Изобретение относится к космической технике, в частности к устройствам систем управления космическими аппаратами (КА) в пространстве.
Известен КА с ориентацией с использованием солнечного паруса, в котором блок грубой солнечной ориентации содержит каркас, состоящий из стержней, образующих усеченную пирамиду с осью, совпадающей с продольной осью аппарата, являющихся ребрами пирамиды и закрепленными одними своими концами, составляющими основание каркаса, на торце корпуса, противоположном торцу корпуса, ориентированному на Солнце, а также содержит солнечный парус, закрепленный на стержнях этого каркаса симметрично продольной оси аппарата, при этом управляющие поверхности блока точной ориентации закреплены на других концах стержней каркаса с возможностью дополнительного поворота вокруг еще двух осей, ортогональных первой оси [1].
Недостатком систем ориентации, использующих солнечные паруса, управляемые рули является низкое давление солнечной радиации и как следствие невысокие динамические характеристики этих систем. К конструкции управляющих солнечных рулей и исполнительных механизмов из-за невысоких энергетических возможностей предъявляются жесткие весовые требования.
В качестве прототипа выбрано устройство для ориентации космического аппарата, содержащее систему управления и исполнительные органы, двигатель ориентации, баллон с рабочим телом, электроклапан [2].
Однако исполнительные органы отрабатывают корректирующие импульсы моментов только за счет управления расходом рабочего тела в двигателе ориентации, что не позволяет использовать возможности современных бортовых средств вычислительной техники и автоматики для повышения точности исполнительных воздействий и экономии рабочего тела. Такие недостатки проявляются при проектировании средств с повышенными требованиями к точности ориентации КА в условиях высокого быстродействия, а также при проектировании малогабаритных КА с длительным сроком активного существования.
Целью изобретения является повышение точности ориентации.
Это достигается тем, что в устройстве для ориентации космического аппарата, содержащем систему управления и исполнительные органы, включающие двигатель ориентации, баллон с рабочим телом, электроклапан, двигатель ориентации установлен на космическом аппарате с возможностью перемещения относительно центра масс космического аппарата на выдвижной штанге, взаимодействующей с исполнительным электроделителем, связанным с передаточным механизмом и информационной системой позиционирования штанги и с электроклапаном управления этого двигателя. Кроме того, предлагаемое устройство выполнено таким образом, что двигатель ориентации установлен на штанге с возможностью углового перемещения вокруг оси крепления штанги. Система управления дополнительно снабжена блоком регулирования положения двигателя ориентации и расчета корректирующего момента при текущем значении положения двигателя ориентации.
На фиг. 1 показана схема устройства; на фиг.2 - то же, общий вид; на фиг.3 - то же, с угловым перемещением ДУ СО.
Пример реализации устройства приведен на фиг.1.
Устройство состоит из корпуса 1, двигательной установки системы ориентации (ДВСО) 2, включающей сопло и управляющий электроклапан 3, связанный трубопроводом 4, запасом рабочего тела, например в баллоне 5 сжатого газа, размещаемой на корпусе КА на выдвижной штанге 6, управляемой с помощью информационно-силового модуля 7 механизма перемещения штанги на основе цифроаналоговых систем позиционирования с бортовым процессором 8 в совмещенном варианте построения. В этом варианте БЦВМ включается в контур позиционирования и не только выполняет функции задающего устройства, но и осуществляет сравнение входной и выходной информации, вырабатывает сигналы коррекции, формирует алгоритмы управления. Информационно-силовой модуль 7 содержит шаговый, предпочтительный при цифровом управлении, или вентильный электродвигатель 9, эффективный при безредукторном варианте построения электромеханотронного преобразователя. Информационно-силовой модуль (ИСМ) состоит из исполнительного электроделителя на основе этого электродвигателя; передаточного механизма и измерительно-информационной системы позиционирования. ИСМ управляют через блок усилительно-преобразовательного устройства (УПУ) 10 от блока формирования управляющих воздействий БФВ 11 и блока задания программы БЗП 12. БЗП в совмещенном варианте входит в структуру БЦВМ. Измерительно-информационная система позиционирования 13 обеспечивает контроль положения штанги в любой момент времени и выдачу информации об этом в цифровой форме. Размах перемещения штанги равен αL.
БФВ, УПУ, ИСМ и объект управления - штанга с ДУ СО составляют электромеханотронный преобразователь ЭМТП. Схема расположения исполнительных органов СО и соответственно число выдвигаемых штанг определяют общую структуру ЭМТП.
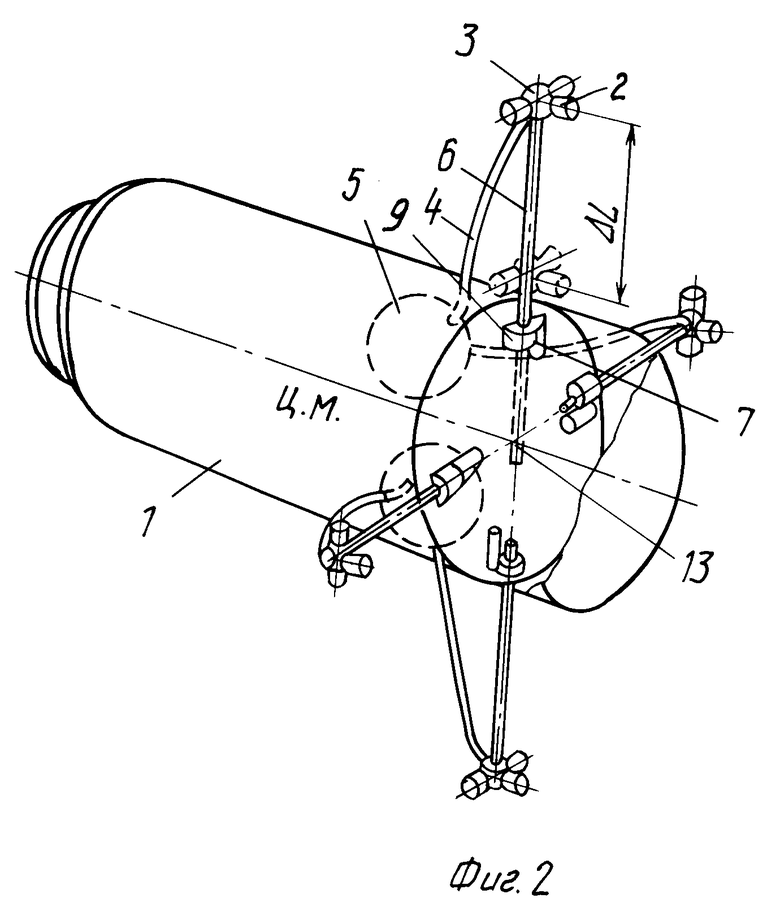
На фиг.2 приведен пример реализации устройства на малогабаритном космическом аппарате. Показана схема с четырьмя выдвижными штангами 6, на которых размещены ДУ СО 2 независимого управления, имеющие собственный электропривод. При этом изменение плеча производят при управлении ориентацией по трем осям: тангажу, крену и рысканию. В зависимости от показателей бортового процессора и технических конструктивных требований возможен вариант оснащения выдвижными штангами по одной или двум осям ориентации, а также объединения электропривода управления штангами.
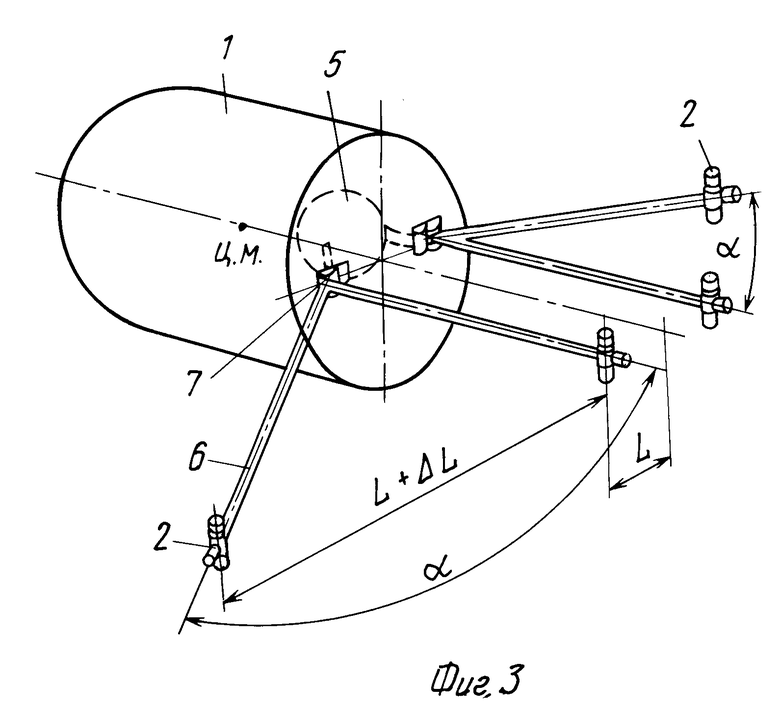
На фиг.3 приведен пример устройства управления ориентацией КА с угловым перемещением исполнительных органов, при этом ДУ СО 2 размещены на концах штанг 6 отклоняемых на угол α информационно-силовым модулем 7, за счет чего происходит изменение расстояния между приложенным импульсом силы и центром масс аппарата.
Предлагаемое устройство (например, по схеме на фиг.1) работает следующим образом.
БЦВМ системы ориентации КА определяет по известным методам значение корректирующего импульса для КА. Это значение обрабатывают в блоке БЗП, в котором заложены память программы и логико-вычислительное устройство, выполняющее первичную обработку команд программы и выдачу их на вход контуров управления перемещением в согласованной форме. Выдача команд обусловлена наличием ответного сигнала об исполнении предыдущих команд или является функцией времени. Импульс отрабатывается по двум вариантам: или двигателем ориентации по каналу управления электроклапаном при установленном плече приложения импульса силы, равном расстоянию от оси двигателя до центра масс КА, или двигателем при измененном значении плеча, при этом значение плеча устанавливается по каналу управления выдвижения штанги, а значение импульса двигателя пересчитывается на новое заданное плечо.
В логическом блоке осуществляются выбор варианта управления отработкой корректирующего импульса с изменением плеча, т.е. расстояния между осью двигателя и осью, проходящей через центр масс КА (ЦМ), или без изменения и соответствующий пересчет управляющих сигналов, например число включений электроклапана газового баллона ДУ. При выборе варианта учитываются условия движения КА и его состояние. В блоке памяти введены коррегирующие значения собственных характеристик исполнительных органов, значения которых используются для повышения точности расчета импульсов коррекции.
Точное текущее значение плеча вводится в логический блок цифровым датчиком измерительно-информационной системы 13. Газовый баллон (и электроклапан) размещен в корпусе КА (см. фиг.2), тогда ДУ на передвижной штанге и соединяется с ним гибким трубопроводом. Подвижное размещение исполнительных органов системы ориентации может быть выполнено с различными видами двигательных установок и конструктивными исполнениями, например при комбинации подвижного и неподвижного размещений исполнительных органов СР на корпусе КА. Подвижная штанга может обеспечивать не только линейное перемещение исполнительных органов, но и угловое (например, см. фиг.3) по углу α изменяет плечо L. В зависимости от функциональных требований управление перемещением ДУ может быть дискретным или непрерывным.
Использование изобретения позволяет увеличить точность управления ориентацией малогабаритных КА за счет двухпараметрической отработки корректирующего момента импульса при дополнительном управлении плечом момента и позволяет повысить экономичность систем ориентации аппаратов длительного существования за счет введения режимов работы исполнительных органов СО на измененном (увеличенном) плече в допускаемых случаях.
Изобретение относится к космической технике, в частности к устройствам систем управления космическими аппаратами в пространстве. Целью изобретения является повышение точности ориентации. На корпусе космического аппарата 1 двигательная установка системы ориентации 2, включающая сопло и управляющий электроклапан 3, связанный трубопроводом 4 с баллоном сжатого газа 5, размещена на выдвижной штанге 6, перемещаемой исполнительным электроделителем на основе электродвигателя 9. Информационная система позиционирования 13 штанги обеспечивает контроль положения штанги в любой момент времени и выдачу информации об этом. 3 з.п.ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 3826087, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
