Изобретение относится к электротехнике, в частности к колебательным электроприводам переменного тока, питаемым от источников различных частот, и может быть использовано в приводах вибротранспортировки, в системах активной компенсации продольных колебаний валопроводов, для перемещения поршней гидроусилительных систем и в других механизмах испытательной, измерительной или калибровочной техники.
Известен колебательный электропривод с устройством для пуска, содержащий два источника напряжения различных частот, два нуль-органа, два ждущих мультивибратора, фазовращатель, элемент 2И, RS-триггер и два электронных пускателя, соединяющих обмотки двигателя с источниками напряжений, первый источник напряжения через последовательно соединенные нуль-орган и ждущий мультивибратор подключен к первому входу элемента 2И, второй источник напряжения через последовательно соединенные фазовращатель, нуль-орган и ждущий мультивибратор подключен к второму входу элемента 2И, выход которого соединен с R-входом RS-триггера, к выходу которого подключены управляющие входы электронных пускателей. Известное устройство позволяет устранить в колебательном электроприводе уход динамической нейтрали колебаний при пуске за счет подключения обмоток двухфазного двигателя к источникам различной частоты в момент времени, когда нулевому значению одного из фазных напряжений частоты ω1 соответствует максимальное значение другого напряжения частоты ω2 .
Однако данное устройство в составе колебательного электропривода не позволяет полностью компенсировать уход динамической нейтрали и тем более уход ее в процессе работы, когда согласно технологическому процессу требуется регулирование частоты колебаний привода. Кроме того, известное устройство требует двух мощных высокостабильных источников различной частоты, что является достаточно сложной задачей в плане технической реализации привода.
Известно устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения, содержащее источник переменного тока и преобразователь частоты, включающий инвертор, а также для расширения эксплуатационных возможностей путем повышения стабильности частоты колебаний и расширения области рабочих частот дополнительно введенные в преобразователь частоты фазовый детектор, первый и второй делители частоты и преобразователь напряжение- частота, соединенный выходом с входами делителей частоты, входом с выходом фазового детектора, входы которого соединены с источником переменного тока и выходом первого делителя частоты, а выходом второго делителя частоты, соединенного с управляющим входом инвертора.
Однако несмотря на исключение из структуры привода второго высокостабильного задающего генератора данное устройство не позволяет вообще компенсировать уход динамической нейтрали колебаний как при пуске, так и непосредственно в процессе работы.
Целью изобретения является повышение точности в работе колебательного электропривода путем устранения ухода геометрической нейтрали колебаний при пуске или регулировании частоты колебаний.
Поставленная цель достигается введением в преобразователь частоты функционального цифроаналогового преобразователя, реализующего функцию вида
Uпр=  , усилителя с регулируемым коэффициентом усиления, преобразователя разности частот в код, первый и второй входы которого соединены соответственно с первым и вторым входами преобразователя частоты, выходы которого соединены соответственно с оставшимися входами преобразователя разности частоты в код и первым и вторым входами усилителя с регулируемым коэффициентом усиления, выход которого соединен с входом инвертора, третий вход усилителя с регулируемым коэффициентом усиления соединен с выходом функционального цифроаналогового преобразователя, вход которого соединен с выходом преобразователя разности частот в код,
, усилителя с регулируемым коэффициентом усиления, преобразователя разности частот в код, первый и второй входы которого соединены соответственно с первым и вторым входами преобразователя частоты, выходы которого соединены соответственно с оставшимися входами преобразователя разности частоты в код и первым и вторым входами усилителя с регулируемым коэффициентом усиления, выход которого соединен с входом инвертора, третий вход усилителя с регулируемым коэффициентом усиления соединен с выходом функционального цифроаналогового преобразователя, вход которого соединен с выходом преобразователя разности частот в код,
где N(fкол) - n-разрядный параллельный двоичный код частоты колебаний;
k1 - коэффициент передачи функционального цифроаналогового преобразователя.
Так как установившееся значение динамического смешения нейтрали колебаний при нулевых начальных условиях определяется как
θдин= - sinγ+Ωcos
sinγ+Ωcos
где θm , γ - амплитуда и фаза установившихся колебаний привода;
Ω = 2 π fкол - круговая частота колебаний;
Тдн. - обобщенная электромеханическая постоянная времени электродвигателя и нагрузки;
fo , ε - коэффициенты электромагнитного демпфирования двигателя и нагрузки, то для полной компенсации ее необходимо, чтобы выполнялось условие sinγ+Ωcos
sinγ+Ωcos =0. (1)
=0. (1)
Здесь фаза установившихся колебаний подвижного элемента привода γ при отсутствии позиционной нагрузки определена как
γ=arctg  , (2)
, (2)
где N1, N2 - составляющие пускового момента исполнительного двигателя, определяемые параметрами электрической машины и функциями регулирования.
Совместное решение (1) и (2) при пренебрежении составляющей жидкостного трения ε определяет функциональную зависимость изменения круговой частоты колебаний Ω от напряжения на обмотке управления двигателя Uу, при которой достигается полная компенсация динамического смещения нейтрали колебаний
Ω =Uу2А,
где А - постоянный коэффициент, определяемый выражением
А= =  N
N -N2/N
-N2/N ,
,
где Сд - постоянный коэффициент электромагнитного демпфирования.
Следовательно, алгоритм изменения напряжения на обмотке управления двигателя, при котором происходит полная компенсация ухода динамической нейтрали колебаний, можно представить как
Uу=  ,
,
где k=  А.
А.
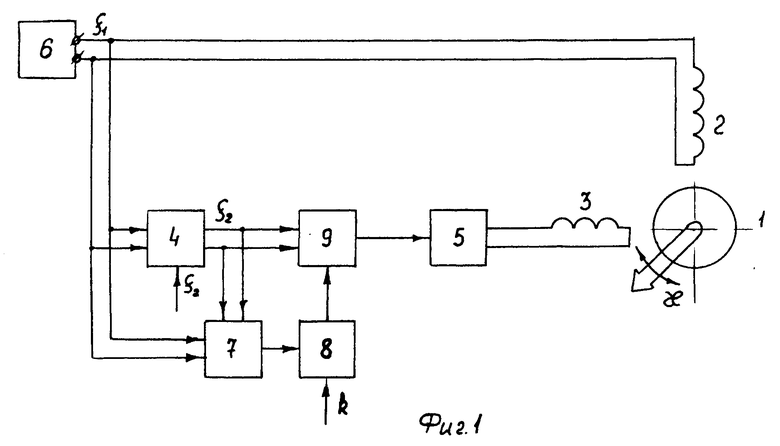
На фиг.1 представлена блок-схема предлагаемого устройства, реализующая данный алгоритм. Она содержит асинхронный двигатель 1 с обмоткой возбуждения 2 и обмоткой управления 3, преобразователь частоты 4, инвертор 5 и источник напряжения 6.
В устройство введены преобразователь разности частот в код 7, функциональный цифроаналоговый преобразователь 8 и усилитель 9 с регулируемым коэффициентом усиления.
Преобразователь 7 разности частот в код подключен своими входами к выходам источника переменного напряжения 6 и преобразователя частоты 4, а выходом - к входу функционального цифроаналогового преобразователя 8, управляющего усилителем 9 с регулируемым коэффициентом усиления, входы которого связаны с выходами преобразователя частот 4, а выход - с управляющим входом инвертора 5.
Устройство работает следующим образом.
Обмотка возбуждения 2 исполнительного двигателя 1 подключена непосредственно к выходу источника переменного напряжения 6 частоты f1, а обмотка управления 3 через инвертор 5 запитывается от преобразователя частоты напряжением частоты f2. Преобразователь разности частот в код 7 определяет разностную частоту колебаний fкод=f1-f2 исполнительного двигателя с последующим преобразованием ее в n-разрядный параллельный двоичный код N(fкол). Этот код поступает на функциональный преобразователь 8, где преобразуется в напряжение постоянного тока с функциональной зависимостью Uпр=  . Сформированное таким образом напряжение на выходе функционального цифроаналогового преобразователя 8 в функции от частоты колебаний вала исполнительного двигателя fкол, производит регулирование коэффициента передачи усилителя 9, коэффициент передачи которого равен коэффициенту передачи преобразователя 8, а следовательно, выходного напряжения на выходе инвертора 5 по закону Uу=
. Сформированное таким образом напряжение на выходе функционального цифроаналогового преобразователя 8 в функции от частоты колебаний вала исполнительного двигателя fкол, производит регулирование коэффициента передачи усилителя 9, коэффициент передачи которого равен коэффициенту передачи преобразователя 8, а следовательно, выходного напряжения на выходе инвертора 5 по закону Uу=  .
.
Здесь k - включает в себя коэффициент передачи функционального цифроаналогового преобразователя k1 и инвертора k2.
Благодаря заданному алгоритму управления и подбором коэффициента k осуществляется полная компенсация ухода динамической нейтрали во всем частотном диапазоне работы колебательного электропривода.
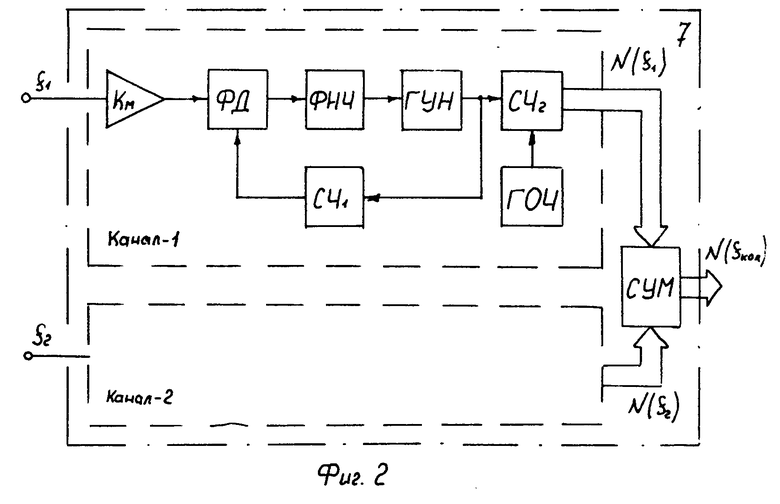
При реализации преобразователь разности частот в параллельный двоичный код был выполнен по схеме измерения частот с помощью счетчиков с увеличением разрешающей способности и сравнением полученных кодов частот f1 и f2 на многоразрядном сумматоре, работающем в режиме вычитания. Блок-схема преобразователя 7 представлена на фиг.2 и включает:
компаратор КМ (операционный усилитель 140УД8);
фазовый детектор ФД и генератор, управляемый напряжением ГУН (микросхема К564ГГ1);
счетчики СЧ1, СЧ2 с коэффициентами счета соответственно 10 и 1024 (микросхемы 155ИЕ2);
генератор опорной частоты ГОЧ (на базе кварцевого резонатора и 155ЛАЗ);
сумматор СУМ (микросхемы 155ИМЗ);
фильтр низкой частоты ФНЧ (активно-емкостной).
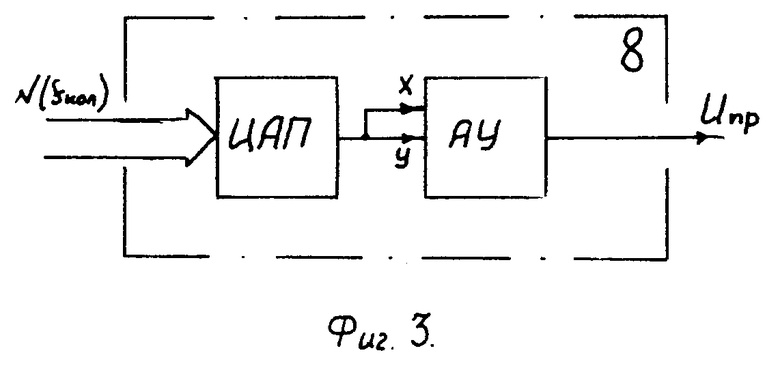
Оба канала преобразования частоты в код (канал 1 и канал 2) идентичны. Разрядность параллельного кода составляет n=10. Функциональный цифроаналоговый преобразователь состоит из перемножающего ЦАП серии 572ПА1 и устройства аналогового умножения АУ, выполненного на микросхеме 525ПС2 (фиг. 3). Усилитель с управляемым коэффициентом усиления выполнен на операционном усилителе 140УД8 с полевым транзистором КП103Л по входной цепи, включенным в качестве управляемого сопротивления.
Таким образом, введением в состав колебательного электропривода преобразователя разности частот в код функционального цифроаналогового преобразователя, реализующего функцию Uпр=  , и усилителя с регулируемым коэффициентом усиления достигнута полная компенсация ухода геометрической нейтрали колебаний в заданном частотном диапазоне, что позволило существенно повысить точность колебательной системы в целом как при пуске, так и в процессе технологических операций и тем самым расширить область применения безредукторных колебательных электроприводов. Формирование заданного алгоритма управления позволило дополнительно стабилизировать амплитуду колебаний при регулировании частоты. Кроме того, предлагаемый привод выполнен по схеме с одним задающим генератором, что в целом повысило удельную мощность колебательного электропривода и снизило его стоимость по сравнению с аналогами.
, и усилителя с регулируемым коэффициентом усиления достигнута полная компенсация ухода геометрической нейтрали колебаний в заданном частотном диапазоне, что позволило существенно повысить точность колебательной системы в целом как при пуске, так и в процессе технологических операций и тем самым расширить область применения безредукторных колебательных электроприводов. Формирование заданного алгоритма управления позволило дополнительно стабилизировать амплитуду колебаний при регулировании частоты. Кроме того, предлагаемый привод выполнен по схеме с одним задающим генератором, что в целом повысило удельную мощность колебательного электропривода и снизило его стоимость по сравнению с аналогами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2636806C2 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2629946C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2017 |
|
RU2677682C1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2016 |
|
RU2640352C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2015 |
|
RU2592080C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2015 |
|
RU2587545C1 |
| Электропривод колебательного движения | 1990 |
|
SU1741249A2 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
Использование: в колебательных электроприводах переменного тока. Сущность изобретения: устройство содержит двухфазный электродвигатель колебательного движения, преобразователь частоты, инвертор, преобразователь разности частот в код, функциональный цифроаналоговый преобразователь, реализующий функцию следующего вида  , где N(fкол) - разрядный параллельный двоичный код частоты колебаний вала двигателя, k1 - коэффициент передачи функционального преобразователя. За счет чего и повышается точность. 3 ил.
, где N(fкол) - разрядный параллельный двоичный код частоты колебаний вала двигателя, k1 - коэффициент передачи функционального преобразователя. За счет чего и повышается точность. 3 ил.
ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ, содержащий двухфазный электродвигатель, обмотка возбуждения которого имеет зажимы для подключения к источнику переменного тока, преобразователь частоты, входы которого предназначены для подключения к фазам источника переменного тока соответственно, инвертор, выход которого соединен с выводами обмотки управления электродвигателя, отличающийся тем, что, с целью повышения точности, введены функциональный цифроаналоговый преобразователь, реализующий функцию следующего вида:
где N (fкол) - разрядный параллельный двоичный код частоты колебаний вала двигателя;
k1 - коэффициент передачи функционального преобразователя,
усилитель с регулируемым коэффициентом усиления, преобразователь разности частот в код, первый и второй входы которого соединены соответственно с первым и вторым входами преобразователя частоты, выходы которого соединены соответственно с оставшимися входами преобразователя разности частот в код и первым и вторым входом усилителя с регулируемым коэффициентом усиления, выход которого соединен с входом инвертора, третий вход усилителя с регулируемым коэффициентом усиления соединен с выходом функционального преобразователя, вход которого соединен с выходом преобразователя разности частот в код.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения | 1987 |
|
SU1453577A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
