Изобретение относится к строительно-монтажным работам по разборке высотных объектов с помощью летательного аппарата, в частности к демонтажу с помощью вертолета вертикальных длинномерных полых грузов, преимущественно пришедших в негодность дымовых труб. Кроме того, оно может быть использовано при демонтаже мачтово-башенных антенных сооружений и других конструкции, имеющих внутреннюю полость.
Известен способ демонтажа высотных полых грузов, включающий закрепление до прилета вертолета в верхней части груза монтажного стропа и размещение его снаружи вдоль груза так, чтобы нижний конец находился у основания груза (в месте, на котором обеспечивается безопасное и удобное выполнение подцепки), подлет и снижение вертолета с выпущенным канатом внешней подвески, соединение нижних концов монтажного стропа и каната, т.е. подцепку груза к внешней подвеске вертолета, натяжение вертолетом каната со стропом и подъем груза с проектных отметок (см. Барон Р.И., Макаров К.Н. Производство монтажных работ с помощью вертолетов. - М.: Стройиздат, 1984, рис.27, стр.48-49; а также "Монтаж строительных конструкций с применением вертолетов", ВСН 463-85, Минмонтажспецстрой СССР, 1986, стр.29-30, рис.19).
В известном способе исключается присутствие людей в опасной зоне - в верхней части груза, за которую осуществляется подцепка, и соответственно не требуется дополнительное время на вывод людей из этой зоны в экстремальных условиях под вертолетом. При использовании вертолетов с бортовой лебедкой, выпускающей короткий канат внешней подвески (вертолеты Ми-6, Ми-10К, Ми-26), обеспечивается сокращение длины гибкого маятника "короткий канат внешней подвески вертолета + монтажный строп" и всей системы "канат внешней подвески + монтажный строп + груз", что упрощает демонтаж высотного груза.
Однако при использовании вертолетов, не оснащенных лебедкой, связанной с внешней подвеской (вертолеты Ми-8, Ка-32 и др.), длина каната внешней подвески должна превышать длину монтажного стропа, чтобы обеспечить при подцепке груза гарантированное превышение вертолета над верхней точкой груза. Поэтому подъем демонтируемого груза с применением таких вертолетов приходится выполнять при помощи длинных канатов и стропов, а суммарная длина маятника на внешней подвеске вертолета ("канат внешней подвески + монтажный строп + груз") может более чем в три раза превышать высоту длинномерного груза, что затрудняет выполнение работы.
Кроме того, известный способ не всегда возможно использовать при демонтаже высотного груза, имеющего повреждения, в частности, при демонтаже прогоревшей дымовой трубы, т.к. не исключается возможность разрушения груза при его подъеме за верхнюю точку. Известный способ в этих случаях является небезопасным, т.к. непредсказуемы в процессе демонтажа изменения состояния груза и его динамическое воздействие на окружающие объекты, в т.ч. и на вертолет.
Известен другой способ демонтажа высотных полых грузов, наиболее близкий по технической сущности к заявляемому, т.е. являющийся прототипом. Этот способ включает следующие операции: присоединение к канату внешней подвески вертолета монтажного стропа до взлета, подлет к грузу и ввод нижнего конца монтажного стропа внутрь полости груза на всю его высоту посредством снижения вертолета, прикрепление этого конца к строповочному узлу в нижней части груза и подъем груза вертолетом (Солуянов Ю.М. Демонтаж дымовых труб с применением вертолетов. // Монтажные и специальные работы в строительстве. - 2000, N 3, стр. 2-8).
В этом способе монтажный строп может быть подсоединен к замку внешней подвески вертолета непосредственно или посредством штатных переходных звеньев: каната внешней подвески, силового наконечника, скоб и т.п. Поэтому в общем случае длина гибкого маятника "канат внешней подвески + монтажный строп" должна превышать высоту груза на величину безопасного расстояния между вертолетом и грузом при его подцепке.
При осуществлении этого способа, также как и в предыдущем, подцепка груза выполняется в удобном и безопасном месте. Основным достоинством этого способа является то, что в процессе демонтажа исключено неконтролируемое рассоединение частей груза, имеющего механические, коррозионные и др. повреждения. В случае деформации или разрушения груз и его части будут удерживаться на пропущенном внутри монтажном стропе (по типу гирлянды). Этот способ обеспечивает безопасность работ по удалению поврежденных высотных грузов как снятием, так и поворотом вокруг горизонтального шарнира, установленного в основании груза.
Недостатком этого способа является то, что на первом этапе работы используют гибкий маятник "канат внешней подвески + монтажный строп" большой длины (она должна превышать высоту длинномерного груза на величину безопасного превышения вертолета над грузом при его подцепке). Поэтому при зависании вертолета над грузом возможны большие погрешности наведения нижнего конца монтажного стропа на верхний обрез груза из-за большой амплитуды колебаний длинного гибкого маятника. Причем, как показывает опыт, с уменьшением величины соотношения d/h, т.е. диаметра d (внутреннего размера) полости груза к высоте h груза, вероятность ввода нижнего конца монтажного стропа в полость груза снижается (поскольку длина маятника растет, а размер отверстия, в которое надо попасть, может уменьшаться). Из-за этого выполнение работы может представлять трудную задачу, т.к. сопряжено с низкой точностью наведения вертолета на строительную ось груза на большой высоте висения вертолета (более двух высот груза, считая от его основания) и с большими колебаниями гибкого маятника.
Даже применение автоматизированных систем успокоения колебаний каната внешней подвески (монтажного стропа) не решает проблемы, поскольку выполнение своей задачи (гашение колебаний) могут завершать в случайном месте, расположенном на расстоянии, иногда в нескольких метрах, от точки включения в работу (один из авторов принимал участие в испытаниях такой системы на вертолете Ка-32, оказавшейся бесполезной при выполнении строительно-монтажных работ). Возможные повторные попытки ввода нижнего конца монтажного стропа в полость груза могут привести к увеличению затрат летного времени. Рост числа неудачных попыток ввода стропа в полость груза могут снижать вероятность выполнения всей работы этим способом в связи с накоплением психофизической усталости экипажа.
Повышение надежности выполнения операции по вводу вертолетом стропа в полость и сокращение времени на ее выполнение можно обеспечить, например, при посекционном демонтаже высотного груза за счет уменьшения его высоты и соответственно - длины гибкого маятника. В этом случае можно обеспечить увеличение соотношения d/h за счет уменьшения высоты h груза (за счет деления его на части - секции), и упростить ввод нижнего конца соответственно укороченного монтажного стропа внутрь полости. Но при этом высотный груз придется демонтировать за несколько подъемов, что приведет к увеличению затрат монтажной организации (за счет необходимости выполнения разъема груза на нескольких отметках) и к росту затрат летного времени.
Поэтому для повышения надежности ввода нижнего конца монтажного стропа в полость высотного груза и, в целом, повышения степени реальности безопасного демонтажа такого груза целиком (а не по частям) необходимо использовать другие, более совершенные приемы.
Задачей настоящего изобретения является достижение технического результата, заключающегося в повышении надежности ввода монтажного стропа в полость высотного груза, а также в снижении затрат дорогостоящего летного времени и затрат монтажной организации на демонтажные работы.
Указанный технический результат в способе демонтажа высотного полого груза, включающем присоединение к внешней подвеске летательного аппарата монтажного стропа, ввод нижнего его конца внутрь полости груза посредством снижения летательного аппарата, прикрепление этого конца в нижней части груза к строповочному узлу, натяжение стропа и подъем груза летательным аппаратом, достигается тем, что дополнительно применяют гибкую связь, которую до прилета летательного аппарата перегибают на верхнем обрезе груза, причем первый конец гибкой связи опускают снаружи до основания груза, а второй конец вводят внутрь полости груза с возможностью протягивания внутри груза всей гибкой связи в направлении к основанию груза, при подлете и снижении летательного аппарата к грузу нижний конец монтажного стропа соединяют с первым концом гибкой связи у основания груза, затем поднимают летательным аппаратом монтажный строп и одновременно втягивают гибкую связь за второй ее конец внутрь полости груза, при подходе нижнего конца монтажного стропа к верхнему обрезу груза выполняют его ввод в полость груза путем втягивания первого конца гибкой связи и снижения летательного аппарата, а при достижении нижним концом монтажного стропа строповочного узла на грузе производят их соединение.
Кроме того, длина монтажного стропа должна быть больше высоты груза, а длина гибкой связи может быть больше двух высот груза.
Наличие указанных признаков, в частности, такого нового признака, как дополнительная гибкая связь, посредством которой осуществляют гарантированный ввод нижнего конца монтажного стропа в полость груза при снижении требований к точности наведения на цель вертолета, а также новая совокупность операций обеспечивают снижение затрат летного времени и реальное выполнение демонтажа способом, исключающим опасные разрушения и деформации груза.
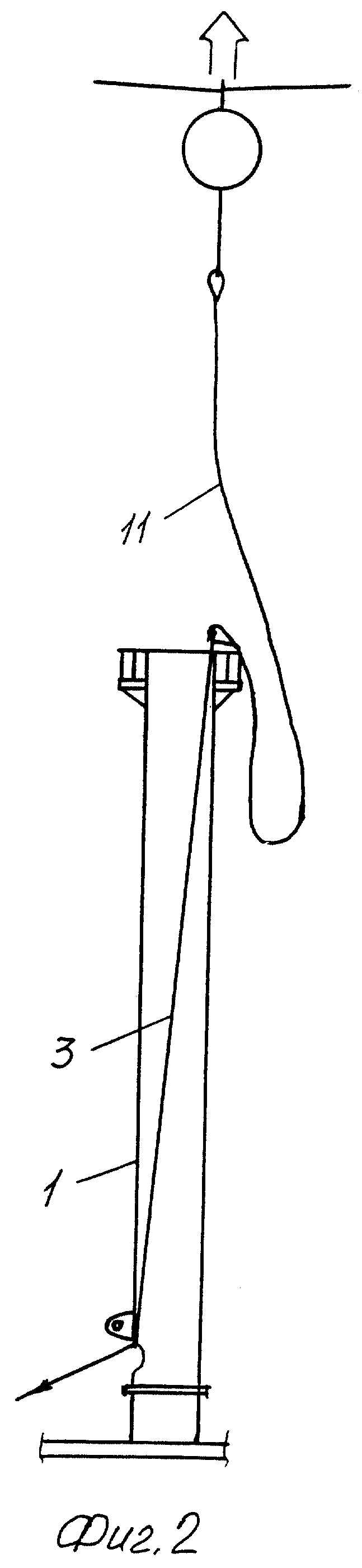
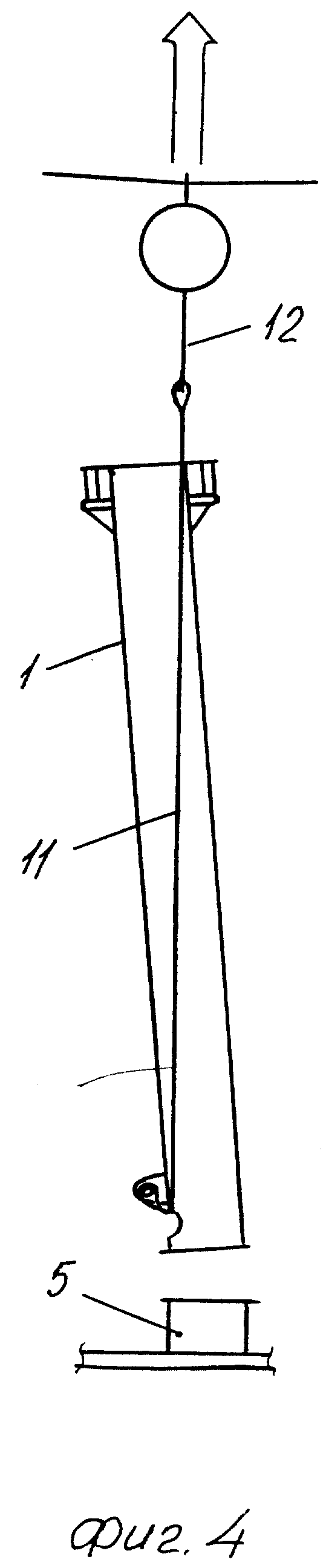
Сущность изобретения поясняется чертежами, где на фиг. 1 - 4 изображена последовательность операций по демонтажу высотного полого груза (показан в разрезе).
Способ осуществляют следующим образом. При подготовке к демонтажу груза, например, дымовой трубы 1, с ее верхней площадки 2 или с лестницы (не показана) на верхней кромке (обрезе) перегибают гибкую связь 3 (веревку, тонкий трос и т.п.). Первый конец 4 гибкой связи 3 опускают снаружи трубы к ее основанию 5, к удобному и безопасному месту, например на нижнюю площадку 6, имеющую большие размеры (больше, чем диаметр трубы 1). Другой конец 7 гибкой связи 3 вводят внутрь трубы 1, опускают там к ее основанию 5 и выводят вниз через основание или наружу через отверстие 8. При отсутствии удобной площадки у основания 5 концы 4 и 7 выводят на другие пригодные площадки, имеющиеся на объекте. Длину гибкой связи 3 подбирают такой, чтобы за свободный конец 7 было удобно переместить через верхнее отверстие трубы 1 внутри нее в направлении к основанию 5 всю гибкую связь 3, включая конец 4. Исходя из этих требований, длина гибкой связи 3 должна быть больше высоты трубы 1 более чем в два раза. В нижней части трубы 1 подготавливают строповочный узел 9.
Перед взлетом к внешней подвеске вертолета 10 подцепляют монтажный строп 11, который может быть подсоединен непосредственно к замку внешней подвески (не показан) или посредством штатного каната 12 внешней подвески. Длина стропа 11 вместе с канатом 12 должна быть больше высоты трубы на величину безопасного расстояния между вертолетом 10 и грузом 1 при подцепке. Это обеспечивает заход вертолета на демонтаж и предварительное наведение нижнего конца монтажного стропа 11 на площадку 6 на высоте, несколько большей, чем две высоты груза (считая от его основания). Снижением вертолета подают конец монтажного стропа 11 на нижнюю площадку 6, где к нему присоединяют конец 4 гибкой связи 3 (фиг. 1). При этом особых требований к точности прицеливания не предъявляется - необходимо лишь подать нижний конец стропа 11 в любое место площадки 6.
После соединения с гибкой связью 3 монтажный строп 11 поднимают вертолетом и одновременно втягивают гибкую связь 3 за конец 7 внутрь трубы 1. Возможны два варианта подъема монтажного стропа 11. При первом варианте монтажный строп поднимают вертолетом на всю его длину над трубой 1. Второй вариант более производительный - одновременно с подъемом монтажного стропа 11 за его верхний конец вертолетом 10, его нижний конец поднимают к обрезу трубы 1 посредством втягивания внутрь трубы гибкой связи 3. При подходе нижнего конца стропа 11 к обрезу трубы (фиг. 2) его втягивают внутрь полости путем протягивания всей гибкой связи 3 и ее конца 4 вниз до строповочного узла 9. Здесь производят соединение нижнего конца стропа 11 с узлом 9 (фиг. 3). После их присоединения вертолетом предварительно натягивают канат внешней подвески 12 с монтажным стропом 11. Гибкую связь 3 отсоединяют от стропа 11. Связь 3 можно не отсоединять, если будет необходимость ее использовать в качестве фала в процессе демонтажа. Открепив трубу 1 (сняв последние болты на фланце, подрезав оттяжки и пр.), увеличивают натяжение каната 12 и монтажного стропа 11 и осуществляют подъем груза вертолетом с основания 5 (фиг. 4).
По предлагаемому способу демонтаж производится при большой начальной длине гибкого маятника - больше, чем высота груза (как в прототипе). Но, несмотря на это, обеспечивается гарантированный ввод нижнего конца монтажного стропа внутрь груза посредством дополнительной гибкой связи. Это облегчает выполнение работы, т.к. не требуется точное центрирование вертолета над грузом перед вводом монтажного стропа внутрь груза и в процессе его ввода на всю длину до строповочного узла, и позволяет сократить затраты летного времени.
Таким образом обеспечивается выполнение безопасного демонтажа поврежденного груза с гарантированным вводом монтажного стропа в полость и закреплением его в нижней части груза. Способ отработан в летных испытаниях с применением вертолета Ми-26Т.
Способ может быть использован как при плановых работах по реконструкции высотных объектов с лестницами и площадками обслуживания, так и при аварийно-восстановительных работах с участием менее опытных экипажей (по сравнению с прототипом).
Способ целесообразен в случаях, когда затруднительно применение такого приема, как предварительное складывание каната внешней подвески и монтажного стропа на вертолете из-за их высокой жесткости при большой толщине (например, на тяжелых вертолетах их диаметр может быть 30 - 40 мм и более).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОНТАЖА ВЫСОТНЫХ ПОЛЫХ ГРУЗОВ С ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170691C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2196709C2 |
| СПОСОБ МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2136547C1 |
| РАБОЧАЯ ПЛОЩАДКА И СПОСОБ ЕЕ ПОДВЕСКИ | 1991 |
|
RU2020230C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2372252C2 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2308400C2 |
| Вертолетная внешняя подвеска | 2015 |
|
RU2608824C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307064C2 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 2005 |
|
RU2286306C1 |

Изобретение относится к строительно-монтажным работам по разборке высотных объектов с помощью летательного аппарата. Способ включает присоединение к внешней подвеске летательного аппарата монтажного стропа, ввод нижнего конца монтажного стропа внутрь полости груза посредством снижения летательного аппарата, прикрепление этого конца в нижней части груза к строповочному узлу, натяжение стропа и подъем груза летательным аппаратом. При этом применяют гибкую связь, которую до прилета летательного аппарата перегибают на верхнем обрезе груза, причем первый конец гибкой связи опускают снаружи до основания груза, а второй конец вводят внутрь полости груза с возможностью протягивания внутри груза всей гибкой связи в направлении к основанию. При подлете летательного аппарата нижний конец монтажного стропа соединяют с первым концом гибкой связи у основания груза, втягивают гибкую связь за второй ее конец внутрь полости груза при одновременном подъеме летательным аппаратом монтажного стропа, а при подходе нижнего конца монтажного стропа к верхнему обрезу груза осуществляют его ввод в полость груза путем втягивания гибкой связи и снижения летательного аппарата, а при достижении нижним концом монтажного стропа строповочного узла на грузе производят их соединение. Изобретение обеспечивает повышение надежности ввода монтажного стропа в полость высотного груза и снижение летного времени при проведении демонтажных работ. 2 з.п.ф-лы, 4 ил.
| СОЛУЯНОВ Ю.М | |||
| Демонтаж дымовых труб с применением вертолетов | |||
| Монтажные и специальные работы в строительстве, №3, 2000, с.2-8 | |||
| US 4378919 А, 05.04.1983 | |||
| RU 20009102 С1, 15.03.1994. |

