Изобретение относятся к области автоматического управления колебательными объектами с нестабильными резонансными частотами.
Известна нелинейная нестационарная система, содержащая последовательно соединенные блок сравнения, усилитель, двухканальное псевдолинейное корректирующее устройство и объект управления, описываемый передаточной функцией апериодического звена с нестационарными параметрами, причем псевдолинейное корректирующее устройство (ПЛКУ) состоит из последовательно соединенных инерционного фильтра, блока модуля и блока умножения, второй вход которого связан с выходом релейного элемента, соединенного входом с выходом дифференцирующего звена, вход которого связан с входом инерционного фильтра (Нелинейные нестационарные системы // Вышковский Г.Л., Ганопольский Л.З., Долгов А.М. и др. Под ред. Топчеева Ю.И. - М.: Машиностроение, 1986, с. 30, рис. 1.10).
Недостатками такой системы является, во-первых, то, что для настройки коррекции необходимо знать характер изменения частотных характеристик (ЧХ) объекта в процессе его работы (чаще всего эта информация априори неизвестна) и, во-вторых, ограниченный линейными фильтрами частотный диапазон фазового опережения псевдолинейного корректирующего устройства (в этом случае при изменении инерционности объекта, а следовательно, и его частотных свойств, возможно уменьшение запаса устойчивости системы по фазе, приводящее к ухудшению качества работы системы).
Известен способ фазового управления антирезонансной коррекцией, основанный на включении алгоритма стабилизации по сигналу, несущему информацию о фазе упругих колебаний (Рутковский В.Ю., Суханов В.М. Большие космические конструкции: модели, методы исследования и принципы управления. // АиТ, 1996, N 8, с. 55-66).
Недостатком такого способа является отключение на время стабилизации базового алгоритма управления и необходимость организации безударного переключения с основного алгоритма управления на алгоритм стабилизации, что связано с дополнительными затратами.
Известна также следящая система, содержащая последовательно соединенные первый блок сравнения, первый инерционный фильтр, блок модуля, усилитель, блок умножения, двигатель, тахогенератор, второй инерционный фильтр, дифференцирующее звено, второй блок сравнения и релейный элемент, причем выход двигателя через редуктор соединен со вторым входом первого блока сравнения, выход релейного элемента подключен ко второму входу блока умножения, а второй вход второго блока сравнения связан с выходом первого инерционного фильтра (Михалев А.С., Миловзоров В.П. Следящие системы с бесконтактными двигателями постоянного тока. - М.: Энергия, 1979, с.50, рис. 2.13).
Недостатком такой системы является возможность ухудшения показателей качества системы при значительных изменениях момента инерции на валу двигателя. Данный недостаток объясняется тем, что коррекция в системе настраивается и работает на ограниченный постоянный частотный диапазон, определяемый на основе известной и принятой неизменной электромеханической постоянной времени двигателя. Однако для ряда промышленных электроприводов характерно изменение электромеханической постоянной времени двигателя в 5-10 раз.
Известен способ нелинейной коррекции фазового запаздывания, выбранный в качестве прототипа, основанный на получении корректирующего сигнала путем вычитания из входного сигнала управления выходного сигнала звена "люфт", на вход которого поступает входной сигнал управления, а ширина его зоны нечувствительности управляется амплитудой входного сигнала. Корректирующий сигнал с выхода блока сравнения характеризуется фазовым опережением и амплитудным ослаблением, не зависящими от частоты и амплитуды сигнала управления (авт. св. СССР N 310226, МПК G 05 В 5/01).
Недостатком данного способа является частотная независимость создаваемого амплитудного ослабления и фазового опережения, что не позволяет корректировать резонансную ЧХ только в нужном диапазоне резонансных частот.
Известна самонастраивающаяся следящая система (ССС), выбранная в качестве прототипа, содержащая последовательно соединенные первый блок сравнения, первый инерционный фильтр, блок выделения модуля, первый усилитель, блок умножения, двигатель, тахогенератор, второй инерционный фильтр, блок измерения амплитуды, блок типа "люфт", дифференцирующее звено, второй блок сравнения, релейный элемент, причем второй вход второго блока сравнения связан с выходом второго усилителя, соединенного входом со входом блока модуля и входом третьего инерционного фильтра, выход которого связан со вторым входом блока типа "люфт", а выход двигателя через редуктор подключен ко второму входу первого блока сравнения (авт.св. СССР N 1644089, МКИ 5 C 05 В 13/02).
Недостатком прототипа является возможность ухудшения показателей качества системы при значительных изменениях момента инерции на валу двигателя, когда его характеристики приобретают резонансные свойства. Данный недостаток объясняется тем, что в системе реализован принцип амплитудного управления коррекцией и на частоте, близкой к частоте резонанса, возрастание амплитуды сигнала на выходе двигателя будет приводить к увеличению ширины зоны нечувствительности "люфта" и, как следствие, к уменьшению фазового опережения корректирующего устройства и снижению вносимого им ослабления.
Основной задачей, на решение которой направлены заявляемые способ адаптивной антирезонансной коррекции нестабильных частотных характеристик объекта управления и самонастраивающаяся следящая система, является компенсация фазового запаздывания с одновременным демпфированием резонансного пика амплитудной частотной характеристики (АЧХ) объекта управления (двигателя).
Указанная задача достигается за счет того, что в способе адаптивной антирезонансной коррекции нестабильных частотных характеристик колебательного объекта управления, формируют корректирующий сигнал путем вычитания из входного сигнала управления фазоотстающего сигнала с выхода нелинейного звена с характеристикой типа "люфт". Согласно изобретению управление шириной зоны нечувствительности и наклоном характеристики "люфт" осуществляют двумя сигналами, формируемыми по различным законам из сигнала, пропорционального создаваемому объектом управления фазовому сдвигу. Этот сигнал получают при сравнивании фаз сигналов на входе и выходе объекта управления.
Поставленная задача достигается за счет того, что самонастраивающаяся следящая система для осуществления способа адаптивной антирезонансной коррекции, содержит блок типа "люфт", первый блок умножения, блок определения амплитуды, первый блок сравнения, последовательно соединенные усилитель, двигатель, редуктор, второй блок сравнения и первый инерционный фильтр, а также последовательно соединенные тахогенератор и второй инерционный фильтр, причем вход тахогенератора связан с выходом двигателя. Согласно изобретению в систему дополнительно введены второй блок умножения, два формирователя и блок определения фазового сдвига, первый вход которого соединен с выходом усилителя, второй вход подключен к выходу второго инерционного фильтра, а выход соединен со входами формирователя сигнала управления шириной зоны нечувствительности "люфта" и формирователя сигнала управления наклоном "люфта", выходы которых подключены соответственно к первым входам первого и второго блоков умножения, причем второй вход первого блока умножения через блок определения амплитуды связан с выходом первого инерционного фильтра, первым входом первого блока сравнения и первым входом блока типа "люфт", второй вход которого соединен с выходом первого блока умножения, а выход подключен ко второму входу второго блока умножения, выход которого соединен со вторым входом первого блока сравнения, связанного выходом со входом усилителя.
Работа ССС основана на получении на выходе первого блока сравнения сигнала с АЧХ, инверсной к амплитудному пику АЧХ резонансного двигателя, и с фазовой частотной характеристикой (ФЧХ), компенсирующей фазовое запаздывание. В ССС второй блок сравнения, усилитель, формирователь сигнала управления шириной зоны нечувствительности "люфта" и формирователь сигнала управления наклоном "люфта", первый и второй блоки умножения, блок определения амплитуды и блок типа "люфт" функционально образуют ПЛКУ.
Получение информации о возникновении резонансных явлений в системе для ПЛКУ основано на жесткой связи между фазовой и амплитудной частотными характеристиками двигателя, имеющего передаточную функцию колебательного звена. Как известно, на частоте резонанса в таком звене происходит увеличение фазового запаздывания. Таким образом, информация о возникновении резонансов поступает в ПЛКУ в виде сигнала с определенным уровнем напряжения, пропорциональным рассогласованию фаз на входе и выходе двигателя. Для этого используется блок определения фазового сдвига, обрабатывающий сигналы со входа и через тахогенератор и второй инерционный фильтр с выхода двигателя.
В настоящей заявке на выдачу патента соблюдено требование единства изобретения, поскольку способ адаптивной антирезонансной коррекции нестабильных частотных характеристик колебательного объекта управления и самонастраивающаяся следящая система для его осуществления предназначены для управления колебательными объектами с нестабильными резонансными частотами. Заявляемые решения решают одну и ту же задачу компенсации фазового запаздывания с одновременным демпфированием резонансного пика АЧХ объекта управления за счет достижения одного и того же технического результата.
На фиг. 1 представлены характеристики звена типа "люфт" при изменении коэффициента ширины зоны нечувствительности "люфта" Кa и коэффициента наклона характеристики "люфт" Кn. Причем на фиг. 1a представлены зависимости амплитудного ослабления, а на фиг. 1б зависимости фазового опережения корректирующего сигнала при различных значениях коэффициента наклона характеристики "люфт":
1) Кn = 0,5;
2) Kn = 1;
3) Kn = 1,5;
4) Kn = 2.
На фиг. 2 изображена зависимость коэффициента наклона характеристики "люфт" Кn от значения фазового сдвига.
На фиг. 3 изображена зависимость коэффициента ширины зоны нечувствительности "люфта" Кa от значения фазового сдвига.
Блок-схема самонастраивающейся следящей системы представлена на фиг. 4.
На фиг. 5 приведена схема реализации формирователя сигнала управления шириной зоны нечувствительности "люфта".
На фиг. 6 приведена схема реализации формирователя сигнала управления наклоном "люфта".
На фиг. 7 приведена схема реализации формирователя сигнала управления шириной зоны нечувствительности "люфта" и формирователя сигнала управления наклоном "люфта".
На фиг. 8 показаны логарифмические частотные характеристики (ЛЧХ) ССС: на фиг 5a логарифмическая амплитудная частотная характеристика (ЛАЧХ), а на фиг. 5б логарифмическая фазовая частотная характеристика (ЛФЧХ). Где
1 - логарифмические амплитудная и фазовая характеристики исходной системы,
2 - логарифмические амплитудная и фазовая характеристики ПЛКУ,
3 - логарифмические амплитудная и фазовая характеристики разомкнутой ССС с ПЛКУ.
На основании метода гармонической линеаризации найдем основные выражения, поясняющие принцип самонастройки ПЛКУ в заявляемой следящей системе.
Известно, что коэффициенты гармонической линеаризации блока типа "люфт" определяются следующим образом (авт.св. СССР N 3102261):
где ψ(Ka) = arcsin(1-2 • Ka).
Используя коэффициенты гармонической линеаризации звена типа "люфт", запишем передаточную функцию ПЛКУ
На основании (2) можно построить зависимости амплитудной и фазовой характеристик рассматриваемого ПЛКУ при изменении коэффициентов Кa и Кn [фиг. 1].
Исходя из приведенных характеристик [фиг. 1] были выбраны законы изменения Кa и Кn от сигнала фазового сдвига, реализуемые формирователями.
Из графиков [фиг. 1a] видно, что максимальное ослабление по амплитуде наблюдается при коэффициенте наклона люфта Кn =1, а при увеличении или при уменьшении Кn ослабление значительно меньше. При значении Kn, близком к 1, амплитудное ослабление сигнала тем больше, чем меньше Кa. Таким образом, на частоте резонанса ширина "люфта" должна стремиться к нулю [Кa---> 0], а Kn ---> 1.
Анализируя фазовую характеристику [фиг. 1б], делаем вывод, что подъем фазы на + π осуществляется при значении Kn > 1, причем Кa ---> 0.
На основе вышеизложенного были получены законы, по которым должны изменяться ширина зоны нечувствительности и наклон "люфта" в зависимости от отрицательного фазового сдвига на выходе резонансного объекта управления.
Закон изменения ширины зоны нечувствительности "люфта" имеет следующий вид:
Как видно из графика [фиг. 2], при нулевом фазовом сдвиге Ka=1, следовательно, в системе не формируется корректирующий сигнал. При φ = π/2, то есть на частоте резонанса, Кa должен как можно ближе подходить к 0, что позволяет демпфировать резонансный пик АЧХ двигателя. При фазовом сдвиге, равном π, будем иметь Кa=0 и фазовое опережение составит +π.
Закон изменения наклона "люфта" имеет следующий вид:
На фиг. 3 представлена зависимость коэффициента наклона люфта от изменения фазового сдвига. При нулевом фазовом сдвиге коэффициент Кn = 1. По мере возрастания отрицательного фазового сдвига значение Kn растет от 1 до 2. При рассогласовании фаз φ = -π/2 значение Kn должно быть близко к 1, чтобы не искажать сигнал амплитудного ослабления, а при φ = -π, Kn=2, чтобы поднять фазу на +π.
Таким образом, с помощью выбранных законов изменения коэффициентов ширины зоны нечувствительности и наклона характеристики "люфт" можно реализовать самонастройку антирезонансной коррекции в нужном диапазоне резонансных частот и решить тем самым поставленную выше задачу.
ССС, реализующая вышеизложенные принципы самонастройки, содержит (фиг. 4) последовательно соединенные второй блок сравнения 1, первый инерционный фильтр 2, первый блок сравнения 3, усилитель 4, двигатель 5, тахогенератор 6, второй инерционный фильтр 7, блок определения фазового сдвига 8, формирователь сигнала управления шириной зоны нечувствительности "люфта" 9, первый блок умножения 10, блок типа "люфт" 11, второй блок умножения 12, выход которого связан со вторым входом первого блока сравнения 3, причем второй вход второго блока умножения 12 связан с выходом формирователя сигнала управления наклоном "люфта" 13, вход которого соединен с выходом блока определения фазового сдвига 8, второй вход которого соединен с выходом усилителя 4. Второй вход первого блока умножения 10 связан с выходом блока определения амплитуды 14, вход которого связан с входом блока типа "люфт" 11 и выходом первого инерционного фильтра 2, а выход двигателя 5 через редуктор 15 подключен ко второму входу второго блока сравнения 1.
В нерезонансном режиме работы ССС фазовое рассогласование на входе и выходе двигателя 5 равно нулю, сигнал на выходе блока определения фазового сдвига 8 также равен нулю, ПЛКУ не преобразует сигнал управления, который поступает на вход двигателя 5. При возникновении в системе резонансных явлений на выходе объекта управления (двигателя) образуется фазовый сдвиг, равный на частоте резонанса π/2. На выходе блока 8 появляется сигнал, пропорциональный этому фазовому сдвигу, который подается на входы формирователя сигнала управления шириной зоны нечувствительности "люфта" 9 и формирователя сигнала управления наклоном "люфта" 13.
Формирователь сигнала управления шириной зоны нечувствительности "люфта" 9 формирует закон изменения коэффициента ширины зоны нечувствительности "люфта" (3). Сигнал с формирователя сигнала управления шириной зоны нечувствительности "люфта" 9 после перемножения в первом блоке умножения 10 с амплитудным значением управляющего сигнала, который поступает с блока определения амплитуды 14, подается на управляющий вход блока типа "люфт" 11. На второй вход блока типа "люфт" 11 подается сигнал управления. При коэффициенте ширины зоны нечувствительности, равном единице (Ka=1), на выходе блока типа "люфт" 11 сигнала нет, а при значении Кa=0 блок типа "люфт" 11 пропускает весь управляющий сигнал.
Формирователь сигнала управления наклоном "люфта" 13 служит для формирования закона изменения коэффициента наклона (Кn) характеристики типа "люфт" (4). Сигнал с формирователя сигнала управления: наклоном характеристики люфта 13 перемножается во втором блоке умножения 12 с выходным сигналом блока типа "люфт" 11. При нулевом фазовом сдвиге Kn=1, то о есть угол наклона характеристики типа "люфт" равен 45o. При возникновении фазового сдвига Kn > 1 на выходе второго блока умножения 12 формируется фазоотстающий сигнал.
На отрицательный вход первого блока сравнения 3 подается сигнал с выхода второго блока умножения 12, характеризующийся амплитудным пиком на частоте резонанса и фазовым отставанием. Таким образом, при вычитании этого сигнала из сигнала управления двигателем в системе реализуется формирование корректирующего сигнала, имеющего амплитудное ослабление и фазовое опережение.
Техническая реализация некоторых блоков предлагаемой ССС выполнена на основании известных схем (Тетельбаум И.М., Шнейдлер Ю.Р. Практика аналогового моделирования динамических систем: Справочное пособие. - М.: Энергоатомиздат, 1987, 384 с.). Так:
- блоки сравнения 1 и 3 выполнены на операционных усилителях серии. К140 с пассивными суммирующими цепями на их входах;
- инерционные фильтры 2, 7 реализуются на операционных усилителях, в обратных, связях которых стоят параллельно включенные резистор и конденсатор;
- блоки умножения 10 и 12 реализованы на логических схемах серии К133 в сочетании с аналоговыми ключами;
- блок типа "люфт" 11 реализован на последовательно соединенных диодной схеме зоны нечувствительности и операционном усилителе с конденсаторами на входе и в обратной связи.
В основу реализации блоков 9 и 13 может быть положена, например, схема нелинейного преобразователя (НП), осуществляющая функцию синуса по невременному аргументу, которым является напряжение, пропорциональное фазовому сдвигу объекта (Прагер И.Л. Электронные аналоговые вычислительные машины. - М. : Машиностроение, 1985, с. 212, рис. 103). На основе этого НП схема, выполняющая в блоке 9 функцию (3), может быть реализована как показано на фиг. 5, где U0 = Uφ при φ = π.
На основе этого же НП можно реализовать и схему блока 13, выполняющего функцию (4). Для этого упростим в формуле аргумент cos
Kn(Φ) = 2-cos(Φ/2) (5)
и перейдем к функции sin
Схема, реализующая эту зависимость, приведена на фиг. 6.
В схеме на фиг. 6. используется блок аналогового делителя, реализация которого известна (Алексенко А.Г. и др. Применение прецизионных аналоговых микросхем. - М.: Радио и связь, 1985, с. 97, рис. 2.27).
Следует заметить, что при практической реализации системы с целью ее упрощения можно использовать в блоках 9 и 13 только два НП с функцией sin, один из которых с входным сигналом Uφ/2 будет использоваться в обоих блоках, как показано на фиг. 7.
Для реализации блока определения амплитуды 14 могут быть использованы последовательно соединенные узкополосный фильтр, выпрямитель и усредняющее устройство, в качестве которого почти, всегда применяется апериодическое звено (Кобзев А.А. Особенности устройств определения амплитудного значения сигнала. //Известия вузов. Электротехника. N 2-3, 1998, с. 51-55, рис. 1a).
Блок определения фазового сдвига 8 может быть реализован в виде временного квантователя и схемы измерения и запоминания амплитуды (Кобзев А.А. Особенности устройств определения фазового сдвига в самонастраивающихся системах со стабилизацией ФЧХ. // Известия вузов. Электротехника. N 4, 1998, с. 41-45, рис. 1б).
Усилитель 4, двигатель 5, редуктор 15 тахогенератор 6 выбираются непосредственно при проектировании электромеханической системы в зависимости от типа решаемой задачи, нагрузки, внешних факторов и т.д.
Проиллюстрировать принцип работы самонастраивающейся следящей системы можно с помощью логарифмических частотных характеристик, приведенных на фиг. 8. Возникновения в ССС резонансных колебании приводит к возникновению отрицательного фазового сдвига на выходе двигателя. При этом АЧХ ПЛКУ создает амплитудное ослабление на частоте резонанса, а ФЧХ ПЛКУ инверсна ФЧХ исходной колебательной системы, то есть фаза поднимается на π.а






Изобретение относится к области автоматического управления колебательными объектами с нестабильными резонансными частотами. Технический результат заключается в компенсации фазового запаздывания с одновременным демпфированием резонансного пика амплитудной частотной характеристики (АЧХ) объекта управления (двигателя). Способ адаптивной антирезонансной коррекции нестабильных частотных характеристик колебательного объекта заключается в том, что формируют корректирующий сигнал путем вычитания из входного сигнала управления фазоотстающего сигнала с выхода нелинейного звена с характеристикой типа "люфт". Управление шириной зоны нечувствительности и наклоном характеристики "люфт" осуществляют двумя сигналами, формируемыми по различным законам из сигнала, пропорционального создаваемому объектом управления фазовому сдвигу. Этот сигнал получают при сравнивании фаз сигналов на входе и выходе объекта управления. Следящая система содержит блок типа "люфт", два блока умножения, блок определения амплитуды, блок определения фазового сдвига, блок сравнения, усилитель, два формирователя, один из которых по сигналу фазового сдвига задает наклон характеристики "люфт", а второй задает ширину зоны нечувствительности. 2 с.п.ф-лы, 8 ил.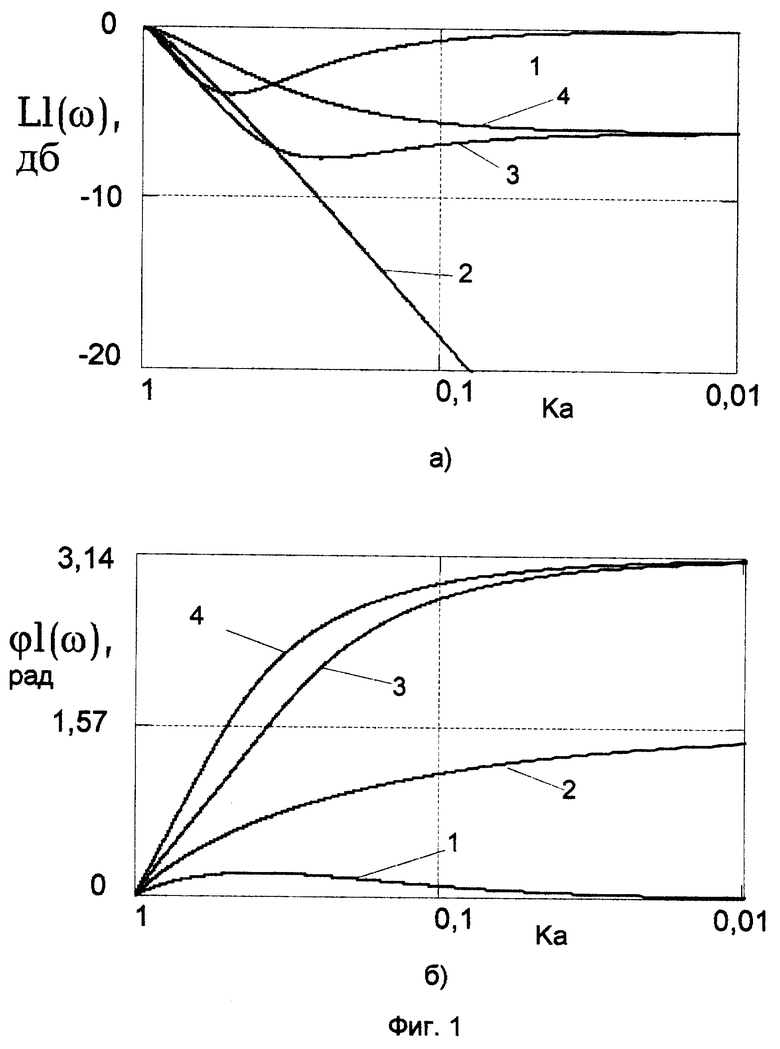
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU310226A1 |
| Самонастраивающаяся следящая система | 1988 |
|
SU1644089A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
| US 5043862 A, 27.08.1991 | |||
| МИХАЛЕВ А.С | |||
| и др | |||
| Следящие системы с бесконтактными двигателями постоянного тока | |||
| - М.: Энергия, 1979, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РУТКОВСКИЙ В.Ю | |||
| и др | |||
| Большие космические конструкции: модели, методы исследования и принципы управления | |||
| В ж | |||
| А и Т | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Нелинейные нестационарные системы/Под ред | |||
| Ю.И | |||
| ТОПЧЕЕВА - М.: Машиностроение, 1986, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
