Изобретения относятся к области ракетно-космической техники, а именно к устройству двигательных установок ракетных аппаратов.
Известна двигательная установка (см. Передвижная лаборатория на Луне Луноход-1. - М.: Наука, 1971 г., с. 9 и 10) которая содержит корпус и ракетный двигатель, закрепленный на корпусе в подвесе двигателя. Корпус двигательной установки выполнен в виде топливных баков. Ракетный двигатель установлен по оси аппарата. Подвес, включающий крестовину, прочно связанную с корпусом, обеспечивает неподвижное положение двигателя в процессе его работы. Стабилизация двигательной установки в пространстве в процессе работы двигателя осуществляется с помощью газовых управляющих сопел, вынесенных на значительное расстояние от оси двигательной установки. Небольшой удельный импульс этих сопел определяет неэффективный расход топлива двигательной установки.
Известен подвес двигателя (см. Передвижная лаборатория па Луне Луноход-1. - М. : Наука, 1971 г., с. 9 и 10), содержащий неподвижную платформу (крестовину), закрепленную па корпусе двигательной установки и неподвижно соединенную с двигателем. Этот подвес не обеспечивает изменение направления тяги двигателя в процессе его работы.
Известна также двигательная установка по заявке Великобритании N 2214143 от 31.08.89, особенностью которой является использование подвеса двигателя, содержащего два шарнирных элемента. Один конец первого из них закреплен по оси шарнира с возможностью поворота за корпус установки. За другой конец этого шарнирного элемента закреплен шарнирный конец второго элемента по оси его шарнира с возможностью поворота. Двигатель жестко закреплен на другом конце второго шарнирного элемента.
В частном случае, когда оси вращения шарниров обоих шарнирных элементов параллельны продольной оси двигательной установки, такая конструкция обеспечивает плоскопараллельное перемещение двигателя в плоскости, перпендикулярной продольной оси двигательной установки, и обеспечивает возможность получения вращающего момента вне зависимости от расположения двигательной установкой относительно центра масс летательного аппарата. Однако данная конструкция является несимметричной относительно корпуса. При работе двигателя все создаваемое им тяговое усилие передается через место крепления первого шарнирного элемента к корпусу. Слабым местом является также крепление шарнира второго элемента к первому. Вследствие этого такая конструкция, представленная в указанной заявке лишь схематически, не применима при использовании двигателей с большой тягой.
Как по назначению, т. е. с точки зрения пригодности для использования двигателей большой тяги, так и в конструктивном отношении, к предлагаемой двигательной установке наиболее близка установка, описанная в книге "Конструкция и проектирование космических летательных аппаратов", Н.И. Паничкин и др. - М.: Машиностроение, 1986 г., с. 286-287, рис. 22.1 л, содержащая корпус и ракетный двигатель, установленный по оси двигательной установки и закрепленный на корпусе в подвесе. Крепление двигателя на корпусе выполнено в виде карданова подвеса, который обеспечивает поворот двигателя во время его работы относительно двух взаимно перпендикулярных осей, ортогональных продольной оси двигательной установки. Это техническое решение обеспечивает эффективное парирование возмущающих моментов при работе двигателя относительно осей тангажа и рыскания для ракетных аппаратов, у которых центр масс находится на значительном удалении от осей поворота двигателя.
Эта двигательная установка не эффективна при уменьшении указанного расстояния, так как для парирования одного и того же по величине момента необходим поворот двигателя на все больший угол, а при расположении центра масс аппарата в непосредственной близости от осей поворота использование этого технического решения становится невозможным.
Известен подвес ракетного двигателя (заявка Великобритании N 2214143 от 31.08.89), содержащий два шарнирных элемента. Один конец первого из них закреплен по оси шарнира с возможностью поворота за корпус установки. За другой конец этого элемента закреплен шарнирный конец второго элемента по оси его шарнира с возможностью поворота. При использовании этого подвеса двигатель жестко закрепляется на другом конце второго шарнирного элемента.
В частном случае, когда оси вращения шарниров обоих шарнирных элементов параллельны продольной оси двигательной установки, такая конструкция подвеса позволяет осуществить плоскопараллельное перемещение двигателя в плоскости, перпендикулярной продольной оси двигательной установки, и обеспечивает возможность получения вращающего момента вне зависимости от расположения двигательной установкой относительно центра масс летательного аппарата. Однако при работе двигателя все создаваемое им тяговое усилие передается через место крепления первого шарнирного элемента к корпусу. Слабым местом данной конструкции является также крепление шарнира второго к первому. Вследствие этого такая конструкция подвеска не может быть применена для двигателей с большой тягой, и в предлагаемом подвесе реализуется иной принцип обеспечения плоскопараллельного перемещения двигателя.
Наиболее близким к предлагаемому как с точки зрения предназначенности для двигателей большой тяги, так и в конструктивном отношении является подвес двигателя, описанный в книге "Технология сборки и испытаний космических аппаратов". /Под общей ред. И.Т. Белякова и И.А. Чернова, М.: Машиностроение, 1990 г., с. 273-277, рис. 14.6, 14.7. Этот подвес содержит неподвижную платформу, закрепленную на корпусе двигательной установки, подвижную платформу и две рулевые машинки, размещенные во взаимно перпендикулярных плоскостях, основания которых соединены с неподвижной платформой. Неподвижная платформа выполнена в форме стыковочного кольца, которое неподвижно закреплено на корпусе двигательной установки. Подвижная платформа также выполнена в форме кольца. Закрепление оснований каждой рулевой машинки на неподвижной платформе обеспечивает ее связь с корпусом двигательной установки. Наличие подшипниковых узлов, установленных на подвижной платформе, и закрепление исполнительных элементов рулевых машинок на двигателе и подвижной платформе обеспечивает поворот двигателя относительно двух взаимно перпендикулярных осей, ортогональных продольной оси двигательной установки.
Однако это техническое решение не обеспечивает возможность плоскопараллельного перемещения двигателя относительно плоскости, перпендикулярной продольной оси двигательной установки.
Задачей, решаемой предлагаемой конструкцией двигательной установки, является обеспечение эффективного парирования возмущений при работе двигателя в случае расположения центра масс аппарата на небольшом расстоянии от двигателя.
Задачей, решаемой предлагаемым подвесом ракетного двигателя, является обеспечение возможности плоскопараллельного перемещения двигателя относительно плоскости, перпендикулярной продольной оси двигательной установки.
Эти задачи решаются следующим образом.
Предлагаемая двигательная установка, как и наиболее близкая из известных, содержит корпус, ракетный двигатель, установленный по оси двигательной остановки и закрепленный на корпусе в подвесе. В отличие от известной установки подвес двигателя выполнен с возможностью обеспечения плоскопараллельного перемещения двигателя относительно плоскости, перпендикулярной продольной оси двигательной установки. Для этого он содержит неподвижную платформу и две рулевые машинки, размещенные во взаимно перпендикулярных плоскостях, основания которых соединены с неподвижной платформой. Рулевые машинки размещены в плоскости, перпендикулярной продольной оси двигательной установки, а их исполнительные элементы соединены с ракетным двигателем. Подвес снабжен двумя группами роликов, контактирующих с подвижной платформой. Первая группа роликов закреплена на ракетном двигателе, а вторая - на неподвижной платформе. Ролики первой группы установлены с возможностью перемещения в направлении оси первой рулевой машинки, а ролики второй группы - в направлении оси второй рулевой машинки.
Предлагаемый подвес ракетного двигателя, содержит, как и указанный выше наиболее близкий известный, неподвижную платформу, закрепленную на корпусе двигательной установки, подвижную платформу и две рулевые машинки, размещенные во взаимно перпендикулярных плоскостях, основания которых соединены с неподвижной платформой.
В отличие от известного подвеса, в предлагаемом рулевые машинки размещены в плоскости, перпендикулярной продольной оси двигательной установки, а их исполнительные элементы соединены с ракетным двигателем. При этом подвес снабжен двумя группами роликов, контактирующих с подвижной платформой, причем первая группа роликов закреплена на ракетном двигателе, а вторая на неподвижной платформе. Ролики первой группы выполнены с обеспечением возможности перемещения в направлении оси первой рулевой машинки, а ролики второй группы - в направлении оси второй рулевой машинки.
Кроме того, подвижная платформа может быть выполнена в форме плоской пластины с осевым проемом, расположенной перпендикулярно продольной оси двигательной установки.
Ролики каждой группы могут быть расположены в два яруса, при этом первый ярус роликов размещен сверху подвижной платформы, а второй снизу.
Подвижная платформа может быть снабжена дорожками качения, плоскости которых параллельны осям рулевых машинок и продольной оси, а обе группы роликов при этом могут быть снабжены дополнительными роликами, контактирующими с дорожками качения и закрепленными на двигателе в первой группе и на неподвижной платформе во второй группе, при этом дополнительные ролики первой группы выполнены с обеспечением возможности перемещения в направлении оси первой рулевой машинки, а дополнительные ролики второй группы - в направлении оси второй рулевой машинки.
Предлагаемые двигательная установка и подвес ракетного двигателя обеспечивают эффективное парирование возмущений при работе двигателя в случае расположения центра масс аппарата на небольшом расстоянии от двигателя. Действительно, предельными углами качения двигателя в плоскостях стабилизации тангажа и рыскания являются значения углов плюс-минус 5 градусов (см. Технология сборки и испытаний космических аппаратов. /Под общей ред. И.Т. Белякова и И.А. Зернова. М.: Машиностроение, 1990 г., с. 273). Следовательно, при тяге двигателя 20000 Н при отклонении двигателя на 5 градусов и при расположении центра масс аппарата на расстоянии 0,25...0,3 м от оси поворота двигателя двигатель может парировать возмущающий момент не более 450...500 Н х м. Однако значения возмущающих моментов для аппаратов средней массы порядка 6. ..10 т при работе двигателя составляют порядка 1000...1500 Н х м, что делает невозможным использование технического решения двигательной установки с использованием поворота двигателя. Использование же плоскопараллельного перемещения двигателя относительно плоскости, перпендикулярной продольной оси двигательной установки, дает возможность парировать этот момент путем смещения двигателя от продольной оси аппарата на величину порядка 2...8 см. Такое перемещение двигателя достигается тем, что перемещение исполнительных элементов рулевых машинок, соединенных с ракетным двигателем, происходит в плоскости, перпендикулярной продольной оси двигательной установки, а наличие роликов, часть которых закреплена на двигателе, а другая часть на неподвижной платформе и выполненных с обеспечением возможности перемещения вдоль подвижной платформы, дает возможность перемещать двигатель относительно подвижной платформы в направлении оси, перпендикулярной продольной оси двигательной установки.
Наибольшей компактности компоновки двигательной установки можно достичь при выполнении подвижной платформы в форме плоской пластины с осевым проемом. Ракетный двигатель при этом целесообразно расположить в этом проеме.
Расположение роликов каждой группы в два яруса, первый ярус которых размещен сверху подвижной платформы, а второй снизу, обеспечивает надежную передачу силы тяги двигателя через подвижную платформу на неподвижную платформу.
Дополнительное наличие в каждой группе роликов дополнительных роликов и выполнение подвижной платформы с дорожками качения для них, обеспечивают стабилизацию положения подвижной платформы при работе двигателя и рулевых машинок.
Использование предлагаемого подвеса обеспечивает возможность плоскопараллельного перемещения двигателя на величину 10...15 см для двигательных установок с ракетным двигателем с габаритными размерами порядка 1 м в длину и 0,7 м в диаметре.
Предлагаемое техническое решение подвеса двигателя может быть использовано как в составе предлагаемой двигательной установки, так и самостоятельно в составе иных механизмов космических аппаратов для плоскопараллельного перемещения грузов.
Предлагаемые технические решения поясняются следующими чертежами:
фиг. 1 - двигательная установка в разрезе,
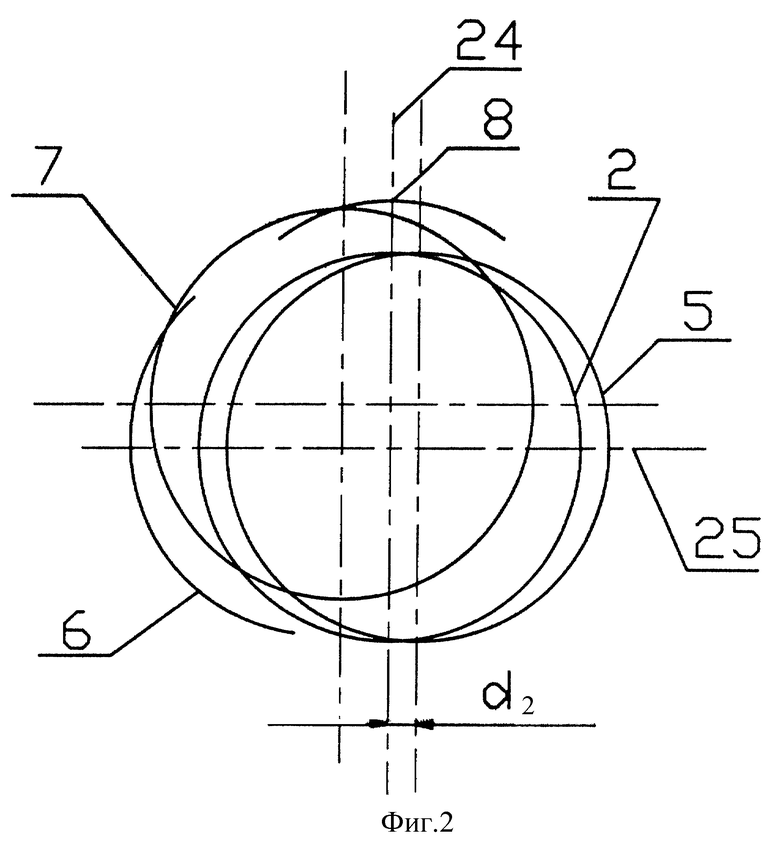
фиг. 2 - вид на двигательную установку со стороны сопла двигателя,
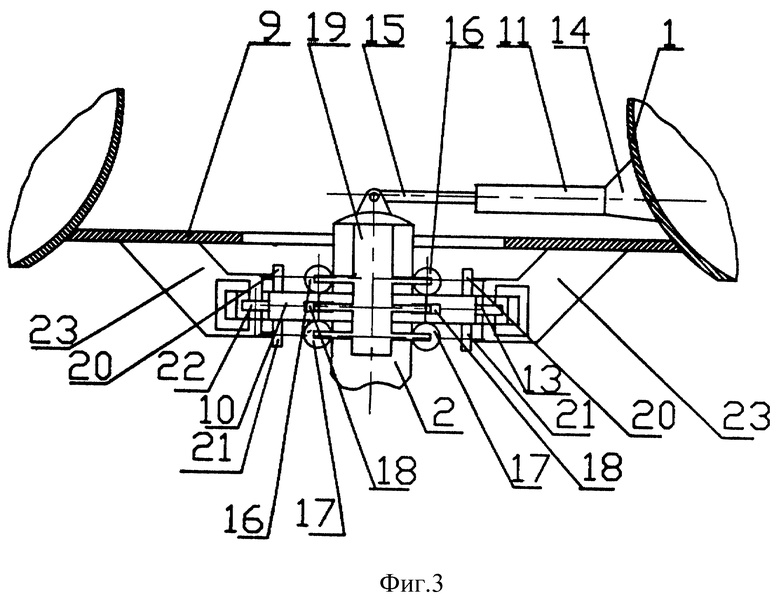
фиг. 3 - подвес двигателя в разрезе,
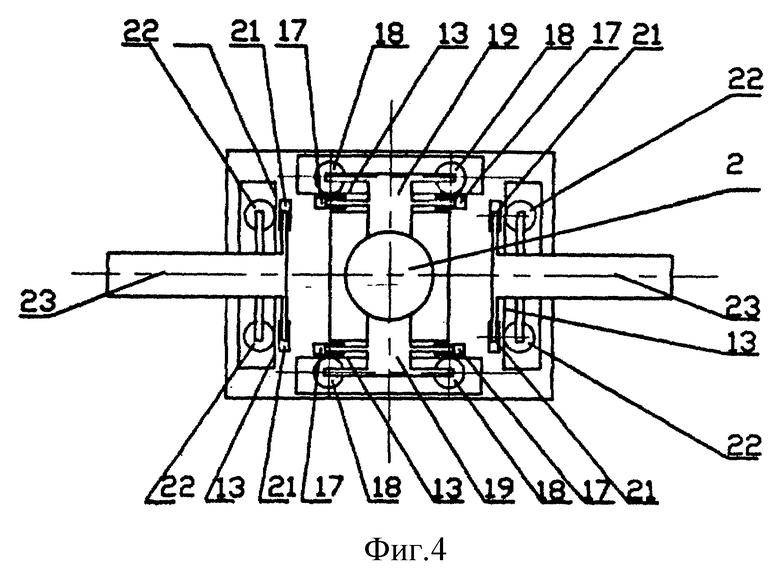
фиг. 4 - вид на подвес двигателя снизу,
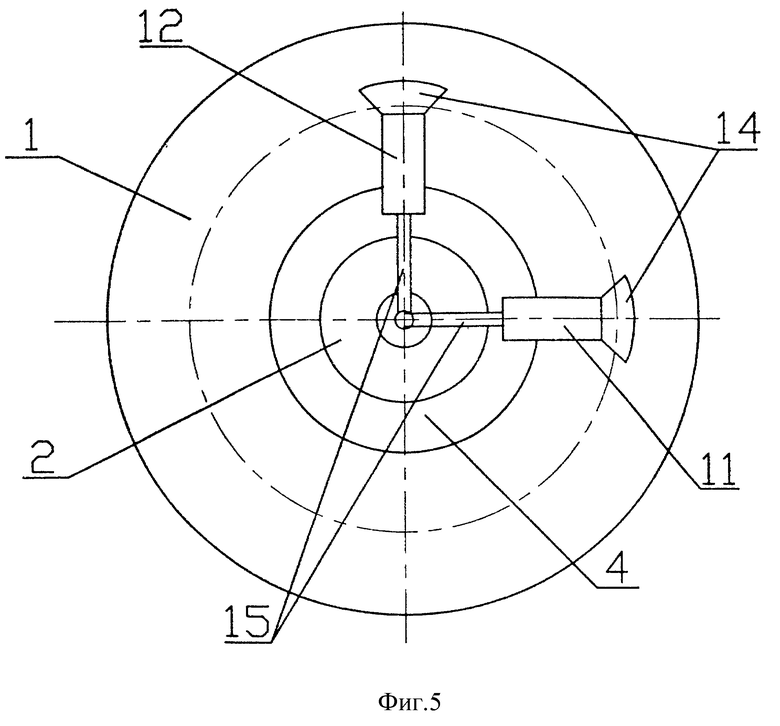
фиг. 5 - вид на подвес двигателя сверху.
Предлагаемая двигательная установка устроена следующим образом.
Двигательная установка содержит корпус 1, ракетный двигатель 2, установленный по оси 3 двигательной установки, и подвес двигателя 4. Корпус двигательной остановки может быть выполнен в виде торового бака, в осевом проеме которого размещен ракетный двигатель. Подвес двигателя выполнен с возможностью обеспечения плоскопараллельного перемещения двигателя относительно плоскости, перпендикулярной продольной оси двигательной установки. Позициями 5, 6, 7, 8 обозначены различные положения ракетного двигателя при его работе, перевод в которые выполняется подвесом. Кроме указанных элементов в состав двигательной установки входит не показанная на чертежах система управления, включающая традиционные для ракетно-космической техники элементы, электрически соединенные с подвесом.
Плоскопараллельное перемещение двигателя может быть обеспечено выполнением подвеса в соответствии с предлагаемым устройством подвеса.
Предлагаемый подвес ракетного двигателя устроен следующим образом. Подвес ракетного двигателя содержит неподвижную платформу 9, закрепленную на корпусе двигательной установки 1, подвижную платформу 10, две рулевые машинки 11 и 12, размещенные взаимно перпендикулярно в плоскости, перпендикулярной продольной оси двигательной установки.
Подвижная платформа выполнена в форме плоской пластины с осевым проемом, расположенной перпендикулярно продольной оси двигательной установки. При использовании этого подвеса в составе двигательной установки в этом проеме целесообразно разместить ракетный двигатель. Подвижная платформа снабжена дорожками качения 15, плоскости которых параллельны осям рулевых машинок и продольной оси двигательной установки. В показанном на фиг. 3 и 4 примере выполнения подвеса подвижная платформа выполнена в форме прямоугольника, в котором выполнены четыре прямоугольные прорези, при этом дорожки качения расположены на внутренних боковых торцах прорезей. Подвижную платформу целесообразно выполнить из высокопрочного материала, например стали.
Основания 14 рулевых машинок соединены с корпусом двигательной установки, а их исполнительные элементы 15 соединены с ракетным двигателем.
Подвес снабжен двумя группами роликов, контактирующих с подвижной платформой.
Первая группа роликов (поз. 16, 17, 18) закреплена на ракетном двигателе с помощью кронштейнов 19. Ролики первой группы размещены симметрично относительно продольной оси.
Вторая группа роликов (поз. 20, 21, 22) закреплена с помощью кронштейнов 23 на неподвижной платформе. Ролики второй группы размещены также симметрично относительно продольной оси.
Ролики первой группы выполнены с возможностью перемещения в направлении оси первой рулевой машинки 11, а ролики второй группы - в направлении оси второй рулевой машинки 12.
Ролики каждой группы расположены в два яруса, первый ярус (ролики 16 в первой группе и ролики 20 во второй) размещен сверху подвижной платформы, а второй ярус (ролики 17 в первой группе и ролики 21 во второй) снизу.
Группы роликов снабжены дополнительными роликами 18 и 22, контактирующими с дорожками качения подвижной платформы. Дополнительные ролики закреплены на двигателе в первой группе и на неподвижной платформе во второй группе. Дополнительные ролики первой группы выполнены с обеспечением возможности перемещения вдоль дорожек качения в направлении оси первой рулевой машинки, а дополнительные ролики второй группы в направлении оси второй рулевой машинки.
Предлагаемая двигательная установка работает следующим образом.
При воздействии на ракетный аппарат в процессе работы возмущающего момента относительно поперечных осей 24 и 25 двигательной установки система управления вырабатывает управляющий сигнал, и подвес двигателя плоскопараллельно перемещает двигатель для парирования момента. Так при возникновении возмущающего момента относительно оси 24 подвес перемещает двигатель в положение 5 или 6 на расстояние d1 или d2 от продольной оси. При этом сохраняется параллельность оси двигателя продольной оси двигательной установки. За счет этого происходит парирование возмущающего момента.
Управление двигательной установкой по крену может быть осуществлено за счет использования реактивных сопел.
Предлагаемый подвес двигателя работает следующим образом. Управляющий сигнал от системы управления поступает на рулевые машинки, и их исполнительный элемент перемещается в плоскости, перпендикулярной продольной оси двигательной установки. При этом ракетный двигатель за счет вращения роликов первой группы перемещается относительно подвижной платформы в направлении одной из поперечных осей, а за счет вращения роликов второй группы вместе с подвижной платформой в направлении второй поперечной оси. Два яруса роликов передают в процессе работы двигателя силу тяги двигателя от двигателя через неподвижную платформу к корпусу установки. Дополнительные ролики обеспечивают перемещение двигателя вдоль осей рулевых машинок. Предлагаемые технические решения позволяют создать эффективную двигательную установку космического аппарата с небольшим продольным габаритом и размещением вблизи ракетного двигателя центра масс аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568527C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2090463C1 |
| УПРАВЛЯЕМЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2109158C1 |
| СПОСОБ ВЫВЕДЕНИЯ СПУТНИКА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 1999 |
|
RU2164880C1 |
| АВТОНОМНЫЙ РАКЕТНЫЙ БЛОК | 1993 |
|
RU2043956C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2121071C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2221995C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА В КОЛЛИНЕАРНЫЕ ТОЧКИ ЛИБРАЦИИ СИСТЕМЫ СОЛНЦЕ - ЗЕМЛЯ | 1989 |
|
SU1840856A1 |
| РАКЕТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ЕГО ВАРИАНТЫ) И РАКЕТНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2094333C1 |
| МНОГОРАЗОВЫЙ УСКОРИТЕЛЬ ПЕРВОЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 1999 |
|
RU2148536C1 |
Изобретение относится к ракетно-космической технике, а именно к устройству двигательных установок космических аппаратов. Согласно изобретению двигательная установка содержит ракетный двигатель, закрепленный в подвесе. Подвес выполнен с обеспечением возможности плоскопараллельного перемещения двигателя перпендикулярно продольной оси установки (оси тяги). Это достигается наличием подвижной и неподвижной платформ подвеса и перпендикулярными друг другу рулевыми машинками. Машинки размещены в плоскости, перпендикулярной продольной оси двигательной установки. С платформами, двигателем и рулевыми машинками взаимодействуют группы роликов, дающих возможность перемещения двигателя в направлении осей рулевых машинок. Изобретение обеспечивает эффективное парирование возмущений, возникающих вследствие смещения оси тяги двигателя от центра масс космического аппарата. 2 с. и 3 з.п.ф-лы., 5 ил.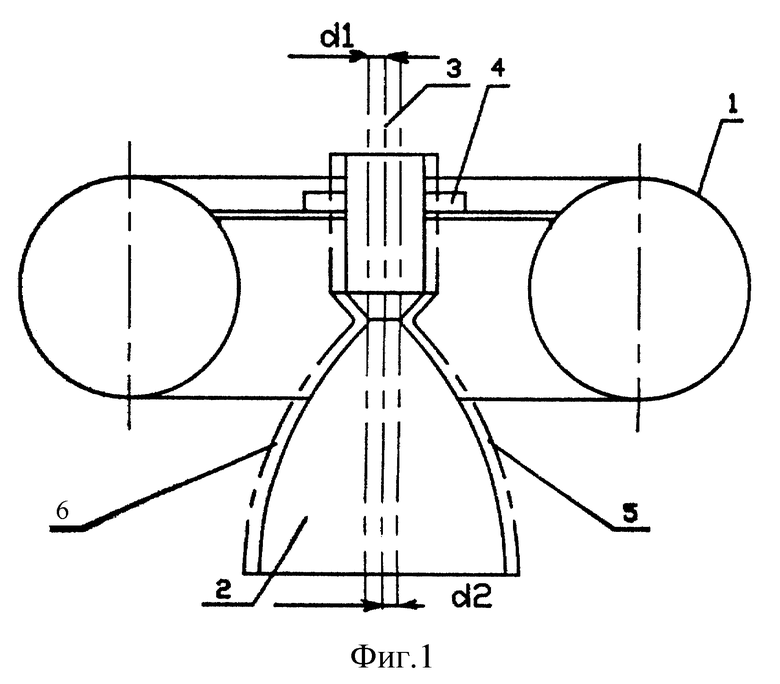
| Технология сборки и испытания космических аппаратов | |||
| /Под ред | |||
| И.Т | |||
| Белякова и И.А | |||
| Зернова | |||
| - М.: Машиностроение, 1990 | |||
| с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.: Наука, 1971, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |
| ТРАНСФОРМИРУЕМЫЙ ПРЕДМЕТ ОДЕЖДЫ | 2002 |
|
RU2214143C1 |
