Изобретение относится к области специальной радиолокационной техники и может быть использовано при построении современных помехозащищенных комплексов обнаружения и целеуказания.
Бурное развитие средств радиоэлектронного противодействия в армиях стран вероятного противника выдвигает новые повышенные требования к конструкции современных обзорных радиолокаторов, основная задача которых состоит в своевременном обнаружении целей в различных помеховых ситуациях.
В настоящее время в армиях развитых капиталистических государств наряду с созданием заградительных шумовых помех особое внимание уделяется постановке ответных помех как шумового характера, так и импульсных. При этом все больше внимания уделяется применению комбинированных помех (пассивных плюс ответных), эффективность которых в первую очередь обусловлена тем, что для защиты РЛС от пассивных и активных помех требуются принципиально различные методы, совместное применение которых затруднено (быстрая перестройка несущей частоты и режим СДЦ).
Известны радиолокаторы, в которых для повышения помехозащищенности в условиях воздействия комбинированных помех применяется электронная перестройка несущей частоты при одновременной работе аппаратуры селекции движущихся целей (см., например, патент США №4.155.088, МКИ G01S 9/42, 1979 г.).
Радиолокатор по результатам быстродействующего анализа помеховой обстановки автоматически настраивается на частоту, свободную от помех. Однако после каждого цикла перестройки этот радиолокатор для обеспечения нормального функционирования аппаратуры СДЦ несколько периодов повторения излучает на фиксированной частоте, в результате чего его работа может быть существенно нарушена постановкой ответных импульсных или шумовых помех. Если станция ответных помех отвечает на каждый импульс группы, которую радиолокатор вынужден излучать на фиксированной частоте, то плотности помех его работа вообще становится невозможной.
Двухчастотное передающее устройство по патенту США №4.155.088 обладает более высоким темпом перестройки частоты при сохранении работоспособности СДЦ. Однако в радиолокаторе, построенном на базе этого устройства, одна и та же частота излучается в двух смежных импульсах, причем в одном и том же импульсном сегменте, что значительно снижает помехозащищенность радиолокатора от воздействия ответных или прерывистых шумовых помех, прицельных по частоте. При таком алгоритме смены несущих частот постановщик ответных помех с быстродействующей аппаратурой анализа может забивать радиолокатор на всей дальности действия, по крайней мере, половину периодов повторения и тем самым сильно затруднить обнаружение целей.
Наиболее близким по технической сущности к заявляемому объекту является импульсный когерентный радиолокатор, в котором многочастотный гетеродин выполнен в виде N-гетеродинов, соединенных с селектором частоты, как, например, это сделано в передатчике десятичастотной РЛС с быстрой перестройкой частоты, описанном в книге Г.М. Вишина, Многочастотная радиолокация, Воениздат МО СССР, М., 1973 г. Кроме того, для упрощения дальнейших выкладок ряд устройств в радиолокаторе без изменения его сущности можно объединить. Так, смеситель передатчика и усилитель мощности целесообразно назвать просто передатчиком, а смеситель приемника и усилитель промежуточной частоты - приемником. Более точно схему управления следовало бы назвать блоком управления перестройкой частоты.
С учетом вышеизложенного в качестве прототипа выбран импульсный когерентный радиолокатор, содержащий последовательно соединенные синхронизатор, блок управления перестройкой частоты, селектор частоты, передатчик, антенную систему, приемник, фазовый детектор, схему бланкирования, селектор движущихся целей и устройство стабилизации уровня ложных тревог, а также N гетеродинов, выходы которых подключены к селектору частоты, один из выходов которого соединен с приемником, и когерентный гетеродин, выходы которого подключены к фазовому детектору и передатчику, вход которого соединен с синхронизатором, причем, выход блока управления перестройкой частоты подключен к схеме бланкирования.
Такая совокупность блоков и связей позволяет ослабить эффект воздействия комбинированных (ответных плюс пассивных) помех путем череспериодной работы на двух частотах. В этом случае ответная помеха может маскировать лишь те области, которые удалены от радиолокатора на расстояние, превышающее расстояние до источника помех.
Однако, если постановщик ответных помех находится на незначительном расстоянии от радиолокатора, он может прикрывать значительные области пространства. Это приводит к существенному сужению зоны обнаружения радиолокатора и делает его мало пригодным для обнаружения целей в средней и дальней зонах.
Кроме того, в радилокаторе бланкируется половина периодов повторения, что приводит к потерям радиолокационной информации, к уменьшению в два раза числа интегрируемых импульсов, и, следовательно, к снижению дальности и вероятности обнаружения целей.
Потери радиолокационной информации, присущие радиолокатору, устраняются в радиолокаторе путем применения двухканальной схемы СДЦ. Однако этому радиолокатору, как и радиолокатору, рассматриваемому в качестве прототипа, присущ недостаток в отношении значительного сужения зоны обнаружения при постановке ответных помех с близкого расстояния.
Следует отметить, что все рассматриваемые ранее радиолокаторы не обладают достаточной скрытностью по отношению к разведке противника. Противником может быть легко определена такая основная характеристика РЛС как максимальная дальность действия, так как в радиолокаторах по пат. США №4.155.088 она однозначно связана с периодом повторения. Это позволяет определить тип радиолокатора и соответственно перераспределять средства помех между подавляемыми радиолокаторами оптимальным для постановщика помех образом.
Одним из путей повышения скрытности радиолокационных станций можно считать применение многочастотных РЛС (см., например. Радиолокационные устройства под ред. В.В. Григорина-Рябова, М., Сов. радио, 1970 г.). Повышение скрытности в этом случае может быть осуществлено за счет использования частотной маскировки, заключающейся в том, что все N передатчиков РЛС, работая на различных частотах, формируют одинаково модулированные сигналы, а в приемном устройстве обрабатываются только 1, 2…N сигналов. Однако такое построение РЛС в применении к задаче защиты от комбинированных помех не может считаться перспективным, так как приводит к значительному увеличению массы и габаритов РЛС, что не всегда приемлемо особенно при установке радиолокатора на движущихся объектах, например, кораблях с малым водоизмещением.
Кроме того, обработка только части сигналов или применение специальных видов обработки (перемножение) в рассматриваемых РЛС приводит к ухудшению характеристик обнаружения последних, несмотря на значительные вес и габариты.
Целью настоящего изобретения является устранение указанных выше недостатков и повышение скрытности и помехозащищенности в условиях воздействия комбинированных (пассивных плюс ответных) помех.
Поставленная цель достигается тем, что в импульсный когерентный радиолокатор, содержащий последовательно соединенные синхронизатор, блок управления перестройкой частоты передатчика, первый селектор частоты, передатчик, антенную систему, приемник, фазовый детектор и селектор движущихся целей, а также N-гетеродинов, первые выходы которых подключены к первому селектору частоты, и когерентный гетеродин, выходы которого соединены с передатчиком и фазовым детектором, введены последовательно включенные генератор пачки импульсов, формирователь программы обзора по дальности и второй селектор частоты, входы которого соединены со вторыми выходами N-гетеродинов, электронный коммутатор, выходы которого подключены к селектору движущихся целей и синхронизатору, один из выходов которого соединен с генератором пачки импульсов, выходы которого подключены к блоку управления перестройкой частоты передатчика и к передатчику, соединенные с синхронизатором два блока запоминающих устройств, блок считывания и формирователь адреса, другой вход которого подключен к блоку управления перестройкой частоты передатчика, а также соединенные последовательно формирователь метки "0" и генератор случайных состояний, выходы которого подключены к синхронизатору и генератору пачки импульсов, причем выходы электронного коммутатора через блоки запоминающих устройств соединенные с блоком считывания, один из входов которого подключен к формирователю адреса, а формирователь метки "0" соединен с антенной системой.
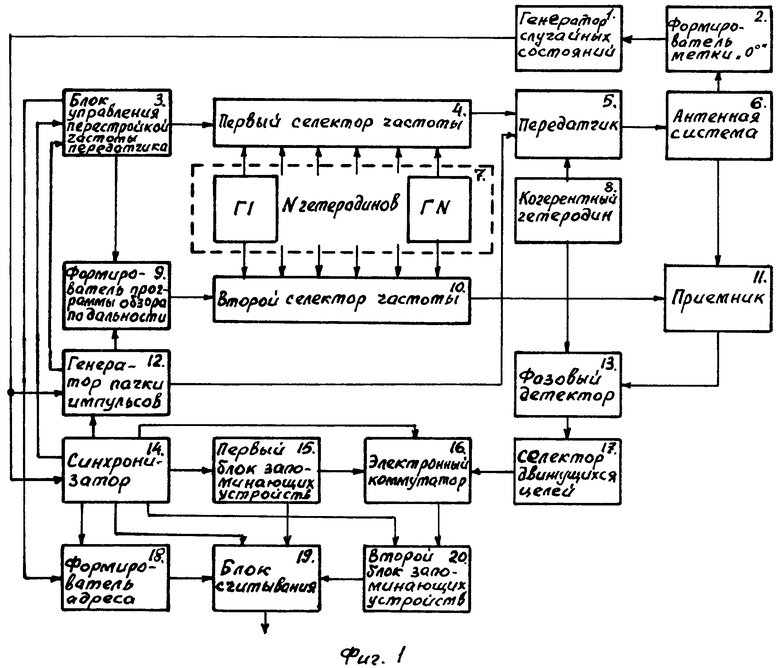
Блок-схема заявляемого импульсного когерентного радиолокатора приведена на фиг. 1. На фиг. 2 приведена временная диаграмма, а на фиг. 3 эпюры напряжений в схеме радиолокатора, поясняющие его работу.
Заявляемый импульсный когерентный радиолокатор содержит генератор случайных состояний 1, формирователь метки "0°" 2, блок управления перестройкой частоты передатчика 3, первый селектор частоты 4, передатчик 5, антенную систему 6, N гетеродинов 7, когерентный гетеродин 8, формирователь программы обзора по дальности 9, второй селектор частоты 10, приемник 11, генератор пачки импульсов 12, фазовый детектор 13, синхронизатор 14, первый 15 и второй 20 блоки запоминающих устройств, электронный коммутатор 16, селектор движущихся целей 17, формирователь адреса 18 и блок считывания 19.
Введение генератора случайных состояний 1, формирователя метки "0°" 2, формирователя программы обзора по дальности 9, второго селектора частоты 10, генератора пачки импульсов 12, первого 15 и второго 20 блоков запоминающих устройств, электронного коммутатора 16, формирователя адреса 18 и блока считывания 19 позволяет при совмещении перестройки несущей частоты от импульса к импульсу с одновременной работой аппаратуры селекции движущихся целей использовать высокую частоту повторения зондирующих сигналов без возникновения неоднозначности определения дальности. При этом формируется специальная программа обзора по дальности, заключающаяся в том, что вся дальность разбивается на участки, которые просматриваются в определенной последовательности, причем, от каждого участка дальности принимаются отраженные сигналы строго на определенной частоте, т.е. каждому участку дальности соответствует своя частота. При таком алгоритме перестройки несущей частоты даже если постановщик ответных помех будет отвечать на каждый импульс радиолокатора, он может закрыть от наблюдения только узкий участок дальности, глубина которого не превышает L=Dmax/K, где Dmax - максимальная дальность действия РЛС, а K - количество используемых частот. Если же постановщик ответных помех имеет ограниченную пропускную способность (отвечает не на каждый импульс передатчика), то при соответствующем количестве частот благодаря примененной программе обзора по дальности вероятность постановки ответной помехи РП<1/K.
Указанные преимущества позволяют в условиях воздействия комбинированных помех значительно повысить скрытность и помехозащищенность заявляемого радиолокатора по сравнению с известными аналогами и прототипами.
Рассмотрим работу заявляемого импульсного когерентного радиолокатора.
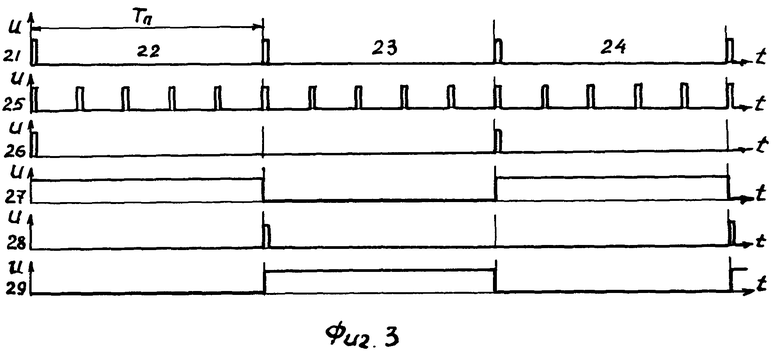
В каждом периоде повторения синхронизатор 14 генерирует импульс 21, которым запускается генератор пачки импульсов 12 и блок управления перестройкой частоты передатчика 3. Период повторения импульсов 21 синхронизатора 14 выбирается из условия

где Дмах - требуемая дальность действия РЛС.
На каждый из импульсов 21 генератор пачки импульсов 12 формирует пачку, количество импульсов в которой равно числу используемых частот K. Расстояние между импульсами в пачке равно

Блок управления перестройкой частоты передатчика 3 с помощью первого селектора частоты 4 под действием импульсов 25 поочередно подключает гетеродины 7 ко входу передатчика 5 таким образом, что каждому импульсу пачки 25 соответствует новая частота. Передатчик 5 из напряжения включенного в данный момент одного из N гетеродинов 7 и напряжения когерентного гетеродина 8 под действием импульсов 25 формирует последовательность зондирующих сигналов, несущая частота которых изменяется от импульса к импульсу, а период повторения равен ΔT. Полный цикл перестройки частоты осуществляется в одном периоде повторения, например, 22. В очередном периоде повторения 23 цикл перестройки частоты повторяется, причем порядок следования частот сохраняется прежним. Сформированные передатчиком 5 зондирующие сигналы излучаются антенной 6.
Таким образом, в каждом периоде повторения ТП (например, 22, 23, 24) последовательно излучаются K импульсов с частотами заполнения f1; f2; … fк.
Отраженные сигналы и помехи принимаются антенной системой 6 и поступают на приемник 11. Прием и обработка сигналов производится идентично в пределах каждого из периодов ТП (например, 22, 23, 24) следующим образом.
К моменту излучения первого зондирующего импульса очередной пачки, например, в периоде повторения 23, на выходе приемника 11 присутствуют сигналы всех излученных в предыдущей пачке частот, но отраженные от различных участков дальности.
На фиг. 2 в координатах время (t) - дальность (Д) жирными линиями условно показано расстояние, которое прошли радиоволны (туда и обратно), излученные на различных частотах в предыдущем периоде ТП на момент излучения первого импульса очередной пачки.
После излучения первого импульса очередной пачки (например, в периоде 23) приемник 11 может принимать сигналы с любого из 1…V участков дальности, в зависимости от того, какой гетеродин из N гетеродинов 7 подключен к приемнику 11.
К началу очередного периода ТП K-ой частотой начинает облучаться (N-K+2) участок дальности. Нетрудно убедиться в том что для того, чтобы в очередном периоде повторения, например, 23 поочередно принять отражения от всех участков дальности, гетеродины 7 должны подключаться ко входу приемника 11 в следующем порядке:

где: n - номер излученной в периоде ΔТ частоты;
l - номер частоты, на которой должен вестись прием после излучения зондирующего импульса на n-й частоте;



Формула (1) справедлива для нечетного количества используемых частот K. При четном количестве используемых частот K
Однако при четном количестве используемых частот K прием ведется только на четных частотах. Поэтому предпочтительней использовать алгоритм перестройки приемника 11, описанный формулой (1).
Формирователь программы обзора по дальности 9, используя импульсы 25 и код номера излученной частоты, поступающий из блока управления перестройкой частоты передатчика 3, формирует последовательность импульсов, под действием которых второй селектор частоты 10 поочередно подключает используемые K гетеродинов из N гетеродинов 7 к гетеродинному входу приемника 11 в последовательности, описываемой формулой (1).
При описанном алгоритме перестройки частоты приемника 11 в каждом периоде повторения ТП (например, 22) сначала принимаются сигналы, отраженные от удаленных участков дальности. Если обозначить участки дальности цифрами I, II, III, IV, V, то строка дальности при K=5 имеет вид: V, IV, III, II, I (фиг. 2).
Обработанные в приемнике 11 сигналы на промежуточной частоте поступают на фазовый детектор 13, где сравниваются по фазе с напряжением когерентного гетеродина 8. Дальше сигналы поступают на селектор движущихся целей 17, в котором подавляются отражения от пассивных помех.
Селектор движущихся целей 17 может представлять собой схему череспериодной компенсации на линиях задержки с временем задержки ТП или фильтровую систему с дискретизацией по дальности.
На выходе селектора движущихся целей 17 сигналы, отраженные от различных участков дальности расположены в том же порядке, что и на выходе приемника 11 (для нашего примера V, IV, III, II, I).
Для "дешифрования" полученной последовательности сигналов используются блоки запоминающих устройств 15 и 20, формирователь адреса 18, блок считывания 19 и электронный коммутатор 16, которые работают следующим образом.
Каждой из K используемых частот излучения в блоках запоминающих устройств 15 и 20 соответствует отдельная секция. В периоде повторения 22 под действием импульса 26 электронный коммутатор 16 подключает выход селектора движущихся целей 17 ко входу первого блока запоминающих устройств 15, который предварительно обнуляется импульсом 26. Полученная в периоде 22 радиолокационная информация записывается в первый блок запоминающих устройств 15 в порядке V, IV, III, II, I. В следующем периоде 23 электронный коммутатор 16 подключает выход селектора движущихся целей 17 ко второму блоку запоминающих устройств 20, который в начале периода 23 обнуляется импульсом 28. Таким образом, информация, полученная в периоде 23, записывается во второй блок запоминающих устройств 20.
Формирователь адреса 18, используя код излучаемой частоты из блока управления перестройкой частоты передатчика 3 и импульсы управления 29 из синхронизатора 24, подключает блок считывания 19 поочередно (через период ТП) либо к первому 15, либо ко второму 20 блокам запоминающих устройств.
В периоде повторения 22 блок считывания 19 подключается ко второму блоку запоминающих устройств 20, а в периоде повторения 23 - к первому блоку запоминающих устройств 15. Под действием импульсов управления, формируемых формирователем адреса 18, и импульсов 25 радиолокационная информация, записанная в блоках запоминающих устройств 15 и 20, считывается блоком считывания 19 в порядке I, II, III, IV, V и может подаваться на индикаторы или другие устройства отображения.
Для устранения потерь радиолокационной информации в момент излучения зондирующих импульсов передатчиком 5 (приемник 11 на время излучения зондирующих сигналов закрыт) в предлагаемом импульсном когерентном радиолокаторе применяется вобуляция периода повторения ТП через каждый период обзора. Для этого синхронизатор 14 и генератор пачки импульсов 12 должны быть выполнены управляемыми.
В каждом периоде обзора формирователь метки "0°" 2 генерирует импульс при прохождении лучом диаграммы направленности антенны определенного азимута (в рассматриваемом примере азимута 0°).
Под действием этого импульса запускается генератор случайных состояний 1, выходное напряжение которого используется для управления величиной периодов ТП и ΔТ, выходное напряжение генератора случайных состояний 1 остается постоянным до момента прихода очередного импульса из формирователя метки "0°" 2. При вобуляции периода повторения ТП временные соотношения между ТП и ΔТ остаются прежними и определяются формулой

Таким образом, в предлагаемом импульсном когерентном радиолокаторе осуществляется перестройка частоты от импульса к импульсу при одновременной работе аппаратуры селекции движущихся целей.
Применение предложенного алгоритма перестройки несущей частоты радиолокатора позволяет использовать в качестве селектора движущихся целей 17 без ограничений любую систему подавления допустимой сложности и тем самым обеспечить качественное подавление мешающих отображений от подстилающей поверхности без потерь радиолокационной информации, свойственных прототипу и известным аналогам.
В то же время благодаря быстрой перестройке частоты излучения значительно улучшается помехозащищенность предлагаемого радиолокатора по отношению к ответным помехам.
Как указывалось выше, даже при применении противником станции ответных помех с высокой пропускной способностью в предлагаемом радиолокаторе ответной помехой может быть забит только участок дальности
что составляет (при определенном выборе количества используемых частот K) незначительный участок просматриваемой дальности и не может оказать существенного воздействия на характеристики обнаружения РЛС. Если же в радиолокаторе применяется четное количество частот, а прием осуществляется по алгоритму, описываемому формулой (2), то даже подавление такого незначительного участка дальности станцией ответных помех с быстродействующим анализатором может осуществляться только с вероятностью 0,5.
Если же станция помех не может отвечать на каждый излученный импульс, то вероятность постановки ответных помех составляет:


Кроме того, отсутствие однозначной соответственности между диапазоном просматриваемой дальности и периодом повторения ΔТ (без нарушения однозначности измерения дальности) значительно затрудняет определение основных, параметров и назначения заявляемого импульсного когерентного радиолокатора станцией разведки противника, что также снижает вероятность постановки активных помех.
Благодаря указанным преимуществам заявляемый импульсный когерентный радиолокатор по сравнению с прототипом и известными аналогами обладает повышенной скрытностью и помехозащищенностью в условиях воздействия комбинированных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840991A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1980 |
|
SU1840929A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА ОТРАЖЕННОГО СИГНАЛА ПРИ НЕКОГЕРЕНТНОМ ИЗЛУЧЕНИИ ЗОНДИРУЮЩЕГО СИГНАЛА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315331C1 |
| Двухэтапный способ измерения координат цели и устройство для его осуществления | 2017 |
|
RU2645741C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |

Изобретение относится к области радиолокационной техники и предназначено для использования в помехозащищенных комплексах обнаружения и целеуказания. Достигаемый технический результат - повышение помехозащищенности при действии активных и пассивных помех. Указанный результат достигается за счет того, что радиолокатор содержит антенную систему, передатчик, приемник, когерентный гетеродин, фазовый детектор, преобразователь частоты повторения, блок гетеродинов, селектор движущихся целей, синхронизатор, блок управления, первый селектор частоты, генератор пачки импульсов, формирователь программы обзора по дальности, два блока памяти, формирователь адреса, коммутатор, блок считывания и второй селектор частоты, определенным образом соединенные между собой. 3 ил.
Импульсный когерентный радиолокатор, содержащий антенную систему, передатчик, приемник, когерентный гетеродин, фазовый детектор, преобразователь частоты повторения, блок гетеродинов, селектор движущихся целей, последовательно соединенные синхронизатор, блок управления и первый селектор частоты, выход которого соединен с первым входом передатчика, соединенного выходом через антенную систему с преобразователем частоты повторения, выход которого соединен с входом синхронизатора, причем вход селектора движущихся целей соединен с выходом фазового детектора, первый вход которого соединен с первым выходом когерентного гетеродина, второй вход - с выходом приемника, соединенного входом с выходом антенной системы, а второй выход когерентного гетеродина соединен со вторым входом передатчика, первый выход блока гетеродинов соединен со вторым входом первого селектора частоты, первый выход синхронизатора соединен с первым входом блока управления, отличающийся тем, что, с целью повышения помехозащищенности при действии активных и пассивных помех, в него введены генератор пачки импульсов, формирователь программы обзора по дальности, два блока памяти, формирователь адреса, коммутатор, блок считывания и второй селектор частоты, первый вход которого соединен с выходом формирователя программы обзора по дальности, второй вход - со вторым выходом блока гетеродинов, а выход соединен со вторым входом приемника, при этом первый вход формирователя программы обзора по дальности соединен с первым выходом блока управления, второй выход которого соединен с первым входом формирователя адреса, второй вход - с первым выходом генератора пачки импульсов, второй выход которого соединен со вторым входом блока управления, третий выход генератора пачки импульсов соединен с третьим входом передатчика, первый вход генератора пачки импульсов соединен с выходом преобразователя частоты повторения, а второй вход - соединен со вторым выходом синхронизатора, третий выход которого соединен со вторым входом формирователя адреса, четвертый выход - со вторым блоком считывания, пятый выход - с первым входом второго блока памяти, шестой выход - с входом первого блока памяти, седьмой выход - со вторым входом коммутатора, выход формирователя адреса соединен с первым входом блока считывания, третий вход которого соединен с первым выходом первого блока памяти, четвертый вход - с выходом второго блока памяти, а выход первого блока памяти соединен с первым входом коммутатора, третий вход которого соединен с выходом селектора движущих целей.

