Фи&1
Изобретение относится j области автоматического регулирования объектами с изменяющейся инерционностью и может быть использовано, например, в электромеханических системах.
Цель изобретения - повышение качества системы с нестационарным моментом инерции на валу двигателя.
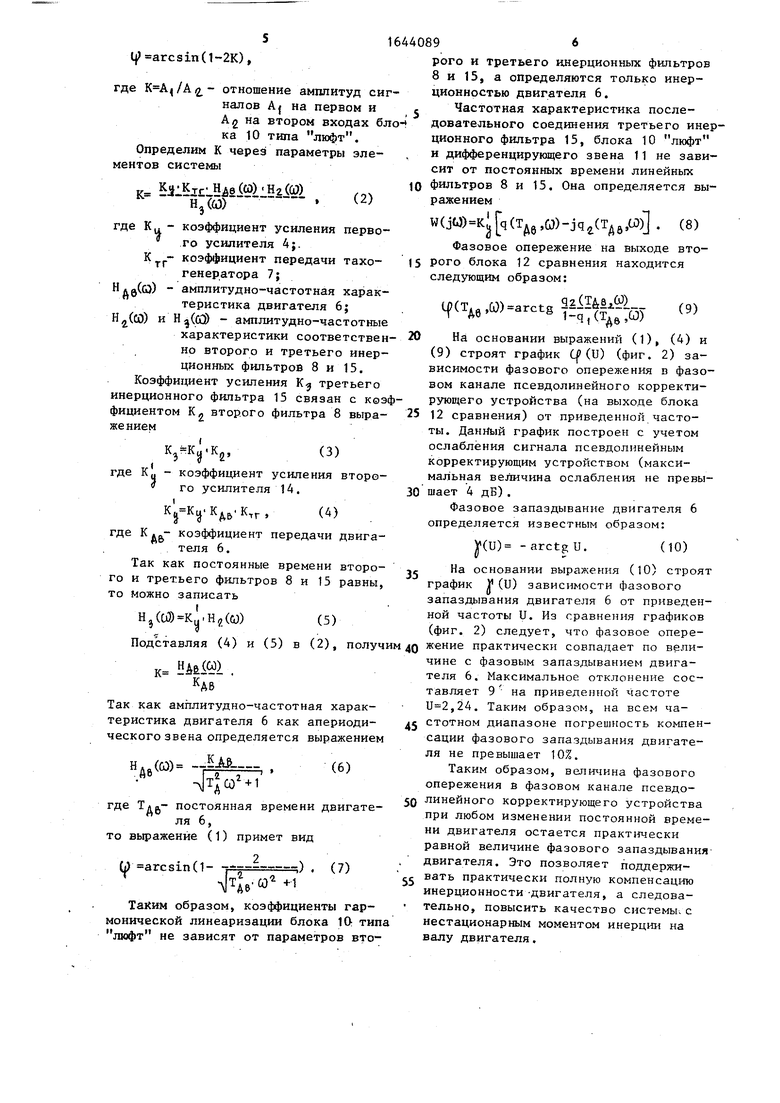
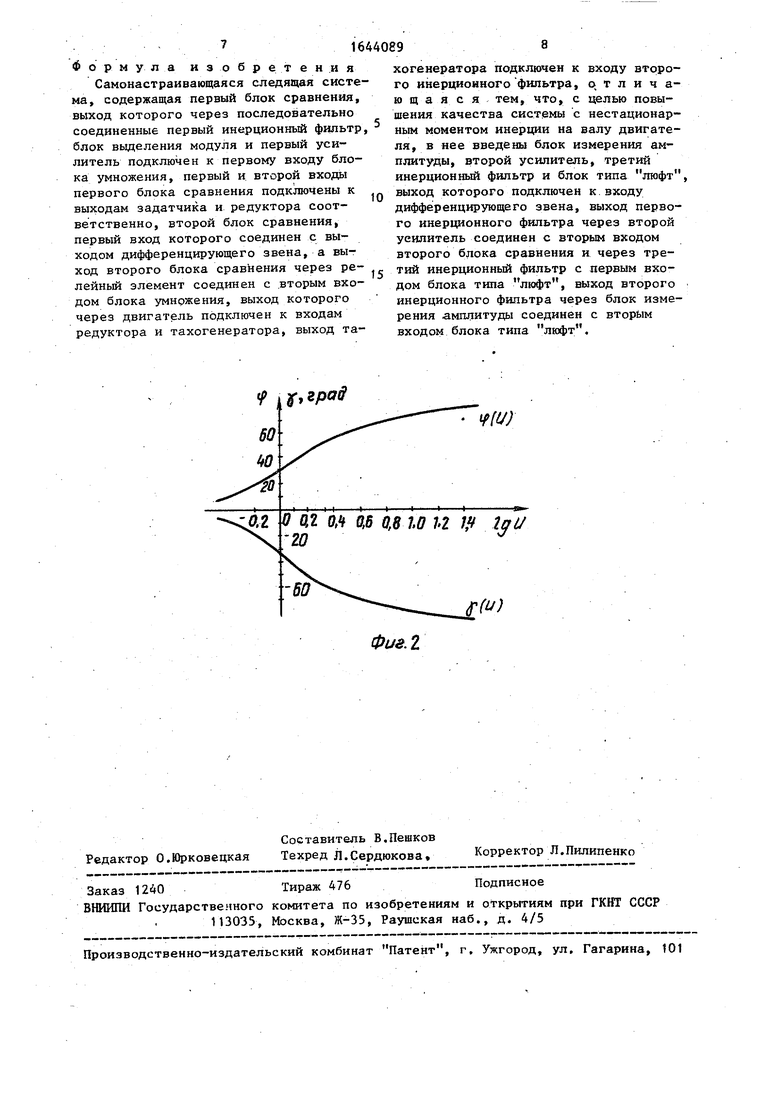
На фиг. 1 представлена структурная схема следящей системы; на фиг. 2 - фазочастотные характеристики контура самонастройки и двигателя
Следящая система (фиг. 1) содержит первый блок 1 сравнения, первый инерционный фильтр 2, блок 3 выделения модуля, первый усилитель 4, блок 5 умножения, двигатель 6, тахогене- ратор 7, второй инерционный фильтр 8, блок 9 измерения амплитуды, блок 10 типа люфт, дифференцирующее звено 11, второй блок 12 сравнения, релейный элемент 13, второй усилитель 14, третий инерционный фильтр 15, редуктор 16 и задатчик 17.
Самонастраивающаяся следящая система работает следующим образом.
Принцип работы системы основан на компенсации нестационарной инерционности двигателя 6 путем создания на выходе блока 5 умножения фазового опережения, практически равного по величине фазовому запаздыванию двигателя. В следящей системе блок 3 выделения модуля, первый усилитель 4, блок 5 умножения, релейный элемент 13, второй блок 12 сравнения, второй усилитель 14, дифференцирующее звено 11, третий инерционный фильтр 15 и блок 10 типа люфт функционально образуют псевдолинейное корректирующее устройство. Фазовое опережение фазовом канале псевдолинейного корректирующего устройства является реНаличие после тахогенератора 7 функционально необходимого инерционного фильтра 8 ослабляет сигнал с выхода тахогенератора 7, искажая тем самым информацию о фазовом запаздывании двигателя 6 в сторону его увеличения. Известно, что чрезмерное увеличение фазового опережения в системе с псевдолинейным корректирующим устройством приводит при отработке ступенчатых воздействий к переходным движениям типа скользящих. В этих режимах движение выходной координаты представляет собой медленное монотонное изменение средней составляющей и наложенные на нее пульсации (высокочастотные колебания). Такие переходные процессы обычно более продолжительны и поэтому нежелательны. С целью недопущения в следящей системе перекомпенсации инерционности двигателя 6, а следовательно, и режима типа скользящего к второму входу блока 10 люфт подключен третий 35 инерционный фильтр 15 с постоянной времени, равной постоянной времени второго инерционного фильтра 8. Третий инерционный фильтр 15, согласуя амплитуды сигналов на входах блока 10 типа, люфт, вносит при этом ча- стотозависимое фазовое отставание. Компенсация этого фазового отставания осуществляется дифференцирующим звеном 11, стоящим после блока 10 тизультатом вычитания из выходного сиг- дг „ . ,,
dyJlbldiUM вшчи а4Г па люфт и ИМ6ЮЩИМ ОбрЗТНЬШ ЧаСТОТнала второго усилителя 1ч фазоот- стающего сигнала, полученного после прохождения выходным сигналом первого инерционного фильтра 2 через поПО Т ПО Т НИ
50
стройки в предлагаемой следящей системе.
Коэффициенты гармонической линеследовательно соединенные третий инерционный фильтр 15, блок 10 типа люфт и дифференцирующее звено 11.
Получение информации о фазовом запаздывании двигателя 6 для самонастройки основано на жесткой связи между фазовой и амплитудной частотными характеристиками двигателя, имеющего передаточную функцию апериодического звена. Как известно,
ные характеристики по сравнению с третьим инерционным фильтром 15.
На основе метода гармонической линеаризации находят основные вырааризации блока 10 типа люфт опре- 55 деляются следующим образом:
q, 5 +Y+ | sin 2(j
1
D
5
0
увеличение фазового запаздывания с ростом частоты в таком звене происходит одновременно с уменьшением коэффициента передачи. Таким образом, информация о фазовом запаздывании двигателя поступает в псевдолинейное корректирующее устройство в виде амплитуды сигнала с выхода тахо- генератора 7, установленного на валу двигателя 6.
Наличие после тахогенератора 7 функционально необходимого инерционного фильтра 8 ослабляет сигнал с выхода тахогенератора 7, искажая тем самым информацию о фазовом запаздывании двигателя 6 в сторону его увеличения. Известно, что чрезмерное увеличение фазового опережения в системе с псевдолинейным корректирующим устройством приводит при отработке ступенчатых воздействий к переходным движениям типа скользящих. В этих режимах движение выходной координаты представляет собой медленное монотонное изменение средней составляющей и наложенные на нее пульсации (высокочастотные колебания). Такие переходные процессы обычно более продолжительны и поэтому нежелательны. С целью недопущения в следящей системе перекомпенсации инерционности двигателя 6, а следовательно, и режима типа скользящего к второму входу блока 10 люфт подключен третий 5 инерционный фильтр 15 с постоянной времени, равной постоянной времени второго инерционного фильтра 8. Третий инерционный фильтр 15, согласуя амплитуды сигналов на входах блока 10 типа, люфт, вносит при этом ча- стотозависимое фазовое отставание. Компенсация этого фазового отставания осуществляется дифференцирующим звеном 11, стоящим после блока 10 ти5
0
0
г „ . ,,
ные характеристики по сравнению с третьим инерционным фильтром 15.
На основе метода гармонической линеаризации находят основные вырааризации блока 10 типа люфт опре- 55 деляются следующим образом:
q, 5 +Y+ | sin 2(j
1
D
Ц)агсз1п(1-2К),
где /А Ј - отношение амплитуд сигналов А( на первом и A g на втором входах бло- ка 10 типа люфт. Определим К через параметры элементов системы
к SiibiJksMiSiM
нэ(оз)
Н
Ь
где Кц - коэффициент усиления перво го усилителя 4; KT(- коэффициент передачи тахогенератора 7;
,(Q) - амплитудно-частотная характеристика двигателя 6; Н(СО) и Н(йЗ) - амплитудно-частотные характеристики соответственно второго и третьего инерционных фильтров 8 и 15. Коэффициент усиления К третьего инерционного фильтра 15 связан с коэффициентом Kg второго фильтра 8 выражением
К Ки-Кя, (3)
,1
К„ - коэффициент усиления второ- го усилителя
14.
ТГ
(4)
где К.&- коэффициент передачи двигателя 6.
Так как постоянные времени второго и третьего фильтров 8 и 15 равны, то Можно записать
Нй(СФ-Ки.Н(б))
(Ю)
35
Подставляя
. (4)
(5)
и
к НА&М .
КАВ
Так как амплитудно-частотная характеристика двигателя 6 как апериодического звена определяется выражением
45
ндв(оз) -7Ј-Ш--
А6
где Тда- постоянная времени двигателя 6, то выражение (1) примет вид
0) arcsin(14
тд%-а
Таким образом, коэффициенты гармонической линеаризации блока 10- типа люфт не зависят от параметров вто|p(U) -arctgU.
На основании выражения (Ю) строят график Ґ (U) зависимости фазового запаздывания двигателя 6 от приведенной частоты U. Из сравнения графиков (фиг. 2) следует, что фазовое опере- (5) в (2), получим до жение практически совпадает по величине с фазовым запаздыванием двигателя 6. Максимальное отклонение составляет 9 на приведенной частоте ,24. Таким образом, на всем частотном диапазоне погрешность компенсации фазового запаздывания двигателя не превышает 10%.
Таким образом, величина фазового опережения в фазовом канале псевдо- 50 линейного корректирующего устройства при любом изменении постоянной времени двигателя остается практически равной величине фазового запаздывания двигателя. Это позволяет поддерживать практически полную компенсацию инерционности двигателя, а следовательно, повысить качество системы с нестационарным моментом инерции на валу двигателя.
(6)
(7)
+ 1
55
-
4Д0896
рого и третьего инерционных фильтров 8 и 15, а определяются только инерционностью двигателя 6.
Частотная характеристика последовательного соединения третьего инерционного фильтра 15, блока 10 люфт и дифференцирующего звена 11 не зависит от постоянных времени линейных Ю фильтров 8 и 15. Она определяется выражением
W(j(0)(TA6,G))-jqe(TAe,W) . (8)
Фазовое опережение на выходе вто- 15 рого блока 12 сравнения находится следующим образом:
Ч(Тм,И).аГсС5а1Мй (9)
На основании выражений (1), (4) и (9) строят график Cf (U) (фиг. 2) зависимости фазового опережения в фазовом канале псевдолинейного корректирующего устройства (на выходе блока 12 сравнения) от приведенной частоты. Данный график построен с учетом ослабления сигнала псевдолинейным корректирующим устройством (максимальная величина ослабления не превы- шает 4 дБ).
Фазовое запаздывание двигателя 6 определяется известным образом:
(Ю)
|p(U) -arctgU.
35
до
45
до
50
55
716
Формула изобретения
Самонастраивающаяся следящая система, содержащая первый блок сравнения, выход которого через последовательно соединенные первый инерционный фильтр блок выделения модуля и первый усилитель подключен к первому входу блока умножения, первый и второй входы первого блока сравнения подключены к выходам задатчика и редуктора соответственно, второй блок сравнения, первый вход которого соединен с выходом дифференцирующего звена, а выход второго блока сравнения через релейный элемент соединен с вторым входом блока умножения, выход которого через двигатель подключен к входам редуктора и тахогенератора, выход та
8
хогенератора подключен к входу второго инерционного фильтра, отличающаяся тем, что, с целью повышения качества системы с нестационарным моментом инерции на валу двигателя, в нее введены блок измерения амплитуды, второй усилитель, третий инерционный фильтр и блок типа люфт, выход которого подключен к входу дифференцирующего звена, выход первого инерционного фильтра через второй усилитель соединен с вторым входом второго блока сравнения и через третий инерционный фильтр с первым входом блока типа люфт, выход второго инерционного фильтра через блок измерения амплитуды соединен с вторым входом блока типа люфт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| Корректирующее устройство | 1975 |
|
SU533907A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| Цифровое псевдолинейное корректирующее устройство | 1984 |
|
SU1190360A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Следящая система | 1975 |
|
SU545969A1 |
Изобретение относится к области автоматического регулирования объектами с изменяющейся инерционностью и может быть использовано в электромеханических:, системах. Изобретение позволяет поддерживать практически полную компенсацию инерционности двигателя, а следовательно, получить постоянные запасы устойчивости и показатели качества системы вне зависимости от изменения момента инерции на валу двигателя. Система содержит блоки сравнения 1, 12, инерционные фильтры 2, 8, 15, блок выделения модуля 3, усилители 4, 14, блок умножения 5, двигатель 6, тахогенератор 7, блок измерения амплитуды 9, блок типа люфт 10, дифференцирующее звено 11, релейный- элемент 13, редуктор 16 и задатчик 17. 2 ил.
#,гра&
о аг о,ч о,б а,в w гг w гаи
20У
-60
М)
Фиё. 2
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU310226A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Михалев А.С., Миловзоров В.П | |||
| Следящие системы с бесконтактными двигателями постоянного тока | |||
| - М.: Энергия, 1979, с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
