Изобретение относится к авиационной технике, а именно к оборудованию летательных аппаратов, в частности вертолетов, предназначенных для транспортирования груза на внешней подвеске, и может быть использовано при выполнении строительно-монтажных работ.
Известно устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата, включающее траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся у замка связей, систему стабилизации траверсы, содержащую упругие связи, и систему ориентации траверсы в горизонтальной плоскости (авт. свид. СССР №981206, кл. B66F 11/02, 1981). Основной недостаток известного устройства - невозможность управлять в полете поворотом груза по азимуту (вокруг вертикальной оси) из-за отсутствия в системе ориентации траверсы таких важных признаков, как привод с исполнительными звеньями. Другой недостаток заключается в том, что упругие связи системы стабилизации присоединены к траверсе не непосредственно, а с помощью дополнительного элемента - поперечной жесткой тяги, что снижает эффективность стабилизации, усложняет устройство и повышает металлоемкость.
Известно также устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата по патенту РФ №2028968, кл. B64D 9/00, Е04Н 12/34, 1992 г. Оно включает траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся у замка связей, систему стабилизации траверсы, содержащую упругие связи, и систему ориентации траверсы в горизонтальной плоскости с приводом и исполнительными звеньями, присоединенными к обоим концам траверсы. Каждое из двух исполнительных звеньев выполнено в виде управляемого силового цилиндра двухстороннего действия. Противоположные от траверсы концы этих исполнительных звеньев соединены вместе, и в этой точке к ним прикреплены упругие связи, соединенные с фюзеляжем летательного аппарата, что образует систему стабилизации траверсы. В точке соединения силовых цилиндров установлена опорная пята, прижимаемая к фюзеляжу вертикальными составляющими сил, действующих от упругих связей. При согласованном изменении длины силовых цилиндров (один укорачивается, а другой - удлиняется) возможен поворот траверсы и соответственно груза на некоторый угол по азимуту для совмещения его с проектными отметками при монтаже без изменения положения зависшего вертолета. Причем, из-за отсутствия жесткой опоры для противоположных (от траверсы) концов силовых цилиндров, возникающий при этом реактивный момент гасится стабилизирующим моментом, создаваемым упругими связями системы стабилизации. Отсутствие точки фиксации опорной пяты (т.е. фиксированной точки опоры) может приводить к ее неопределенным перемещениям со скольжением по специальной плите, усиливающей фюзеляж снизу.
Присоединение упругих связей не к самой траверсе (не к ее концам), а посредством промежуточных звеньев (цилиндров) снижает эффективность стабилизации траверсы. Кроме того, к недостаткам можно отнести сложность этого устройства и необходимость доработки летательного аппарата. Из-за больших габаритов известное устройство трудно применить на вертолетах с малым клиренсом на стоянке.
Наиболее близким по технической сущности, т.е. прототипом, является устройство для азимутальной ориентации груза на внешней подвеске летательного аппарата по патенту РФ №2196709, кл. B64D 9/00, 2000 г. Оно включает траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся у замка летательного аппарата связей, систему стабилизации траверсы, содержащую упругие связи, и систему ориентации траверсы в горизонтальной плоскости с приводом и исполнительным звеном. В качестве привода может быть использована лебедка, установленная на борту вертолета. Исполнительное звено может быть выполнено в виде практически нерастяжимой гибкой тяги, например троса, передающего на траверсу крутящий момент в одном направлении, а упругие связи выполнены в виде эластичных гибких тяг (шнуровых резинотканных амортизаторов) с возможностью передачи стабилизирующего момента в противоположном направлении.
В известном устройстве упругие связи системы стабилизации траверсы присоединены к одному из концов траверсы, а исполнительное звено системы ориентации траверсы (трос) прикреплено к ее противоположному концу.
При использовании в качестве привода аварийно-спасательной лебедки, имеющейся практически на каждом вертолете, известное устройство не всегда обеспечивает необходимую точность поворота груза по азимуту. Это связано с высокими скоростями перемещения исполнительного звена (троса) аварийно-спасательных лебедок, поскольку назначение этих лебедок - спуск и подъем людей в экстремальных ситуациях. В результате большой скорости исполнительного троса повороты траверсы происходят с динамическими нагрузками, которые приводят к крутильным колебаниям груза. Поэтому для точного наведения груза и успокоения его колебаний необходимо дополнительное время висения вертолета над местом монтажа. Поскольку балансировка вертолета при висении (т.е. удержание на месте) является наиболее сложной по пилотированию в сравнении с другими стадиями полета, экипаж вертолета испытывает большие дополнительные психофизические нагрузки в период увеличивающегося времени висения.
Задачей настоящего изобретения является устранение указанного недостатка и достижение нового технического результата.
В предлагаемом устройстве для азимутальной ориентации груза на внешней подвеске летательного аппарата новый технический результат заключается в снижении динамических нагрузок в приводе траверсы, в повышении точности манипулирования грузом по азимуту при выполнении строительно-монтажных работ, в уменьшении летного времени на выполнение монтажных операций и, как следствие, - в повышении производительности экипажа при меньших психофизических нагрузках.
Этот технический результат в устройстве для азимутальной ориентации груза на внешней подвеске летательного аппарата, содержащем траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся у замка летательного аппарата связей, систему стабилизации траверсы, содержащую основную упругую связь, прикрепленную к одному из концов траверсы и корпусу летательного аппарата, систему ориентации траверсы в горизонтальной плоскости с установленным на корпусе летательного аппарата приводом, исполнительное звено которого выполнено в виде троса и присоединено к противоположному концу траверсы, достигается тем, что на противоположном конце траверсы и на корпусе летательного аппарата дополнительно установлены блоки, а исполнительное звено поочередно огибает эти блоки с образованием полиспаста, а между свободным концом исполнительного звена и корпусом летательного аппарата введена дополнительная упругая связь. При этом жесткость дополнительной упругой связи должна быть меньше, чем жесткость основной упругой связи.
Сила упругости основной упругой связи должна быть меньше тягового усилия в исполнительном звене, умноженного на кратность полиспаста.
К концам дополнительной упругой связи может быть параллельно присоединен страховочный нерастяжимый элемент, длина которого больше начальной длины дополнительной упругой связи, но меньше предельной, при которой происходит разрушение этой упругой связи.
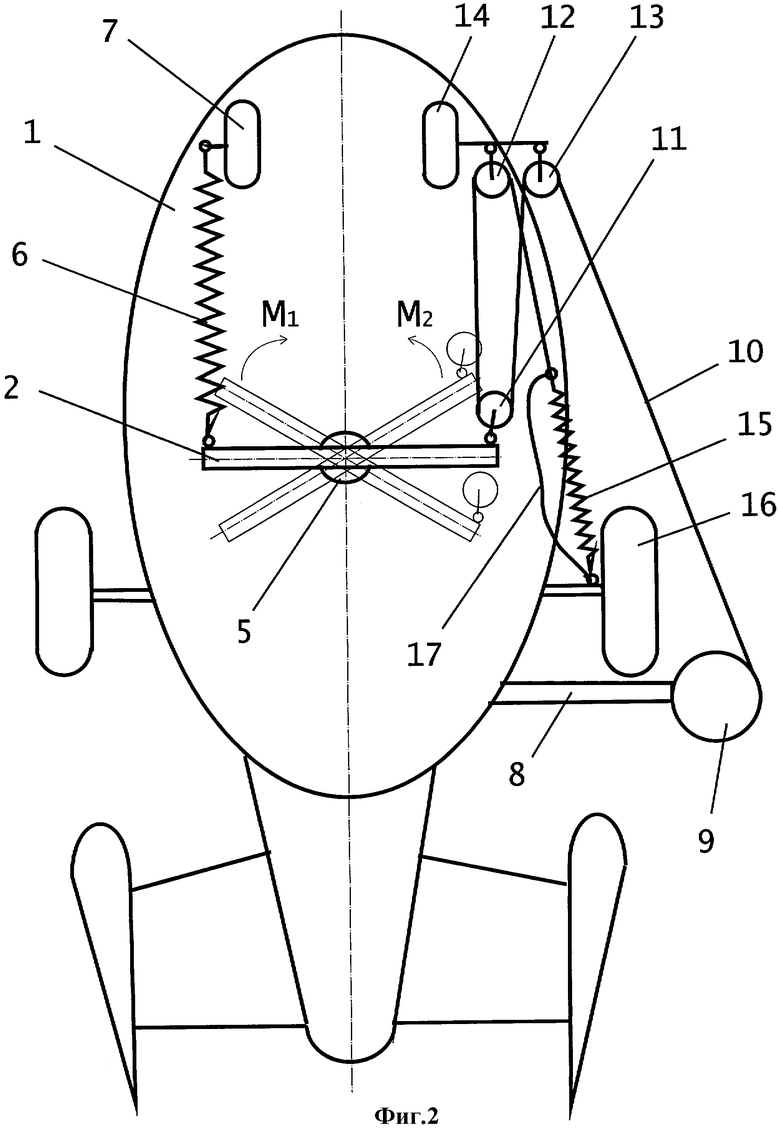
На фиг.1 представлен общий вид летательного аппарата с предлагаемым устройством (с одним из частных случаев выполнения устройства - упрощенно), вид спереди;
на фиг.2 - общий вид снизу на летательный аппарат с устройством (грузовые канаты не показаны).
Перед выполнением строительно-монтажных работ предлагаемое устройство устанавливают на вертолет 1.
Устройство содержит траверсу 2 с грузовыми канатами 3, которые снизу снабжены грузозахватами (крюками или электрозамками - не показаны). Траверса 2 посредством двух сходящихся связей 4 подсоединена к вертлюгу 5 и основному замку (не показан) вертолета снизу фюзеляжа.
Устройство имеет систему стабилизации траверсы, содержащую основную упругую связь 6, прикрепленную к одному из концов траверсы 2 и к корпусу летательного аппарата, например к стойке переднего колеса 7 (фиг.2). Основная упругая связь 6 может быть выполнена в виде одного или нескольких элементов, например резинотканных шнуровых амортизаторов, пружин и т.п.
Устройство имеет также систему ориентации траверсы 2, в которую входит привод, например установленная на стреле 8 аварийно-спасательная лебедка 9. Исполнительным звеном лебедки 9 является практически нерастяжимая гибкая тяга - трос 10, навитый на барабан лебедки. Трос 10 посредством блоков 11, 12 и 13 соединен с противоположным концом траверсы 2. На этом конце траверсы 2 шарнирно закреплен блок 11, а на стойке переднего колеса 14 шарнирно закреплены блоки 12 и 13. Трос 10 поочередно огибает эти блоки с образованием двукратного полиспаста, у которого блок 11 является подвижным, а блоки 12 и 13 - неподвижные. При установке большего количества блоков возможно образование полиспаста большей кратности. Свободный конец исполнительного троса 10, сбегающий с блока 12, присоединен к дополнительной упругой связи 15, прикрепленной к корпусу вертолета 1, например к стойке основного колеса 16. Дополнительная упругая связь 15 может быть выполнена в виде одного или нескольких элементов, например, резинотканных шнуровых амортизаторов, пружин и т.п.
Во всех частных случаях исполнения упругих связей жесткость дополнительной упругой связи 15 должна быть меньше (т.е. она должна быть более эластичной), чем жесткость основной упругой связи 6. При этом максимальная сила упругости основной упругой связи 6 (которая достигается в конце ее деформации - вытяжки) должна быть меньше номинального тягового усилия лебедки 9, умноженного на кратность полиспаста. Последнее необходимо для превышения управляющего момента от лебедки над моментом сопротивления от основной упругой связи 6, т.е.:

где M1 - момент, действующий на траверсу 2 от основной упругой связи 6 на плече, равном половине длины траверсы 2 (т.е. радиус R);
F1 - сила упругости основной упругой связи 6;
М2 - момент, действующий на траверсу 2 от полиспаста;
Fп - сила, развиваемая полиспастом;
β - угол поворота траверсы 2.
В тоже время по закону полиспаста: 
где F2 - тяговое усилие лебедки (до полной вытяжки дополнительной упругой связи 15 это усилие равно ее силе упругости, а при полной вытяжке - это номинальное усилие лебедки);
k - кратность полиспаста.
Тогда из соотношения (1) с учетом (2) имеем:

т.е. показана необходимость такого соотношения сил упругости основной упругих связей и тягового усилия лебедки.
К концам дополнительной упругой связи 15 параллельно присоединен страховочный нерастяжимый элемент, например трос 17, длина которого больше начальной длины дополнительной упругой связи 15, но меньше предельной, при которой происходит разрушение этой упругой связи. Прочность на разрыв страховочного троса 17 и исполнительного троса 10 одинакова.
Эти условия обеспечивают работоспособность устройства.
Устройство работает следующим образом.
Перед взлетом вертолета устройство находится в нерабочем (посадочном) положении. В этом положении из-за отсутствия груза и соответственно отсутствия вертикальной нагрузки от канатов 3 на траверсу 2, основная упругая связь 6 имеет минимальную длину. Длину исполнительного троса 10 также уменьшают соответственно, наматывая его на барабан лебедки 9 и преодолевая силу упругости дополнительной связи 15. В результате укорачивания троса 10 подвижный блок 11 приближают к неподвижным блокам 12 и 13, а дополнительная упругая связь 15 находится в растянутом состоянии. Таким образом, за счет приложения к обоим концам траверсы 2 усилий, направленных к передним колесам 7 и 14, а также за счет поворота в кардане вертлюга 5, все элементы устройства, включая траверсу 2 со сходящимися связями 4, участок исполнительного троса 10, находящийся между блоками 11, 12 и 13, и упругие связи 6 и 15, находятся в непосредственной близости от фюзеляжа вертолета 1. Поэтому устройство в таком нерабочем положении может размещаться в небольшом просвете (клиренсе) между фюзеляжем вертолета и стояночной площадкой.
После взлета вертолета 1 включением лебедки 9 "на выпуск" увеличивают длину исполнительного звена - троса 10. Этим подготавливают устройство к рабочему положению, которое оно занимает после подцепки груза 18. При подцепке груза и натяжении вертолетом канатов 3 под действием силы тяжести груза 18 (см. фиг.1) траверса 2 вместе со связями 4 и вертлюгом 5 располагаются в вертикальной плоскости, проходящей через ось подвеса груза (т.е. вертикальную ось, проходящую через замок вертолета). Изменением длины исполнительного троса 10 разворачивают траверсу 2 на вертлюге 5 вокруг вертикальной оси на необходимый угол по азимуту до достижения траверсой исходного (поперечного) положения для транспортирования груза 18 (на фиг.2 это положение траверсы изображено основными сплошными линиями). Длина основной 6 и дополнительной 15 упругих связей выбрана так, что в поперечном (исходном) положении траверсы 2 эти упругие связи растянуты на половину рабочего хода.
После подцепки грузовых канатов 3 к грузу 18 его поднимают и доставляют к месту монтажа. При возникновении в полете колебаний груза 18 устройство обеспечивает их гашение и стабилизацию груза. Например, при возникновении продольных и поперечных маятниковых или крутильных колебаний стабилизация груза будет обеспечиваться за счет сил упругости при растяжении связей 6 и 15. Они обеспечат затухание указанных колебаний, т.к. являются диссипативной системой.
При зависании вертолета 1 над местом монтажа против ветра, при помощи устройства (не изменяя выгодное положение вертолета) устраняют рассогласование груза 18 по азимуту с проектным его местоположением, например с предыдущей секцией груза 19 (трубы или другой металлоконструкцией). Для этого путем изменения длины троса 10 поворачивают траверсу 2 из исходного положения на необходимый угол до совмещения характерных меток или узлов, например, лестниц 20 и 21 (фиг.1).
При включении лебедки 9 "на выпуск" трос 10 удлиняется, и траверса 2 поворачивается по часовой стрелке под действием крутящего момента M1, развиваемого силой упругости основной связи 6 на плече, равном половине длины траверсы.
При включении лебедки 9 в режиме "на уборку", когда длина троса 10 уменьшается за счет навивки на барабан, обеспечивается поворот траверсы 2 против часовой стрелки крутящим моментом M2, действующим на траверсу от силы, возникающей в полиспасте, на плече, равном половине длины траверсы. (На фиг.2 тонкими линиями отображены возможные варианты поворота траверсы 2 по часовой стрелке и против нее.)
В обоих случаях включения лебедки 9 линейная скорость оси блока 11 меньше линейной скорости исполнительного троса 10 по закону полиспаста. Во столько же раз меньше линейная скорость концов траверсы 2 при ее повороте и, следовательно, поворот траверсы происходит с соответственно меньшей угловой скоростью и меньшими динамическими нагрузками. Причем в момент начала движения (страгивания) исполнительного торса 10 первой начинает изменять длину дополнительная упругая связь 15 за счет своей меньшей жесткости. В результате динамические нагрузки при пуске привода (лебедки) сглаживаются и демпфируются. При дальнейшем движении троса 10 происходит многократное изменение длины дополнительной упругой связи 15 (за счет меньшей жесткости) по сравнению с основной упругой связью 6 в соответствии с кратностью полиспаста (по фиг.2 - двукратное). Поэтому при укорачивании троса 10 происходит плавный поворот траверсы 2 против часовой стрелки. При дальнейшем укорачивании троса 10 дополнительная упругая связь 15 вытянется на всю свою длину раньше, чем основная упругая связь 6. В этом случае вступает в работу страховочный трос 17, который в натянутом состоянии, исключая разрушение дополнительной упругой связи 15, совместно с тросом 10 (являясь его продолжением) передает крутящий момент M2. Основная упругая связь 6 до полной своей вытяжки создает момент сопротивления M1, который меньше управляющего М2.
При выпуске троса 10 лебедкой 9 управляющим становится момент M1 от основной упругой связи 6, и траверса 2 (и соответственно груз 18) плавно поворачивается по часовой стрелке.
После поворота траверсы 2 с грузом 18 до совмещения узлов 20 и 21, снижением вертолета 1 груз 18 устанавливают на место 19 и производят отцепку грузозахватов канатов 3. Вернув траверсу 2 в исходное (поперечное) положение, вертолет направляют за следующим грузом или на посадку.
Перед посадкой устройство приводят в посадочное положение, т.е. складывают, как было описано вначале. В таком положении устройство не препятствует посадке вертолета с малым клиренсом на стоянке, например вертолета типа Ка-32.
В предлагаемом устройстве обеспечивается снижение динамических нагрузок в системе ориентации траверсы. С повышением кратности полиспаста возможно приведение динамических нагрузок в устройстве к минимуму. В результате возможно повышение точности наведения груза на проектные отметки и сокращение времени висения вертолета, необходимого для монтажа груза.
Изобретение относится к авиационной технике, а именно к оборудованию летательных аппаратов, предназначенных для транспортирования груза на внешней подвеске, и может быть использовано при выполнении строительно-монтажных работ. Устройство содержит траверсу с грузовыми канатами на концах, соединенную с замком вертолета посредством сходящихся у замка связей, систему стабилизации траверсы, содержащую упругие связи, и систему ориентации траверсы в горизонтальной плоскости с приводом в виде лебедки и исполнительным звеном - тросом. К одному концу траверсы присоединена основная упругая связь системы стабилизации, а к противоположному концу траверсы присоединено исполнительное звено - трос лебедки посредством нескольких блоков. Один или несколько блоков установлены на противоположном конце траверсы, а другие блоки прикреплены к корпусу вертолета. Трос лебедки поочередно огибает блоки с образованием полиспаста, у которого блоки, прикрепленные к траверсе, являются подвижными, а блоки, закрепленные на корпусе вертолета, - неподвижными. Конец троса, сходящий с полиспаста, подсоединен к дополнительной упругой связи, жесткость которой меньше, чем у основной упругой связи. За счет этого и за счет применения полиспаста снижаются динамические нагрузки в приводе траверсы, сокращается продолжительность колебаний груза и повышается точность монтажа. Упругие связи стабилизирующей системы могут быть выполнены в виде резиновых амортизаторов или пружин. Положение груза стабилизируется за счет сил сопротивления, возникающих в обеих упругих связях при изменении их длины. Техническим результатом заявленного изобретения является снижение динамических нагрузок в приводе траверсы, повышение точности манипулирования грузом по азимуту при выполнении строительно-монтажных работ. 2 з.п. ф-лы, 2 ил.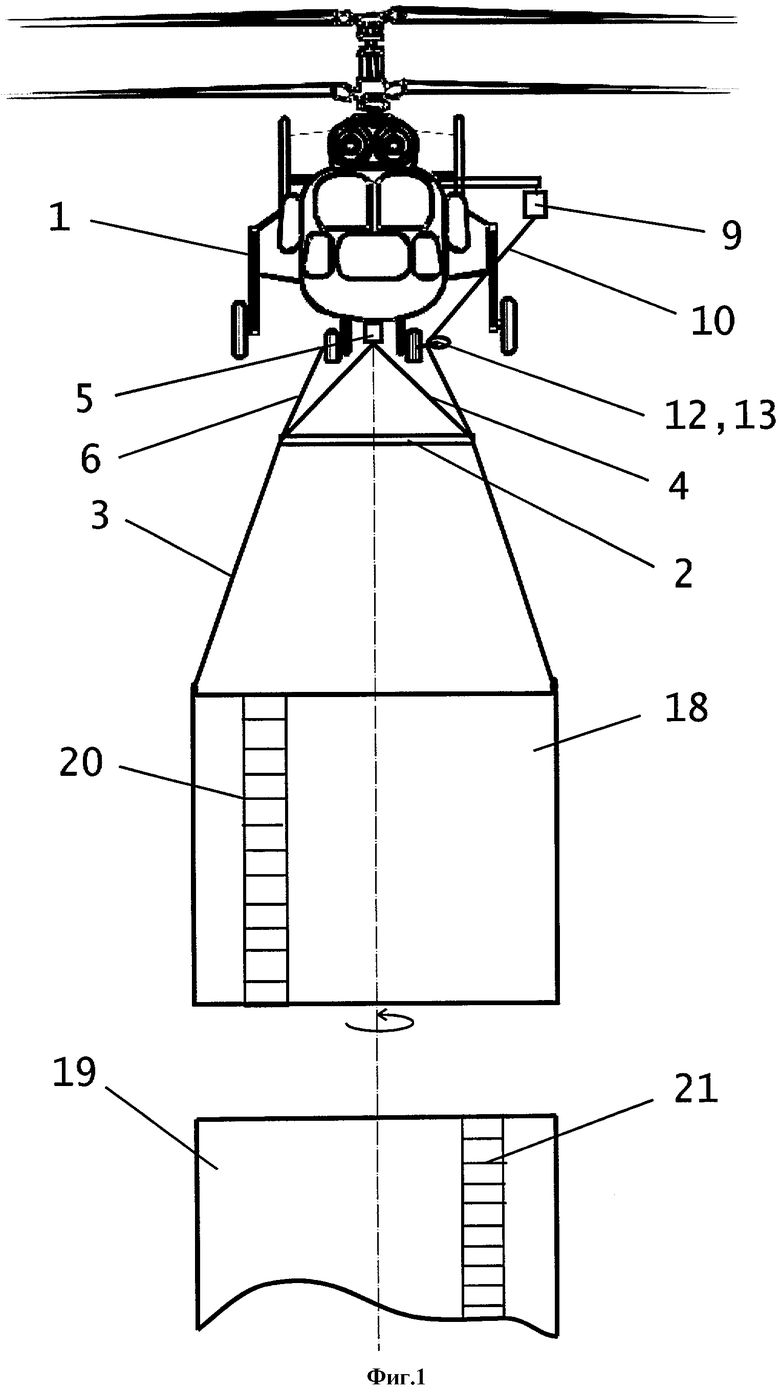
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2196709C2 |
| Устройство для монтажа конструкций летательным аппаратом | 1981 |
|
SU981206A1 |
| US 4378919 A, 05.04.1983. | |||

