Изобретение относится к области микроробототехники, предназначено для захвата запыленных, шероховатых, пористых и имеющих сложный рельеф поверхностей (с трещинами, щелями, отверстиями и т.д.) с реализацией механизма плавного регулирования и может быть использовано либо для автоматизированной подачи с помощью микроманипулятора деталей в рабочую зону технологических микромашин без использования дополнительных пневматических блоков, либо в конструкциях мобильных микросистем, автономных от внешних источников вакуума и способных передвигаться по свободно-ориентированным в пространстве поверхностям.
Известен вакуумный захват для удержания, транспортирования и последующей укладки деталей, имеющих плоские или плоские с отверстиями поверхности. Устройство содержит корпус с рабочей полостью, связанной с вакуумным насосом. В рабочей полости расположены пружины, размещенные между направляющими корпуса и направляющими плоского диска, расположенного параллельно плоскости губок и на расстоянии от нее. Упругий элемент может быть выполнен также в виде сильфона, расположенного между корпусом и диском с образованием дополнительной камеры [патент РФ №2043193, кл. B 25 J 15/06, B 25 J 15/00, 1995].
Недостатком данного устройства является функциональное ограничение на захват поверхностей со сложным рельефом, в частности с трещинами, превышающими по длине размеры основания корпуса или плоского диска. Кроме того, следует отметить, что работа рассматриваемого устройства возможна только при наличии внешнего источника вакуума, а это приводит либо к увеличению таких эксплутационных характеристик, как габариты и масса, либо к необходимости использовать дополнительные пневматические линии связи. И то другое к тому же ограничивает возможность работы вакуумного захвата в составе мобильных микросистем, например в микророботах, передвигающихся по свободно-ориентированным в пространстве поверхностям.
Также известен вакуумный захват для удержания, манипулирования и транспортирования штучных грузов, преимущественно с грубой и шероховатой поверхностью. Вакуумный захват содержит корпус с уплотнительной манжетой, центральную вакуумную камеру и периферийную кольцевую полость, в которой установлены концентрично друг к другу эластичные пленки с фрикционными свойствами, уровень расположения контактных кромок которых находится ниже контактной поверхности уплотнительной манжеты [патент РФ №2035376, кл. В 66 С 1/02, 1995].
Основным недостатком данного устройства является функциональное ограничение на захват деталей, поверхности которых имеют сложный рельеф, в частности с отверстиями, трещинами и т.д. Кроме того, для работы вакуумного захвата также необходим дополнительный пневматический блок в виде источника вакуума, а это связано также с уже описанными выше ограничениями.
К наиболее близкому по технической сущности к заявляемому изобретению можно отнести предназначенное для захвата плоских деталей и поверхностей автономное вакуумное захватное устройство для микроробота, содержащее источник вакуума и систему вакуумного присоса в виде пневмоприсоски. В качестве источника вакуума использован собственный источник вакуума, выполненный в виде пневматического пьезонасоса, состоящего из деформируемого элемента в виде силового пьезокристалла и эластичного элемента конструкции, который выполнен в виде цилиндра из эластичного материала. При этом в основной полости пневматического пьезонасоса установлены клапанные пьезоэлектрические механизмы в виде первого и второго клапанов, которые представляют собой первый и второй распределительные пьезокристаллы, расположенные между основной полостью пневматического пьезонасоса и соответственно внешней полостью пневматического пьезонасоса, то есть атмосферой, и полостью пневмоприсоски [патент РФ № 2210493, кл. B 25 J 15/06, B 25 J 7/00, 2003].
Главным недостатком прототипа является то, что он не может быть использован для захвата пористых и шероховатых поверхностей, а также поверхностей с трещинами, щелями, отверстиями, выбоинами и т.д. Кроме того, в захватном устройстве система каналов и клапанов источника вакуума непосредственно взаимодействует с окружающей средой. Поэтому если поверхность базирования является агрессивной или с неблагоприятными условиями, например запыленной, влажной, загрязненной и т.д., то это может негативно сказаться на стабильности работы источника вакуума, в частности, вызывая сбои в работе клапанных механизмов, пневматических каналов, пьезоэлектрических преобразователей и др. К тому же, при использовании прототипа в составе мобильной микросистемы недостаточная площадь соприкосновения между кромками системы вакуумного присоса и поверхностью базирования приводит к относительно малым по величине фрикционным усилиям и, как следствие, к низкой надежности удержания микроробота на наклонных и вертикальных поверхностях.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей за счет захвата запыленных, пористых, шероховатых и имеющих сложный рельеф поверхностей, например с трещинами, щелями, отверстиями, выбоинами и т.д., и возможности регулирования коэффициента разрежения/нагнетания пневматического пьезонасоса, что позволит изменять в более широком диапазоне основные характеристики устройства.
Решение поставленной задачи достигается тем, что в вакуумном захватном устройстве микроробота, содержащем систему вакуумного присоса, собственный источник вакуума, выполненный в виде пневматического пьезонасоса с двумя клапанными пьезоэлектрическими механизмами, первый из которых связывает основную полость пневматического пьезонасоса с атмосферой, в отличие от прототипа, дополнительно содержится камера высокого давления, связанная с основной полостью пневматического пьезонасоса вторым клапанным пьезоэлектрическим механизмом, причем основная полость пневматического пьезонасоса выполнена в виде полого пьезоэлектрического преобразователя, а система вакуумного присоса образована несколькими рядами пневматических присосок, у каждой из которых на кромках соприкосновения с поверхностью базирования выполнены эластичные манжеты с высокими фрикционными и адгезионными свойствами, причем полости присосок связаны с камерой высокого давления через упругие воздухонепроницаемые мембраны, а в основной полости пневматического пьезонасоса на одной из стенок содержится решетчатая конструкция с помещенным внутри нее цилиндром из эластичного материала.
В данном изобретении цилиндр из эластичного материала способен расширяться (как надувной шар) при заполнении воздухом. Решетчатая конструкция ограничивает расширение цилиндра из эластичного материала при надувании, но в то же время не препятствует проходу воздуха.
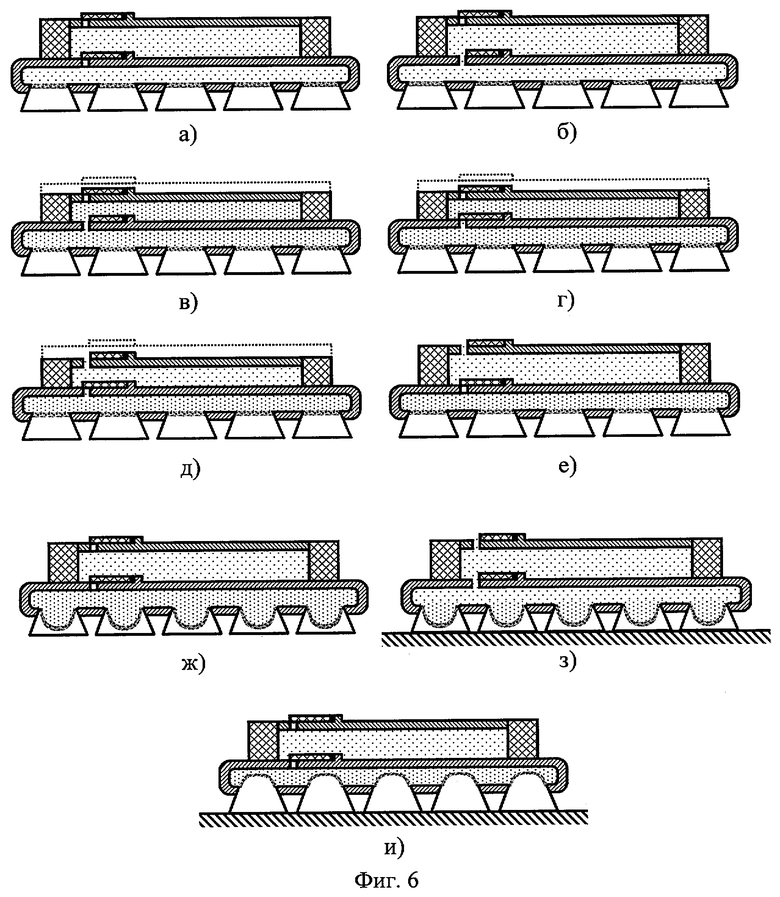
На фиг.1 представлена конструкция вакуумного захватного устройства микроробота (фиг.1а - вид спереди, поперечный разрез; фиг.1б - вид сбоку); на фиг.2а и фиг.2б - соответственно вид сверху и снизу вакуумного захватного устройства микроробота; на фиг.3 - регулирование давления пневматического пьезонасоса: а), б), в), г) - этапы растяжения цилиндра из эластичного материала внутри решетчатой конструкции; на фиг.4 - последовательность управляющих импульсов, подаваемых на клапанные пьезоэлектрические механизмы и пьезоэлектрический преобразователь полой цилиндрической формы; на фиг.5 - пьезоэлектрический преобразователь полой цилиндрической формы, работающий на растяжение-сжатие; на фиг.6 - работа клапанных пьезоэлектрических механизмов и пьезоэлектрического преобразователя полой цилиндрической формы.
Вакуумное захватное устройство микроробота (фиг.1 и фиг.2) содержит собственный источник вакуума, выполненный в виде пневматического пьезонасоса 1, камеру высокого давления 2, систему вакуумного присоса 3, первый 4 и второй 5 клапанные пьезоэлектрические механизмы, связывающие основную полость 6 пьезонасоса 1 соответственно с атмосферой через канал 7 и с камерой высокого давления 2 через канал 8. Основная полость 6 пневматического пьезонасоса 1 выполнена в виде пьезоэлектрического преобразователя 9 полой цилиндрической формы, а система вакуумного присоса 3 образована несколькими рядами пневматических присосок 10, у каждой из которых на кромках 11 соприкосновения с поверхностью базирования выполнены эластичные манжеты с высокими фрикционными и адгезионными свойствами, причем полости присосок 10 связаны с камерой высокого давления 2 через воздухонепроницаемые упругие мембраны 12. Решетчатая конструкция 13 с цилиндром из эластичного материала 14 расположена внутри основной полости 6 пневматического пьезонасоса 1.
Вакуумное захватное устройство микроробота работает следующим образом.
Основой реализации захвата, удержания и отсоединения от поверхности базирования служит собственный источник вакуума на основе пьезоэлектрических исполнительных устройств и цилиндра из эластичного материала 14. На пьезоэлектрические исполнительные устройства подаются управляющие импульсы, вызывающие такую последовательность деформаций первого 4 и второго 5 клапанных пьезоэлектрических механизмов, пьезоэлектрического преобразователя 9 полой цилиндрической формы, что в полостях присосок 10 через систему пневматической связи, образованную камерой 2 высокого давления и воздухонепроницаемыми упругими мембранами 12, создается либо разрежение, при котором происходит захват и удержание, либо избыточное давление, при котором происходит отсоединение от поверхности базирования. Давление в основной полости 6 пневматического пьезонасоса 1 можно регулировать путем изменения размера цилиндра из эластичного материала 14: в полость цилиндра из эластичного материала 14 подается извне воздух, вызывая его расширение (процесс подачи и выпускание воздуха не рассматриваем), при выпускании воздуха - он сжимается.
При контроле размера цилиндра из эластичного материала (фиг.3) можно контролировать и давление в основной полости, а это в свою очередь дает возможность регулировать силу захвата поверхности.
Рассмотрим принцип работы собственного источника вакуума захватного устройства на основе пьезоэлектрических исполнительных устройств.
Прямоугольные управляющие импульсы U1, U2, U3 (фиг.4) подаются соответственно на первый 4 и второй 5 клапанные пьезоэлектрические механизмы, на пьезоэлектрический преобразователь 9 полой цилиндрической формы. Под действием высокого и низкого уровней сигналов клапанные пьезоэлектрические механизмы соответственно либо связывают, либо перекрывают первым 4 механизмом канал 7, связывающий основную полость 6 пневматического пьезонасоса 1 с атмосферой, и вторым 5 механизмом канал 8, связывающий основную полость 6 пневматического пьезонасоса с камерой высокого давления 2. А пьезоэлектрический преобразователь 9 полой цилиндрической формы деформируется, изменяя свою высоту (фиг.5): при подаче напряжений - удлиняется (растягивается), при снятии - укорачивается (сжимается) со значительными тяговыми усилиями.
Рассмотрим основные этапы нагнетания пневматическим пьезонасосом 1 сжатого воздуха в камеру 2 высокого давления. В начальный момент времени в основной полости 6 пневматического пьезонасоса 1 и камере 2 установлено атмосферное давление, клапанные пьезоэлектрические механизмы 4 и 5 перекрывают каналы 7 и 8, а пьезоэлектрический преобразователь 9 полой цилиндрической формы находится в состоянии деформации растяжения (фиг.6а). В момент времени t1 снимается высокий уровень сигнала U2, что приводит к открытию второго 5 пьезоэлектрического клапанного механизма (фиг.6б). В момент времени t2 снимается импульс U3 с пьезоэлектрического преобразователя 9 полой цилиндрической формы, что вызывает его деформацию сжатия, а это, в свою очередь, создает в основной полости 6 пневматического пьезонасоса 1 и камере 2 избыточное давление (фиг.6в). В момент времени t3 подается напряжение U2 на второй 5 пьезоэлектрический клапанный механизм, что приводит к перекрытию канала 8 (фиг.6г). В момент времени t4 снятием импульса U1 давление в основной полости 6 пневматического пьезонасоса 1 выравнивается с атмосферным, а давление в камере 2 остается повышенным, поскольку канал 8 перекрыт (фиг.6д). В момент времени t5 сигналом U3 пьезоэлектрический преобразователь 9 полой цилиндрической формы вновь переводится в состояние деформации растяжения (фиг.6е). В момент t6 напряжением U1 перекрывается канал 7. Далее последовательность этапов t1...t6 работы пневматического пьезонасоса 1 циклически повторяется, что позволяет усилить давление в камере 2, поскольку каждый раз в нее дополнительно нагнетается сжатый воздух.
При заполнении воздухом цилиндр из эластичного материала 14 расширяется (фиг.3), объем основной полости 6 уменьшается на величину объема наполненного воздухом цилиндра из эластичного материала и, следовательно, давление в ней увеличивается, что позволяет уменьшить число этапов t1...t6 работы пневматического пьезонасоса, увеличить его быстродействие.
Аналогичным образом в камере 2 создается разрежение, которое в зависимости от общего числа полных циклов может быть вплоть до вакуума, а отличия будут связаны только с другой последовательностью открытий-перекрытий каналов 7 и 8. При сжатии (выпускании воздуха) цилиндра из эластичного материала 14 объем основной полости 6 увеличивается, что создает разрежение.
Таким образом, регулированием общего числа этапов t1...t6 и величины объема, занимаемого цилиндром из эластичного материала 14, можно устанавливать необходимый уровень давления в камере 2.
Далее рассмотрим непосредственно реализацию операций захвата и отсоединения от поверхности базирования.
При нагнетании пневматическим пьезонасосом 1 сжатого воздуха в камеру 2 высокого давления упругие воздухонепроницаемые мембраны 12 подвергаются одновременно деформациям изгиба и растяжения (фиг.6ж), величина которых зависит от уровня давления в камере 2 и модуля упругости материала, из которого выполнены мембраны 12. В таком положении вакуумное захватное устройство ориентируется и прижимается к поверхности базирования. Затем одновременным открытием каналов 7 и 8 в камере 2 высокого давления устанавливается атмосферное давление (фиг.6з), что вызывает, во-первых, мгновенное распрямление мембран 12 под действием сил упругости и, во-вторых, создание разрежения в полостях пневматических присосок 10 и захват поверхности базирования. При этом пыль, имеющаяся на участках соприкосновения поверхности базирования и кромок 11 пневматических присосок 10, со струей воздуха всасывается в полости присосок 10, что в последующем обеспечит лучшую герметизацию на участках соприкосновения. Кроме того, эластичные манжеты на кромках 11 присосок 10 с высокими фрикционными и адгезионными свойствами, выполненные из таких синтетических полимеров, как полиуретан, эластан, пербунан или силикон, обеспечивают герметизацию при контактах с шероховатыми и пористыми поверхностями.
Затем при сжатии (выпускании воздуха) цилиндра из эластичного материала 14 в полости 6 происходит разрежение, что приводит, во-первых, вновь к деформациям изгиба и растяжения упругих воздухонепроницаемых мембран 12, но уже в противоположенном направлении и, во-вторых, как следствие из этого, к еще большему разрежению в полостях пневматических присосок 10, а значит и к большей надежности захвата поверхности базирования.
В дальнейшем пневматическим пьезонасосом 1 для усиления эффекта - более надежного удержания поверхности базирования в камере 2 - создается вакуум, что приводит, во-первых, вновь к деформациям изгиба и растяжения упругих воздухонепроницаемых мембран 12, но уже в противоположенном направлении (фиг.6и) и, во-вторых, как следствие из этого, к еще большему разрежению в полостях пневматических присосок 10, а значит и к большей надежности захвата поверхности базирования. Следует отметить, что в полостях тех присосок, которые окажутся над трещинами, щелями, отверстиями и т.д., установится атмосферное давление, а поскольку пневматическая связь с камерой 2 осуществляется через воздухонепроницаемые мембраны 12, то на работе других присосок, надежно удерживающих поверхность базирования, это никак не скажется.
Наличие воздухонепроницаемых мембран 12 изолирует систему каналов и клапанов пневматического пьезонасоса 1 от взаимодействия с окружающей средой. Поэтому если поверхность базирования является агрессивной или с неблагоприятными условиями, например запыленной, влажной, загрязненной и т.д., то это никак не скажется на стабильности работы источника вакуума, в частности надежно будут работать клапанные механизмы, пневматические каналы, пьезоэлектрические преобразователи и т.д.
Для отсоединения от поверхности базирования достаточным является установление в камере 2 атмосферного давления, либо для более надежного отсоединения - избыточного давления.
В отличие от прототипа в заявляемом изобретении значительно больше площадь контакта между системой вакуумного присоса захватного устройства и поверхностью базирования, следовательно, больше фрикционные силы и больше надежность удержания микроробота на наклонных и вертикальных поверхностях. Малая масса и габариты вакуумного захватного устройства микроробота, так же как и в прототипе, обеспечиваются использованием миниатюрных, но в то же время обладающих значительной мощностью пьезоэлектрических исполнительных устройств, выполненных, например, на основе барий-титановых или цирконат-титановых пьезокристаллов. За счет надувания цилиндра из эластичного материала 14 и последующего сжатия (выпускания воздуха) легче обеспечить захват и отсоединение от поверхности базирования. Также регулирование величины занимаемого объема цилиндра из эластичного материала позволяет контролировать силу захвата поверхности.
Таким образом, заявляемое изобретение обеспечивает расширение функциональных возможностей, связанных с захватом запыленных, пористых, шероховатых и имеющих сложный рельеф поверхностей, например с трещинами, щелями, отверстиями, выбоинами и т.д., дает возможность регулирования коэффициента разрежения/нагнетания пневматического пьезонасоса, контроля силы захвата поверхности базирования, и, как в прототипе, сохранение небольшой массы и габаритов и использование собственного источника вакуума позволяет использовать заявляемое устройство в составе мобильных микросистем, например в микророботах, способных передвигаться по свободно-ориентированным в пространстве поверхностям.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2004 |
|
RU2266810C1 |
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2210493C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРООБЪЕКТАМИ, ИЗГОТОВЛЕННЫМИ ИЗ ЭЛЕКТРОПРОВОДНИКОВЫХ МАТЕРИАЛОВ | 2009 |
|
RU2423223C1 |
| НАНОСТРУКТУРНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОМАНИПУЛЯТОРА | 2006 |
|
RU2331505C1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| ПЛИТА ДОРОЖНОГО ПОКРЫТИЯ, СПОСОБ ЕЕ УКЛАДКИ И КАМЕРА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2278919C1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| Вакуумный захват | 2022 |
|
RU2794665C1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |




Изобретение относится к области микроробототехники и предназначено для захвата запыленных, шероховатых, пористых и имеющих сложный рельеф поверхностей: с трещинами, щелями, отверстиями, с реализацией механизма плавного регулирования. Захватное устройство содержит систему вакуумного присоса в виде нескольких рядов пневматических присосок, собственный источник вакуума, выполненный в виде пневматического пьезонасоса с двумя клапанными пьезоэлектрическими механизмами, первый из которых связывает основную полость пневматического пьезонасоса с атмосферой. Устройство дополнительно содержит камеру высокого давления, связанную с основной полостью пневматического пьезонасоса вторым клапанным пьезоэлектрическим механизмом. Причем основная полость пневматического пьезонасоса выполнена в виде полого пьезоэлектрического преобразователя. У каждой из пневматических присосок на кромках соприкосновения с поверхностью базирования выполнены эластичные манжеты с высокими фрикционными и адгезионными свойствами. Полости пневмоприсосок связаны с камерой высокого давления через упругие воздухонепроницаемые мембраны. В основной полости пневматического пьезонасоса установлена решетчатая конструкция, с помещенным внутри нее цилиндром из эластичного материала. Изобретение позволит регулировать коэффициент разрежения/нагнетания пневматического пьезонасоса и контролировать силу захвата поверхности базирования. 6 ил.
Вакуумное захватное устройство микроробота, содержащее систему вакуумного присоса, собственный источник вакуума, выполненный в виде пневматического пьезонасоса с двумя клапанными пьезоэлектрическими механизмами, первый из которых связывает основную полость пневматического пьезонасоса с атмосферой, отличающееся тем, что дополнительно содержит камеру высокого давления, связанную с основной полостью пневматического пьезонасоса вторым клапанным пьезоэлектрическим механизмом, причем основная полость пневматического пьезонасоса выполнена в виде полого пьезоэлектрического преобразователя, а система вакуумного присоса образована несколькими рядами пневматических присосок, у каждой из которых на кромках соприкосновения с поверхностью базирования выполнены эластичные манжеты с высокими фрикционными и адгезионными свойствами, причем полости пневмоприсосок связаны с камерой высокого давления через упругие воздухонепроницаемые мембраны, а в основной полости пневматического пьезонасоса установлена решетчатая конструкция с помещенным внутри нее цилиндром из эластичного материала.
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2210493C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2035376C1 |
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

