Изобретение относится к области построения доплеровских ЛИДАРОВ и лазерных доплеровских измерителей скорости (ЛДИС), предназначенных для измерения скорости ветра и выявления турбулентных процессов в атмосфере.
Суть работы доплеровских систем заключается в формировании одного или нескольких зондирующих пучков и приеме рассеянного света от различных объектов, таких, например, как аэрозольные частицы, рассеивающие и отражающие объекты. Практически все подобные оптические системы представляют собой интерферометр различной конфигурации, в которых непременным условием реализации является наличие опорного оптического сигнала. Таким образом, задача измерения доплеровской частоты сводится к построению интерферометра, представляющего собой сложную и дорогостоящую аппаратуру.
Описания таких систем приведены в ряде статей и монографий, например Довиак Р., Зрнич Д. Доплеровские радиолокаторы и метеорологические наблюдения. Ленинград: Гидрометеоиздат, 1988. 512 с., Werner Ch. at all, Wind infrared Doppler lidar instrument, Opt. Eng. V.40, №1, 2001, p.115-125., Adrian A. Dorrington, Rainer Kunnemeyer, and Paul M. Danehy, "Refrence-beam storage for long-range low-coherence pulsed Doppler lidar, "Appl. Opt. vol.40, No.18, 2001, 977-992.), Gordienko V.M. at all, Wind Doppler lidar with 1,5 mkm fiber laser, Laser Phis. Lett. 5, №5, 2008, 390-393., Смалихо И.Н., Рам Ш. Измерения когерентными доплеровскими лидарами параметров самолетных вихрей. Оптика атмосферы и океана, 21, №11, 2008., Василенко Ю.Г., Дубнищев Ю.Н., Соболев B.C., Коронкевич В.П. и др. Лазерные доплеровские измерители скорости. Новосибирск, НАУКА СО АН, 1975, Коронкевич В.П., Соболев B.C. Дубнищев Ю.Н., Лазерная интерферометрия. Новосибирск, НАУКА СО АН, 1984, Ринкевичус Б.С. Лазерная диагностика потоков. М.: издательство МЭИ, 1990. Стр.138-23, а также патентов, например Патент РФ 2338223 «Способ формирования мультиплицированной временной когерентности оптической волны и устройство для его осуществления», МПК G01S 17/88, Патент РФ №2365942 «Способ определения скорости рассеивающего пространственно распределенного объекта и доплеровский низкокогерентный лидар для его осуществления», МПК G01S 17/95, G01S 17/95. Патент №2434247 «Способ формирования сигнала в доплеровских лидарах», МПК G01S 17/88.
Основной недостаток таких схем - необходимость построения оптического интерферометра, получения контрастной картины интерференции, которую трудно сформировать в случае дальней зоны зондирования, сложность самой схемы интерферометра, наличие большого низкочастотного пьедестала, большой уровень низкочастотных шумов, зависимость точности измерений от степени когерентности источника излучения.
Известно техническое решение с использованием интерферометра, представленное в патенте РФ №2365942 «Способ определения скорости рассеивающего пространственно распределенного объекта и доплеровский низкокогерентный лидар для его осуществления», МПК G01S 17/95, опубликован 27.08.2009. Объект зондируют импульсной оптической когерентной волной, сигнальную волну, рассеянную объектом и имеющую доплеровское смещение спектра, и опорную волну затем подвергают внутриволоконному смешению, причем одну из волн подвергают еще и предварительной частотной модуляции, и направляют волны в фотоприемник и полученную частотную характеристику фототока фотоприемника используют для определения компоненты скорости объекта в направлении его зондирования.
Недостатком данного технического решения является невозможность измерений в случае дальней зоны зондирования, а также сложность оптической схемы лидара, так как и в этом случае необходим опорный оптический сигнал и, следовательно, соответствующий интерферометр.
Известно техническое решение, используемое в лазерном радаре, основанном на методе с применением амплитудной модуляцией и без применения интерферометра (Патент CN 102798866 «Laser radar system and compound distance-measuring and speed- measuring method adopting sine-wave amplitude modulation and phase pulse code modulation of same", МПК G01S 17/32, G01S 7/483, опубликован 2012-11-28), выбранный в качестве прототипа. Метод основан на осуществлении модуляции зондирующего луча лазера по интенсивности излучения, приеме рассеянного излучения, детектировании принятого излучения и преобразовании выходного сигнала фотодетектора в два квадратурных сигнала доплеровской частоты. Наличие импульсной модуляции в прототипе вынуждает авторов указанного патента использовать очень сложный алгоритм оценки частоты получаемого сигнала.
Такой подход ограничивает возможности лазерного радара, так как для повышения его разрешающей способности модуляция должна осуществляться на высоких частотах (желательно в гигагерцовом диапазоне), что практически невозможно реализовать для большинства мощных лазеров. Кроме этого отличие состоит в том, что в указанном патенте применяется дополнительная импульсная модуляция излучения для определения дальности до исследуемой области измерений. Далее в указанном патенте доплеровская частота (измеряемая скорость ветра) оценивается с помощью частотного дискриминатора путем обработки сигнала с одного из двух перемножителей, что не позволяет определять направление вектора скорости.
Недостатком известного технического решения является невозможность определения направления ветра, сложный алгоритм оценки частоты сигнала, получаемого от аэрозолей атмосферы или других лоцируемых объектов.
Перед авторами стояла задача разработать способ определения скорости и направления ветра и некогерентный доплеровский лидар для его осуществления, позволяющие определить скорость и направление ветра, не прибегая к построению интерферометра в оптическом диапазоне частот с лазером высокой когерентности.
Поставленная задача решается тем, что в способе определения скорости и направления ветра, включающем использование некогерентного доплеровского лидара, содержащего лазер, передающий телескоп и приемную оптику, модулятор излучения лазера, генератор, фотодетектор, первый и второй перемножители, фазовращатель, первый и второй низкочастотный фильтры, прием рассеянного излучения, детектирование принятого излучения и преобразование выходного сигнала фотодетектора в два квадратурных сигнала доплеровской частоты, некогерентный доплеровский лидар дополнительно снабжают фильтром первой гармоники выходного сигнала фотодетектора, включенным между фотодетектором и входами первого и второго перемножителей, двухканальным аналого-цифровым преобразователем, электрически связанным с первым и вторым низкочастотными фильтрами, а модулятор излучения лазера выполняют осуществляющим модуляцию зондирующего луча лазера непрерывным гармоническим сигналом по амплитуде поля, далее дополнительно фильтруют выходной сигнал фотодетектора, а модуляцию зондирующего луча лазера осуществляют непрерывным гармоническим сигналом по амплитуде поля, доплеровскую частоту определяют по формуле
ΩDn=Т-1Arctg[Im(Zn*Zn+1)/Re(Zn*Zn+1)],
где Zn и Zn+1 - отсчеты мгновенных значений комплексного сигнала с выходов аналого-цифрового преобразователя, Т - известный период дискретизации сигнала по времени, звездочка означает операцию комплексного сопряжения, скорость определяют по формуле
V=ΩDnC/2Ωм,
где C - скорость света, a Ωм - круговая частота модуляции, причем двухканальный аналого-цифровой преобразователь выполнен подключающимся к компьютеру.
Способ реализуется с помощью некогерентного доплеровского лидара, включающего лазер, передающий телескоп, приемную оптику, модулятор излучения лазера, генератор, фотодетектор, первый и второй перемножители, фазовращатель, первый и второй низкочастотные фильтры, который дополнительно содержит фильтр первой гармоники выходного сигнала фотодетектора, включенный между фотодетектором и входами первого и второго перемножителей, двухканальный аналого-цифровой преобразователь, электрически связанный с первым и вторым низкочастотным фильтром, а модулятор излучения лазера выполнен осуществляющим модуляцию зондирующего луча лазера непрерывным гармоническим сигналом по амплитуде поля, причем двухканальный аналого-цифровой преобразователь выполнен подключающимся к компьютеру.
Технический эффект заявляемого технического решения заключается в повышении пространственного разрешения, повышении стабильности и надежности измерений, увеличении дальности зондирования исследуемой зоны, а также в упрощении оптической схемы конструкции, расширении ассортимента устройств данного назначения.
Заявляемый способ определения скорости и направления ветра реализуется с помощью некогерентного доплеровского лидара, устройство которого поясняется блок-схемой, представленной на фиг.1, где 1 - лазер, 2 - модулятор излучения лазера, 3 - передающий телескоп, 4 - приемная оптика, 5 - генератор, 6 - фазовращатель, 7 - фотодетектор, 8 - фильтр первой гармоники, 9 - первый перемножитель, 10 - второй перемножитель, 11 - первый низкочастотный фильтр, 12 - второй низкочастотный фильтр, 13 - двухканальный аналого-цифровой преобразователь, 14 - компьютер, 15 - kj направление вектора зондирующего луча, 16 - ks направление вектора рассеянного света, 17 - V вектор скорости.
На фиг.2 представлены: Спектры модулирующей функции (слева) и напряженности модулированного оптического поля (справа) (а), Спектр отраженного (рассеянного) поля (б), Спектр сигнала на выходе фотодетектора (в), Спектр сигнала на выходе перемножителя (г).
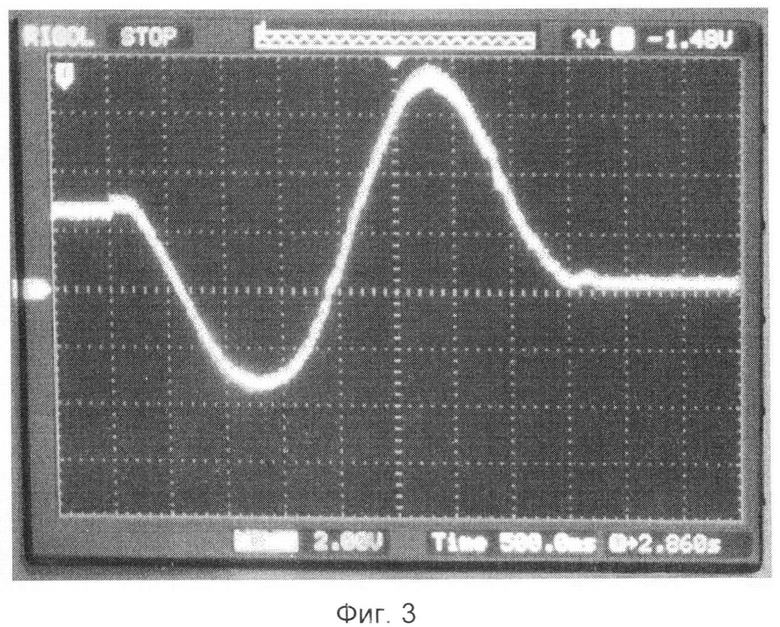
На Фиг.3 представлена осциллограмма сигнала, полученного с помощью заявляемого некогерентного доплеровского лидара при движении отражающего объекта в исследуемой зоне.
Заявляемый способ определения скорости и направления ветра, основанный на использовании некогерентного доплеровского лидара, работает следующим образом. Лазер 1 генерирует лазерное излучение, далее модулятор излучения лазера 2, питаемый генератором 5, осуществляет модуляцию зондирующего луча лазера непрерывным гармоническим сигналом по амплитуде поля. С помощью передающего телескопа 3 модулированное излучение лазера направляется в исследуемую зону пространства, содержащую рассеивающие аэрозоли или другие движущиеся объекты. Отраженный или рассеянный ими свет улавливается приемной оптикой 4 и направляется ею на фотодетектор 7. На выходе фотодетектора 7 появляется сигнал частоты модуляции плюс или минус доплеровская частота, пропорциональная скорости движения объекта в исследуемой зоне. Фильтр 8, включенный между фотодетектором и входами первого и второго перемножителей 9, 10, выделяет первую гармонику этого сигнала. Далее ее частоту сравнивают с частотой модулирующего сигнала путем перемножения каждого их них на квадратурные сигналы, создаваемые генератором 5 и фазовращателем 6, путем их перемножения в радиочастотных перемножителях 9, 10. Таким образом, после фильтрации результатов перемножения с помощью низкочастотных фильтров 11 и 12 на их выходе появляется комплексный сигнал подлежащей измерению доплеровской (разностной) частоты в виде двух квадратурных компонент. Двухканальный аналого-цифровой преобразователь 13, выполненный подключающимся к компьютеру 14, преобразует комплексный сигнал в цифровую форму. Далее доплеровскую частоту определяют по формуле
ΩDn=Т-1Arctg[Im(Zn*Zn+1)/Re(Zn*Zn+1)],
где Zn и Zn+1 - отсчеты мгновенных значений комплексного сигнала с выходов аналого-цифрового преобразователя, Т - известный период дискретизации сигнала по времени, звездочка означает операцию комплексного сопряжения, а скорость объекта в исследуемой зоне определяют по формуле
V=ΩDnC/2Ωм,
где С - скорость света, a Ωм - круговая частота модуляции.
Рассмотрим далее теоретическое обоснование предложенного способа определения скорости и направления ветра. В соответствии с изложенным выше зондирующий луч должен представлять собой модулированное излучение лазера, по амплитуде его поля непрерывным гармоническим сигналом. Тогда модулирующая функция должна иметь следующий вид

где m - индекс модуляции, а омега ее частота.
В этом случае поле зондирующего луча представляется следующим образом:

Если m=1, то оно примет вид

Как следует из этого выражения, спектр сигнала состоит из трех гармоник, как показано на Фиг.2а. Доплеровский сдвиг частоты каждой гармоники в нерелятивистском случае для зондирующего излучения с длиной волны λ выражается известным соотношением

где V - вектор скорости 17, ks - направление вектора рассеянного света 16, ki - направление вектора зондирующего луча 15, k - разностный вектор, равный (ks-ki). С учетом того, что модуль волнового вектора |ki|=|ks|=2π/λ доплеровскую частоту можно представить, как

где ω - частота зондирующего излучения, равная 2πС/λ, φ - угол между вектором скорости и вектором k, λ - длина волны зондирующего поля, С - скорость света, а коэффициент K равен

Таким образом, для любого значения частоты гармоники зондирующего поля выражение для доплеровской частоты будет иметь вид

Учитывая последнее выражение, можно записать значения доплеровских сдвигов частоты для каждой спектральной составляющей амплитудно-модулированного колебания в виде:



С учетом этого выражения для частоты каждой гармоники рассеянного излучения примет вид



Спектр этого сигнала представлен на Фиг.2б. Разность между новой центральной частотой и новыми боковыми частотами составляет теперь

Из этого соотношения следует, что боковые спектральные составляющие приобретают сдвиг по частоте относительно несущей частоты на одинаковую величину, а это означает, что поле рассеянного света остается строго амплитудно-модулированным колебанием, но теперь его частота модуляции будет смещена на новую доплеровскую частоту, также пропорциональную скорости

где Λ=2πС/Ω длина волны, соответствующая частоте модуляции.
При этом величина доплеровского сдвига не зависит от несущей частоты ω и определяется только частотой модуляции Ω.
Теперь определим сигнал на выходе фотодетектора. Для этого, как и ранее найдем выражение для рассеянного поля. Исходя из выражений (3) и (11)-(13), получим выражения для каждой гармоники рассеянного поля



Сигнал на выходе фотодетектора, с учетом того, что фотодетектор реагирует на квадрат модуля суммарного поля, получим в виде

Из этого выражения следует, что выходной сигнал фотодетектора содержит, во-первых, компоненты, колеблющиеся с новой частотой, смещенной на доплеровскую частоту, пропорциональную измеряемой скорости, а, во - вторых, не только первую, но и вторую гармонику этой частоты. Соответствующий спектр сигнала (19) представлен на Фиг.2в.
Далее предполагается использовать только первую гармонику этого сигнала, так как ее амплитуда в четыре раза превышает амплитуду второй. Операция выделения выполняется узкополосным фильтром, включенным на выходе фотоприемника. Сигнал после фильтра приобретает вид

Знаки плюс или минус в этом выражении определяются направлением движения ветра или другого лоцируемого объекта.
Дальнейшая обработка получаемого сигнала заключается в переносе его спектра в область нулевых частот путем умножения на квадратурные сигналы модулирующей функции, низкочастотной фильтрации результата и получении двух компонент комплексного сигнала новой доплеровской частоты ΩD=KΩ

Спектр этих сигналов представлен на Фиг.2г. Оценки этой новой доплеровской частоты определяют по формуле

где Zn и Zn+1 - отсчеты мгновенных значений комплексного сигнала с выходов аналого-цифрового преобразователя, Т - известный период дискретизации сигнала по времени, а звездочка означает операцию комплексного сопряжения.
Знак этой частоты определяет направление ветра. Если этот знак плюс, то вектор скорости направлен к лазеру, а если минус, то от лазера. После того, как измерена доплеровская частота, скорость ветра определяется по формуле
V=ΩDnC/2Ωм,
где C - скорость света, a Ωм - круговая частота модуляции.
В отличие от обычных доплеровских систем здесь скорость ветра определяется через частоту модуляции и соответствующую ей частоту доплеровского смещения, не через несущую частоту лазера и соответствующую ей доплеровскую частоту.
Как следует из вышеизложенного анализа, предложенная конструкция некогерентного доплеровского лидара не содержит интерферометра оптических полей, что позволяет использовать любой источник света для формирования зондирующего луча. Это обстоятельство является большим преимуществом предложенной конструкции некогерентного доплеровского лидара, так как не требуется лазер с высокой когерентностью.
В качестве примера оценим значение доплеровской частоты для случая, когда скорость исследуемого объекта составляет 100 м/с, частота модуляции Ω=2π109 Гц, а угол φ=2π.

Экспериментальное подтверждение работоспособности заявляемого некогерентного доплеровского лидара. Эксперимент был выполнен с помощью действующего макета заявляемого некогерентного доплеровского лидара. Осциллограмма сигнала с его выхода, полученная при перемещении рассевающего объекта со скоростью 1 м/с, представлена на Фиг.3. Значение его частоты соответствует доплеровской частоте, которая определяется формулой (15), что подтверждает правильность предлагаемого способа оценки скорости ветра или других движущихся объектов и работоспособность предлагаемого лидара.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2830211C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2003 |
|
RU2247395C1 |
| СПОСОБ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ КАЧЕСТВА РАСПЫЛИВАНИЯ ТОПЛИВА ФОРСУНКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2016217C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376612C1 |
| ЛИДАРНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2744932C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1993 |
|
RU2106658C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442186C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ И РАЗМЕРОВ ЧАСТИЦ В ПОТОКЕ | 1992 |
|
RU2044267C1 |
| Устройство для мониторинга виброакустических характеристик протяженных объектов | 2024 |
|
RU2837066C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА ДИАЛИЗАТА | 2010 |
|
RU2445606C1 |

Изобретение относится к области построения доплеровских лидаров и лазерных доплеровских измерителей скорости, предназначенных для измерения скорости ветра и выявления турбулентных процессов в атмосфере. Способ заключается в модуляции зондирующего луча с помощью гармонической функции, детектировании отраженного или рассеянного света фотодетектором и выделении основной гармоники продетектированного сигнала, которую сравнивают с модулирующим сигналом путем их перемножения в радиочастотном перемножителе. Формируют комплексный сигнал разностной (новой доплеровской) частоты, пропорциональной скорости, которая подлежит измерению. Изобретение позволяет повысить пространственное разрешение, стабильность и надежность измерений, увеличить дальность зондирования исследуемой зоны, а также упростить оптическую схему. 2 н. и 2 з.п. ф-лы, 3 ил.
1. Способ определения скорости и направления ветра, включающий использование некогерентного доплеровского лидара, содержащего лазер, передающий телескоп и приемную оптику, модулятор излучения лазера, генератор, фотодетектор, первый и второй перемножители, фазовращатель, первый и второй низкочастотный фильтры, прием рассеянного излучения, детектирование принятого излучения и преобразование выходного сигнала фотодетектора в два квадратурных сигнала доплеровской частоты, отличающийся тем, что некогерентный доплеровский лидар дополнительно снабжают фильтром первой гармоники выходного сигнала фотодетектора, включенным между фотодетектором и входами первого и второго перемножителей, двухканальным аналого-цифровым преобразователем, электрически связанным с первым и вторым низкочастотными фильтрами, а модулятор излучения лазера выполняют осуществляющим модуляцию зондирующего луча лазера непрерывным гармоническим сигналом по амплитуде поля, дополнительно фильтруют выходной сигнал фотодетектора, а доплеровскую частоту определяют по формуле
ΩDn=Т-1Arctg[Im(Zn*Zn+1)/Re(Zn*Zn+1)],
где Zn и Zn+1 - отсчеты мгновенных значений комплексного сигнала с выходов аналого-цифрового преобразователя, Т - известный период дискретизации сигнала по времени, звездочка означает операцию комплексного сопряжения, скорость определяют по формуле
V=ΩDnC/2Ωм,
где C - скорость света, a Ωм - круговая частота модуляции.
2. Способ по п.1, отличающийся тем, что двухканальный аналого-цифровой преобразователь выполнен подключающимся к компьютеру.
3. Некогерентный доплеровский лидар, включающий лазер, передающий телескоп, приемную оптику, модулятор излучения лазера, генератор, фотодетектор, первый и второй перемножители, фазовращатель, первый и второй низкочастотные фильтры, отличающийся тем, что дополнительно содержит фильтр первой гармоники выходного сигнала фотодетектора, включенный между фотодетектором и входами первого и второго перемножителей, двухканальный аналого-цифровой преобразователь, электрически связанный с первым и вторым низкочастотными фильтрами, а модулятор излучения лазера выполнен осуществляющим модуляцию зондирующего луча лазера непрерывным гармоническим сигналом по амплитуде поля.
4. Некогерентный доплеровский лидар по п.3, отличающийся тем, что двухканальный аналого-цифровой преобразователь выполнен подключающимся к компьютеру.
| CN 102798866 A, 28.11.2012 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАССЕИВАЮЩЕГО ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОГО ОБЪЕКТА И ДОПЛЕРОВСКИЙ НИЗКОКОГЕРЕНТНЫЙ ЛИДАР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365942C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕРФЕРЕНЦИОННОГО СИГНАЛА В ДОПЛЕРОВСКИХ ЛИДАРАХ | 2010 |
|
RU2434247C1 |
| Проектор для контроля и регулировки спускового регулятора часового механизма | 1958 |
|
SU121379A1 |
| RU 2011100397 A, 20.07.2012 | |||
| ЛИДАР ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ АТМОСФЕРЫ (ВАРИАНТЫ) | 2006 |
|
RU2335786C1 |
| УСТРОЙСТВО ПЕРИОДИЧЕСКОГО ПЕРЕМЕЩЕНИЯ | 2003 |
|
RU2254975C1 |
| US 6181412 B2, 30.01.2001 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

