Изобретение относится к области строительно-монтажных работ с помощью летательного аппарата, в частности вертолета, и может быть использовано в различных отраслях экономики, где необходимо установить груз в проектное положение в стесненных условиях или в сжатые сроки.
Известен способ монтажа груза с помощью летательного аппарата, включающий закрепление груза снизу аппарата посредством подвески, подъем летательного аппарата и транспортировку груза со стабилизацией его положения за счет горизонтальных составляющих сил, возникающих при взаимодействии подвески с оборудованием аппарата, и последующую установку груза в проектное положение. Известный способ осуществляют посредством устройства по патенту США N 437919, кл. 244-118, опубл. 1983 г. Недостатком известного способа является то, что в решающий период установки груза на монтажный стык не обеспечивают стабилизацию положения груза в плане (по азимуту).
Известен также способ монтажа груза с помощью летательного аппарата, включающий закрепление груза снизу аппарата посредством подвески, подъем летательного аппарата и транспортировку груза со стабилизацией его положения за счет горизонтальных составляющих сил, возникающих при взаимодействии подвески с оборудованием аппарата, и последующую установку груза в проектное положение ( патент РФ N 2023650, кл. B 66 F 11/02, E 04 C 21/26, 1992 г). Устройство для осуществления этого способа содержит сопряженные с замком летательного аппарата грузовые канаты с жестко закрепленной между ними траверсой и стабилизатор вращения груза, смонтированный на подвеске (патент РФ N 2009102, кл. B 66 F 11/02, 1992 г). Недостатком этого устройства является то, что оно стабилизирует груз только в одном положении, заданном на земле перед взлетом аппарата. В результате способ монтажа груза может содержать непроизводительные операции по возвращению летательного аппарата с монтажной площадки на грузовую для переподцепки груза.
Наиболее близким по технической сущности является способ монтажа груза с помощью летательного аппарата, включающий закрепление груза снизу аппарата посредством подвески, подъем летательного аппарата и транспортировку груза со стабилизацией его положения за счет горизонтальных составляющих сил, возникающих при взаимодействии подвески с оборудованием аппарата, последующую ориентацию груза по азимуту и установку в проектное положение. Этот способ осуществляют с помощью устройства по патенту РФ N 2028968, кл. B 64 D 9/00, E 04 H 12/34, 1992г, включающего траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством сходящихся у замка связей, и ориентирующую систему. Последняя выполнена в виде двух жестких телескопических тяг с приводом, присоединенных к траверсе. Недостатки устройства заключаются в малом угле поворота груза, малоэффективном использовании тягового усилия от привода, специально установленного на летательный аппарат, и больших габаритах, что не исключает в способе монтажа с помощью этого устройства непроизводительных затрат на переподцепку груза.
Задачей настоящего изобретения является устранение указанных недостатков и достижение нового технического результата,
Для предлагаемого способа монтажа груза технический результат заключается в эффективном использовании штатного оборудования летательного аппарата, обычно не используемого при выполнении строительно-монтажных работ. Кроме того, сокращаются непроизводительные операции на переподцепку груза за счет расширения технологических возможностей по ориентированию груза в процессе его установки в проектное положение.
Указанный технический результат в способе монтажа груза с помощью летательного аппарата, включающем закрепление груза снизу летательного аппарата посредством подвески, подъем летательного аппарата и транспортировку груза со стабилизацией его положения за счет горизонтальных составляющих сил, возникающих при взаимодействии подвески с оборудованием летательного аппарата, последующую ориентацию и установку груза в проектное положение, достигается тем, что в качестве привода системы ориентации груза в горизонтальной плоскости используют штатное грузоподъемное оборудование, установленное на летательном аппарате.
В предлагаемом устройстве для выполнения способа монтажа технический результат заключается в увеличении угла поворота траверсы, в увеличении крутящего момента на траверсе за счет создания лучших условий передачи управляющих усилий, в снижении массы устройства за счет исключения необходимости установки на летательный аппарат специальных приводов гибких тяг.
Этот технический результат в устройстве для монтажа груза с помощью летательного аппарата, содержащем траверсу с грузовыми канатами на концах, соединенную с замком летательного аппарата посредством связей, сходящихся у замка, привод и тяги системы ориентации груза в горизонтальной плоскости, присоединенные одним концом к траверсе, достигается за счет введения отклоняющих блоков, закрепленных на летательном аппарате на наибольшем расстоянии от замка, использования штатного грузоподъемного оборудования в качестве привода системы ориентации груза, а также за счет выполнения тяг гибкими, огибания ими отклоняющих блоков и запасовки их противоположных концов в штатное грузоподъемное оборудование летательного аппарата. Кроме того, траверса может быть снабжена управляемыми замками, к которым присоединены гибкие тяги. На концах траверсы могут быть установлены втулки с возможностью вращения вокруг продольной оси траверсы; к каждой из втулок, перпендикулярно траверсе, может быть прикреплен рычаг с возможностью поворота в направлении от центра траверсы и возврата в исходное положение, а на каждом рычаге может быть установлен управляемый замок для присоединения тяги. Присоединенные к траверсе концы тяг могут быть дополнительно прикреплены к фюзеляжу гибкими связями.
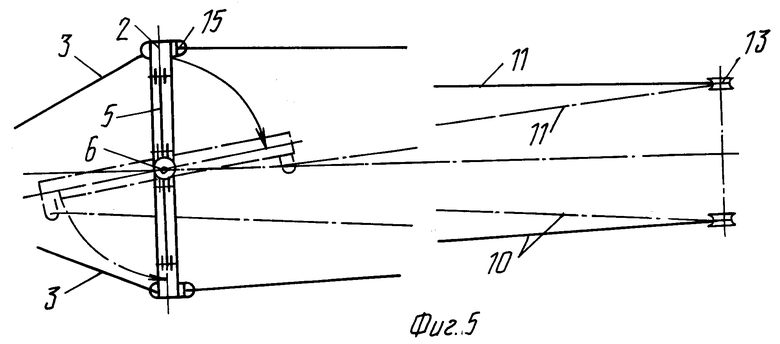
На фиг. 1 - 3 представлена последовательность операций; на фиг. 4 - вид сбоку на устройство для осуществления способа; на фиг. 5 - схема одного из возможных вариантов устройства (вид сверху без летательного аппарата); на фиг. 6 - схема другого варианта устройства.
В реализации способа принимает участие летательный аппарат - вертолет 1. Его оснащают внешней подвеской, включающей траверсу 2 с грузовыми канатами 3, которые снизу снабжены грузозахватами 4 (крюками или электрозамками). Траверсу 2 посредством двух сходящихся связей 5, вертлюга 6 и наконечника 7 с карданами подцепляют к основному замку 8 вертолета. Указанная внешняя подвеска входит в устройство для осуществления способа монтажа груза 9. Кроме нее устройство включает ориентирующую систему, в которую входят гибкие тяги 10 и 11, подсоединенные одним концом к траверсе 2, а другим к приводу 12. В качестве привода используют штатное грузоподъемное оборудование, имеющееся на вертолете, например лебедки, тельферы и т.п. Для обеспечения максимальной величины горизонтальных составляющих сил, действующих в тягах 10 и 11, последние пропускают через отклоняющие блоки 13, закрепленные на небольшом расстоянии от замка 8, например на грузовом трапе 14 (см. фиг. 4). На траверсе 2 для прикрепления гибких тяг 10 и 11 могут быть установлены управляемые замки 15 (см. фиг. 5). Для увеличения плеча действия управляющих сил при поворотах траверсы 2 на ее концах устанавливают дополнительные приспособления. К ним относятся втулки 16, которые имеют возможность вращения вокруг продольной оси траверсы 2. К втулкам 16 перпендикулярно траверсе шарнирно прикреплены рычаги 17 с возможностью поворота только в направлении от центра траверсы и возврата в исходное положение - перпендикулярно траверсе. Поворот рычагов 17 из исходного положения к центру траверсы 2 исключен упорами. Движение втулок 16 вдоль траверсы 2 также исключено упорами (не показаны). На концах рычагов 17 могут быть установлены управляемые замки 15 (см. фиг.6). Дополнительно концы тяг 10 и 11 могут быть прикреплены страховочными тросиками 18 к фюзеляжу вертолета (см. фиг. 4).
Способ осуществляют следующим образом.
После взлета вертолета 1 включением лебедок 12 траверсу 2 устанавливают в положение, при котором она вместе со сходящимися связями 5 находится в поперечной плоскости вертолета, проходящей через основной замок 8 (см. фиг. 4). С таким расположением подвески вертолет заходит на подцепку груза 9, рассогласование по углу в горизонтальной плоскости между грузозахватами 4 и строповочными узлами на грузе устраняют поворотом траверсы 2 на угол α1 (фиг. 1). Поворот траверсы осуществляют включением лебедок 12 во встречных направлениях, в результате чего тягу 11 укорачивают, а тягу 10 - удлиняют. Вся внешняя подвеска поворачивается на необходимый угол на вертлюге 6. Таким образом осуществляют ориентирование грузозахватов 4 относительно груза 9. После подцепки груз поднимают над землей и поворотом траверсы 2 в исходное положение устанавливают его в транспортное положение (фиг. 2).
При зависании вертолета с грузом 9 над местом монтажа, например над фундаментом 19, устраняют рассогласование между осями груза и фундамента поворотом траверсы на угол α2 (фиг. 3). Затем снижением вертолета груз 9 устанавливают на фундамент 19 и производят отцепку грузозахватов 4 от груза. Вернув траверсу 2 в исходное положение, вертолет направляют на посадку.
Перед посадкой устройство приводят в посадочное положение, т.е. складывают следующим образом. Включают обе лебедки 12 "на уборку", чем укорачивают тяги 10 и 11 на одинаковую длину. В результате поворота звенев внешней подвески в шарнирах на наконечнике 7 и на вертлюге 6 подтягивают траверсу 2 к фюзеляжу вертолета, сохраняя ее поперечное положение относительно вертолета. В случае варианта устройства с закреплением замков 15 на концах рычагов 17 при подтягивании траверсы 2 к фюзеляжу, благодаря повороту втулок 16, рычаги 17 устанавливают в направлении действия сил в тягах 10 и 11, т.е. вдоль фюзеляжа.
При аварийном сбросе груза 9 в полете открывают замки 8 и 15, и вся внешняя подвеска отцепляется от вертолета 1. На вертолете остается система азимутальной ориентации: штатное грузоподъемное оборудование со своими тросами - гибкими тягами 10 и 11, свободные концы которых удерживаются около фюзеляжа дополнительными гибкими связями - страховочными тросиками 18.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2372252C2 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2308400C2 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2307049C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2196709C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ВЕРТОЛЕТАМИ | 2006 |
|
RU2340513C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ И МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2350511C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2176011C2 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА | 1992 |
|
RU2028968C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ГРУЗА ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2174090C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1991 |
|
RU2015073C1 |




Способ используется при проведении строительно-монтажных работ. Закрепляют груз посредством подвески снизу летательного аппарата. Ориентация груза в горизонтальной плоскости производится с помощью гибких тяг, подсоединенных одним концом к траверсе, а другим к приводу, в качестве которого используют штатное грузоподъемное оборудование, имеющееся на летательном аппарате (лебедку или тельфер). Лебедочные тросы пропускаются через блоки, закрепленные на максимальном удалении от замка подвески. За счет использования штатной лебедки в качестве привода уменьшаются затраты на производство монтажных работ, появляется возможность использования для монтажа неспециализированных транспортных летательных аппаратов, снижается вес устройства и увеличиваются стабилизирующее и управляющее воздействия. 2 с. и 3 з.п.ф-лы, 6 ил.
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА | 1992 |
|
RU2028968C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030332C1 |
| СПОСОБ МОНТАЖА ГРУЗА С ПОМОЩЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2023650C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ВРАЩЕНИЯ ГРУЗА | 1992 |
|
RU2009102C1 |
| US 4378919, 05.04.83. | |||
