Устройство относится к измерительной технике и предназначено для обработки сигналов лазерных доплеровских измерителей скорости потоков жидкости и газов.
Известны следящие электронные системы с автоподстройкой частоты [1, 2, 3], содержащие последовательно соединенные смеситель, вход которого является входом устройства, усилитель промежуточной частоты, ограничитель, частотный детектор, интегрирующий RC-фильтр, усилитель постоянного тока и генератор управляемой частоты, выход которого подключен ко второму входу смесителя и к цифровому частотомеру. Такие системы имеют ограниченное быстродействие и высокие статическую и динамическую погрешности измерения частоты.
Известны также следящие системы обработки сигнала доплеровского измерителя скорости [4], содержащие два квадратурных канала измерения, состоящих из последовательно соединенных смесителя и фильтров низких частот, при этом первые входы смесителей объединены вместе и являются входом системы, а вторые входы подключены к первому и второму выходам квадратурного генератора. В состав следящей системы входят четыре операционных усилителя с дифференцирующими и суммирующими входами, четыре квадратора, три дифференциальных усилителя, входы которого подключены к фильтрам низких частот, а выход через электронный ключ подключен к входу квадратурного генератора. Управляющий вход электронного ключа соединен с выходом амплитудного детектора, вход которого подключен к входу следящей системы. Такие следящие системы обладают недостаточной точностью измерения, обусловленной ограниченными возможностями аналоговых вычислительных устройств.
Наиболее близким техническим решением по отношению к заявляемому устройству является следящая система [5], содержащая два квадратурных канала измерения, состоящих из последовательно соединенных смесителя, фильтра низких частот разностной частоты и блока дифференцирования, при этом первые входы смесителей объединены вместе и являются входом устройства, а вторые входы подключены соответственно к первому и второму выходам квадратурного генератора частоты. Следящая система содержит также два умножителя, выходы которых подключены к сумматору, а первый вход каждого из умножителей подключен соответственно к выходу блока дифференцирования своего канала, а второй вход соединен с входом блока дифференцирования противоположного канала. Сумматор подключен к интегратору, выход которого связан с входом квадратурного генератора.
Указанные следящие системы измерения частоты доплеровского сигнала [4, 5] не имеют статической ошибки, а динамическая ошибка измерения частоты существенно меньше благодаря непрерывной коррекции результата, осуществляемой в интеграторе по вычисленным значениям мгновенной частоты, однако погрешность измерения достаточно высока, что обусловлено использованием в них аналоговых вычислительных блоков.
Предложенный следящий фильтр-процессор для обработки сигналов лазерного доплеровского измерителя скорости содержит два квадратурных канала измерения. Каждый канал состоит из последовательно соединенных смесителя, фильтра низких частот разностной частоты и блока дифференцирования. Первые входы смесителей объединены вместе и являются входом устройства, а вторые входы подключены соответственно к первому и второму выходам квадратурного генератора частоты. Следящий фильтр-процессор, кроме того, содержит четыре устройства выборки и хранения сигнала, последовательно соединенные коммутатор и аналого-цифровой преобразователь, причем выходы устройств выборки и хранения сигнала соединены с входами коммутатора, первые входы первого и второго устройств выборки и хранения сигнала подключены к выходам соответственно фильтра низких частот разностной частоты и блока дифференцирования первого квадратурного канала, а первые входы третьего и четвертого устройств выборки и хранения соответственно к выходам фильтра низких частот и блока дифференцирования второго квадратурного канала.
В заявляемое устройство входят микропроцессор мгновенных значений разностной частоты и соединенный с шиной этого микропроцессора интерфейсный блок, первый выход которого соединен со вторыми входами всех устройств выборки и хранения сигнала, второй выход соединен с управляющим входом коммутатора, а третий и четвертый выходы подключены соответственно к входу запуска аналого-цифрового преобразователя и входу записи данных квадратурного генератора частоты. Вход и выход данных интерфейсного блока соединены соответственно с выходом аналого-цифрового преобразователя и с входом данных квадратурного генератора частоты.
Новыми предложенными элементами устройства являются четыре устройства выборки и хранения сигнала, последовательно соединенные коммутатор и аналого-цифровой преобразователь, причем выходы устройств выборки и хранения соединены с входами коммутатора, первые входы первого и второго устройств выборки и хранения сигнала подключены к выходам соответственно фильтра низких частот разностной частоты и блока дифференцирования первого квадратурного канала, а первые входы третьего и четвертого устройств выборки и хранения соответственно к выходам фильтра низких частот и блока дифференцирования второго квадратурного канала, микропроцессор мгновенных значений разностной частоты, соединенный с шиной этого микропроцессора интерфейсный блок, первый выход которого соединен со вторыми входами всех устройств выборки и хранения сигнала, второй выход соединен с управляющим входом коммутатора, а третий и четвертый выходы подключены соответственно к входу запуска аналого-цифрового преобразователя и входу записи данных квадратурного генератора частоты, а вход и выход данных интерфейсного блока соединены соответственно с выходом аналого-цифрового преобразователя и с входом данных квадратурного генератора частоты.
Принципиально новым техническим решением является введение четырех устройств выборки и хранения аналогового сигнала, коммутатора, аналого-цифрового преобразователя, микропроцессора мгновенных значений разностной частоты, к шине которого подключен интерфейсный блок. Введенные блоки обеспечивают более точное цифровое измерение мгновенных значений разностной частоты, что в конечном счете снижает погрешность измерения частоты доплеровского сигнала.
На фиг. 1 представлена схема следящего фильтра процессора для обработки сигналов лазерного доплеровского измерителя скорости.
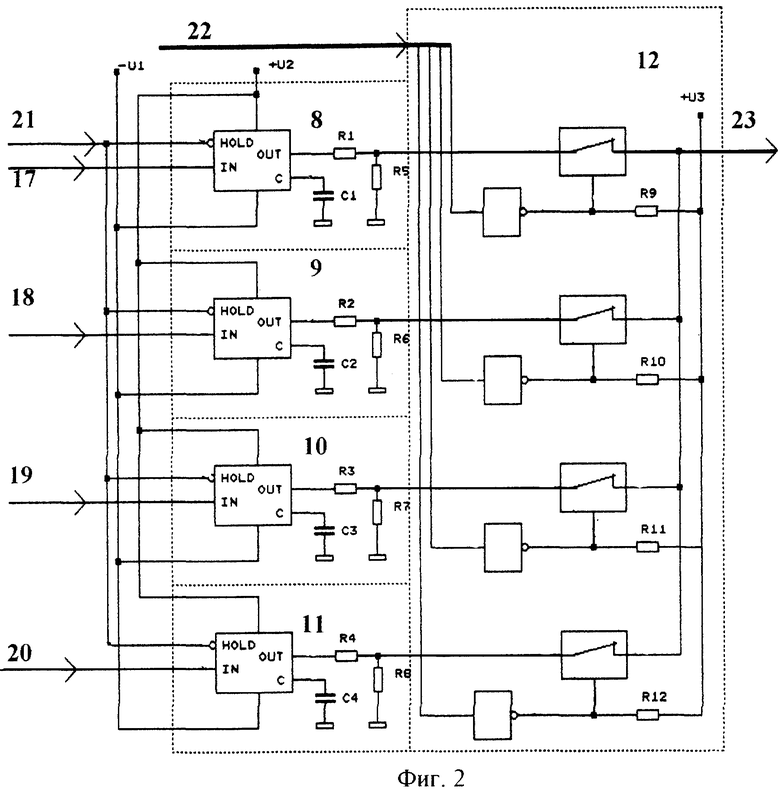
На фиг. 2 представлена принципиальная схема устройств выборки и хранения аналоговых сигналов и коммутатора.
Следящий фильтр-процессор для обработки сигналов лазерного доплеровского измерителя скорости (фиг. 1) содержит два квадратурных канала измерения, состоящих из последовательно соединенных смесителя 1, фильтра низких частот разностной частоты 2 и блока дифференцирования 3 для первого канала измерения и соответственно 4, 5, 6 для второго канала, при этом первые входы смесителей объединены вместе и являются входом устройства, а вторые входы подключены соответственно к первому и второму выходам квадратурного генератора частоты 7. Каждый канал измерения содержит также по два устройства выборки и хранения аналогового сигнала соответственно 8, 9 и 10, 11, выходы которых соединены со входами коммутатора 12, подключенного выходом к входу аналого-цифрового преобразователя 13.
В состав следящего фильтра процессора входит микропроцессор мгновенных значений разностной частоты 14 и соединенный с шиной 15 этого микропроцессора интерфейсный блок 16, первый выход которого соединен со вторыми входами всех устройств выборки и хранения сигнала, второй выход соединен с управляющим входом коммутатора, а третий и четвертый выходы подключены соответственно к входу запуска аналого-цифрового преобразователя и входу записи данных квадратурного генератора частоты, а вход и выход данных интерфейсного блока соединены соответственно с выходом аналого-цифрового преобразователя и с входом данных квадратурного генератора частоты. Первые входы устройств выборки и хранения аналоговых сигналов 8-11 обозначены числами 17-20, вторые входы 21, управляющий вход коммутатора 12 обозначен числом 22, а выход коммутатора 12 числом 23.
Следящий фильтр-процессор имеет три режима работы: поиск частоты, слежение за частотой и хранение кода частоты (при пропадании входного сигнала) и работает следующим образом.
Входной сигнал доплеровской частоты ωd поступает на вход устройства.
В режиме поиска частоты микропроцессор формирует числовую последовательность, изменяющуюся по пилообразному закону, коды которой подаются через интерфейсный блок на вход данных квадратурного генератора частоты. При этом на выходах смесителей 1, 4 формируются два квадратурных сигнала. Эти ортогональные сигналы формируются при смешении доплеровского сигнала с выходными сигналами квадратурного генератора, фаза которых сдвинута относительно друг друга на 90o. Сигналы от фильтров низких частот разностной частоты 2, 5 поступают соответственно на входы 17, 19 устройств 8, 10 выборки и хранения сигналов, а сигналы от блоков дифференцирования 3, 6 поступают соответственно на входы 18, 20 устройств 9, 11 выборки и хранения. Все четыре сигнала с блоков 2, 3 и 5, 6 по команде микропроцессора мгновенных значений разностной частоты 14, поступающей с первого выхода 21 интерфейсного блока 16, фиксируются на конденсаторах C1-C4 (фиг. 2) устройств 8-11 выборки и хранения.
Каждый из полученных сигналов через коммутатор 12 подается на вход аналого-цифрового преобразователя 13. Сигналы с выхода OUT каждого из устройств выборки и хранения через резисторные делители (R1, R5), (R2, R6), (R3, R7) и (R4, R8) поступают на входы коммутатора 12. Порядок их подачи определяют сигналы, поступающие со второго выхода 22 интерфейсного блока 16. Эти сигналы поступают на входы инвертирующих усилителей, нагрузочными сопротивлениями которых являются резисторы R9-R12. Запуск аналого-цифрового преобразователя производится по команде микропроцессора 14. Цифровые коды этих сигналов с выхода аналого-цифрового преобразователя считываются в микропроцессор 14. Микропроцессор 14 вычисляет сумму квадратов ортогональных компонент комплексной амплитуды сигнала разностной частоты A(t) в соответствии с выражением
A2(t) = AS 2(t) + AC 2(t), (1)
где AS(t) и AC(t) - ортогональные компоненты комплексной амплитуды сигнала разностной частоты,
и сравнивает это значение с порогом, превышение которого показывает наличие сигнала разностной частоты на выходе фильтра низких частот. В этот момент формирование микропроцессором числовой последовательности прекращается, а ее последнее значение запоминается в соответствии с программой в памяти микропроцессора и в регистре квадратурного генератора.
Следящий фильтр-процессор переходит в режим слежения. В этом режиме микропроцессор вычисляет мгновенные значения ω(t) разностной частоты в соответствии с выражением
где  (t) = dAS(t)/dt,
(t) = dAS(t)/dt,  (t) = dAC(t)/dt,
(t) = dAC(t)/dt,
суммирует их с текущим хранящимся в его памяти значением кода доплеровской частоты и посылает полученное значение в регистр квадратурного генератора. Таким образом, данные, поступающие на вход данных квадратурного генератора, соответствуют мгновенному значению частоты доплеровского сигнала.
При уменьшении сигнала ниже установленного порога следящий фильтр-процессор переходит в режим хранения и данные на входе квадратурного генератора частоты не изменяются в течение заданного программой времени.
Если в течение этого времени сигнал доплеровской частоты превысит заданный порог, следящий фильтр-процессор возвращается в режим слежения. В противном случае следящий фильтр процессор переходит в режим захвата частоты.
В качестве микропроцессора мгновенных значений разностной частоты в предлагаемом устройстве использован персональный компьютер. Устройства выборки и хранения аналоговых сигналов и коммутатор аналоговых сигналов выполнены соответственно на микросхемах КР1100СК2 и 590КН2, 155ЛН4. В качестве аналого-цифрового преобразователя использована микросхема 1113ПВ1.
Введение микропроцессора, используемого не только для вычисления мгновенных значений разностной частоты, но и в качестве контроллера, расширило возможности заявляемого устройства, а введение устройств фиксации аналоговых сигналов, коммутатора и многоразрядного аналого-цифрового преобразователя, подключенных к шине микропроцессора через интерфейсный блок, позволило снизить погрешность измерения частоты доплеровского сигнала.
Литература
1. В. П. Коронкевич, В.С. Соболев, Ю.Н. Дубнищев. Лазерная интерферометрия. Наука, Сибирское отделение, Новосибирск, 1983.
2. В.П. Клочков, Л.Ф. Козлов, И.В. Потыкевич, М.С. Соскин. Лазерная анемометрия, дистанционная спектрометрия и интерферометрия. Справочник. Наукова думка, Киев, 1985.
3. Авторское свидетельство СССР. N 822069, МКИ G 01 R 23/16 от 26.07.79, 14, 1981.
4. Авторское свидетельство СССР. N 461681, МКИ G 01 P 3/48 от 4.04.1973.
5. Т.Дюрани, К.Грейтид. Лазерные системы в гидродинамических измерениях. Plenum Press, New York, 1977. Перевод на русский язык. Энергия, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ АНАЛИЗАТОР МИКРОЧАСТИЦ И БИОЛОГИЧЕСКИХ МИКРООБЪЕКТОВ | 2000 |
|
RU2186362C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ДАТЧИК СКОРОСТИ ПЕРЕМЕЩАЕМОГО ОБЪЕКТА | 2008 |
|
RU2373543C1 |
| Устройство для обработки сигнала лазерного доплеровского анемометра | 1987 |
|
SU1525579A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА И НЕКОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛИДАР | 2013 |
|
RU2545498C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 1998 |
|
RU2144194C1 |
| УСТРОЙСТВО ДЛЯ МНОГОСЛОЙНОЙ ОПТИЧЕСКОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ | 1999 |
|
RU2172028C2 |
| СПОСОБ МНОГОСЛОЙНОЙ ОПТИЧЕСКОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ДВОИЧНОЙ ИНФОРМАЦИИ | 1999 |
|
RU2161827C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ ПЛАМЕНИ | 1997 |
|
RU2137047C1 |
| АКУСТИЧЕСКИЙ МИКРОСКОП | 2015 |
|
RU2613339C1 |
Фильтр-процессор предназначен для использования в устройствах для бесконтактного дистанционного измерения скорости потоков жидкости и газов, а также твердых диффузно-отражающих объектов. Технический результат - уменьшение погрешности измерения. Фильтр-процессор содержит два квадратурных канала измерения. Каждый канал состоит из последовательно соединенных смесителя, фильтра низких частот разностной частоты и блока дифференцирования. Первые входы смесителей объединены вместе и являются входом устройства, а вторые входы подключены соответственно к первому и второму выходам квадратурного генератора частоты. В следящий фильтр-процессор введены четыре устройства выборки и хранения сигнала, коммутатор, аналого-цифровой преобразователь, микропроцессор мгновенных значений разностной частоты и интерфейсный блок, соединенный с вновь введенными блоками и квадратурным генератором частоты. 2 ил.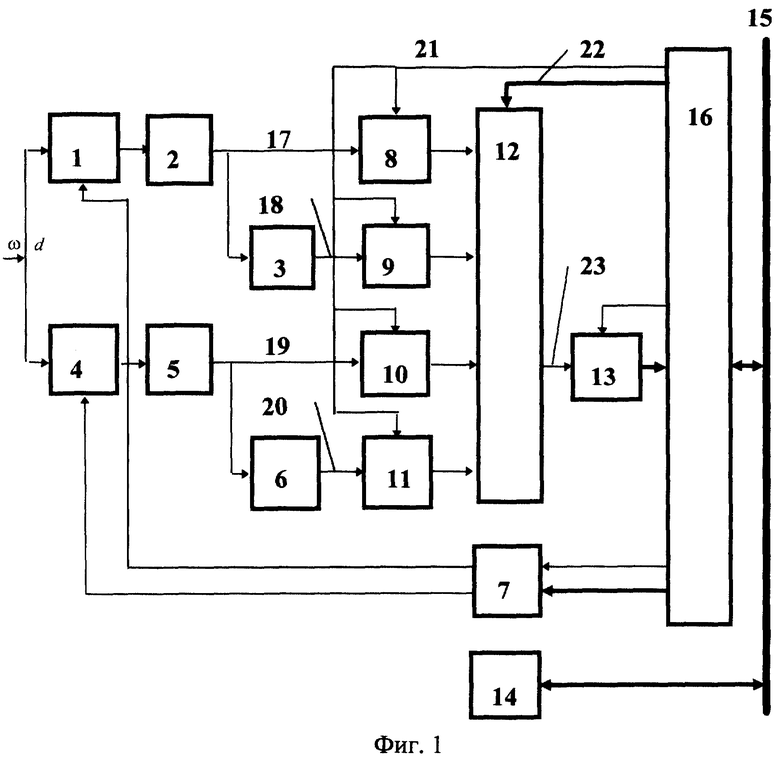
Следящий фильтр-процессор для обработки сигналов лазерного доплеровского измерителя скорости, содержащий два квадратурных канала измерения, состоящих из последовательно соединенных смесителя, фильтра низких частот разностной частоты и блока дифференцирования, при этом первые входы смесителей объединены вместе и являются входом устройства, а вторые входы подключены соответственно к первому и второму выходам квадратурного генератора частоты, отличающийся тем, что в него введены последовательно соединенные коммутатор и аналого-цифровой преобразователь, четыре устройства выборки и хранения сигнала, выходы которых соединены с входами коммутатора, а первые входы первого и второго устройств выборки и хранения сигнала подключены к выходам соответственно фильтра низких частот разностной частоты и блока дифференцирования первого квадратурного канала, а первые входы третьего и четвертого устройств выборки и хранения - соответственно к выходам фильтра низких частот и блока дифференцирования второго квадратурного канала, микропроцессор мгновенных значений разностной частоты, соединенный с шиной этого микропроцессора интерфейсный блок, первый выход которого соединен со вторыми входами всех устройств выборки и хранения сигнала, второй выход соединен с управляющим входом коммутатора, а третий и четвертый выходы подключены соответственно к входу запуска аналого-цифрового преобразователя и входу записи данных квадратурного генератора частоты, а вход и выход данных интерфейсного блока соединены соответственно с выходом аналого-цифрового преобразователя и с входом данных квадратурного генератора частоты.
| Дюрани Т | |||
| и др | |||
| Лазерные системы в гидродинамических измерениях | |||
| Перевод на русский язык | |||
| - М.: Энергия, 1980 | |||
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 1988 |
|
SU1832942A1 |
| Способ определения прочности смеси | 1972 |
|
SU447597A1 |
| US 5781283, 14.07.1998. | |||

