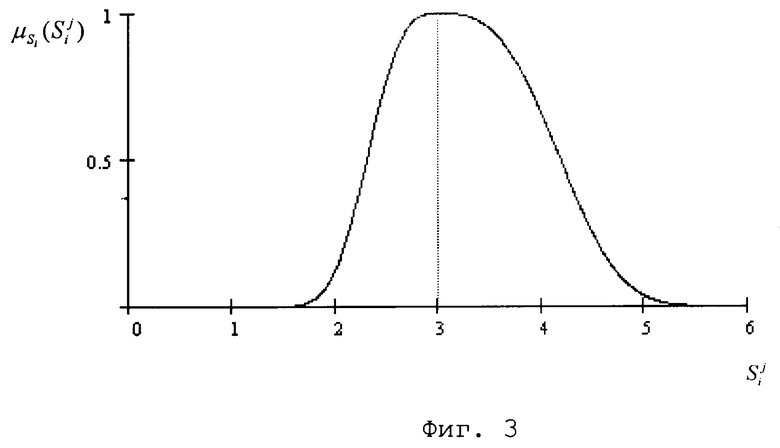
Левый и правый коэффициенты нечеткости дают возможность изменять вид левой и правой частей функции принадлежности, наилучшим образом подстраиваясь под параметры каждой ситуации. На фиг. 2 представлен график функции принадлежности (см формулу (2)) при следующих значениях параметров: S0=3;  На фиг. 3 представлен график функции принадлежности (см формулу (2)) при следующих значениях параметров: S0 = 3;
На фиг. 3 представлен график функции принадлежности (см формулу (2)) при следующих значениях параметров: S0 = 3; 
В умножителях 4.1. . .4.m формируются взвешенные значения функций принадлежности  которые в сумматорах 5 преобразуются во взвешенные суммы
которые в сумматорах 5 преобразуются во взвешенные суммы
Коэффициенты важности выбираются с учетом их нормировки  Поэтому взвешенные суммы ∑j∈(0,1) можно интерпретировать как возможные значения функций принадлежности распознаваемой ситуации, в качестве которой принимается максимальное значение из сформированных взвешенных сумм:
Поэтому взвешенные суммы ∑j∈(0,1) можно интерпретировать как возможные значения функций принадлежности распознаваемой ситуации, в качестве которой принимается максимальное значение из сформированных взвешенных сумм:
При поступлении очередных результатов измерений происходит обновление выходного сигнала, что позволяет проводить непрерывно оценку текущей ситуации. При этом параллельно с работой устройства по импульсам генератора 2 заполняется счетчик 7, на выходе которого формируется сигнал, пропорциональный, например, текущему времени 1. Код сигнала поступает на адресные входы блоков 8 и 9. На выходе каждого ПЗУ блоков 8 и 9 из них формируются в соответствии с переменными входными сигналами переменные значения величин  которые становятся функциями времени
которые становятся функциями времени  .
.
Таким образом, значения  поступающие на вторые и третьи входы вычислителей 3, изменяют вид левой и правой частей формируемых функций принадлежности (см. формулу (2)).
поступающие на вторые и третьи входы вычислителей 3, изменяют вид левой и правой частей формируемых функций принадлежности (см. формулу (2)).
Зависимости  могут иметь любой требуемый вид, например гармонический или пилообразный, если, например, устройство работает в условиях переменной периодически измеряющейся освещенности.
могут иметь любой требуемый вид, например гармонический или пилообразный, если, например, устройство работает в условиях переменной периодически измеряющейся освещенности.
Таким образом, благодаря введению в устройство дополнительных блоков и связей существенно повышается точность распознавания, поскольку в нем возможно учесть изменения как левой, так и правой частей нелинейной функции принадлежности во времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2168764C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2198426C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012057C1 |
| Устройство для распознавания ситуаций | 1990 |
|
SU1741162A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012056C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ОШИБОК В КАНАЛЕ | 2001 |
|
RU2192038C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ СИМВОЛОВ | 2000 |
|
RU2178916C2 |
| СИСТЕМА ДЛЯ СЖАТИЯ ДВУХМЕРНОГО МАССИВА ИНФОРМАЦИИ | 1993 |
|
RU2046398C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СУБОПТИМАЛЬНОГО РАЗМЕЩЕНИЯ И ЕГО ОЦЕНКИ | 2001 |
|
RU2193796C2 |
| Устройство для сравнения нечетких величин | 1991 |
|
SU1809435A1 |
Изобретение относится к вычислительной технике и может быть использовано для оценки состояния объекта по нескольким параметрам при нечетком задании степени принадлежности возможных параметров заданному состоянию объекта. Техническим результатом является повышение точности распознавания. Устройство содержит многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, умножители на коэффициенты, сумматоры, блок выделения максимального сигнала, блоки памяти правых и левых коэффициентов нечеткости. 3 ил.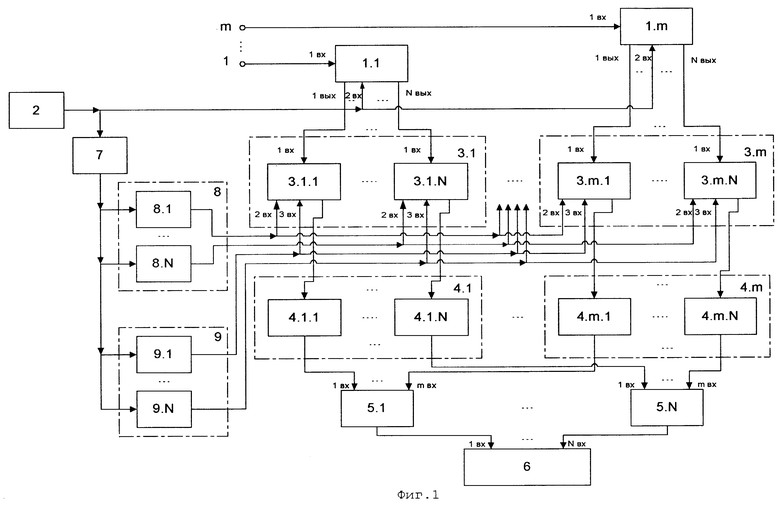
Устройство для распознавания ситуаций, содержащее многоразрядные регистры сдвига, генератор тактовых импульсов, счетчик импульсов, вычислители функции принадлежности, умножители на коэффициенты, сумматоры, блок выделения максимального сигнала, отличающееся тем, что в устройство введены блок памяти левых коэффициентов нечеткости, блок памяти правых коэффициентов нечеткости, причем информационные первые входы многоразрядных регистров сдвига являются соответствующими входами устройства для распознавания ситуаций, а тактовые вторые входы регистров сдвига соединены с выходом генератора тактовых импульсов, причем выход генератора тактовых импульсов также соединен со входом счетчика импульсов, выход которого соединен со входами блока памяти левых коэффициентов нечеткости и блока памяти правых коэффициентов нечеткости, a N выходов регистров сдвига соединены с первыми входами вычислителей функции принадлежности, вторые входы которых соединены с выходами блока памяти левых коэффициентов нечеткости, третьи входы вычислителей функции принадлежности соединены с выходами блока памяти правых коэффициентов нечеткости, а выходы вычислителей функции принадлежности соединены со входами умножителей на коэффициент, выходы которых соединены с m входами сумматоров, причем выходы сумматоров соединены с N входами блока выделения максимального сигнала, выход которого является выходом устройства.
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012057C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 1991 |
|
RU2012056C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ | 1994 |
|
RU2080655C1 |
| JP 58219678 A2, 21.12.1983 | |||
| US 5841899 A, 24.11.1998 | |||
| WO 9810369 А1, 12.03.1998. | |||
