Изобретение относится к дорожному строительству, а именно к проведению инженерных изысканий автомобильных дорог на стадии рабочей документации в полосе отвода автомобильной дороги.
Известен способ инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог, включающий последовательное выполнение по длине трассы нивелировочных работ по оси трассы в каждой пикетажной и характерной (переломы рельефа, пересечения водотоков, пересечения существующих дорог, ЛЭП, ЛС, трубопроводов и других коммуникаций) точках и в поперечном направлении в каждой пикетажной и характерной точке на участках перелома рельефа, выполнение буровых и шурфовых работ (с фиксацией положения уровня грунтовых вод) на глубину не менее чем 2 м ниже поверхности земли с расстоянием между выработками не более 200...500 м (Проектирование автомобильных дорог: Справочник инженера-дорожника / Под ред. Г.А. Федотова, М.: Транспорт, 1989, - С. 14-33, 77-79).
Недостатками данного способа являются большая трудоемкость работ в определении грунтово-гидрогеологических условий в полосе отвода автомобильной дороги, получение недостаточной исходной информации как в продольном, так и в поперечном направлении по рельефу и грунтово-гидрогелоогическим условиям, приводящей к погрешностям при определении объемов земляных работ, прогнозировании уровня грунтовых вод на участках между выработками и низкой точности в расчете объемов работ при продольном перемещении грунта из выемки в насыпь.
Другим способом инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог является способ, включающий последовательное движение (от начального пункта трассы к конечному) вездехода с грунтовым георадаром поперек полосы варьирования трассы (расстояние между поперечными шагам 50...300 м) с использованием спутниковой системы GPS с P-кодовым приемником ASHTECH P-12, установленным на вездеходе [Патент N 2109872 Российская Федерация. Способ инженерных грунтово-гидрологических изысканий автомобильных дорог. А.М. Кулижников, Т.А. Метла, Б.И. N 12, 1998 г.].
Недостатком известного способа являются большие трудозатраты, вызванные большим количеством поворотов при использовании способа в пределах полосы отвода автомобильной дороги (30...100 м), нарушение экологического равновесия из-за повреждения почвенно-растительного слоя на поворотах, недостаточная плотность исходной информации для расчета объемов земляных работ при расстоянии между поперечными шагами 50...300 м.
Наиболее близким к предлагаемому способу по технической сущности является способ инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог, включающий продольное передвижение вездехода с георадаром и спутниковой системой позиционирования, осуществляющей определение пространственных координат и грунтово-гидрогеологической информации, при этом георадар проходит от начального до конечного пункта по оси трассы, границам полосы отвода и по середине левой и правой половины полосы отвода, при этом повороты осуществляются только в начале и конце трассы [Охрана окружающей среды и рациональное использование природных ресурсов. Сборник научных трудов, вып. IV, Архангельск, 1998 г. - С. 59-65].
Недостатками данного способа являются низкая производительность труда при сборе инженерно-геологической информации, значительные трудозатраты на разбивку маршрута георадара, особенно на криволинейных участках трассы, требующие установки большого количества ориентиров, частая потеря ориентации по длине маршрута, например, при прохождении параллельно оси трассы протяженностью 5...10 км; снижение качества сбора исходной геологической информации из-за изменения прохождения сигнала (свойств грунтов) при возвращении на следующие сутки к началу маршрута в связи с переменной природно-климатических условий (инфильтрация воды и промерзание грунтов), а также снижение качества сбора исходной информации за счет невозможности регистрации пространственных координат в характерных точках рельефа.
Задача изобретения - повышение производительности труда и качества сбора исходной топографо-геологической информации, снижение трудозатрат на разбивку маршрута георадара, облегчение ориентаций на маршруте.
Задача решается за счет того, что в способе инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог, включающем продольное передвижение вездехода с георадаром и спутниковой системой позиционирования, осуществляющей определение пространственных координат и грунтово-гидрогеологической информации, согласно изобретению, георадар последовательно перемещают по оси трассы и границам полосы отвода и осуществляют сбор исходной информации о рельефе в поперечном направлении только при прохождении по оси трассы, причем трассу разбивают на отрезки, длину s которых определяют на криволинейных участках в зависимости от допускаемого отклонения от оси трассы и ширины полосы отвода по формуле:
s = (1-0,18 • B + 0,1 • R • B)0,5,
где s - шаг движения георадара на криволинейном участке, м;
R - радиус кривой поворота, м;
B - ширина полосы отвода, м,
а на прямолинейных участках - в зависимости от условий видимости трассы; при этом между двумя смежными поперечными проходами георадара выдерживают расстояние, равное расстоянию между двумя опорными точками t, которое определяют по формуле:
t = 30 - 5 • Δ h,
где Δ h - перепад высот на 50 пог. м длины маршрута, м.
Технический результат, обеспечиваемый изобретением, состоит в повышении производительности труда и качества сбора исходной топографо-геологической информации, снижении трудозатрат на разбивку маршрута георадара и облегчении ориентации на маршруте.
На чертеже приведена схема маршрута георадара с антенной при выполнении инженерных изысканий.
Способ инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог включает продольное передвижение вездехода с георадаром типа "Эхо" с антенной A4 (частота 200 МГц) и приемником спутниковой системы позиционирования ASHTECH P-12, и осуществляется следующим образом: в осенний или весенний период при отсутствии листвы на деревьях предварительно выполняют прорубку и провешивание оси трассы на отрезке s, например длиной 300 м на прямолинейном участке и длиной 160 м на криволинейном участке радиусом 1000 м и шириной полосы отвода 50 м. Георадар передвигают по оси трассы от начала до конца прямолинейного отрезка (протяженностью 300 м), фиксируя в опорных точках 1 координаты и грунтово-гидрогеологический разрез, при этом устанавливают ориентиры будущих параллельных проходов георадара в точках 3 как слева, так и справа от оси, а также выполняют съемку поперечных профилей, расположенных перпендикулярно оси трассы, в характерных точках рельефа 2 осуществляют сбор исходной информации о рельефе в поперечном направлении с помощью приемника спутниковой системы ASHTECH P-12 или электронного тахеометра (например, Eita R 50); затем георадар возвращают к началу отрезка по одной из границ полосы отвода (например, правой) и по другой границе полосы отвода (например, левой) возвращают в конец отрезка. Во избежание повторений прохождения георадара по одним и тем же поперечным проходам (конец i-го отрезка и начало i+1-го) устанавливают между двумя смежными поперечными проходами расстояние, равное расстоянию между двумя опорными точками t, равное 15 м при перепаде высот 3 м на 50 пог. м. При прохождении георадара в точках установки ориентиров 3 по границам полосы отвода производят съемку грунтово-гидрогеологического разреза. При этом пока на данном участке трассы выполняют инженерные изыскания, производят прорубку и провешивание оси следующего отрезка, например, расположенного на криволинейном участке трассы длиной 160 м. Вездеход передвигают на второй отрезок трассы, где повторяют выше приведенные операции, при возвращении к началу второго отрезка вездеход не доводят по границе полосы отвода на расстояние, равное расстоянию между двумя опорными точками t = 15 м, а перемещают его в поперечном направлении.
Повышение производительности труда при сборе топографогеологической информации осуществляется за счет сокращения протяженности маршрута георадара.
Снижение трудозатрат на разбивку маршрута георадара происходит из-за того, что отпадает необходимость одновременного провешивания всей трассы, так как движение по трассе происходит постепенно (по участкам) и провешивается сначала первый отрезок, затем второй и так далее. Например, при снятии поперечных профилей на прямолинейном участке способом, принятым за прототип, через каждые 20 м на трассе длиной 1 км необходимо проставить одновременно 150 ориентиров (вешек), а при проходе этой же трассы по 3 участка (например, по 300 м) необходимо проставить всего лишь 45 ориентиров (вешек). Если же участок будет криволинейный, то количество опорных точек увеличится, что приведет к еще большим трудозатратам.
При прохождении трассы по криволинейным участкам способом, принятым за прототип, возникает большая вероятность того, что при возвращении георадара от конца трассы к началу будут возникать трудности с восстановлением параллельного маршрута, а также могут быть потеряны ориентиры (вешки), что потребует дополнительных затрат времени на их восстановление. При заявленном способе прохода по трассе не потребуется дополнительного времени на обнаружение и восстановление ориентиров.
Ориентация на маршруте улучшается за счет прохода по коротким отрезкам трассы, так как на коротком отрезке трассы легко обеспечить визуальную видимость как в продольном, так и в поперечном направлении на протяжении всего этого участка.
Качество сбора исходной геологической информации повышается, так как короткий отрезок местности георадар проходит полностью (и в прямом и в обратном направления) за небольшой период времени, в течение которого природно-климатические условия сильно не изменятся, то есть геологическая информация на протяжении всего отрезка будет однородна, а также повышение качества сбора исходной информации о рельефе за счет получения пространственных координат в характерных точках рельефа.
Выполнение инженерных изысканий предлагаемым способом позволяет повысить надежность вычисления объемов земляных работ по модели рельефа полосы отвода автомобильной дороги, надежность распределения земляных масс на основе учета пространственного размещения подстилающих слоев грунта по модели геологического строения местности, избежать ошибок при проектировании продольного профиля на основе информации по пространственному расположению уровня грунтовых вод по гидрогеологической модели местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЖЕНЕРНЫХ ГРУНТОВО-ГИДРОЛОГИЧЕСКИХ ИЗЫСКАНИЙ АВТОМОБИЛЬНЫХ ДОРОГ | 1996 |
|
RU2109872C1 |
| Способ мониторинга уровня грунтовых вод в лесном массиве | 2022 |
|
RU2801434C1 |
| УСТРОЙСТВО ГЕОРАДИОЛОКАЦИОННОЙ ОЦЕНКИ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТОВ | 2010 |
|
RU2419110C1 |
| ГЕОРАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТОВ | 2010 |
|
RU2416116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ДЛИНЫ ТРАССЫ АВТОМОБИЛЬНОЙ ДОРОГИ | 1999 |
|
RU2164972C2 |
| АВТОМОБИЛЬНАЯ ДОРОГА | 2014 |
|
RU2589138C2 |
| СПОСОБ ГЕОРАДИОЛОКАЦИИ МНОГОЛЕТНЕМЕРЗЛЫХ ПОРОД | 2011 |
|
RU2490671C2 |
| Способ обнаружения границы локального подземного торфяного пожара и робот для проведения разведки подземных торфяных пожаров | 2016 |
|
RU2625602C1 |
| СПОСОБ КОМПЛЕКСНОГО ОБСЛЕДОВАНИЯ ЗЕМЛЯНОГО ПОЛОТНА ЖЕЛЕЗНЫХ ДОРОГ | 2008 |
|
RU2380472C2 |
| СПОСОБ МОНИТОРИНГА АВТОМОБИЛЬНОЙ ДОРОГИ | 2002 |
|
RU2226673C2 |
Изобретение относится к дорожному строительству и может быть использовано при проведении инженерных изысканий автомобильных дорог на стадии рабочей документации в полосе отвода автомобильной дороги. Способ включает продольное передвижение вездехода с георадаром и спутниковой системой позиционирования, осуществляющей определение пространственных координат и грунтово-гидрогеологичскую информацию. Новым является то, что георадар последовательно перемещают по оси трассы и границам полосы отвода и осуществляют сбор исходной информации о рельефе в поперечном направлении только при прохождении по оси трассы, которую разбивают на отрезки, длину s которых определяют на криволинейных участках по приведенной зависимости от допускаемого отклонения от оси трассы и ширины полосы отвода, а на прямолинейных - в зависимости от расстояния видимости, при этом между двумя смежными поперечными проходами георадара выдерживают расстояние, равное расстоянию между двумя опорными точками t, которое определяют также по приведенной зависимости. Технический результат, обеспечиваемый изобретением, состоит в повышении надежности вычисления объемов земляных работ, избежании ошибок при проектировании продольного профиля на основе информации по пространственному расположению уровня грунтовых вод по гидрогеологической модели местности. 1 ил.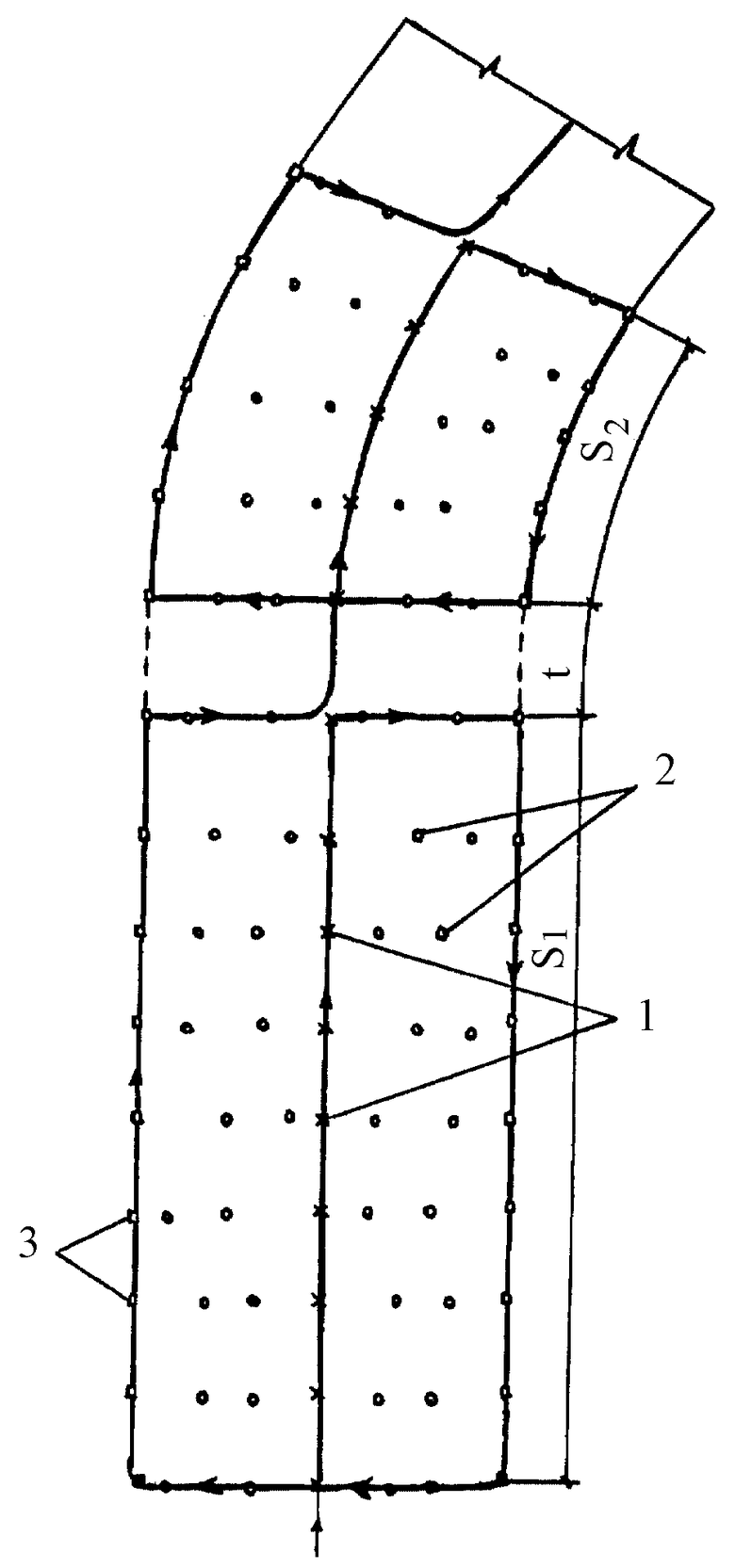
Способ инженерных изысканий на стадии рабочей документации в полосе отвода автомобильных дорог, включающий продольное передвижение вездехода с георадаром и спутниковой системой позиционирования, осуществляющей определение пространственных координат и грунтово-гидрогеологической информации, отличающийся тем, что георадар последовательно перемещают по оси трассы и границам полосы отвода и осуществляют сбор исходной информации о рельефе в поперечном направлении только при прохождении по оси трассы, причем трассу разбивают на отрезки, длину s которых определяют на криволинейных участках в зависимости от допускаемого отклонения от оси трассы и ширины полосы отвода по формуле
s = (1 - 0,18 • B + 0,1 • R • B)0,5,
где s - шаг движения георадара на криволинейном участке, м;
R - радиус кривой поворота, м;
B - ширина полосы отвода, м,
а на прямолинейных - в зависимости от расстояния видимости, при этом между двумя смежными поперечными проходами георадара выдерживают расстояние, равное расстоянию между двумя опорными точками t, которое определяют по формуле
t = 30-5xΔh,
где Δh - перепад высот на 50 пог. м длины маршрута, м.
| Охрана окружающей среды и рациональное использование природных ресурсов: сборник научных трудов, вып | |||
| IV | |||
| - Архангельск, 1998, с.59-65 | |||
| СПОСОБ ИНЖЕНЕРНЫХ ГРУНТОВО-ГИДРОЛОГИЧЕСКИХ ИЗЫСКАНИЙ АВТОМОБИЛЬНЫХ ДОРОГ | 1996 |
|
RU2109872C1 |
| ПЕРЕХОДОВ А.В | |||
| Методы изысканий автомобильных дорог на полосе варьирования с использованием радиолокационного зондирования грунта: Диссертация на соискание ученой степени кандидат технических наук | |||
| - Москва, МАДИ, 1989, с.75-77 | |||
| ФЕДОТОВ Г.А | |||
| Проектирование автомобильных дорог: Справочник инженера - дорожника | |||
| - М.: Транспорт, 1989, с.77-79. | |||
