Изобретение относится к области радиолокации и может быть применено для селекции движущихся целей (СДЦ) в когерентно-импульсных обзорных РЛС, содержащих две приемные антенны или антенную решетку.
Известны способы и устройства СДЦ, основанные на установлении различий параметров отраженных и зондирующего сигналов при их частотно-временном сравнении. При этом обработка принятых сигналов может производиться как в одном, так и в двух квадратурных каналах [1]. Недостатком известных способов и устройств СДЦ является то, что при некотором диапазоне радиальных скоростей целей, зависящем от параметров радиолокатора и времени облучения цели, движущиеся цели не распознаются устройствами СДЦ [4].
Известны также способ и устройство СДЦ, основанные на том, что при сравнении отраженных радиолокационных сигналов используются их межобзорные отличия. При данном способе селекция происходит в процессе межобзорного вычитания, то есть вычитания сигналов, полученных на предыдущем сканировании антенны из принимаемых сигналов, в результате чего имеется возможность селекции целей с нулевой или близкой к нулю радиальной скоростью, при наличии их тангенциального перемещения. Недостатком этих способов является то, что уверенная индикация возможна лишь при достаточно больших интервалах сравнения, которые при длительности импульса, удовлетворяющей требуемой разрешающей способности по дальности и скоростях реальных целей, принимают значения от нескольких секунд до нескольких десятков секунд [1, 4].
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому результату является способ и устройство СДЦ, описанные в патенте [3] . В данном способе принимают отраженные от целей последовательности импульсных радиолокационных сигналов, когерентно детектируют принятые сигналы, выделяют сигнал радиального перемещения целей, который подают в блок компенсации. В блоке компенсации сигналы, отраженные от неподвижных целей, подавляются, а сигналы, отраженные от движущихся целей, дают на выходе блока полезный сигнал, меняющийся по амплитуде и полярности. Перед отображением эти полезные сигналы проходят через двухполупериодный выпрямитель, где приводятся к одной полярности.
Устройство СДЦ, реализующее данный способ, содержит приемную антенну, местный гетеродин, смеситель фазирования, когерентный гетеродин, блок когерентной обработки, блок компенсации и двухполупериодный выпрямитель с их связями. В состав блока когерентной обработки входят последовательно соединенные усилитель высокой частоты, смеситель, усилитель промежуточной частоты и фазовый детектор. Фазирование когерентного гетеродина от передатчика на промежуточной частоте через смеситель фазирования обеспечивает необходимую степень внутренней когерентности РЛС, что повышает эффективность подавления сигналов, отраженных от неподвижных целей и местных предметов. Границы применимости данного способа, характеризующие его функциональные возможности в беспомеховой обстановке, определяются величиной радиальной скорости цели и при VR ≅ λ/(2 • TОБЛ), где λ - длина волны, TОБЛ - время облучения цели, движущаяся цель не распознается устройством, осуществляющим данный способ.
Задачей изобретения является обеспечение возможности селекции движущихся целей с нулевыми или близкими к нулю радиальными скоростями, при сохранении интервала сравнения, кратного периоду повторения импульсов TИ. Технический результат изобретения заключается в повышении качества функционирования СДЦ, которое выражается в увеличении коэффициента улучшения.
Решение поставленной задачи достигается тем, что в способе селекции сигналов движущихся целей, заключающемся в том, что принимают отраженные от целей последовательности импульсных радиолокационных сигналов, когерентно детектируют принятые сигналы, выделяют сигнал радиального перемещения целей UR, подавляют сигналы неподвижных целей путем череспериодного вычитания и приводят полученный биполярный сигнал радиального перемещения движущихся целей к одной полярности, дополнительно принимают отраженные от целей последовательности импульсных радиолокационных сигналов на вторую пространственно разнесенную приемную антенну, когерентно детектируют принятые по второму каналу сигналы, выделяют синфазные US1 и US2 и квадратурные UQ1 и UQ2 составляющие сигналов, принятых по первому и второму каналу соответственно, формируют сигнал тангенциального перемещения целей UТ из соотношения: UТ = US1 • US2 + UQ1 • UQ2,
задерживают сигнал UR на время, необходимое для формирования сигнала UT, подавляют сигналы неподвижных целей второго канала путем череспериодного вычитания, приводят полученный биполярный сигнал тангенциального перемещения движущихся целей к одной полярности и получают результирующий сигнал движущихся целей URT путем суммирования видеосигналов радиального и тангенциального перемещения движущихся целей.
В устройстве СДЦ, содержащем последовательно соединенную первую приемную антенну и первый блок когерентной обработки, последовательно соединенные местный гетеродин и смеситель фазирования, на второй вход которого поступает опорный когерентный сигнал от передающего устройства, последовательно соединенные когерентный гетеродин, вход которого подключен к выходу смесителя фазирования, и фазовращатель, а также последовательно соединенные первый блок компенсации и первый двухполупериодный выпрямитель, причем выход местного гетеродина, выход когерентного гетеродина и выход фазовращателя соединены соответственно со вторым, третьим и четвертым входами первого блока когерентной обработки, дополнительно введены последовательно соединенные вторая приемная антенна и второй блок когерентной обработки, блок задержки, блок формирования сигнала тангенциального перемещения целей, последовательно соединенные второй блок компенсации и второй двухполупериодный выпрямитель, а также блок суммирования, при этом второй, третий и четвертый входы второго блока когерентной обработки подключены соответственно к выходу местного гетеродина, выходу когерентного гетеродина и выходу фазовращателя, первый и второй выходы первого блока когерентной обработки и первый и второй выходы второго блока когерентной обработки соединены соответственно с первым, вторым, третьим и четвертым входами блока формирования сигнала тангенциального перемещения целей, выход которого соединен с входом второго блока компенсации, первый выход первого блока когерентной обработки соединен с входом блока задержки, выход которого соединен с входом первого блока компенсации, а выходы первого и второго двухполупериодных выпрямителей соединены соответственно с первым и вторым входами блока суммирования, выход которого является выходом устройства.
Возможность увеличения коэффициента улучшения СДЦ осуществлена учетом данных как о радиальной, так и о тангенциальной скорости целей, что достигается созданием приемной базы, за счет введения второй, пространственно разнесенной приемной антенны и дополнительных блоков.
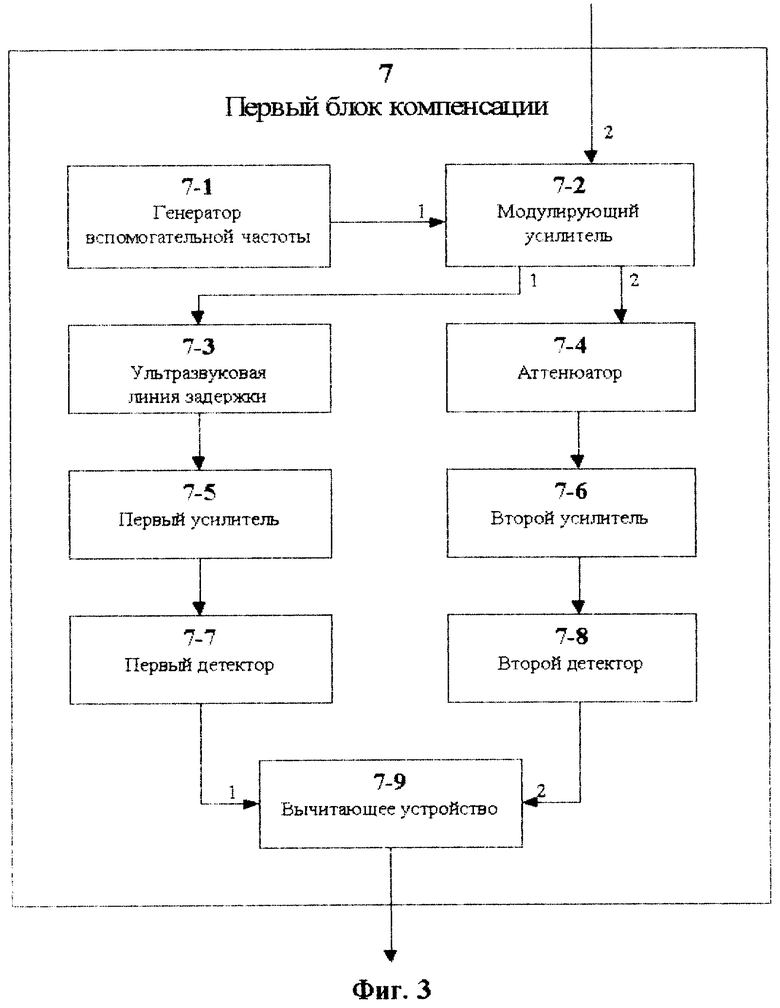
На фиг. 1 приведена схема, поясняющая заявляемый способ СДЦ, на фиг. 2 - структурная электрическая схема устройства СДЦ, на фиг. 3 - структурная электрическая схема блока компенсации, на фиг. 4 - графические зависимости, иллюстрирующие эффективность заявляемого способа.
Устройство СДЦ содержит последовательно соединенную первую приемную антенну 1 и первый блок 2 когерентной обработки, последовательно соединенную вторую приемную антенну 9 и второй блок 10 когерентной обработки, последовательно соединенный местный гетеродин 4 и смеситель фазирования 3, на второй вход которого поступает опорный когерентный сигнал от передающего устройства, последовательно соединенный когерентный гетеродин 5, вход которого подключен к выходу смесителя фазирования 3, и фазовращатель 6, причем второй, третий и четвертый входы первого и второго блоков когерентной обработки подключены соответственно к выходам местного гетеродина, когерентного гетеродина и фазовращателя. Устройство содержит также блок 11 задержки, вход которого подключен к первому выходу блока 2, блок 12 формирования сигнала тангенциального перемещения целей, первый, второй, третий и четвертый входы которого подключены соответственно к первому и второму выходу блока 2 и к первому и второму выходу блока 10, последовательно соединенные первый блок 7 компенсации, вход которого подключен к выходу блока 11 и первый двухполупериодный выпрямитель 8, последовательно соединенные второй блок 13 компенсации, вход которого подключен к выходу блока 12 и второй двухполупериодный выпрямитель 14. Выходы блока 8 и блока 14 соединены соответственно с первым и вторым входами блока 15 суммирования, выход которого является выходом устройства. Первый блок 2 когерентной обработки содержит последовательно соединенные усилитель высокой частоты (УВЧ) 2-1, смеситель 2-2 и усилитель промежуточной частоты (УПЧ) 2-3, а также фазовые детекторы (ФД) 2-4 и 2-5, причем выход УПЧ 2-3 соединен с первыми входами ФД 2-4 и 2-5. Первый вход блока 2 является входом УВЧ 2-1, второй вход блока 2 является вторым входом смесителя 2-2, третий вход блока 2 - вторым входом ФД 2-4, а четвертый вход блока 2 - вторым входом ФД 2-5, а выходы ФД 2-4 и 2-5 являются соответственно первым и вторым выходами блока 2. Структура и связи второго блока 10 когерентной обработки аналогичны структуре и связям блока 2. Блок 12 формирования сигнала тангенциального перемещения целей содержит перемножитель синфазных сигналов 12-1, первый и второй входы которого являются первым и вторым входами блока, перемножитель квадратурных сигналов 12-3, первый и второй входы которого являются третьим и четвертым входами блока, и сумматор 12-2, первый и второй входы которого подключены соответственно к выходам перемножителей 12-1 и 12-3, а выход является выходом блока 12.
Сущность заявляемого способа и возможность его осуществления поясняются дальнейшим описанием работы устройства СДЦ. На схеме, поясняющей сущность изобретения (см. фиг. 1), обозначены:
1 - первая приемная антенна;
2 - вторая приемная антенна, пространственно разнесенная с первой и образующая базу d в горизонтальной плоскости;
поз. а) - последовательность зондирующих импульсов, излученных передатчиком от k = 1 до k = n с длительностью τи и периодом повторения TИ;
поз. б) - траектория движения цели и составляющие вектора скорости цели в момент отражения от цели k-го импульса;
поз. в) - неподвижная цель;
поз. г) - фронты k-х волн, отраженных от неподвижной цели;
поз. д) - фронты k-х волн, отраженных от движущейся цели.
При обнаружении в дальней зоне, то есть при d2/λ ≪ D, где d - длина приемной базы, D - дистанция до цели, фронт отраженной от цели радиоволны можно считать плоским (см. фиг. 1 поз. г), д)). Угол θk между плоскостью отраженной волны и плоскостью базы в каждый k-й момент времени, кратный периоду повторения сигнала TИ, определяется направлением на цель. Разность фаз сигналов, принятых первой и второй антеннами при известных d и λ, определяется только величиной угла θk и равна:
Траектория движения цели является монотонной функцией времени, поэтому на любом конечном интервале наблюдения с началом в точке t = t0 фазу принятого сигнала Φ(t) можно представить в виде степенного ряда:
То же относится и к разности фаз сигналов ψ(t), принятых первой и второй антенной при наличии базы d:
где ΔD(to) = D1-D2 = d•sinθ;
Если считать закон движения цели на ограниченном интервале наблюдения прямолинейным и равномерным, то скорость изменения угловой координаты можно представить в виде [5]:
где VT - тангенциальная составляющая вектора скорости цели.
Ограничиваясь двумя первыми членами ряда в выражении (2), перепишем его с учетом выражения (3) как:
и для малых изменений угла θ на интервале TИ = t - t0:
Зондирующие сигналы представляют собой последовательность радиоимпульсов длительностью τи с периодом повторения TИ, мгновенное значение амплитуды которых равно (см. фиг. 1 поз. а)):
Uзи(t) = Um•cos(ωo•t+Φk), (5)
где Φk - начальная фаза заполнения k-го импульса.
Сигнал, отраженный от цели, находящейся на дистанции D и движущейся прямолинейно и равномерно со скоростью VЦ, есть также последовательность радиоимпульсов, мгновенное значение амплитуды которых с учетом (1), (3), (4) можно записать как сигнал, принятый первой приемной антенной:
UОТР1(t) = Am•cos([ωo+Ωд]•t-Φk-Φд), (6)
сигнал, принятый второй приемной антенной:
где  набег фазы, определяемый начальной дальностью до цели;
набег фазы, определяемый начальной дальностью до цели; набег фазы, определяемый направлением на цель;
набег фазы, определяемый направлением на цель; приращение частоты, определяемое радиальной скоростью цели (частота Доплера);
приращение частоты, определяемое радиальной скоростью цели (частота Доплера); приращение частоты, определяемое тангенциальной скоростью цели.
приращение частоты, определяемое тангенциальной скоростью цели.
С выходов первой и второй приемных антенн 1, 9 принятые сигналы поступают на усилители высокой частоты 2-1 и 10-1 соответственно, а затем на смесители 2-2 и 10-2, где преобразуются в сигналы промежуточной частоты. На вторые входы смесителей подаются непрерывные колебания стабилизированного местного гетеродина 4. Последовательности импульсов с частотой заполнения, равной промежуточной частоте ωпр, усиливаются по обоим каналам в усилителях промежуточной частоты 2-3 и 10-3. Опорный когерентный сигнал от передатчика, представляющий собой часть мощности зондирующего сигнала, снятого с направленного ответвителя, подается на второй вход смесителя фазирования 3, на первый вход которого поступают непрерывные колебания местного гетеродина, и преобразуется в сигнал промежуточной частоты, при этом начальная фаза заполнения k-го импульса на выходе смесителя фазирования равна начальной фазе высокочастотного заполнения k-го импульса зондирующего сигнала. Сигнал с выхода смесителя фазирования поступает на когерентный гетеродин 5, работающий в режиме "захватывания частоты", и навязывает генерируемым им колебаниям начальную фазу излучаемого в данный момент зондирующего импульса. Сигналы с выходов усилителей промежуточной частоты 2-3 и 10-3 сравниваются с опорным колебанием когерентного гетеродина в фазовых детекторах 2-4, 2-5, 10-4 и 10-5, причем на фазовые детекторы 2-4 и 10-4 сигнал когерентного гетеродина поступает непосредственно с его выхода, а на фазовые детекторы 2-5 и 10-5 - сдвинутый на π/2 c выхода фазовращателя 6. В результате на выходах фазовых детекторов 2-4 и 10-4 выделяются синфазные составляющие US1, US2 сигналов, принятых по первому и второму каналам соответственно:
US1(t) = Uk•cos(Ωд•t-Φд)
US2(t) = Uk•cos([Ωд+Wд]•t-Φд-ψk), (8)
а на выходах фазовых детекторов 2-5 и 10-5 выделяются квадратурные составляющие UQ1, UQ2 сигналов, принятых по первому и второму каналам соответственно:
UQ1(t) = Uk•sin(Ωд•t-Φд), (9)
UQ2(t) = Uk•sin([Ωд+Wд]•t-Φд-ψk), (10)
причем сигнал US1 является сигналом радиального перемещения целей UR. Перемноженные в перемножителе 12-1 синфазные составляющие сигналов обоих каналов складываются в сумматоре 12-2 с перемноженными в перемножителе 12-3 квадратурными составляющими сигналов обоих каналов, в результате чего на выходе сумматора 12-2 формируется сигнал UT тангенциального перемещения целей, амплитуда которого зависит от тангенциальной скорости движущихся целей. Сигнал UR с первого выхода блока 2 поступает в блок 6, где получает задержку τ, равную той, которую получает сигнал в блоке 12 формирования сигнала тангенциального перемещения целей в цепях перемножителей и сумматора. Мгновенные амплитуды сигналов UR и UT без учета задержки, полученной в блоках 11 и 12, соответственно имеют вид:
UR(t) = Uk•cos(Ωд•t-Φд),
UT(t) = Uk•cos(Wд•t-ψk). (11)
Их амплитуды в k-й период повторения можно записать как:
UR(t) = Uk•cos(Ωд•(t+(k-1)•Tи)-Φд),
UT(t) = Uk•cos(Wд•(t+(k-1)•Tи-ψk). (12)
Отличием сигнала движущихся целей от сигнала неподвижных целей является его модуляция по амплитуде. Подавление немодулированных видеоимпульсов осуществляется в первом 7 и втором 13 блоках компенсации в каждом канале. Блоки компенсации могут быть выполнены по одной из схем череспериодного вычитания (ЧПВ) [2], например, (см фиг. 3) на ультразвуковой линии задержки (УЛЗ) с применением однократного ЧПВ. Для осуществления череспериодного вычитания в блоке 7 компенсации сигналы проходят по двум каналам: прямому каналу и каналу с задержкой на TИ, и подаются на вычитающее устройство 7-9, где выделяется разностный сигнал. В канале с задержкой ультразвуковая линия 7-3 осуществляет задержку импульсов на период повторения. Для неискаженной передачи через УЛЗ видеоимпульсы преобразуются в радиоимпульсы вспомогательной частоты в модулирующем усилителе 7-2 с помощью генератора вспомогательной частоты 7-1. Прошедший линию задержки сигнал усиливается в первом усилителе 7-5, а затем детектируется в первом детекторе 7-7, что позволяет восстановить исходный модулирующий сигнал. Со второго выхода модулирующего усилителя 7-2 сигнал поступает на аттенюатор 7-4, затухание которого равно затуханию сигнала в линии задержки, а затем усиливается во втором усилителе 7-6, идентичном усилителю 7-5, и детектируется во втором детекторе 7-8.
Структура и связи блока 13 компенсации аналогичны структуре и связям блока 7. Сигналы на выходах прямых каналов блоков компенсации имеют вид, соответствующий (12), а на выходах каналов с задержкой - соответствующий выражениям:
URзад(t) = Uk•cos(Ωд•(t+k•Tи)-ΦD),
UTзад(t) = Uk•cos(Wд•(t+k•Tи)-ψk). (13)
Сигналы на выходе блоков компенсации представляют собой биполярные сигналы, включающие в себя сигнал, соответствующий движущимся целям, и некоторый остаток, возникающий из-за несовершенства компенсации сигналов пассивных помех в вычитающем устройстве. В упрощенном виде их можно записать как:

Для неподвижных целей амплитуда видеоимпульсов от периода к периоду не меняется, угол θk постоянен, радиальная и тангенциальная составляющие скорости и доплеровские частоты равны нулю. Поэтому для неподвижных целей, как видно из (14), выходной сигнал блоков компенсации равен нулю.
Далее сигналы с выходов блоков компенсации 7 и 13 приводятся к одной полярности соответственно в первом 8 и втором 14 двухполупериодных выпрямителях и складываются в блоке 15 суммирования. В результате этого, при движении целей как в радиальном, так и в тангенциальном направлении, то есть при наличии хотя бы одной радиальной или тангенциальной составляющей скорости целей на выходе устройства в целом присутствует полезный сигнал движущихся целей URT:
а для неподвижных целей и местных предметов выходной сигнал устройства равен нулю.
Таким образом, учет тангенциального перемещения целей приводит к возможности селекции движущихся целей с нулевой или близкой к нулю радиальной скоростью при сохранении интервала сравнения, кратного периоду повторения сигнала.
Оценку эффективности предложенного способа как способа СДЦ произведем путем анализа коэффициента улучшения KУ [1, 2]:
где  соответственно выходное и входное отношения мощности сигнала к мощности пассивных помех, усредненные по всем скоростям целей.
соответственно выходное и входное отношения мощности сигнала к мощности пассивных помех, усредненные по всем скоростям целей.
Коэффициент улучшения можно записать следующим образом:
где KП - коэффициент подавления пассивной помехи схемой защиты;
KС = UСвых / UСвх - коэффициент прохождения сигнала через схему защиты.
Коэффициент подавления пассивной помехи можно найти, зная энергетический спектр помехи:
Kп = 0,5•[1-ρ(T)]-1,
где ρ(T) - межпериодный коэффициент корреляции пассивной помехи.
Тогда коэффициент улучшения для известного способа СДЦ с использованием однократного ЧПВ будет определяться выражением:
а для заявляемого способа, при условии одинаковой помеховой обстановки:
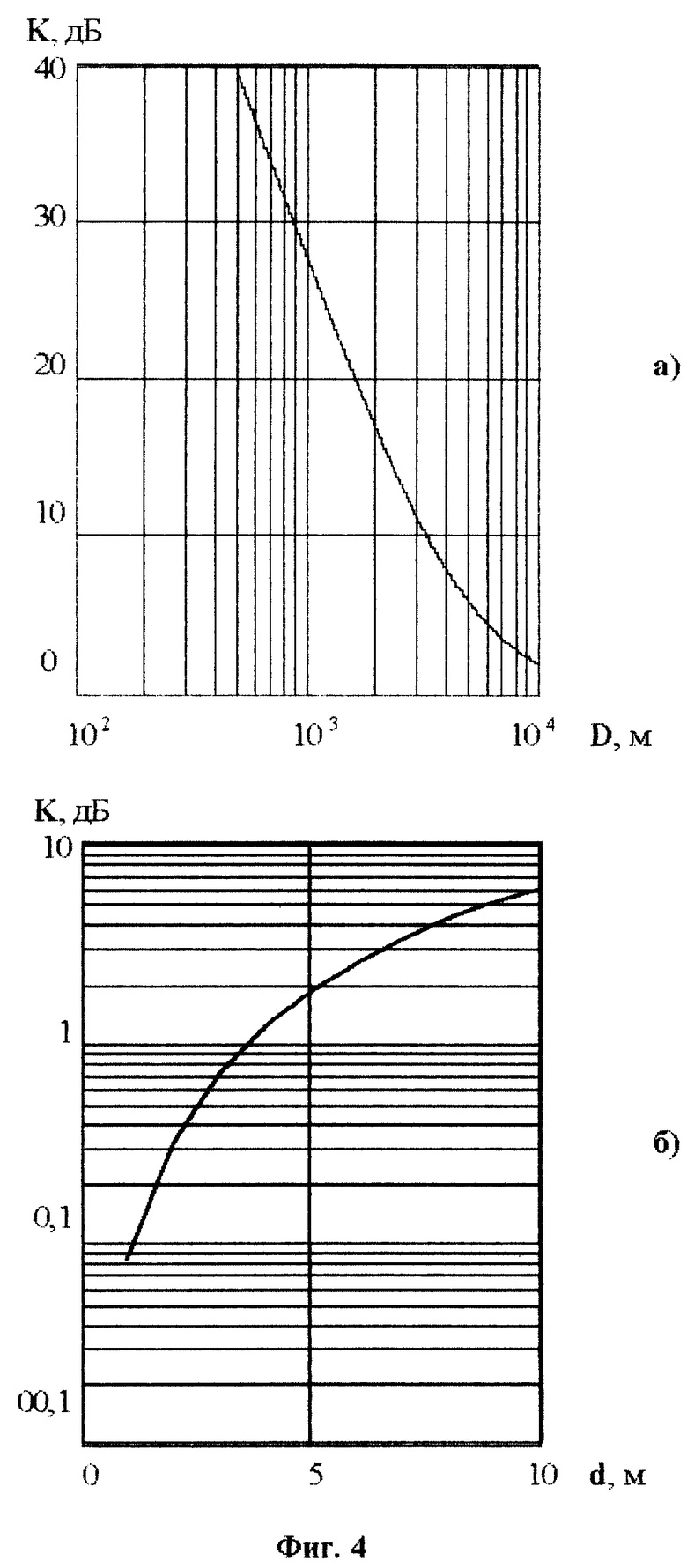
На фиг. 4-а приведена зависимость отношения коэффициентов улучшения заявляемого и известного способов СДЦ K = KУ1 / KУ, определенных в одинаковой помеховой обстановке при использовании однократного череспериодного вычитания, от дистанции до цели D. Зависимость определялась при следующих условиях:
λ = 1 см, TИ = 500 мкс, VЦ - 100 м/с, θ = 3 град, d = 10 м, D=[0...10] км.
На фиг. 4-б приведена зависимость отношения K от величины базы d, которая определялась при тех же условиях, D = 5 км, причем d = [0...10] м.
Так, на дистанции D = 5 км при базе d = 5 м коэффициент улучшения увеличится на 1,8 дБ, а при базе d = 10 м - на 6 дБ (см. фиг. 4-б), а на дистанции D = 1 км и базе d = 10 м коэффициент улучшения увеличится на 28 дБ (см. фиг. 4-а), что подтверждает повышение качества функционирования селекции движущихся целей.
Источники информации.
1. Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М: Радио и связь, 1986, с. 19-21, 46-65, 100-131.
2. Теоретические основы радиолокации. Под ред. Я.Д. Ширмана - М: Сов. радио, 1970, с. 300, 464-474, 486-489.
3. Патент Японии N 53 - 29079, кл. 100 C4, 1978 (прототип).
4. Справочник по радиолокации. Под ред. М. Сколника. Том 3. - М: Сов. радио, 1979, с. 281-287, 339, 342.
5. Тузов Г.И. Выделение и обработка информации в доплеровских системах - М: Сов. радио, 1967, с. 15-20.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ ОБРАБОТКИ | 1974 |
|
SU1840884A1 |
| ЦИФРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1974 |
|
SU1839793A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1977 |
|
SU1840880A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1980 |
|
SU1840929A1 |
| Цифровое устройство для селекции движущихся целей | 1980 |
|
SU1841289A1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| ДАЛЬНОМЕР ДЛЯ ОБНАРУЖЕНИЯ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ЦЕЛЕЙ НА ФОНЕ ПОМЕХОВЫХ ОТРАЖЕНИЙ ОТ ЗЕМЛИ | 1992 |
|
RU2038612C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| СПОСОБ СИНХРОННОГО ДЕТЕКТИРОВАНИЯ В ОБНАРУЖИТЕЛЯХ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2006 |
|
RU2319979C1 |
| РАДИОЛОКАТОР СО СЖАТИЕМ ИМПУЛЬСОВ | 1990 |
|
SU1841071A1 |

Использование: для селекции движущихся целей в когерентно-импульсных обзорных РЛС, содержащих две приемные антенны или антенную решетку. Технический результат: повышение качества функционирования селекции движущихся целей, выражающееся в увеличении коэффициента улучшения. Сущность изобретения: способ селекции движущихся целей основан на том, что выделяют когерентным детектированием сигнал радиального перемещения целей, подавляют сигнал неподвижных целей путем череспериодного вычитания и проводят полученный биполярный сигнал радиального перемещения движущихся целей к одной поверхности. В способе и устройстве селекции движущихся целей дополнительно принимают отраженные от целей радиолокационные сигналы на вторую, пространственно разнесенную приемную антенну, выделяют когерентным детектированием синфазные и квадратурные составляющие сигналов, принятых по первому и второму каналам, по которым формируют сигнал тангенциального перемещения целей, подавляют сигнал неподвижных целей второго канала путем череспериодного вычитания, приводят полученный биполярный сигнал тангенциального перемещения движущихся целей к одной полярности и суммируют видеосигналы радиального и тангенциального перемещения целей, получая результирующий сигнал движущихся целей для последующего отображения. Таким образом, учет тангенциальной скорости цели за счет создания пространственной приемной базы обеспечивает возможность селекции сигналов движущихся целей с нулевой или близкой к нулю радиальной скоростью за время, кратное периоду повторения зондирующих сигналов. 2 с.п. ф-лы, 4 ил.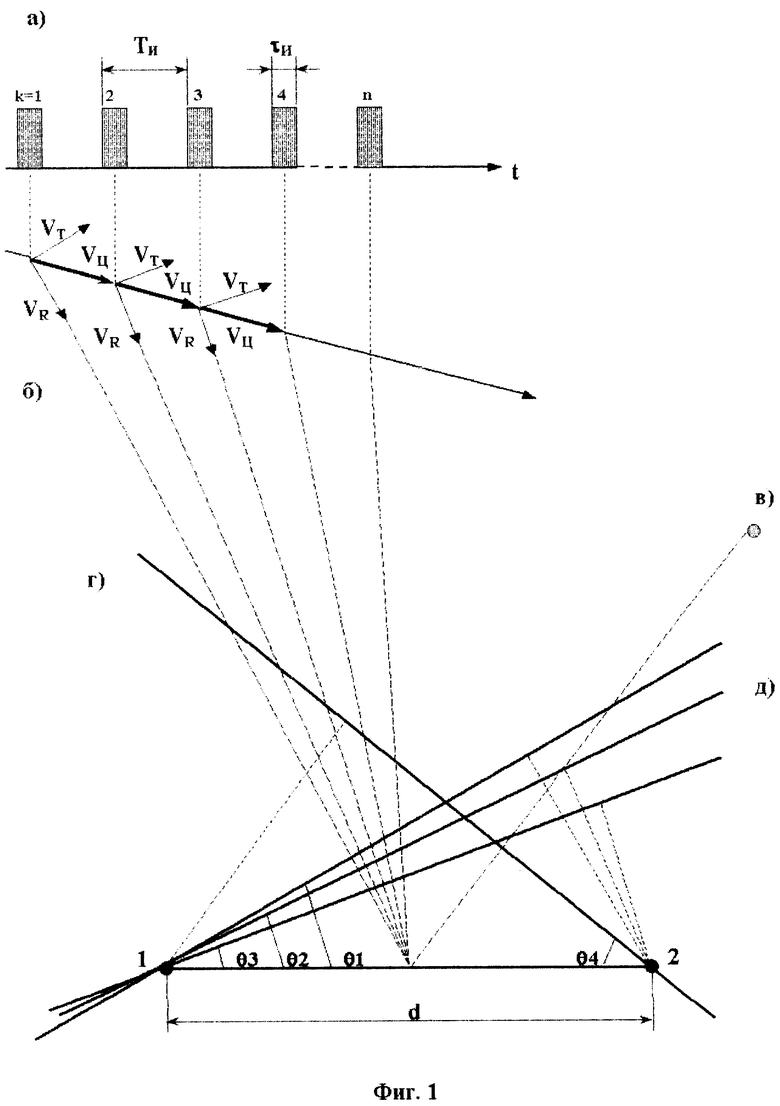
| Веникодробильный станок | 1921 |
|
SU53A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ИЗ ПРИНИМАЕМОГО СИГНАЛА СИГНАЛА, СОДЕРЖАЩЕГО СДВИГ ФАЗЫ МОДУЛИРУЮЩЕГО СИГНАЛА ОТНОСИТЕЛЬНО ФАЗЫ СИГНАЛА МОДУЛЯЦИИ ИЗЛУЧЕННОГО СИГНАЛА, ОБУСЛОВЛЕННЫЙ ЗАПАЗДЫВАНИЕМ ПРИНИМАЕМОГО СИГНАЛА ЗА СЧЕТ ВРЕМЕНИ РАСПРОСТРАНЕНИЯ ДО ЗЕМЛИ И ОБРАТНО, В ДОППЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ВЫСОТЫ (ДАЛЬНОСТИ) И УГЛОВ МЕСТНОЙ ВЕРТИКАЛИ, ОСОБЕННО ИСПОЛЬЗУЕМЫХ ПРИ ПОЛЕТАХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОКОЛОНУЛЕВЫХ СКОРОСТЯХ | 1993 |
|
RU2078351C1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| US 4318099, 02.03.1982 | |||
| US 4529985, 16.07.1985. | |||
