Предлагаемое изобретение относится к области ракетно-космической техники по разделу системы управления космическими аппаратами (КА).
Особенности рассматриваемого класса КА состоит в том, что по условиям компоновки:
1. Плечо управляющего момента мало из-за близости точки опоры двигательной установки (ДУ) к центру масс КА.
2. Кроме возмущения в виде момента, возмущение в виде силы также имеет значительную величину.
Известна система стабилизации (СС) рассматриваемого класса КА, состоящая из датчика угла, корректирующего контура, усилителя, пулевого привода.
Указанная система имеет следующие недостатки:
1. Она неэффективна при стабилизации КА с малым плечом управления.
2. Не обеспечиваются малые погрешности стабилизации поперечных скоростей центра масс КА, т.к. кроме возмущающего момента, возмущающая сила имеет значительную величину (по причине малого плеча угла поворота двигателя требуются большие и дающие соответственно большие составляющие поперечных сил).
Наиболее близким техническим решением для предлагаемой системы является автомат стабилизации (АС), состоящий из корректирующего контура, акселерометра, интегратора, суммирующего усилителя, рулевой машинки, отрицательной обратной связи.
Однако этот АС по указанным выше причинам также не может быть использован для точной стабилизации поперечных скоростей на участках коррекции траектории при действии возмущающей силы и при малом плече управляющего момента.
Общим принципиальным недостатком вышеуказанных систем стабилизации является то, что в качестве исполнительного органа используется поворотная двигательная установка в кардановом подвесе. При малом плече управления, определяемом расстояние между центром тяжести КА и точкой приложения силы от ДУ, для получения управляющего момента с целью парирования возмущения требуются значительные углы и угловые скорости поворота камеры сгорания ДУ. Это неизбежно вызывает большую составляющую боковой (поперечной) возмущающей силы.
В предлагаемом изобретении этот недостаток устраняется тем, что камера сгорания (КС) перемещается линейно вдоль осей стабилизации КА, что создает только управляющий момент без большой поперечной силы.
Сущность изобретения заключается в том, что в систему стабилизации КА, содержащую двигательную установку с камерой сгорания, точка опоры которой расположена вблизи центра масс КА, каналы управления по тангажу и рысканию, каждый из которых выполнен в виде последовательно соединенных суммирующего усилителя и рулевой машинки, дополнительно введены в каждый канал датчик отклонения углового ускорения и угловой скорости относительно центра масс КА и датчик отклонения линейной скорости центра масс КА, выходы которых соединены со входами суммирующего усилителя, а камера сгорания двигательной установки установлена с возможностью линейного перемещения вдоль поперечных осей КА.
Техническим результатом является повышение точности стабилизации и режиме коррекции траектории путем повышения точности стабилизации поперечных скоростей центра масс КА.2 На фиг. 1 приведена блок-схема предлагаемой СС центра масс в направлении оси Y. Она состоит для канала Т из датчика отклонения линейных ускорений и скорости 1, датчика отклонения угловых ускорения и скорости 2, соединенных с суммирующим усилителем 3, выход которого подсоединен ко входу рулевой машинки 4 (РМ). Шток РМ линейно перемещает камеру сгорания (КС) ДУ 5 по направляющим и прижимным роликам и промежуточной плате.
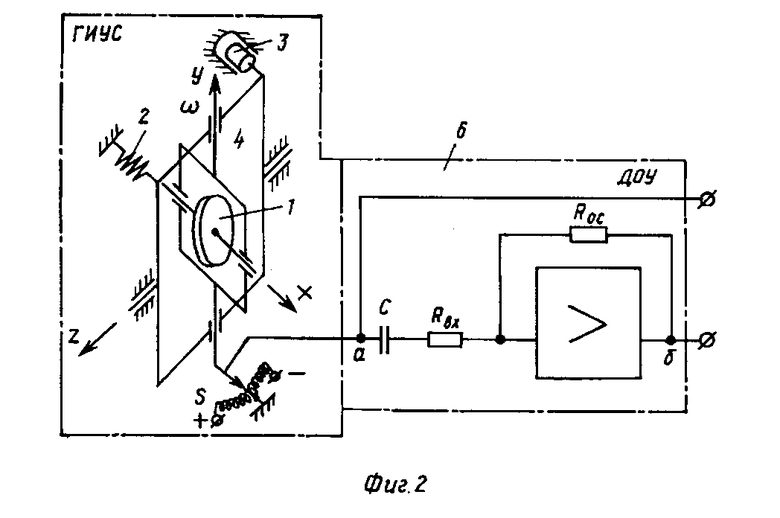
На фиг. 2 приведена схема датчика отклонения угловых ускорения и скорости КА.
Он содержит последовательно соединенные гироскопический измеритель угловой скорости и дифференцирующий операционный усилитель. Он содержит гироскоп 1, пружину 2, демпфер 3, рамки 4, потенциометр 5.
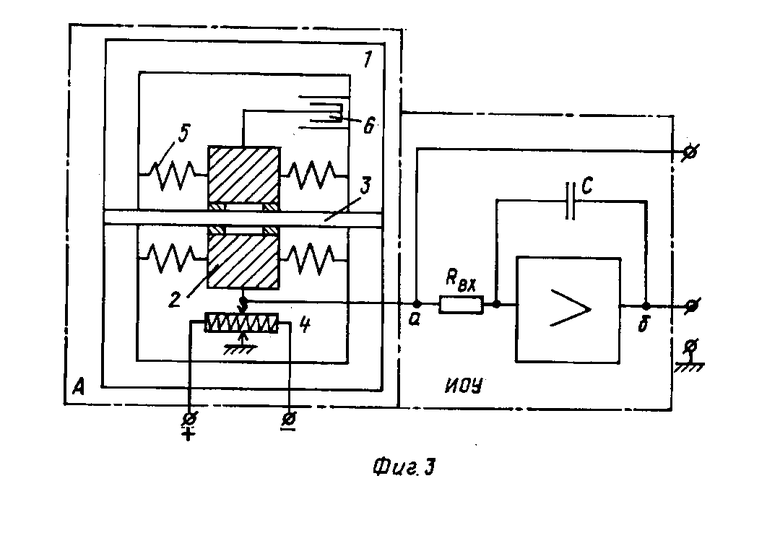
На фиг. 3 представлена схема датчика отклонения линейных ускорения и скорости КА.
Он содержит последовательно соединенные акселерометр (А) и интегрирующий операционный усилитель (ИСУ). Он содержит корпус 1, инерционную массу 2, направляющие 3, датчик сигнала 4, пружину 5, демпфер 6.
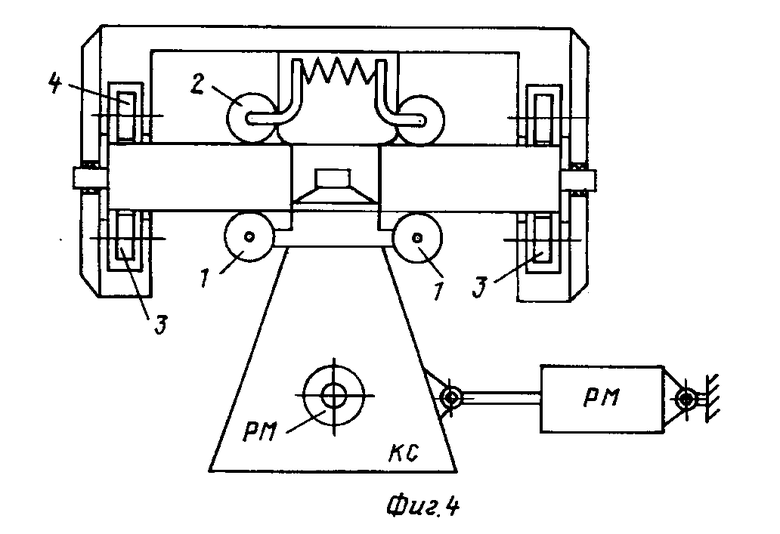
На фиг. 4 показана схематическая конструкция ДУ. Линейное перемещение КС обеспечивается поступательным перемещением в двух независимых ортогональных направлениях вдоль осей КА по оси Y для канала Т и по оси Z для канала Р.
Система стабилизации работает следующим образом.
Ввиду идентичности каналов СС по тангажу (Т) и рысканию (Р) и для упрощения описания рассматривается канал Т.
Предлагаемая СС работает по каналу Т (аналогично по каналу Р) следующим образом: с выходов блоков 1 и 2 сигналы поступают на блок 3, с которого управляющий сигнал поступает на блок 4, перемещающий КС (блок 5) и создающий управляющий момент относительно центра масс КА.
Характерной и принципиальной особенностью предлагаемой системы в отличие от прототипа является то, что на вход блока 3 не подаются:
сигнал обратной связи с рулевой машинки;
сигнал, пропорциональный угловому отклонению КА;
сигнал, пропорциональный линейному отклонению КА.
Предлагаемая СС является авторским приближением системы к инвариантной.
Для системы уравнений, описывающей динамику движения для канала Т
условие полной инвариантности
по возмущающему моменту Mв
по возмущающей силе Fв
Где
(1) уравнение моментов;
(2) уравнение сил;
(3) уравнение управления;
v угловое отклонение КА по Т;
y линейное перемещение КА вдоль оси Y;
δ перемещение исполнительного органа;
aоб, ayv, ayv коэффициенты уравнения;
Wсс передаточная функция системы стабилизации;
fупр функционал управления, содержащий функционал F1 по Y, функционал F2 по v и коэффициент обратной связи привода Кос,
P оператор Лампласа и Ксх крутизна скоростной характеристики привода.
Добиться в реальной системе выполнения полной инвариантности (нулевого отклонения) сложно. Предлагаемая СС позволяет минимизировать динамическое отклонение по линейной скорости центра масс при ограниченном времени, присущем режиму коррекции траектории КА путем частичного удовлетворения условий инвариантности, т.е. приближение к нулевым значениям условий (4) и (5). Это достигается:
отключением обратной связи Kсо=0),
формированием алгоритма управления таким образом, чтобы при P _→ 0 передаточная функция СС Wсс _→ 0 за счет отключения позиционных составляющих по v и y в функционалах управления F1 и F2.
Датчик отклонения угловых ускорения и скорости КА представлен на фиг. 3. Здесь ГИУС измеряет значения угловой скорости вокруг оси чувствительности Y. Пружина 2 служит для баланса гироскопического момента гироскопа, а демпфер 3 для сглаживания колебаний собственной частоты. Установившееся положение соответствует равенству гироскопического момента и момента пружины, оно регистрируется потенциометром 5 и электрический сигнал поступает на выход "а", пропорциональный угловой скорости около центра масс, а также на вход дифференцирующего операционного усилителя, передаточная функция которого ,
,
где
Tд=RосC постоянная времени дифференцирования;
Tа=RвC постоянная времени фильтрации высоких частот помехи.
Таким образом на выход "б" датчика поступает отфильтрованный электрический сигнал, пропорциональный угловому ускорению около центра масс КА.
Схема датчика отклонения линейных ускорения и скорости КА (блок 1) приведена на фиг. 3.
Акселерометр измеряет линейное ускорение КА вдоль оси чувствительности прибора. Инерционная сила массы 2, пропорциональная ускорению, уравновешивается силой пружин 5 при перемещении массы вдоль направляющей 3. Собственные колебания сглаживаются демпфером 6. В результате смещенное равновесное состояние фиксируется потенциометром 4 и в виде электрического сигнала, пропорционального линейному ускорению центра масс КА, поступает на выход "а", а также на вход интегрирующего операционного усилителя. Передаточная функция ПОУ ,
,
где
Tп=RвхC постоянная времени интегрирования.
Таким образом, на выход "б" датчика поступает электрический сигнал, пропорциональный линейной скорости центра масс КА.
Ролики направляющие 1, 3 и прижимные 2, 4 выполнены в виде цилиндрических элементов, катящихся по направляющим, причем прижимные ролики 2, 4 прижимаются пружинами для исключения люфта. Промежуточное основание 5 конструктивно выполнено в виде платы, вдоль которой по направляющей на роликах 1, 2 линейно перемещается КС вдоль оси Y, а сама плата линейно перемещается на роликах 3, 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568527C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА И ПОДВЕС ДВИГАТЕЛЯ | 1997 |
|
RU2175935C2 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| Способ стабилизации углового движения некооперируемого объекта при бесконтактной транспортировке | 2018 |
|
RU2684022C1 |
| АВТОНОМНЫЙ РАКЕТНЫЙ БЛОК | 1993 |
|
RU2043956C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| СПОСОБ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА С КОМБИНИРОВАННЫМИ ГИРОИНЕРЦИОННЫМИ И РЕАКТИВНЫМИ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ | 1989 |
|
RU2090462C1 |
| СПОСОБ СИНХРОНИЗАЦИИ УГЛОВЫХ СКОРОСТЕЙ ДВИЖЕНИЯ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА С ПАССИВНЫМ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2603301C1 |
| Способ синхронизации угловых скоростей активного космического аппарата с пассивным космическим аппаратом | 2017 |
|
RU2662318C1 |
| Способ определения времени до встречи активного объекта с космическим аппаратом при параллельном сближении | 2017 |
|
RU2668140C1 |
Использование: в ракетно-космической технике. Сущность: система стабилизации космического аппарата содержит каналы управления по тангажу и рысканью из последовательно соединенных датчика отклонения углового ускорения и угловой скорости, суммирующего усилителя и рулевой машинки, датчика отклонения линейного ускорения и линейной скорости, двигательной установки, камера сгорания которой установлена с возможностью линейного перемещения вдоль поперечных осей космического аппарата. 4 ил.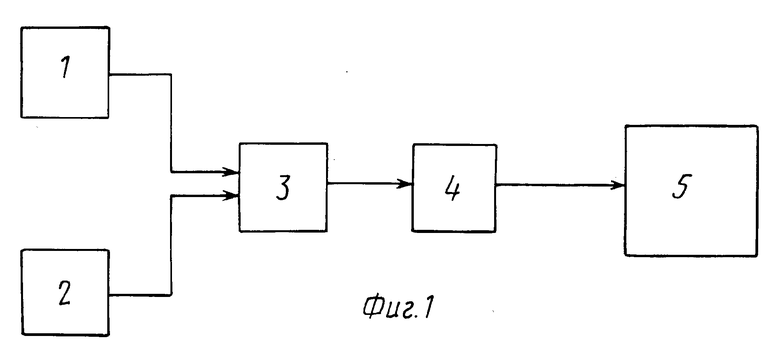
Система стабилизации космического аппарата (КА), содержащая двигательную установку с камерой сгорания, точка опоры которой расположена вблизи центра масс КА, каналы управления по тангажу и рысканью, каждый из которых выполнен в виде последовательно соединенных суммирующего усилителя и рулевой машинки, отличающаяся тем, что в каждый канал дополнительно введены датчик отклонения углового ускорения и угловой скорости относительно центра масс КА и датчик отклонения линейного ускорения и линейной скорости центра масс КА, выходы которых соединены с входами суммирующего усилителя, а камера сгорания двигательной установки установлена с возможностью линейного перемещения вдоль поперечных осей КА.
| Алексеев К.Б., Бебенин Г.Г | |||
| Управление космическим летательным аппаратом | |||
| - М.: Машиностроение, 1964, с | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ОСАДКИ ВАЛОВ ПАРОВЫХ ТУРБИН | 1917 |
|
SU283A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
