Изобретение относится к дорожному строительству и предназначено для проведения инженерных грунтово-гидрологических изысканий автомобильных дорог в широкой полосе варьирования трассы под системное автоматизированное проектирование автомобильных дорог.
Известен способ инженерных грунтово-гидрологических изысканий автомобильных дорог, включающий прокладку по топографической карте трассы будущей автомобильной дороги, проложение и прорубку трассы на местности, проведение по проложенному направлению инженерных грунтово-гидрологических изысканий с помощью механического бурения, рытья шурфов и прикопок [1].
Недостатками данного способа являются выбор не оптимального варианта трассы автомобильной дороги, так как грунтово-гидрологические условия трассы не являются самыми благоприятными и определены ее проложением на топографической карте в зависимости от рельефа и ситуации местности; а также потребуются большие затраты ручного труда по рытью шурфов и прикопок.
Наиболее близким к предлагаемому по технической сущности является способ инженерных грунтово-гидрологических изысканий автомобильных дорог, включающий установление в камеральных условиях границы полосы варьирования трассы, достигающей до 1/3 ее длины, определение в камеральных условиях маршрута движения вездехода со станцией C-023, разбивку маршрута (при помощи теодолита намечают два створа, которые располагают параллельно основному направлению трассы автомобильной дороги, далее, начиная с начальной точки трассирования, через каждые 500 м намечают поперечные створы), установку ориентиров (разбивочные скважины, расположенные как на поперечниках, так и на продольных створах отмечают вешками высотой 2 - 3 м, к которым привязываются флажки яркого цвета) и вырубку леса по маршруту движения вездехода, сбор информации по грунтово-гидрологическим условиям местности при прохождении вездехода со станцией C-023 с замером грунтово-гидрологических условий в точках пересечения продольных и поперечных створов [2].
Недостатками известного способа являются некачественный сбор информации по грунтово-гидрологическим условиям местности из-за нерациональности маршрута движения вездехода, ведущий к обязательному прохождению по участкам, в ряде случаев не требующим обязательного определения грунтово-гидрологических условий местности, и невозможности отклонения от жесткого маршрута к участкам со сложными грунтово-гидрологическими условиями, размещенным между проложенными направлениями движения, а также большие трудозатраты на подготовительные работы по разбивке маршрута на местности, установке ориентиров и вырубке леса по маршруту движения вездехода.
Задача изобретения - повышение качества сбора информации по грунтово-гидрологическим условиям местности и снижение трудозатрат на подготовительные работы.
Это достигается тем, что согласно способу инженерных грунтово-гидрологических изысканий автомобильных дорог, включающему определение в камеральных условиях границы полосы варьирования трассы и маршрута движения вездехода, разбивку маршрута и сбор информации по грунтово-гидрологическим условиям местности при прохождении вездехода со станцией, всю полосу варьирования разбивают на зоны с различными грунтово-гидрологическими условиями, в каждой зоне задают минимальное a и максимальное b расстояния между точками определения грунтово-гидрологического разреза, задают начальное направление движения под углом 35 - 55o вправо или влево по направлению воздушной линии, а сбор информации по грунтово-гидрологическим условиям местности выполняют при прохождении вездехода со станцией. Вездеход со станцией C-023 движется по начальному направлению, обходя деревья и другие препятствия, к границе полосы варьирования с фиксацией маршрута с помощью спутниковой системы GPS по установленному на вездеходе P-кодовому приемнику ASHTECH P-12; у границы полосы варьирования вездеход проходит на расстояние (a + b)/2 параллельно воздушной линии, связывающей конечные точки трассы, далее маршрут движения вездехода в обход деревьев и других препятствий выполняют по направлению к другой границе полосы варьирования трассы и определяют программой на ПЭВМ в виде коридора, границы которого находятся: ближняя на расстоянии a, дальняя на расстоянии b от траектории предыдущего маршрута, при этом при переходе из одной зоны грунтово-гидрологических условий в другую расстояния a и b соответственно изменяют, аналогичным образом производят движение вездехода по всей полосе варьирования трассы.
На чертеже приведена схема маршрута движения вездехода со станцией C-023.
Способ грунтово-гидрологических изысканий автомобильных дорог осуществляют следующим образом.
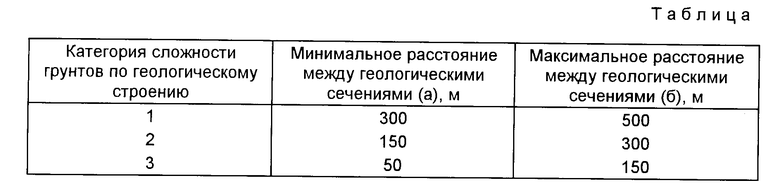
Сначала в камеральных условиях по топографической карте в зависимости от рельефа местности и ситуации определяют границы полосы варьирования трассы, координаты которых с помощью сканера заносят в память ПЭВМ; всю полосу варьирования по топографическим картам и дешифрированию материалов аэросъемок разбивают на зоны, например, 1 - 3, с различными грунтово-гидрологическими условиями (например, болотистые, оползневые, карстовые и посадочные участки, участки с обеспеченными и необеспеченными поверхностными стоками и т.д.). Координаты границ зон с различными грунтово-гидрологическими условиями, границы выделены точками, также с помощью сканера заносят в память ПЭВМ. В каждой зоне устанавливают минимальное a и максимальное b расстояние между точками определения грунто-гидрологического разреза. Примеры таких расстояний приведены в таблице для трех категорий сложности грунтов. Из рассмотрения и последующих изысканий отбрасывают участки местности 4, прилегающие к начальной и конечной точкам трассы и образующиеся границей полосы варьирования и прямыми, направленными под углами 35 - 55o к воздушной линии. Задают начальное направление движения вездехода в зависимости от рельефа и ситуации, например под углом 45o вправо к направлению воздушной линии между начальной и конечной точками трассы.
Вездеход со станцией C-023 (или георадаром фирмы Finn RA) движется по начальному направлению к правой границе полосы варьирования трассы, обходя при этом встречающиеся деревья и другие препятствия. По маршруту движения вездехода на экране дисплея просматривается и записывается на магнитные носители геологический разрез местности, на котором фиксируется положение уровня грунтовых вод. При движении вездехода его положение в декартовой системе координат определяется и записывается на магнитные носители с помощью спутниковой системы GPS по установленному на вездеходе P-кодовому приемнику ASHTECH P-12, который определяет геодезические координаты с точностью выше 5 мм и обладает значительной помехоустойчивостью. Потребляемая мощность приемником менее 12 Вт, питание осуществляется от сети постоянного тока 10 - 36 В.
При достижении правой границы полосы варьирования трассы вездеход проходит на расстояние (a + b)/2 параллельно воздушной линии, связывающей начальный и конечный пункт трассы.
Далее маршрут движения вездехода выполняют в обход деревьев к левой границе полосы варьирования трассы по коридору (границы коридора выделены пунктирными линиями), определяемому программой на ПЭВМ. Причем границы коридора находятся: ближняя на расстоянии a, а дальняя на расстоянии b от траектории предыдущего маршрута вездехода. Вездеход в пределах коридора может осуществлять движение по требуемым участкам местности с возможностью маневрирования. При этом ПЭВМ по программе контролирует переход из одной зоны грунтово-гидрологических условий в другую, в результате чего соответственно изменяются расстояния a и b. Достигнув левой границы полосы варьирования, вездеход проходит параллельно воздушной линии на расстояние (a + b)/2 и вновь направляется по новому коридору к правой границе полосы варьирования и так далее до выхода в конечную точку трассы.
Качество сбора информации по грунтово-гидрологическим условиям местности повышается, так как маршрут движения вездехода будет гибким, в обход участков, не требующих определения грунтово-гидрологических условий местности, и с обязательным прохождением участков со сложными грунтово-гидрологическими условиями.
Трудозатраты на подготовительные работы снизятся, так как не потребуется установка в точках поворота вездехода ориентиров, не будет выполняться разбивка и прорубка трассы по маршруту движения вездехода. Расчеты для трассы автомобильной дороги протяженностью 10 км показали, что предлагаемый способ инженерных грунтово-гидрологических изысканий автомобильных дорог позволяет на 250 - 320 человеко-смен уменьшить трудозатраты на подготовительные работы в сравнении с известным способом инженерных грунтово-гидрологических изысканий, принятым за прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ АВТОМОБИЛЬНЫХ ДОРОГ | 1999 |
|
RU2170297C2 |
| Способ мониторинга уровня грунтовых вод в лесном массиве | 2022 |
|
RU2801434C1 |
| Устройство транспортного комплекса межрегиональной мегаструктуры | 2021 |
|
RU2782201C1 |
| СПОСОБ МОНИТОРИНГА АВТОМОБИЛЬНОЙ ДОРОГИ | 2002 |
|
RU2226673C2 |
| УСТРОЙСТВО ГЕОРАДИОЛОКАЦИОННОЙ ОЦЕНКИ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТОВ | 2010 |
|
RU2419110C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ДЛИНЫ ТРАССЫ АВТОМОБИЛЬНОЙ ДОРОГИ | 1999 |
|
RU2164972C2 |
| СПОСОБ ИСПЫТАНИЯ ДРЕВЕСИНЫ РАСТУЩИХ ДЕРЕВЬЕВ | 2002 |
|
RU2230318C2 |
| ГЕОРАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТОВ | 2010 |
|
RU2416116C1 |
| ЛЕСНАЯ ПАТРУЛЬНАЯ МАШИНА | 2005 |
|
RU2299137C2 |
| ТРАНСПОРТНЫЙ КОРИДОР | 2002 |
|
RU2269442C2 |
Изобретение относится к дорожному строительству, а именно проведению инженерных грунтово-гидрологических изысканий автомобильных дорог. Способ предусматривает определение в камеральных условиях границы полосы варьирования трассы и маршрута движения вездехода, разбивку маршрута и сбор информации по грунтово-гидрологическим условиям местности при прохождении вездехода со станцией. Всю полосу варьирования разбивают на зоны с различными грунтово-гидрологическими условиями, в каждой зоне задают минимальное a и максимальное b расстояние между точками определения грунтово-гидрологического разреза, задают начальное направление движения под углом 35 - 55o вправо или влево по направлению трассы, а сбор информации по грунтово-гидрологическим условиям местности выполняют при прохождении вездехода со станцией. 1 ил., 1 табл.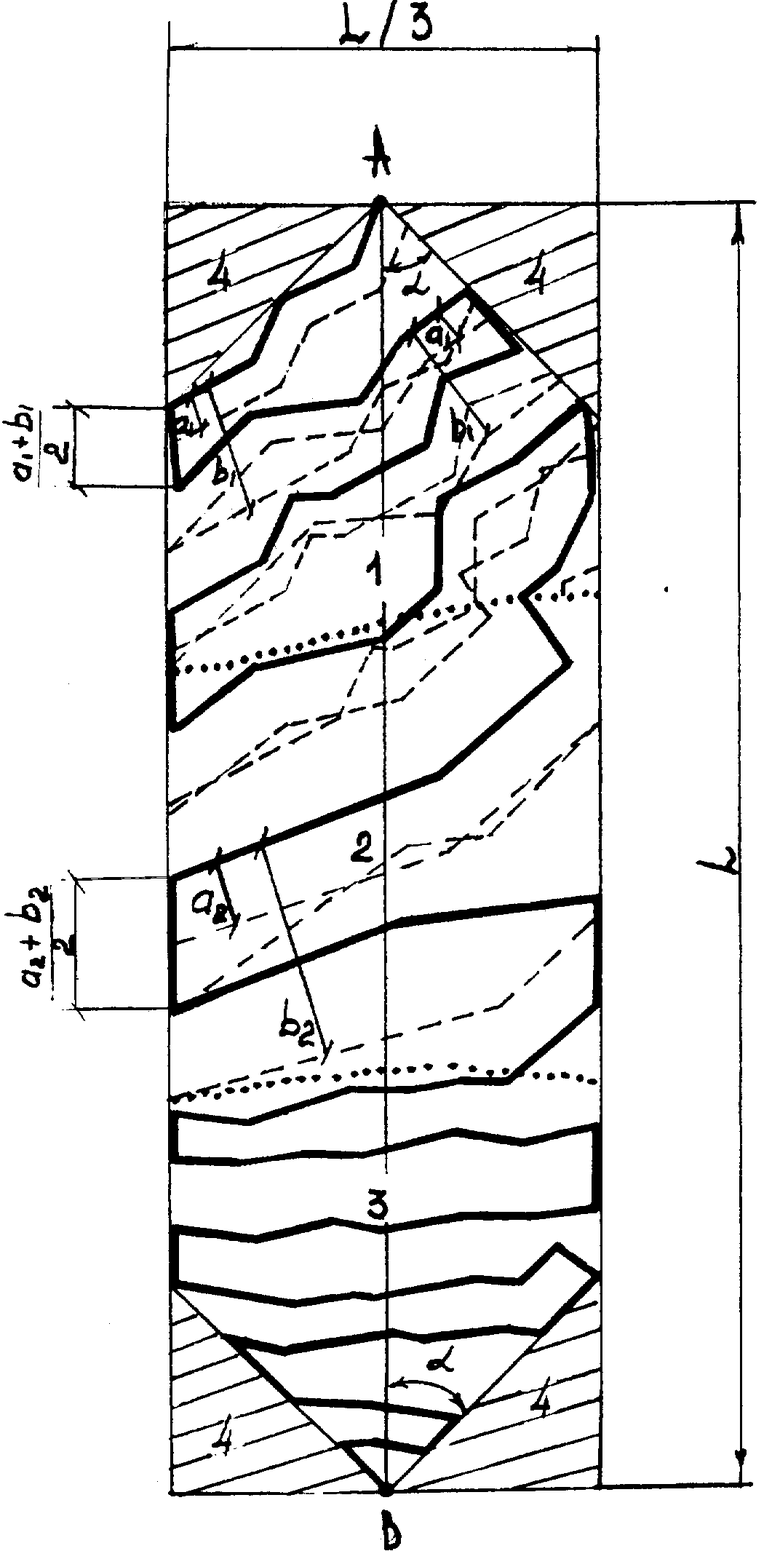
Способ инженерных грунтово-гидрологических изысканий автомобильных дорог, включающий определение в камеральных условиях границы полосы варьирования трассы и маршрута движения вездехода, разбивку маршрута и сбор информации по грунтово-гидрологическим условиям местности при прохождении вездехода со станцией, отличающийся тем, что полосу варьирования разбивают на зоны с различными грунтово-гидрологическими условиями, при этом в каждой зоне определяют минимальное а и максимальное б расстояние между точками определения грунтово-гидрологического разреза, задают начальное направление движения вездехода, а также коридор, границы которого находятся на расстоянии: а - ближняя, б - дальняя от траектории предыдущего маршрута, а положение вездехода на местности фиксируют с помощью спутниковой системы по установленному на вездеходе кодовому приемнику.
| Бабков В.Ф., Андреев О.В | |||
| Проектирование автомобильных дорог | |||
| - М.: Транспорт, ч.2, 1987, с.146 - 151 | |||
| Переходов А.В | |||
| Методы изысканий автомобильных дорог на полове варьирования с использованием радилокационного зондирования грунта | |||
| Диссертация на соискание ученой степени кандидата технических наук | |||
| - М.: МАДИ, 1989, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
