Изобретение относится к способу регистрации падения одного или нескольких регулирующих элементов в активную зону реактора и устройству для его осуществления.
Ядерные реакторы электростанций содержат для управления так называемые регулирующие элементы, которые могут вводиться в активную зону реактора и выводиться из нее.
Особенно критичным случаем неисправности является при этом, если один или несколько регулирующих элементов падают в активную зону реактора ошибочно (в противоположность к желаемому падению, например, при аварийном отключении). Реактор тогда больше не может оптимально управляться. В таком случае неисправности в результате получаются неблагоприятные относительно выгорания тепловыделяющего элемента плотности и распределения мощности в активной зоне реактора. Тепловыделяющие элементы при этом подвергаются опасности за счет появления пиковых значений.
Подобные случаи неисправности являются очень критичными с точки зрения работы реактора и надежности электростанции. Поэтому ошибочные падения регулирующих элементов в активную зону реактора должны быстро распознаваться, чтобы можно было своевременно предпринять подходящие контрмеры.
Принципиально падение регулирующего элемента в активную зону реактора может быть определено по воздействию на сигналы контрольно-измерительного оборудования реактора. Вследствие многочисленности регулирующих элементов и различных в зависимости от положения воздействий распознавание, однако, является непростым.
Для определения мощности и/или плотности мощности в активной зоне реактора или вне ее предусмотрено подходящее количество вертикально расположенных групп детекторов. Как правило, эти детекторы при прохождении одного или нескольких регулирующих элементов выдают каждый раз сигнал, который имеет фронт.
До сих пор на практике сигналы одной группы детекторов (на каждый регулирующий элемент или группу регулирующих элементов) вначале дифференцируют, (чтобы получить импульс) и после этого суммируют так, что имеет место общий сигнал о падении регулирующих элементов. Оказалось, что этот суммарный сигнал, однако, в частности вследствие шумов сигнала, не во всех случаях был пригодным для надежного распознавания неисправности.
Из документа US-PS 4,548,784 в связи с управлением мощности ядерного реактора известен способ регистрации падения по меньшей мере одного регулирующего элемента в активную зону реактора, при котором сигналы расположенных вдоль пути падения регулирующего элемента детекторов суммируют и подводят к устройству контроля и последующей оценки, причем к образованию суммы непосредственно примыкает образование среднего значения.
В основе изобретения лежит задача указания способа, который на основе имеющихся расположений детекторов позволяет производить улучшенное по сравнению с уровнем техники распознавание неисправности при падениях регулирующих элементов в активную зону реактора. Другая задача предусматривает указание подходящего для этого устройства.
Задача согласно изобретению решается способом регистрации падения по меньшей мере одного регулирующего элемента в активную зону реактора, при котором сигналы расположенных вдоль пути падения регулирующего элемента детекторов суммируют и подводят к устройству контроля, причем соответствующие сигналы перед суммированием задерживают с временем задержки, пропорциональным относительно времени падения, и когерентно суммируют.
Таким образом, является возможной улучшенная регистрация падения по сравнению с уровнем техники. Дело в том, что соответствующие сигналы на основании задержек когерентно суммируют, за счет чего составляющие помех и шумов частично уничтожаются или устраняются усреднением. Амплитуда суммарного сигнала тогда равна сумме отдельных сигналов так, что составляющая шума является сравнительно малой. Распознавание неисправности за счет этого является особенно надежным. Для относящихся друг к другу сигналов события создается таким образом временное совпадение.
Соответствующие времена задержки могут быть жестко заданными. За счет этого выполнение звеньев задержки является очень простым, а общие затраты низкими.
Преимущественно задержка может производиться в зависимости от соответствующей временной разницы между поступлением соответствующего сигнала и поступлением последнего сигнала. Таким образом получается задержка, которая зависит от падения регулирующего элемента. Регистрация неисправности при этом является очень точной. Время задержки может быть определено, например, из соотношения
Ti = Xn/v - Xi/v,
причем для i = 1,..., n-1
Xi и Xn означают положения соответствующих детекторов 1 - n вдоль пути падения регулирующих элементов;
Ti - времена задержки соответствующих сигналов Xi или соответственно Xn;
v - скорость падения регулирующих элементов.
Тем самым дано простое правило, по которому могут вычисляться времена задержки в звеньях задержки.
Времена задержки могут также определяться путем корреляционного анализа, за счет чего достигнуто точное совпадение сигналов.
Далее является выгодным, если соответствующее время задержки определяют в зависимости от исходного положения регулирующего элемента перед падением. Тем самым в каждом рабочем положении регулирующего элемента возможен совпадающий контроль. Таким образом, учитывается мгновенное рабочее состояние. За счет этого точно учитываются различные времена падения и тем самым достигается высокая точность при распознавании неисправности.
Выгодный вариант получается, если сигналы перед суммированием подводят к обработке пороговых значений, за счет чего суммируются только сигналы, которые превышают определенное заданное пороговое значение. Тем самым для оценки поступают только сигналы с заданной высотой сигнала, за счет чего может производиться, например, различение между быстрым вводом регулирующего элемента и падением, обусловленным неисправностью.
Сигналы при обработке пороговых значений можно с выгодой преобразовывать в двоичные сигналы, за счет чего получается возможность оценки, более простая по сравнению с аналоговой формой характера изменения сигнала, также в цифровой форме.
Созданные детекторами сигналы можно предпочтительно перед их дальнейшей обработкой также вначале дифференцировать. Таким образом вместо сигнала фронта в распоряжении имеется импульс, который позволяет более благоприятную сигнально-техническую обработку.
Альтернативное решение задачи дано согласно изобретению способом регистрации падения по меньшей мере одного регулирующего элемента в активную зону реактора, при котором сигналы детекторов, расположенных вдоль пути падения регулирующего элемента, регистрируют и подводят к устройству контроля, причем сигналы детекторов подводят к звеньям пороговых значений, двоичные выходные сигналы которых задерживают по времени таким образом, что они поступают примерно одновременно и причем задержанные двоичные выходные сигналы подводят к устройству контроля совпадения для распознавания падения регулирующего элемента. Таким образом, является возможной высоко точная регистрация неисправности, которая особенно пригодна для цифровой обработки сигналов вычислительной машиной, например, в устройстве техники управления с микрокомпьютером.
Другое решение задачи согласно изобретению дано способом регистрации падения регулирующего элемента в активную зону реактора, при котором сигналы расположенных вдоль пути падения регулирующего элемента детекторов суммируют и интегрируют, а также подводят к устройству контроля, причем интегрированный суммарный сигнал дифференцируют и затем подводят к устройству контроля. Это решение является очень простым и предлагает по сравнению с уровнем техники улучшенное распознавание неисправности и оценку сигнала.
Решение следующей задачи удается согласно изобретению устройством для осуществления вышеназванного способа с детекторами, расположенными вдоль пути падения по меньшей мере одного регулирующего элемента активной зоны реактора, которые своими сигнальными выходами соединены с общим суммирующим звеном, которое на стороне выхода подключено к устройству контроля, причем между множеством детекторов регулирующего элемента и суммирующим звеном включено звено задержки со временем задержки, пропорциональным времени падения. Этим устройством по сравнению с уровнем техники возможен совпадающий контроль сигналов, что приводит к надежному контролю неисправности в активной зоне реактора.
Является благоприятным, если между соответствующими детекторами и суммирующим звеном включено дифференцирующее звено. Таким образом, в качестве сигналов в распоряжении имеются импульсы, которые допускают благоприятную совпадающую обработку сигналов.
Между соответствующими детекторами и суммирующим звеном может быть включено звено порогового значения. Тем самым для обработки поступают только сигналы, которые однозначно происходят от падения регулирующего элемента. Дело в том, что падающие регулирующие элементы имеют высокую скорость падения, которая имеет следствием большую высоту сигнала, чем в случае нормальных перемещений регулирующих элементов. Кроме того, для альтернативного способа могут быть предусмотрены дальнейшие альтернативные устройства.
Соответствующие звенья обработки сигнала и/или устройство контроля преимущественно образованы одной или несколькими электронными вычислительными машинами с программой. Таким образом, имеется надежный контроль неисправности, который является быстрым и при необходимости может быть реализован имеющейся электронной вычислительной машиной со всеми преимуществами цифровой обработки сигнала.
Изобретение, дальнейшие детали и подробности поясняются ниже на примерах выполнения с помощью чертежей.
Фиг. 1 - 4 иллюстрируют четыре альтернативных примера выполнения в принципиальном представлении для устройств регистрации падений регулирующих элементов.
Фиг. 1 показывает первое устройство 1а, с помощью которого может быть зарегистрировано падение регулирующего элемента 3 в не показанную более подробно активную зону реактора (предпочтительная форма выполнения). Вдоль пути падения F регулирующего элемента 3 (или группы регулирующих элементов) на заданных расстояниях расположены детекторы D1 - Dn в положениях X1 - Xn. Количество и расстояния детекторов D1 - Dn зависят в основном от желаемой точности регистрации и от приемлемых затрат. Ради простоты на фигурах показаны только три детектора D1, D2 и Dn. В данном случае исключительно примерно показан образ действий на примере одного регулирующего элемента 3. Он справедлив по смыслу для нескольких регулирующих элементов 3 или для всех регулирующих элементов 3 активной зоны реактора.
Детекторы D1 - Dn могут быть выполнены самым различным образом. Например, они могут реагировать на радиоактивность, тепло, электромагнитные воздействия или на другие физические воздействия. Существенным при этом является то, что они в их месте встраивания регистрируют падение соответствующего регулирующего элемента 3 через физическое воздействие и выдают соответствующий сигнал.
В частности, можно использовать следующие известные из практики типы детектора: детекторы нейтронного потока, гамма-, бета, альфа-детекторы, измерительные зонды или термоэлементы местной температуры теплоносителя. Целесообразно для настоящей функции использовать так или иначе уже расположенные в активной зоне реактора или вне ее детекторы D1 - Dn. Это могут быть, например, детекторы D1 - Dn для определения плотности мощности. S1 - Sn обозначены на фигурах как сигналы, выдаваемые соответственно детекторами D1 - Dn.
При падении регулирующего элемента 3 сверху вниз детекторы D1 - Dn последовательно, каждый раз при прохождении регулирующего элемента 3, создают сигналы S1 - Sn с сигнальными фронтами. Фронты (фронты нарастания) сигналов S1 - Sn таким образом появляются друг после друга с временной задержкой.
Представление сигнальных фронтов сигналов S1 - Sn выбрано на фигурах в соответствии с их временной задержкой по оси времени t (пунктирно). В данном случае исходят из того, что детекторы D1 - Dn выдают одинаковый сигнал. Показанные сигналы S1 - Sn поэтому образованы в виде равных сигналов с фронтами нарастания. Другие виды сигналов, например переменные сигналы, также являются возможными.
Сигналы S1 и S2 затем задерживаются звеньями задержки V1 и V2 таким образом, что их фронты лежат примерно одновременно с фронтом сигнала Sn. Таким образом имеет место относительная задержка по сравнению с сигналом Sn. В случае n детекторов Dn детекторы D1 - Dn-1 (не показан) содержат звено задержки V1 - Vn-1 (не показано). Затем после суммирования в суммирующем звене 9 получается суммарный сигнал Sx, который имеет большой крутой фронт нарастания. Для получения лучшей возможности обработки суммарного сигнала Sx он может быть еще направлен через дифференцирующее звено DGs, так что получается импульсный суммарный сигнал Sy, который подводят затем к устройству контроля 12.
Устройство контроля 12 служит, например, для регистрации, обработки, сигнализации, неисправности или для передачи данных и выполнено в соответствии с общеизвестным уровнем техники. Оно может вызывать множество реакций на падение и является введенным в устройство управления или систему управления и защиты реактора.
За счет примерно одновременного суммирования соответствующих сигналов S1 - Sn получается значительное по сравнению с сигналами помех повышение составляющей полезного сигнала, так что имеет место улучшенная оценка. Составляющие шумов в сигнале помех при этом, по меньшей мере, частично уничтожаются, так что получается лучшая возможность распознавания падения последующим устройством контроля 12.
Время задержки в звеньях задержки V1, V2 может быть жестко задано в соответствии с местом встраивания детекторов D1 - Dn. Определение времен задержки может производиться затем с помощью опытов или на основе теоретических рассуждений. Этот образ действий может, например, реализовываться аналоговой или цифровой схемой, в частности электронно-вычислительной машиной.
Сигналы S1 - Sn могут, однако, вначале запоминаться. Соответствующее время задержки получается тогда из разницы между появлением соответствующего сигнала S1 - Sn и появлением последнего сигнала Sn. Этот образ действий является пригодным, в частности, для цифровой обработки сигнала электронно-вычислительной машиной.
Времена задержки соответствующих звеньев задержки V1 - Vn-1 (не показано) могут вычисляться, например, согласно следующему соотношению
Ti = Xn/v - Xi/v,
причем для i = 1,..., n-1
Xi и Xn означают положения соответствующих детекторов D1 или соответственно Dn вдоль пути падения регулирующих элементов 3;
Ti - времена задержки соответствующих сигналов S1 - Sn детекторов D1 - Dn в положениях Xi или соответственно Xn и
v - скорость падения соответствующего регулирующего элемента 3.
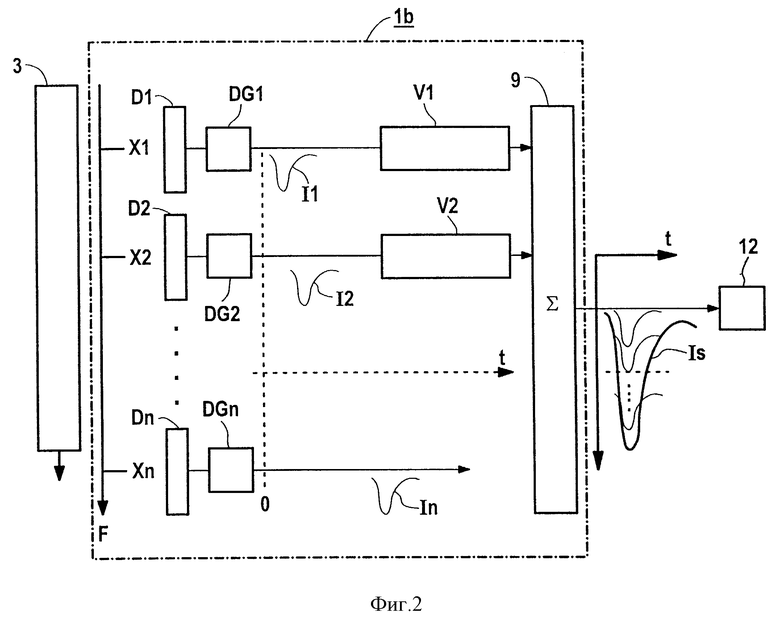
Фиг. 2 показывает второй вариант изобретения, при котором устройство 1b в каждой ветви сигнала детекторов D1 - Dn содержит дифференцирующее звено DG1 - DGn, которые включены после детекторов D1 - Dn. Фронты сигналов детекторов D1 - Dn за счет этого преобразуются в импульсы I1 - In, которые могут хорошо обрабатываться с сигнально-технической точки зрения. После суммирования получается суммарный импульс Is.
В случае выполнения 1с согласно фиг. 3 после дифференцирующих звеньев DG1 - DGn включены звенья порогового значения GG1 - GGn. Таким образом, для оценки и задержки поступают только такие сигналы, которые имеют заданную высоту. Высота при этом зависит от скорости падения. Медленно вводимый в активную зону реактора регулирующий стержень не приводит поэтому к зарегистрированному сигналу.
Выполнение 1с согласно фиг. 3 может быть также выполнено таким образом, что звенья порогового значения GG1 - GGn выдают двоичные сигналы. После задержки двоичных сигналов звеньями задержки V1 и V2 двоичные сигналы затем подводят к устройству контроля совпадения 9а. Оно производит тогда логическую проверку двоичных сигналов, за счет чего регистрируется падение регулирующего элемента 3.
Устройство контроля совпадения 9а после этого выдает на своем выходе 10 сигнал распознавания неисправности, который подводят к уже описанному выше устройству контроля 12. Выполнение 1с является, в частности, пригодным для цифровой обработки сигналов, причем выходы детекторов D1 - Dn подключены к входам устройства автоматизации с электронно-вычислительной машиной. Тогда показанные звенья обработки сигнала реализованы в рамках программного обеспечения или программ.
В частных случаях при определенных условиях может быть достаточным простая регистрация согласно фиг. 4. При этом импульсные сигналы I1 - In вначале суммируют и затем интегрируют по времени с помощью интегратора 15. За счет этого получается суммарный импульс Is, который приводит к также уже улучшенной по сравнению с уровнем техники оценке и регистрации. По выбору этот сигнал может затем еще дополнительно быть подведен к дифференцирующему звену DS, за счет чего в распоряжении имеется характерный импульс, который имеет хорошее отношение полезный сигнал/помеха.
Дополнительно также является возможным, что сигналы перед их дальнейшей обработкой проверяют в логике, чтобы распознать определенные ситуации неисправностей или чтобы предотвратить дальнейшую обработку на основе ошибочной информации. Подобная логическая проверка сигналов является также пригодной для выполнения электронно-вычислительной машиной.
Само собой разумеется, что возможными являются любые комбинации вышеназванных признаков в рамках возможностей специалиста, не выходя за пределы основного замысла настоящей идеи.


Использование: в атомной энергетике для быстрого распознавания ошибочного падения регулирующих элементов в активную зону реактора. Сущность изобретения: сигналы детекторов, расположенных вдоль пути падения элементов, задерживают таким образом, что они поступают примерно одновременно, когерентно суммируют сигналы, превышающие заданное пороговое значение, интегрируют, дифференцируют, затем подводят к устройству контроля. Устройство содержит детекторы, которые своими выходами соединены с общим суммирующим звеном, подключенным к устройству контроля. Между ними включены звено задержки, дифференцирующее звено, звено порогового значения, образованные одной или несколькими ЭВМ с программой. 4 с. и 10 з.п.ф-лы, 4 ил.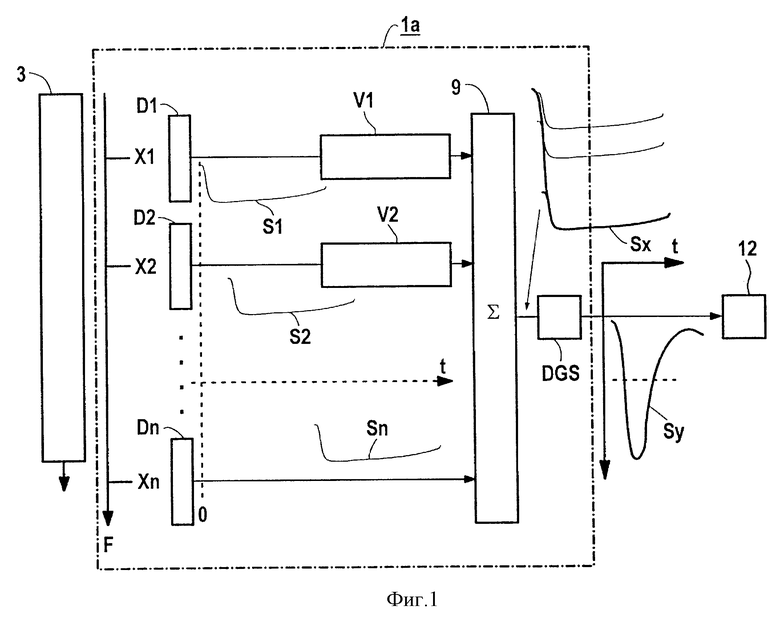
| US 4548784 A, 22.10.1985 | |||
| SU 1489467 A1, 20.03.1996 | |||
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ОРГАНА РЕГУЛИРОВАНИЯ ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2038571C1 |
| GB 1282787 A, 26.07.1972 | |||
| US 4014741 A, 29.03.1977 | |||
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |

