Изобретение относится к цифровой вычислительной технике и может быть использовано в системах цифровой обработки радиотехнических сигналов для решения задач оптимальной линейной фильтрации.
Известно устройство [1], в состав которого входит фильтр Калмана, недостатком которого является ограниченность функциональных возможностей, так как в данном устройстве решена задача линейной фильтрации скалярных процессов.
Известно устройство [2] , недостатком которого является ограниченность функциональных возможностей из-за большого объема вычислений, необходимых для расчета оценки информационного процесса в реальном масштабе времени.
Наиболее близким по технической сущности к заявленному изобретению является линейный фильтр [3], содержащий блок вычисления оценки информационного процесса, состоящий из интегратора, двух элементов формирования произведения, элемента формирования разности, элемента формирования произведения невязки измерения и матричного коэффициента усиления, элемента формирования суммы. Недостатком данного устройства является невозможность уменьшения временного интервала для расчета оценки информационного процесса в реальном масштабе времени за счет декомпозиции вычислительной процедуры расчета ковариационной матрицы ошибок фильтрации на два блока, один из которых может быть рассчитан заранее, до начала обработки измерительной информации.
Увеличение вычислительной эффективности алгоритмов линейной фильтрации является актуальным направлением, поскольку, чем меньше вычислительные затраты, тем выше качественные характеристики алгоритмов обработки измерительной информации.
Заявленное изобретение направлено на сокращение временных затрат при формировании оценки информационного процесса в измерительных системах, что весьма важно при радиолокации целей, синтезе систем автоматического слежения и управления и т. д., содержащее блоки: блок вычисления оценки информационного процесса, блок формирования суммы, блок обращения матриц, блок вычисления точностных коэффициентов, блок формирования и выдачи априорных данных, при этом первый выход блока формирования и выдачи априорных данных соединен с первым информационным входом блока формирования суммы, выход которого соединен со вторым информационным входом блока вычисления оценки информационного процесса, первый информационный вход и выход которого являются соответственно входом и выходом устройства, второй, третий и четвертый выходы блока формирования и выдачи априорных данных соединены соответственно с первым, вторым и третьим информационными входами блока вычисления точностных коэффициентов, выход которого соединен с информационным входом блока обращения матриц, выход которого соединен со вторым информационным входом блока формирования суммы.
Как следует из описания совокупности признаков заявляемого изобретения, новизна решения задачи состоит во введении дополнительных блоков и межблочных соединений, которые позволяют получить решение уравнений для оценки информационного процесса и ковариационной матрицы ошибок оценивания
K = P + Z-1, (2)

где X*(t) - вектор оценки информационного процесса;
A(t), H(t) - матричные непрерывные функции времени;
K(t) - ковариационная матрица ошибок фильтрации;
G(t), N(t) - спектральные плотности векторных независимых центрированных белых гауссовских шумов;
Y(t) - вектор наблюдений;
G1 = HTG-1H;
N1 = QNQT;
Q(t) - матричная непрерывная функция времени;
B = G1P-AT;
P(t), Z(t) - априорная и апостериорная составляющие матрицы K(t).
Задача решается для заданных начальных условий
Z0 = (K0 - P0)-1, X*(t0) = X0 *.
Уравнение (3) решается до начала процесса фильтрации при произвольных начальных условиях P(t0) = P0. Рассмотрим уравнение (4). Оно является линейным и имеет решение
Z = E + ФZ0ФT,
где Ф - фундаментальная матрица, соответствующая (4), которая может быть рассчитана на основании уравнения
Матрица Ф(t), E(t) также может быть рассчитана заранее при t < t0 на основании информации о значениях P(t). Непосредственно в процессе фильтрации (t ≥ t0) в текущем времени проводятся вычисления матриц Z(t), K(t), и X*(t).
Таким образом, как следует из выражений (2) - (6), введение новых структурных элементов и связей позволяет в совокупности с общими признаками получить технический результат, состоящий в уменьшении временного интервала, необходимого для получения оценки информационного процесса в реальном масштабе времени.
Заявляемое устройство может быть применено в информационных системах, связанных со сбором и обработкой информации, например, в информационных системах радиолокационных и радионавигационных комплексов, системах автоматического управления и т. д.
Сущность изобретения поясняется фиг. 1 - 3, где представлены структурная схема устройства, функциональные схемы блока вычисления точностных коэффициентов, блока вычисления оценки информационного процесса.
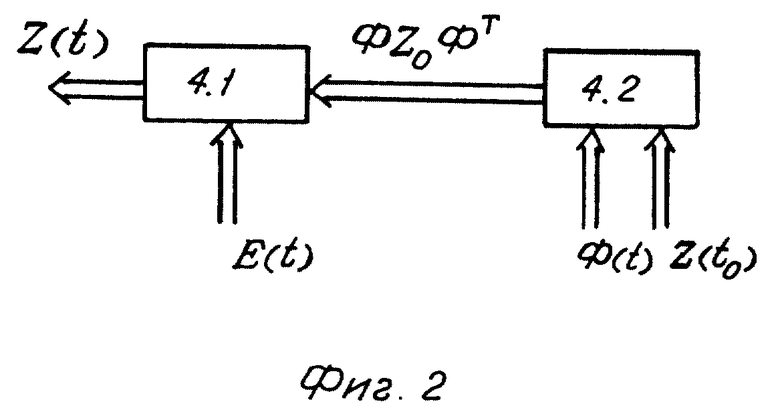
На фиг. 1 представлена структурная схема декомпозиционного линейного фильтра. Устройство содержит блок 1 вычисления оценки информационного процесса, блок 2 формирования суммы, устройство 3 обращения матриц, блок 4 вычисления точностных коэффициентов, блок 5 формирования и выдачи априорных данных.
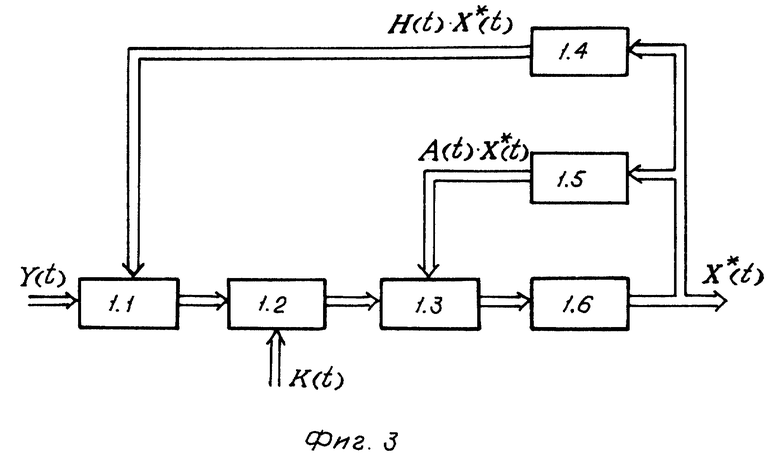
На фиг. 2 представлена функциональная схема блока вычисления точностных коэффициентов, которая содержит элемент 4.1 суммирования матриц и элемент 4.2 перемножения матриц.
На фиг. 3 представлена функциональная схема блока вычисления оценки информационного процесса, содержащая элемент 1.1 формирования разности, элемент 1.2 формирования произведения невязки измерения и матричного коэффициента усиления, элемент 1.3 формирования суммы, элементы 1.4 и 1.5 формирования произведения, интегратор 1.6.
Первый выход блока 5 выдачи априорных данных (фиг. 1) соединен с первым информационным входом блока 2 формирования суммы, выход которого соединен со вторым информационным входом блока 1 вычисления оценки информационного процесса, первый информационный вход и выход которого являются соответственно входом и выходом устройства, второй, третий и четвертый выходы блока 5 формирования и выдачи априорных данных соединены соответственно с первым, вторым и третьим информационными входами блока 4 вычисления точностных коэффициентов, выход которого соединен с информационным входом блока 3 обращения матриц, выход которого соединен со вторым информационным входом блока 2 формирования суммы.
Третий и четвертый выход блока 5 формирования и выдачи априорных данных (фиг. 2) соединены с первым и вторым информационным входом элемента 4.2 формирования произведения матриц, выход которого соединен с информационным входом элемента 4.1 суммирования матриц, выход которого соединен с информационным входом блока 3 обращения матрицы. Второй выход блока 5 формирования и выдачи априорных данных соединен со вторым информационным входом элемента 4.1 формирования суммы.
Выход интегратора (фиг. 3) соединен с информационным входом элемента 1.4 формирования произведения, выход которого соединен со вторым информационным входом элемента 1.1 формирования разности, выход которого соединен с информационным входом элемента 1.2 формирования произведения невязки измерения и матричного коэффициента усиления, выход которого соединен с первым информационным входом элемента 1.3 формирования суммы, выход которого соединен с информационным входом интегратора, выход которого соединен с информационным входом элемента 1.5 формирования произведения, выход которого соединен со вторым информационным входом элемента 1.3 формирования суммы; выход интегратора 1.6 также является выходом устройства. Первый информационный вход элемента 1.1 формирования разности является входом устройства.
Устройство работает следующим образом. В исходном состоянии в блоке 5 выдачи априорных данных (фиг. 1) записаны начальные значения и постоянные
P(t), E(t), P0 = P(t0), Ф(t), K0 = K(t0), X0 * = X*(t0).
Все значения, кроме K0 и X0 *, записаны предварительно в блоке 5 и выдаются в процессе работы. Значения K0 и X0 * становятся известными и записываются одновременно с появлением колебания на входе устройства. После этого в блоке расчета точностных характеристик 4 определяются значения апостериорной составляющей Z(t); на выходе блока 3 формируются значения Z1(t), которые в блоке 2 суммируются с априорными значениями P(t); при этом на основании (2) формируются значения K(t), которые поступают в блок 1 вычисления оценки информационного процесса, на вход которого поступает принимаемое колебание, а на выходе формируется оценка информационного процесса X*.
Блок 4 расчета точностных характеристик работает следующим образом (фиг. 2). Значения Ф(t) и Z0 поступают на вход блока 4.2, на выходе которого формируются значения ФZ0ФT, которые суммируются со значениями E(t) в блоке 4.1, на выходе которого образуются значения Z(t).
Блок вычисления оценки информационного процесса работает следующим образом (фиг. 3). В блоке 1.1 формируется невязка измерения Y - H X*, которая в блоке 1.2 умножается на матричный коэффициент усиления KHTG-1. Сформированное произведение и образованная в блоке 1.5 величина AX* поступают на вход блока 1.3; на выходе интегратора 1.6 формируется оценка информационного процесса.
Источники информации
1. АС СССР SU N 1646411. В.Н. Таран, В.А. Детистов, К.А. Часнык. Адаптивная система управления.
2. М. С. Ярлыков. Статистическая теория радионавигации. - М.: Радио и связь, 1985, с. 122.
3. А.А. Венгеров, В.А. Щаренский. Прикладные вопросы оптимальной линейной фильтрации. - М.: Энергоиздат, 1982, с 84.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2007 |
|
RU2357357C2 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИТЕРАТИВНЫЙ ФИЛЬТР | 2007 |
|
RU2362265C1 |
| ЦИФРОВОЙ МНОГОИТЕРАЦИОНАЛЬНЫЙ ФИЛЬТР | 2011 |
|
RU2452080C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МНОГОКАСКАДНЫЙ ФИЛЬТР | 2010 |
|
RU2436228C1 |
| ЦИФРОВОЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2003 |
|
RU2257667C2 |
| ОПТОЭЛЕКТРОННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1999 |
|
RU2152070C1 |
| СПОСОБ ЭНЕРГЕТИЧЕСКОЙ ОПТИМИЗАЦИИ МОНОИМПУЛЬСНЫХ АНТЕННЫХ РЕШЕТОК С СОВМЕСТНЫМ ФОРМИРОВАНИЕМ ЛУЧЕЙ | 1999 |
|
RU2169970C2 |
| УСТРОЙСТВО N-КРАТНОГО ДИФФЕРЕНЦИРОВАНИЯ | 1999 |
|
RU2160922C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ БИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМОЙ | 2004 |
|
RU2280929C1 |
| ОПТИЧЕСКИЙ ГЕНЕРАТОР ХАОТИЧЕСКИХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1999 |
|
RU2150734C1 |
Изобретение относится к цифровой вычислительной технике и может быть использовано в системах цифровой обработки радиотехнических сигналов для решения задач оптимальной линейной фильтрации. Технический результат заключается в сокращении временных затрат при формировании оценки информационного процесса в измерительных системах. Устройство содержит блок вычисления оценки информационного процесса, состоящий из интегратора, двух элементов формирования произведения, элемент формирования разности, элемент формирования произведения невязки измерения и матричного коэффициента усиления, элемент формирования суммы, блок формирования и выдачи априорных данных, блок обращения матриц, блок формирования суммы, блок вычисления точностных коэффициентов. 3 ил.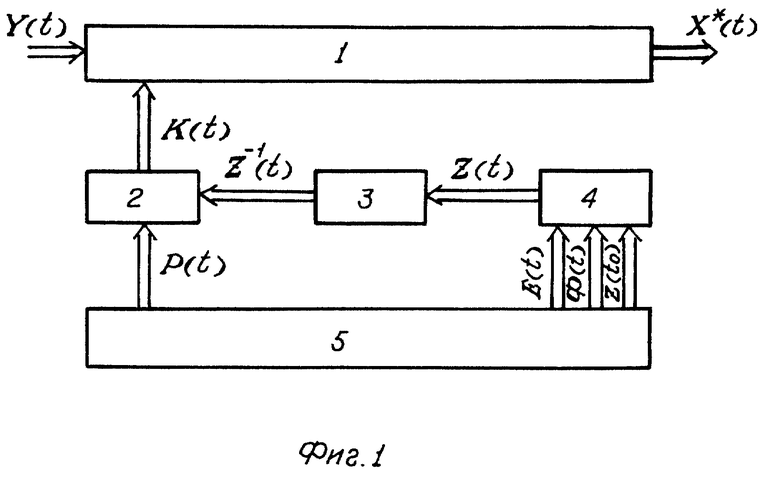
Декомпозиционный линейный фильтр, содержащий блок вычисления оценки информационного процесса, состоящий из интегратора, двух элементов формирования произведения, элемента формирования разности, элемента формирования произведения невязки измерения и матричного коэффициента усиления, элемента формирования суммы, причем выход интегратора соединен с информационным входом одного из элементов формирования произведения, выход которого соединен со вторым информационным входом элемента формирования разности, выход которого соединен с информационным входом элемента формирования произведения невязки измерения и матричного коэффициента усиления, выход которого соединен с первым информационным входом элемента формирования суммы, выход которого соединен с информационным входом интегратора, выход которого соединен с информационным входом другого из элементов формирования произведения, выход которого соединен со вторым информационным входом элемента формирования суммы, причем выход интегратора является выходом данного блока, а первый информационный вход элемента формирования суммы является входом данного блока, отличающийся тем, что в него введены блок формирования и выдачи априорных данных, блок обращения матриц, блок формирования суммы, блок вычисления точностных коэффициентов, при этом первый выход блока формирования и выдачи априорных данных соединен с первым информационным входом блока формирования суммы, выход которого соединен со вторым информационным входом блока вычисления оценки информационного процесса, первый информационный вход и выход которого являются соответственно входом и выходом устройства, второй, третий и четвертый выходы блока формирования и выдачи априорных данных соединены соответственно с первым, вторым и третьим информационными входами блока вычисления точностных коэффициентов, выход которого соединен с информационным входом блока обращения матриц, выход которого соединен со вторым информационным входом блока формирования суммы.
| ВЕНГЕРОВ А.А., ЩАРЕНСКИЙ В.А | |||
| Прикладные вопросы оптимальной линейной фильтрации | |||
| - М.: Энергоиздат, 1982, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| US 4752903 А, 21.06.1988 | |||
| US 5383145 A, 17.01.1995 | |||
| JP 60055477 A2, 30.03.1985. | |||
