Предлагаемое изобретение относится к области радиолокации, в частности, может быть использовано в радиолокаторах с внутренней когерентностью.
Известны радиолокаторы с компенсаторами пассивной помехи, обладающие повышенной помехозащищенностью (см. патент Японии №47-11956 по кл. 100с4 за 1972 г., патент США №374250 по кл. 343-7.7 за 1973 г.).
Автокомпенсатор, описанный в патенте Японии №47-11956 состоит из когерентного гетеродина, ключа, управляемого гетеродина, фазового детектора, устройства ЧПВ, селектора-ключа, формирователей стробов, формирователя сигнала управления.
Эхо-сигналы помехи определенного участка пространства вызывают запуск формирователей стробов по дальности и азимуту, в результате на вход формирователя сигнала управления через селектор-ключ с выхода устройства ЧПВ будут проходить нескомпенсированные остатки эхо-сигналов помехи именно с этого участка пространства. Формирователь сигнала управления вырабатывает постоянное напряжение определенных величины и знака, с помощью которого частота управляемого гетеродина перестраивается в сторону, уменьшающую уровень остатков на выходе устройства ЧПВ. Ключ на опорном входе фазового детектора управляется также сигналами формирователей стробов и пропускает сигнал управляемого гетеродина только в моменты прихода эхо-сигналов с данного участка пространства.
К недостаткам приведенного аналога изобретения относится возможность компенсации эхо-сигналов пассивной помехи только с одного участка пространства.
Радиолокатор с селекцией движущихся целей, описанный в патенте США №3742500, содержит синхронизатор, генератор пусковых импульсов, передатчик, антенный переключатель, стабилизированный местный гетеродин, усилитель ПЧ, когерентный гетеродин, фазовый детектор, детектор направления, цифровой фазовращатель, преобразователи напряжение-код, устройство ЧПВ, цифровой умножитель, схемы стробирования по дальности, устройства переменной задержки, цифровые интеграторы, интеграторы с памятью, регистр управления, преобразователь код-напряжение, выходное устройство.
Система, включающая синхронизатор, генератор пусковых импульсов, передатчик, антенный переключатель, антенну, местный гетеродин, усилитель ПЧ служит для излучения в определенном направлении пучка электромагнитной энергии, приема эхо-сигналов, отраженных от целей в пределах этого пучка, переноса сигналов на промежуточную частоту, усиления и ограничения сигналов.
Сигналы с выхода усилителя ПЧ проходят последовательно фазовый детектор, преобразователь напряжение-код, устройство ЧПВ, преобразователь код-напряжение, и поступают на выходное устройство. Кроме того, выходные сигналы усилителя ПЧ поступают на детектор направления и далее на одноразрядный преобразователь напряжение-код. Выходной сигнал этого преобразователя, а также выходные сигналы устройства ЧПВ обрабатываются в устройстве, вырабатывающем сигнал управления фазовращателем и состоящем из цифрового умножителя, схем стробирования по дальности, устройств переменной задержки, цифровых интеграторов, интеграторов с памятью, регистра управления.
Выходные сигналы регистра управления управляют цифровым фазовращателем, меняя частоту опорного сигнала в направлении, уменьшающем остатки эхо-сигналов пассивной помехи на выходе устройства ЧПВ.
К недостаткам данного аналога следует отнести ухудшение качества подавления помехи устройством ЧПВ вследствие ограничения сигналов до операции фильтрации, пульсации сигнала ошибки, обусловленные пульсациями выходного сигнала устройства ЧПВ, нелинейную зависимость сигнала ошибки от частотной расстройки эхо-сигналов помехи.
Наиболее близким по технической сущности является радиолокатор с цифровым компенсатором пассивной помехи. Он состоит из передатчика, антенного переключателя, антенны, приемника, синхронизатора, когеретного гетеродина, цифрового фазовращателя, схемы управления фазовращателем, квадратурных фазовых детекторов, преобразователей напряжение-код, устройств ЧПВ, схемы образования огибающей, преобразователя код-напряжение, выходного устройства, цифрового умножителя, цифрового интегратора, дополнительной схемы образования огибающей, делительного устройства, арксинусного преобразователя, схемы определения знака сигнала ошибки.
Данное устройство не обладает недостатками, присущими предыдущему аналогу. Нормировка выходного сигнала устройства ЧПВ производится после операции фильтрации с помощью делительного устройства, пульсации выходных сигналов устройств ЧПВ устраняются схемой образования огибающей, а нелинейная зависимость выходных сигналов устройств ЧПВ от частотной расстройки эхо-сигналов устраняется арксинусным преобразователем, обладающим обратной нелинейной зависимостью.
Однако использование такого автокомпенсатора пассивной помехи возможно только в радиолокаторах, где в качестве системы СДЦ применены устройства ЧПВ, поскольку большинство его узлов входят в систему СДЦ непосредственно. Кроме того, использование сигналов помехи для определения сигнала ошибки после фильтрации ухудшает точность вычисления сигнала ошибки, так как при этом ухудшается отношение помеха/собственные шумы устройства.
Все перечисленное выше приводит в конечном счете к ухудшению быстродействия автоматической компенсации пассивной помехи и невозможности применения данного автокомпенсатора совместно, например, с фильтровой системой СДЦ на видеочастоте.
Целью настоящего изобретения является повышение быстродействия автоматической компенсации сигналов пассивной помехи независимо от вида фильтров устройства СДЦ.
Указанная цель достигается тем, что в известный радиолокатор, содержащий антенну с антенным переключателем, передатчик с когерентным гетеродином, соединенные последовательно приемник, квадратурные фазовые детекторы, фильтры селекции движущихся целей, схему образования огибающей, выходное устройство и соединенные последовательно интегратор, схему управления фазовращателем, фазовращатель, а также преобразователи напряжение-код, делительное устройство, устройство череспериодного вычитания, при этом приемник и передатчик подключены к антенному переключателю, второй вход фазовращателя подключен к выходу когерентного гетеродина, а выход соединен со вторыми входами квадратурных фазовых детекторов, входы преобразователей напряжение-код подключены к выходам квадратурных фазовых детекторов, введен арктангенсный преобразователь, при этом его вход соединен с выходом делительного устройства, а выход соединен со входом устройства череспериодного вычитания, выход устройства череспериодного вычитания подключен ко входу интегратора, входы делительного устройства соединены с выходами преобразователей напряжение-код.
На чертеже представлена блок-схема радиолокатора с цифровым компенсатором пассивной помехи.
Радиолокатор содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, когерентный гетеродин 5, цифровой фазовращатель 6, схему 7 управления фазовращателем, квадратурные фазовые детекторы 8 и 9, преобразователи 10, 11 напряжение-код, фильтры 12, 13 селекции движущихся целей, схему 14 образования огибающей, выходное устройство 15, делительное устройство 16, устройство 17 череспериодного вычитания, цифровой интегратор 18, арктангенсный преобразователь 19, причем передатчик 1 соединен с антенным переключателем 2, который также подключен к антенне 3 и приемнику 4. Когерентный гетеродин 5 соединен с передатчиком 1 и цифровым фазовращателем 6, который соединен со схемой 7 управления фазовращателем и квадратурными фазовыми детекторами 8 и 9.
Квадратурные фазовые детекторы 8 и 9 соединены с приемником 4, преобразователями 10, 11 напряжение-код соответственно, фильтрами 12, 13 селекции движущихся целей, выходы которых соединены со схемой 14 образования огибающей, выход которой подключен к выходному устройству 15. Выходы преобразователей 10, 11 напряжение-код соединены со входами делительного устройства 16, которое соединено со входом арктангенсного преобразователя 19. Устройство 17 череспериодного вычитания включено между арктангенсным преобразователем 19 и цифровым интегратором 18, выход которого подключен к схеме 7 управления фазовращателем.
Устройство работает следующим образом: передатчик 1 вырабатывает зондирующие радиоимпульсы, которые проходят антенный переключатель 2 и излучаются антенной 3 в пространство. Отраженные от целей сигналы улавливаются антенной 3 и через антенный переключатель 2 поступают на приемник 4, в котором они обрабатываются и переносятся на промежуточную частоту. Высокочастотное заполнение зондирующих импульсов связано с сигналом когерентного гетеродина 5.
Этот сигнал, пройдя цифровой фазовращатель 6, управляемый сигналами схемы 7 управления фазовращателем, является опорным сигналом для квадратурных фазовых детекторов 8 и 9, на сигнальные входы которых поступают сигналы приемника 4. Выходные сигналы фазовых детекторов 8 и 9 обрабатываются фильтрами 12, 13 селекции движущихся целей и поступают на схему 14 образования огибающей, а затем на выходное устройство 15 для отображения радиолокационной обстановки.
Работа собственно компенсатора пассивной помехи состоит в следующем: квадратурные сигналы с выходов фазовых детекторов 8 и 9 преобразователями 10, 11 напряжение-код преобразовываются в цифровую форму в моменты времени, соответствующие каждому элементу разрешения по дальности.
В делительном устройстве 16 отыскивается отношение этих двух сигналов, т.е. выходной сигнал делительного устройства 16 пропорционален тангенсу мгновенного значения разности фаз сигнала с выхода приемника 4 и сигнала цифрового фазовращателя 6, а сама разность фаз определяется арктангенсным преобразователем 19. С помощью устройства 17 череспериодного вычитания определяется межпериодный набег фазы сигналов с данного элемента разрешения по дальности.
Выходной сигнал устройства 17 череспериодного вычитания поступает на цифровой интегратор 18, работа которого заключается в следующем. Весь диапазон дальности действия радиолокатора разбит на равные интервалы, состоящие из N элементов разрешения, и цифровой интегратор 18 выдает среднее арифметическое значение сигнала ошибки в каждом интервале дальности.
Выходной сигнал цифрового интегратора 18 поступает на схему 7 управления фазовращателем, которая таким образом управляет фазовращателем, чтобы средний межпериодный набег фазы сигналов пассивной помехи стремился к нулю. Это приведет к тому, что сигналы пассивной помехи будут в значительной степени ослаблены фильтрами 12, 13 селекции движущихся целей.
Поскольку обработка сигнала производится непосредственно после фазовых детекторов 8 и 9, где отношение пассивная помеха/шум велико, вычисление межпериодного набега фазы сигналов пассивной помехи происходит с большей точностью, чем если бы для этого были использованы сигналы с выходов фильтров 12, 13 селекции движущихся целей, что в конечном итоге приведет к более быстрой компенсации сигналов пассивной помехи. Кроме того, в этом случае не предъявляются никакие требования к виду фильтров 12, 13 селекции движущихся целей.
Большинство узлов автокомпенсатора выполнено на элементах дискретной техники, что повышает надежность всего устройства, улучшает его весогабаритные характеристики, позволяет оперативно изменять алгоритм и параметры обработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1999 |
|
RU2170442C1 |
| ЦИФРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1974 |
|
SU1839793A1 |
| Цифровое устройство для селекции движущихся целей | 1980 |
|
SU1841289A1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1963 |
|
SU1840386A1 |
| ЦИФРОВОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ ОБРАБОТКИ | 1974 |
|
SU1840884A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В ОДНОЧАСТОТНОМ РАДИОЛОКАТОРЕ С ВОБУЛЯЦИЕЙ ЧАСТОТЫ ПОВТОРЕНИЯ И ЧЕРЕСПЕРИОДНЫМ ВЫЧИТАНИЕМ СИГНАЛОВ НА ПРОМЕЖУТОЧНОЙ ЧАСТОТЕ | 1964 |
|
SU1840641A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2007 |
|
RU2350981C1 |
Изобретение относится к радиолокационной технике и может быть использовано в радиолокаторах с внутренней когерентностью. Достигаемый технический результат изобретения - повышение быстродействия автоматической компенсации сигналов пассивной помехи. Указанный результат достигается за счет того, что заявленная радиолокационная станция содержит антенну с антенным переключателем, передатчик с когерентным гетеродином, приемник, квадратурные фазовые детекторы, фильтры селекции движущихся целей (СДЦ), схему образования огибающей, делительное устройство, устройство череспериодного вычитания, интегратор, схему управления фазовращателем, фазовращатель, преобразователи напряжение-код, арктангенсный преобразователь, выходное устройство, соединенные между собой определенным образом. 1 ил.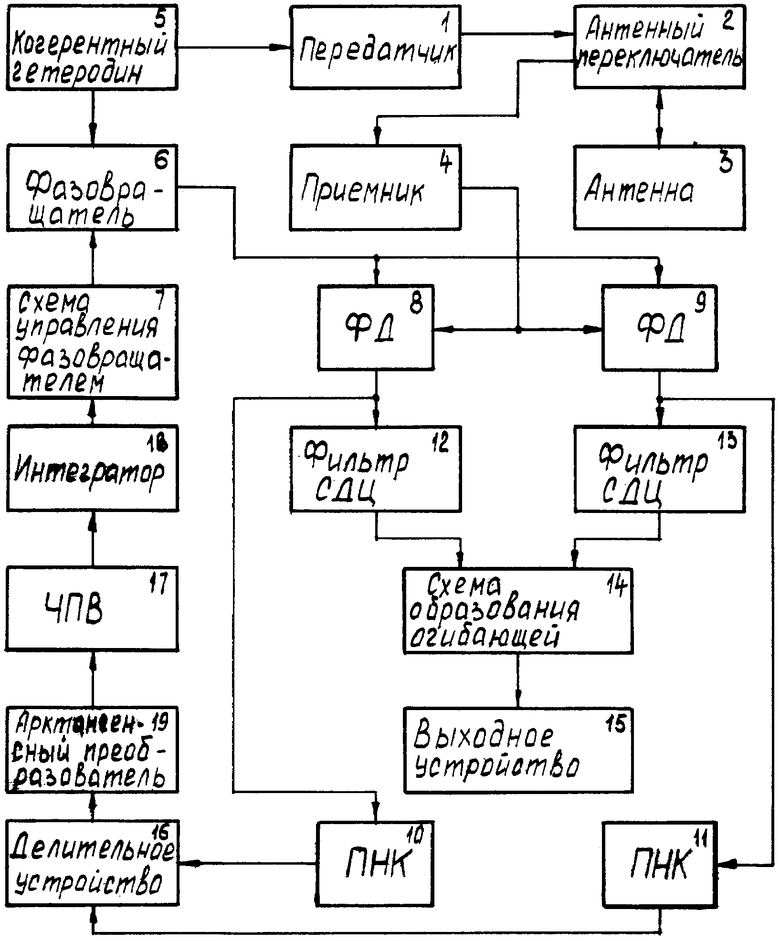
Радиолокационная станция, содержащая антенну, с антенным переключателем, передатчик с когерентным гетеродином, соединенные последовательно приемник, квадратурные фазовые детекторы, фильтры селекции движущихся целей (СДЦ), схему образования огибающей и выходное устройство, делительное устройство, устройство череспериодного вычитания и соединенные последовательно интегратор, схему управления фазовращателем и фазовращатель, второй вход которого подключен к выходу когерентного гетеродина, а выход соединен со вторыми входами квадратурных фазовых детекторов, к выходам которых подключены входы преобразователей напряжение-код, отличающаяся тем, что, с целью повышения быстродействия автоматической компенсации сигналов пассивной помехи независимо от вида фильтров устройства СДЦ, в нее введен арктангенсный преобразователь, включенный между выходом делительного устройства и входом устройства череспериодного вычитания, подключенного ко входу интегратора, а входы делительного устройства соединены с выходами преобразователей напряжение-код.
| Патент США № 3742500 по кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |

