Изобретение относится к области получения энергии и предназначено для преобразования потенциальной энергии постоянного магнита в механическую и другие виды энергии и может быть использовано в паре с электрогенератором для получения электрической энергии.
Известно устройство для перемещения объектов, преимущественно игровых элементов игрушек (ЕР 0627248, МКИ 7 A 63 H 33/26, 1994).
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для перемещения объектов игрушек, содержащее корпус из немагнитного материала, два постоянных магнита, размещенных внутри корпуса на противоположных его концах и перемещаемый элемент - постоянный магнит - ползун, установленный в средней части корпуса между постоянными шаровыми магнитами (Патент РФ 2124379, МКИ 7 A 63 H 33/26, 1998).
Недостатком известного устройства является невозможность преобразовывать потенциальную энергию постоянного магнита в механическую энергию и в другие виды энергии.
Задачей предлагаемого изобретения является разработка двигателя, позволяющего преобразовывать потенциальную энергию постоянного магнита в механическую и в другие виды энергии.
В результате использования предлагаемого изобретения появляется возможность преобразовывания потенциальной энергии постоянного магнита в механическую и в другие виды энергии.
Вышеуказанный технический результат достигается тем, что двигатель, предназначенный для преобразования потенциальной энергии постоянного магнита во вращательное движение коленчатого вала, содержит корпус из немагнитного материала, два постоянных магнита, выполненных в виде шаров, каждый из которых закреплен на валу, снабженным приводом для его поворота. Эти два постоянных магнита размещены внутри корпуса на противоположных его концах. Двигатель содержит перемещаемый третий магнит, установленный в средней части корпуса, между двумя вращающимися магнитами, на направляющих с возможностью возвратно-поступательного перемещения, от одного вращающегося магнита к другому. Третий перемещающийся магнит-ползун выполнен в виде куба с расположенными по бокам сферическими впадинами, для возможного вращения вращающихся магнитов в непосредственной близости к ним. Он также выполняет функцию ползуна, к нему в средней части при помощи пальца прикреплен кривошипно-шатунный механизм. Производя возвратно-поступательное движение между двумя вращающимися магнитами третий магнит-ползун с помощью кривошипно-шатунного механизма приводит коленчатый вал во вращательное движение.
Сущность предлагаемого изобретения поясняется фиг. 1, 2, 3.
На фиг. 1 представлена общая схема двигателя с постоянными магнитами в продольном разрезе, вид спереди.
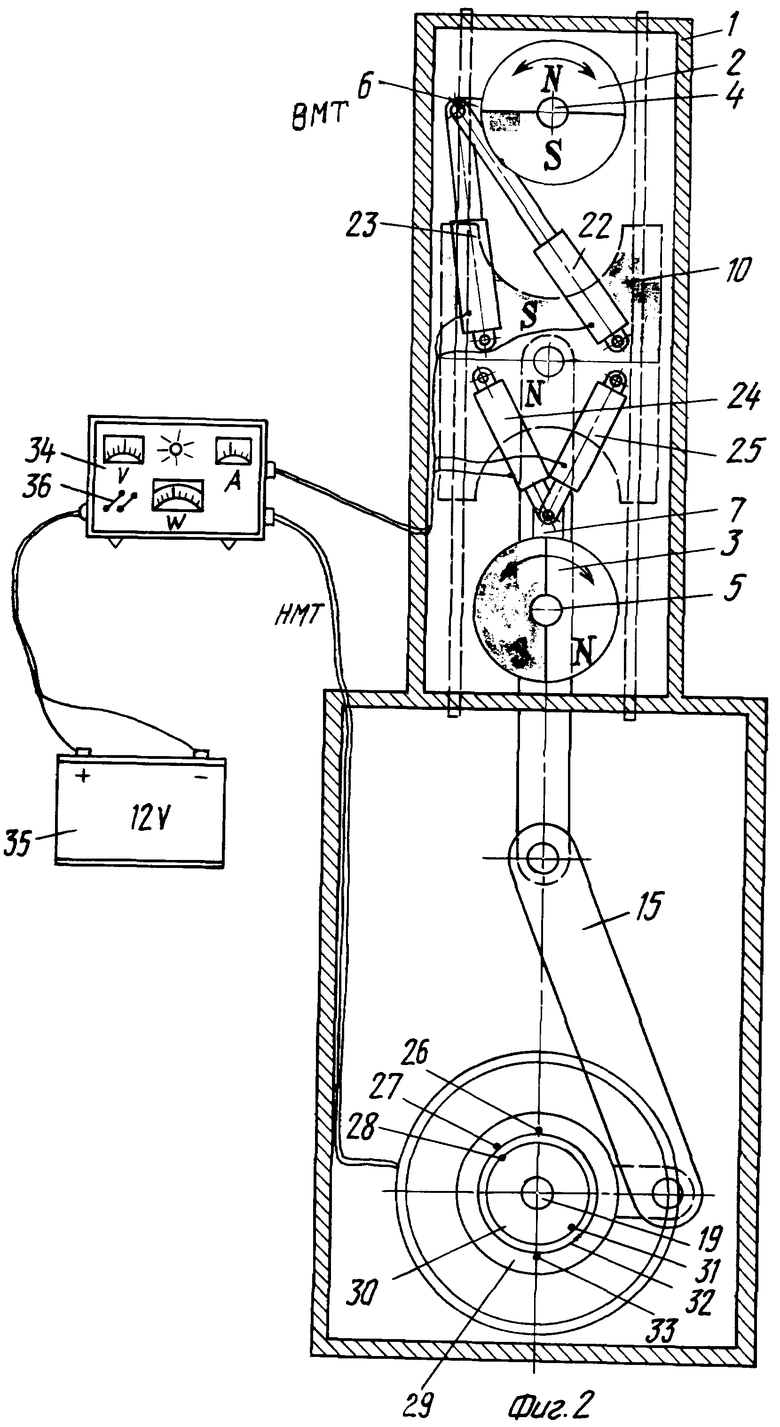
На фиг. 2 представлен вариант выполнения управления двигателя автоматически, вид с обратной стороны.
На фиг. 3 представлена диаграмма распределения сил, действующих на постоянные магниты в двигателе.
Двигатель с постоянными магнитами содержит корпус из немагнитного материала, например, алюминия 1, внутри корпуса 1 установлены постоянные магниты 2 и 3, выполненные в виде шаров и установленные на валах 4 и 5 с возможностью вращения от приводов 6 и 7, в корпусе установлены направляющие 8 и 9, выполненные из титана в виде стержней, концы которых закреплены на боковых стенках корпуса 1. На направляющих 8 и 9 установлен между двумя вращающимися магнитами 2 и 3 ползун, перемещающийся постоянный магнит 10. Перемещающийся ползун 10 выполнен в виде куба, полюса которого обращены к полюсам вращающихся магнитов 2 и 3. Стороны-полюса ползуна 10 имеют сферические выемки 11 и 12 для свободного вращения вращающихся магнитов 2 и 3 в тот же момент, когда ползун 10 подходит вплотную к одному из них. К средней части ползуна 10 при помощи пальца 13 крепится толкатель 14, который в своем поступательном движении удерживается направляющей 17 и соединен через подшипник шатуна 18 с шатуном 15, который в свою очередь соединен с подшипником шейки 16 коленчатого вала 20. Таким образом осуществляется связь между ползуном 10 и коленчатым валом 21.
Все вращающиеся элементы данного двигателя выполнены на шариковых подшипниках закрытого типа, что и осуществляет смазку двигателя. На коленвалу расположен блок с подвижными контактами 28 и блок 31 с неподвижными контактами 26, 27 и 32 и 33 для управления соленоидами 22, 23, 24, 25.
В неработающем состоянии двигателя соленоиды управления 22, 23, 24 и 25 вращающимися магнитами 2 и 3 отключены и вращающиеся магниты 2 и 3 установлены к ползуну "нейтральными" сторонами, т.е. S/N соответственно, не оказывая на ползун 10 никакого воздействия, и все находится в покое.
Двигатель на постоянных магнитах работает следующим образом.
Включив тумблер 36 на пульте управления двигателем 34, мы подаем напряжение от независимого источника (аккумулятора) на пульт управления двигателя 34. Автоматика подает команду на соленоиды 22, 23, 24 и 25 управления поворотом вращающихся магнитов 2 и 3 в зависимости от положения ползуна 10 и коленчатого вала 21. Допустим ползун 10 движется вверх к ВМТ, тогда соленоид 22 включен, а соленоид 23 отключен, следовательно вращающийся магнит 2 повернут стороной-полюсом N к стороне S магнита ползуна 10. Разность полюсов образует силу притяжения. Одновременно подаются команда на включение соленоида 25 и отключения соленоида 24, следовательно вращающийся магнит 3 поворачивается стороной-полюсом N к стороне-полюсу N магнита ползуна 10, что создает отталкивающую силу. Под действием этих двух сил притягивающей и отталкивающей поршень движется к верхней мертвой точке (ВМТ) увлекая за собой кривошипно-шатунный механизм и раскручивая коленвал. Не доходя 45 по повороту коленвала до ВМТ замыкается подвижный контакт 28 с неподвижным контактом 27. Сигнал поступает в блок управления двигателя 34, а затем подается команда на отключения соленоида 22, что приводит к повороту вращающегося магнита 2 и он становится нейтральной стороной S/N к стороне-полюсу S ползуна 10, действие притягивающей силы прекращается, но продолжает действовать отталкивающая сила магнита 3 и ползун 10 продолжает двигаться. Как только ползун 10 подходит к ВМТ, замыкается подвижной контакт 28 с неподвижным контактом 26, сигнал через блок управления 34 попадает на соленоид 22 и он разворачивает вращающийся магнит 2 стороной-полюсом S к стороне-полюсу S ползуна 10, одноименные полюса отталкиваются, следовательно возникает отталкивающая сила. Одновременно с этим замыкаются подвижной контакт 31 с неподвижным 33, идет команда через блок управления 34 на отключение соленоида 25 и включение соленоида 24, вращающийся магнит 3 поворачивается стороной-полюсом S к стороне-полюсу N ползуна 10. Разноименные полюса образуют притягивающую силу. Под воздействием двух сил - отталкивающей и притягивающей - ползун 10 устремляется от ВМТ к нижней мертвой точке (НМТ), раскручивая коленвал. Не доходя ползуна 10 до НМТ 45o по повороту коленвала, замыкается подвижный контакт 28 с неподвижным контактом 32, сигнал поступает на блок управления 34, и отключается соленоид 24, вращающийся магнит 3 разворачивается стороной-полюсом. S/N к стороне-полюсу N ползуна 10, что приводит к прекращению действия силы притяжения, но продолжает действовать сила отталкивания и ползун 10 продолжает двигаться к НТМ. При подходе ползуна 10 к НМТ замыкается подвижной контакт 28 с неподвижным контактом 33, сигнал через блок управления 34 поступает на соленоид 24, который разворачивает вращающийся магнит 3 стороной-полюсом N к стороне-полюсу N ползуна 10, возникает отталкивающая сила. Одновременно подвижной контакт 31 замыкает с неподвижным контактом 26, сигнал через блок управления 34 поступает на отключение соленоида 22 и включение соленоида 23. Вращающийся магнит 2 разворачивается стороной-полюсом N к стороне-полюсу S ползуна 10, разноименные полюса образуют притягивающую силу. Таким образом, две силы - отталкивающая и притягивающая - заставляют двигаться от НМТ к ВМТ, а следовательно и вращается коленвал. Цикл замкнулся. Так повторяется до бесконечности.
В случае отключения двигателя необходимо выключить тумблер 36 на блоке управления 34, на соленоиды подается команда на их отключение и они устанавливают вращающиеся магниты 2 и 3 в нейтральное положение по отношению к ползуну 10, на него перестают действовать силы и двигатель останавливается.
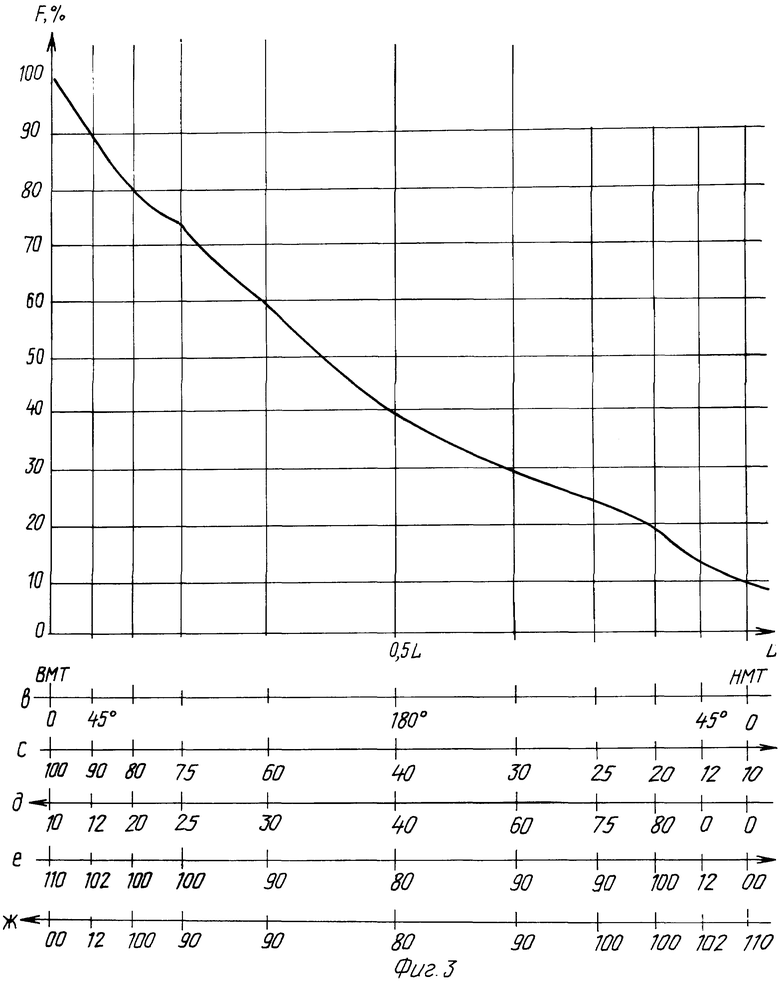
Рассмотрим диаграмму сил, действующих на перемещающийся магнит-ползун (фиг. 3).
При движении ползуна от НТМ к ВМТ и наоборот на него действуют постоянно две силы - сила притяжения, куда он двигается и сила отталкивания, откуда он движется и только в одном месте, когда поршень подходит к мертвой точке смены движения за 45o, прекращает действовать сила притяжения, но продолжает действовать сила отталкивания, это связано с тем, чтобы не терять лишнюю энергию на поворот магнита, если мы будем поворачивать магнит в непосредственной близости с поршнем, то потеряем мощность двигателя ≈ 60%.
Поворачивая магнит заранее, за 45o по повороту коленчатого вала мы теряем всего 10% мощности.
На фиг. 3 (a) из графика силы взаимодействия двух магнитов в зависимости от расстояния эта зависимость параболическая при непосредственной близости двух магнитов сила взаимодействия (неважно притягивающая или отталкивающая) примем за 100%, а на определенном расстоянии L эта сила будет 10%. Данные параметры определяли практически на своей модели, практически определили расстояние L это расстояние приняли за величину хода ползуна и это расстояние стало базовым при дальнейшей разработке модели.
На фиг. 3 (в) показано ход ползуна, расстояние L и разбивка по градусам поворота коленчатого вала.
На фиг. 3 (c) показаны силы отталкивания в %, действующие на поршень, когда он движется к НМТ.
На фиг. 3 (д) показаны силы притяжения в %, действующие на поршень, когда он движется к НМТ.
На фиг. 3 (e) показана сумма сил, действующих на поршень, когда он движется к НМТ.
На фиг. 3 (ж) показана сумма сил, действующих на ползун, когда он движется к ВМТ.
По данным графикам мы можем определить величину сил, действующих на поршень в любой фазе его движения.
Коэффициент полезной мощности данного двигателя, если брать за основу постоянные сверхмощные магниты, примерно 78,5%.
В нашем случае были использованы магниты силой притяжения 1 г на 1 кг.
Использование: для преобразования потенциальной энергии постоянного магнита в механическую и другие виды энергии, например, в паре с электрогенератором для получения электрической энергии. Технический результат заключается в преобразовании потенциальной энергии постоянного магнита в механическую. Двигатель содержит корпус из немагнитного материала, два постоянных магнита, выполненных в виде шаров, каждый из которых закреплен на валу, снабженном приводом для его поворота. Постоянные магниты размещены внутри корпуса на противоположных его концах. Двигатель содержит магнит-ползун, установленный в средней части корпуса, между двумя вращающимися магнитами, на направляющих с возможностью возвратно-поступательного перемещения, от одного вращающегося магнита к другому. Магнит-ползун выполнен в виде куба с расположенными по бокам сферическими впадинами. К нему в средней части при помощи пальца прикреплен кривошипно-шатунный механизм. Магнит-ползун с помощью кривошипно-шатунного механизма приводит коленчатый вал во вращательное движение. 3 ил.
Двигатель на постоянных магнитах, содержащий корпус из немагнитного материала, два постоянных магнита в виде шаров, каждый из которых закреплен на валу с возможностью вращения от привода, постоянные магниты в виде шаров размещены внутри корпуса из немагнитного материала в противоположных его концах, постоянный магнит-ползун установлен в средней части корпуса из немагнитного материала на направляющих с возможностью возвратно-поступательного перемещения от одного постоянного магнита в виде шара к другому, отличающийся тем, что постоянный магнит-ползун выполнен в виде куба и по бокам - со сферическими впадинами-полюсами N и S для вращения постоянных магнитов в виде шаров с полюсами N и S, к средней части постоянного магнита-ползуна при помощи пальца прикреплен кривошипно-шатунный механизм, приводящий во вращение коленчатый вал, на котором размещен блок с подвижными контактами с возможностью их замыкания с неподвижными контактами при подходе постоянного магнита-ползуна к одной мертвой точке для передачи сигнала на блок управления соленоидами приводов постоянных магнитов в виде шаров в зависимости от положения постоянного магнита-ползуна и коленчатого вала для такого поворота постоянных магнитов в виде шара, чтобы постоянный магнит-ползун устремлялся к другой мертвой точке.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ИГРОВЫХ ЭЛЕМЕНТОВ ИГРУШЕК | 1997 |
|
RU2124379C1 |
| Горный компас | 0 |
|
SU81A1 |
| WO 00/27015 A1, 11.05.2000 | |||
| Пневмопривод прерывистого вращательного движения | 1981 |
|
SU992852A1 |
| US 4207773 A, 17.06.1980 | |||
| US 4507579 A, 26.06.1985 | |||
| Кресло для разработки подвижности в суставах нижних конечностей | 1988 |
|
SU1600770A1 |
| ПРЕСС-ФОРМА, ВЫПОЛНЕННАЯ В ВИДЕ ПОДДОНА | 2016 |
|
RU2726133C2 |
| DE 3941847 A1, 20.06.1991 | |||
| DE 3409182 A1, 19.09.1985 | |||
| DE 3301547 A1, 19.07.1984. | |||

