Изобретение относится к области рыбоводства и может быть использовано для выращивания и хранения различных морепродуктов в естественной среде обитания.
Известна платформа аналогичного назначения, содержащая садок-ферму в виде сетчатого контейнера, механизм заглубления и подъема садка-фермы в виде сферы с принудительно изменяемой плавучестью и якорь [1].
Известна платформа для выращивания и хранения морепродуктов [2], содержащая садок-ферму в виде сетчатого контейнера положительной плавучести, механизм заглубления и подъема садка-фермы, включающий в себя лебедку, кинематически связанную с кабель-тросом, и якорь, закрепленный на кабель-трос, а также устройство ограничения полезного объема садка-фермы и выносной якорь.
Данная платформа принята за прототип.
Недостатками аналога и прототипа являются:
- большая строительная высота садка-фермы, по форме приближающаяся к сфере. Это не позволяет использовать платформу на водоемах с малыми глубинами (в реках, озерах, прудах):
- заиливание якоря при долговременной эксплуатации платформы, затрудняющее всплытие садка-фермы.
Садок-ферма в аналоге и прототипе не может зависать на различных глубинах водоема.
Известные платформы имеют сложное управление ее работой и, как следствие этого, ненадежность ее работы. Например, при нарушении герметичности заполняемых водой баков платформа может спонтанно погрузиться на дно.
Наличие надводных элементов в известных платформах может быть причиной их повреждения при столкновении с надводными судами.
Техническим результатом, получаемым от внедрения изобретения, является устранение перечисленных выше недостатков, т.е. усовершенствование конструкции и уменьшение общей стоимости платформы за счет более технологичной формы садка-фермы, отсутствия элементов конструкции на поверхности воды при эксплуатации платформы, а также малой строительной высоты и наличия более дешевой и эффективной системы заглубления и подъема садка-фермы.
Данный технический результат получают за счет того, что в известной платформе для выращивания и хранения морепродуктов, содержащей садок-ферму в виде сетчатого контейнера положительной плавучести, механизм заглубления и подъема садка-фермы, включающий в себя лебедку, кинематически связанную с кабель-тросом и якорь, закрепленный на кабель-тросе, а также устройство ограничения полезного объема садка-фермы и второй якорь, механизм заглубления и подъема садка-фермы содержит вторую аналогичную лебедку, кинематически связанную со вторым кабель-тросом, на котором установлен второй якорь; при этом обе лебедки закреплены на противоположных сторонах садка-фермы с возможностью вращения относительно горизонтальной оси и выполнены в виде жестко связанных герметичного корпуса и намоточного барабана, закрепленных соосно на двух полуосях, установленных на садке-форме, причем внутри каждого корпуса закреплен реверсивный электропривод с редуктором, имеющем самотормозящую передачу, на ведомом валу редуктора, соосного полуосям, установлен дебаланс, при этом каждая из лебедок выполнена сбалансированной относительно полуосей.
В частном случае платформа может содержать дополнительные садки-фермы нейтральной плавучести, механически связанные с первым садком-фермой.
Каждый садок-ферма выполнен остойчивым в виде сетчатого контейнера-параллелепипеда прямоугольной формы, а ограничитель полезного объема - в виде перегородки, установленной на подвижной каретке.
Каждая из лебедок дополнительно содержит скобу, шарнирно установленную на полуосях, на вершине которой шарнирно закреплен клюз для ориентации кабель-троса. При этом оси клюзов лебедок и центр тяжести садка-фермы расположены в вертикальной плоскости.
Герметичный корпус в данной конструкции платформы может быть выполнен в виде маслозаполненного или сухого корпуса, а дебаланс - в виде груза, установленного на одном конце штанги, второй конец которой закреплен на ведомом валу редуктора соосного полуосям лебедки.
Самотормозящая передача редуктора может быть выполнена червячной.
Намоточный барабан лебедки может содержать реборду, установленную напротив стенки герметичного корпуса, выполняющей также функции второй реборды.
Платформа может содержать ограничители своего перемещения, установленные на кабель-тросах.
Полуоси лебедок установлены на садке-ферме с помощью кронштейнов.
Платформа может содержать гермоввод, расположенный на конце кабель-троса и герметично закрепленный на поверхности корпуса лебедки.
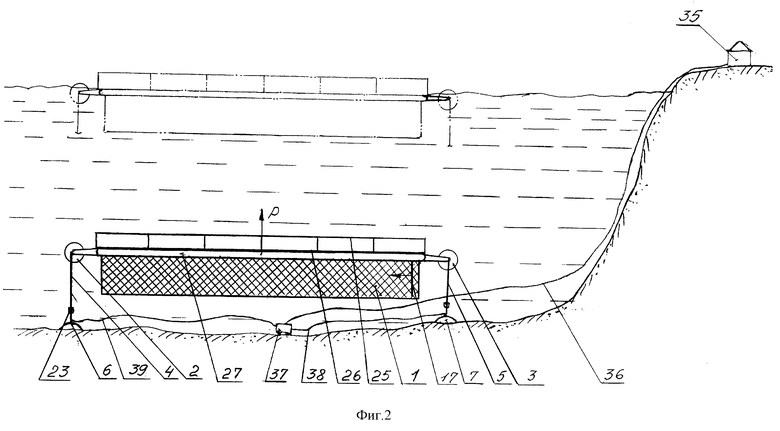
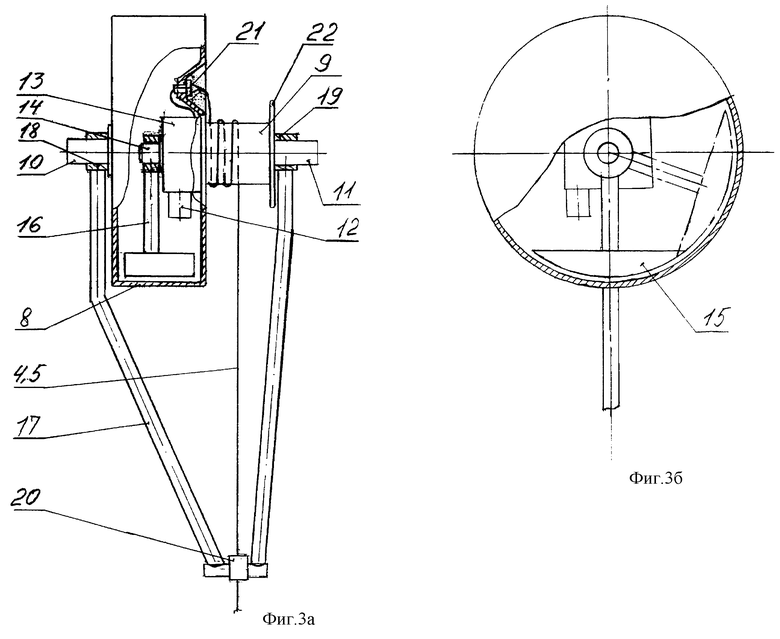
Изобретение поясняется чертежом, на фиг. 1 которого представлен общий вид платформы, управляемой с плавсредства по кабелю через герметичный разъем, поднятый на поверхность со дна акватории; на фиг. 2 - платформа, управляемая по кабель-тросу с берега; на фиг. 3а и 3б - конструкция лебедки; на фиг. 4 - платформа с дополнительными садками-фермами нейтральной плавучести с автономными источниками питания и устройствами управления лебедкой по гидроакустическому каналу.
Платформа для выращивания и хранения морепродуктов содержит (фиг. 1, 2) остойчивый садок-ферму 1 в виде сетчатого контейнера-параллелепипеда прямоугольной формы положительной плавучести, а также механизм заглубления и подъема садка-фермы 1, включающий в себя две лебедки 2 и 3, кинематически связанные соответственно с кабель-тросами 4 и 5, закрепленные к якорям 6 и 7.
Лебедки 2, 3 закреплены на противоположных сторонах сетчатого контейнера 1 с возможностью вращения относительно горизонтальной оси и выполнены в виде (фиг. 3) жестко связанных герметичного корпуса 8 и намоточного барабана 9, закрепленных соосно на двух полуосях 10, 11, установленных в подшипниках скольжения на садке-ферме 1 с помощью кронштейнов (на чертеже не показаны).
Внутри корпуса 8 каждой лебедки закреплен электродвигатель 12 с редуктором 13, имеющем самотормозящую червячную передачу (на чертеже не показана).
На ведомом валу 14 редуктора 13 установлен дебаланс в виде груза 15, установленного на штанге 16.
Лебедки 2, 3 (фиг. 1, 2) выполнены сбалансированными относительно полуосей 10, 11 (фиг. 3) (кроме дебаланса).
Каждая из лебедок (фиг. 3) имеет скобу 17, втулки 18, 19 которой шарнирно установлены на полуосях 10, 11. На вершине скобы 17 шарнирно закреплен клюз 20.
Причем оси клюзов обоих лебедок 2, 3, середины намоточных барабанов и центр тяжести садка-фермы расположены в вертикальной плоскости.
Герметичный корпус 8 в данной конструкции лебедки может быть выполнен маслозаполненным или сухим и содержать гермоввод 21 для кабель-троса 5.
Намоточный барабан 9 лебедки содержит реборду 22, установленную напротив стенки герметичного корпуса 8, выполняющей также функции второй реборды.
Платформа также может содержать ограничители ее вертикального перемещения 23, 24, выполненные в виде горизонтальной площадки, закрепленной на кабель-тросе.
Для удобства эксплуатации платформа, как и в прототипе, содержит леер 25 и трап 26.
Садок-ферма 1 и механизм заглубления и подъема платформы крепится на силовом каркасе 27.
Платформа может быть выполнена с возможностью управления по поднимаемому со дна заглубленного кабеля в открытом море (фиг. 1) и с возможностью управления с берега (фиг. 2). В первом варианте в состав платформы входит буй 28, закрепленный через автономный гидроакустический расцепитель 29 якорем 30 на морском дне, как показано на чертеже (фиг. 1). Электрическая связь с механизмом заглубления, подъема и остановки садка-фермы платформы осуществляется через герметичный разъем 31, кабель-трос 32, муфту 33, кабель-трос 34 и кабель-тросы 4, 5 и гермоввод 21. Во втором (береговом) варианте выполнения платформы управление заглублением, подъемом и остановкой ведется с пульта 35 через кабель-трос 36, муфту 37, кабель-тросы 38, 39, 4, 5 через гермоввод 21.
Платформа может также включать в себя дополнительные аналогичные садки-фермы 40, 41 (фиг. 4) нейтральной плавучести, установленные симметрично относительно основного садка-фермы 1.
Платформа для выращивания и хранения морепродуктов работает следующим образом.
В исходном положении после сборки платформы, поставленной на якоря 6, 7 в задонной области натурного водоема, контейнер 1 садка-фермы заполняется мальками морепродуктов. При этом платформа находится на плаву, а ее трап 26 и леер 25 - над водой (фиг. 1, 2).
Для погружения платформы необходимо обеспечить намотку кабель-тросов 4, 5 на барабаны 9 (фиг. 3) вращением лебедок 2, 3. Для вращения лебедок 2, 3 на электродвигатели 12 подается электроэнергия, приводящая к вращению ведомых валов редукторов 13.
В режиме погружения платформы ведомые валы редукторов 13, вращаясь, отклоняют дебалансы 15, 16 против часовой стрелки (фиг. 3, вид A) до равенства моментов, создаваемых силой, действующей по касательной к барабану 9 через кабель-тросы 4,5 относительно осей лебедок с одной стороны и дебалансами 15, 16 под действием гравитации относительно осей лебедок - с другой стороны. При дальнейшем вращении ведомых валов против часовой стрелки возрастающие моменты дебалансов 15, 16 начнут вращать лебедки, т.к. уравновешивающие моменты, создаваемые натянутыми кабель-тросами 4, 5 будут оставаться постоянными, поскольку натяжение кабель-тросов 4, 5 создано постоянной положительной плавучестью платформы.
При работе обеих лебедок 2, 3 (фиг. 1, 2) в режиме погружения платформа будет погружаться до тех пор, пока не будет отключено питание обеих лебедок или до механического контакта клюзов 20 с упором 23. При этом дебалансы 15, 16 будут вращаться внутри герметичных корпусов относительнее осей лебедок 2, 3, а платформа - подниматься под действием положительной плавучести платформы и погружаться в пределах длины одного витка кабель-тросов 4, 5, укладываемого на барабан 9 лебедок 2, 3.
Для перемещения платформы вверх необходимо обеспечить сматывание кабель-тросов 4, 5 с барабанов 9. При этом под действием положительной плавучести платформы по мере сматывания кабель-тросов 4, 5 она будет всплывать.
В режиме подъема платформы электропривод задает направление вращения ведомых валов редуктора 13 и связанных с ними дебалансов 15, 16 (фиг. 3, вид A). При этом моменты, создаваемые дебалансами 15, 16 относительно осей лебедок 2 и 3 (фиг. 1, 2), будут уменьшаться, что приведет к нарушению равенства моментов. Момент, постоянный по величине, создаваемый положительной плавучестью садка-фермы через кабель-тросы 4, 5 (фиг. 3), будет вращать лебедки с барабанами 9, а положительная плавучесть платформы - поднимать ее, сматывая кабель-тросы 4, 5 (фиг. 1, 2) с барабанов 9 (фиг. 3).
Перемещение платформы на другой горизонт по глубине осуществляется режимами погружения или подъема платформы.
В зависимости от режимов работы лебедок 2, 3 (фиг. 1, 2) платформа может быть установлена наклонно относительно горизонтальной плоскости. Наклонное положение платформы может быть использовано при перемещении каретки с перегородкой 17 (фиг. 1) для уменьшения полезного объема контейнера 1.
Величину перемещения платформы можно определить по времени работы электропривода 12 или при помощи дополнительных гидроакустических устройств, например эхолота (на чертеже не показан).
Для извлечения морепродуктов из платформы ее поднимают на поверхность водоема. При помощи ручной лебедки (на чертеже не показано) или описанного выше наклона платформы перегородку 17 перемещают к левому краю контейнера 1, ограничивая полезный объем, (фиг. 1). Затем, находясь на трапе 26 платформы, рабочий персонал при помощи сачков заполняет морепродуктами пришвартованные к платформе специальные плавсредства.
После извлечения морепродуктов каретка с перегородкой 17 перемещается в исходное положение, и цикл выращивания морепродуктов при этом заканчивается.
Различные варианты выполнения платформы (фиг. 1, 2, 4) различаются видами управления средствами погружения, подъема и остановки платформы. Так на фиг. 1 представлен вариант управления платформой по кабелю через герметичный разъем с пласредства (на чертеже не показано).
Для управления платформой в этом варианте плавсредство выходит в место установки платформы. При помощи опущенного излучателя (на чертеже не показан) излучается кодированный акустический сигнал, который принимается автономным гидроакустическим расцепителем 29, и выполняется команда расцепления механической связи с якорем 30. Под действием положительной плавучести буя 28 расцепитель 29, кабель 32 и герморазъем 31 поднимаются на поверхность.
Во втором варианте (фиг. 2) перемещение платформы осуществляется с пульта управления 35, расположенного на берегу, по кабель-тросам 36, 4, 5 в заданных режимах (погружения, подъема и остановки).
В третьем варианте (фиг. 4) в герметичных корпусах лебедок платформы размещают электрические аккумуляторные батареи, приемники гидроакустических сигналов и блоки управления лебедками (на чертеже не показаны).
После прибытия плавсредства в место постановки платформы, с помощью гидроакустического излучателя подаются кодированные команды, обеспечивающие управление электроприводами лебедок в режимах погружения, подъема и остановки. При этом ограничители 23, 24 вертикального перемещения платформы задают конкретную предельную глубину погружения платформы.
Наличие у платформы двух лебедок, закрепленных по краям остойчивой садка-фермы, исключает вращение садка-фермы под действием течения и при перемещении по глубине.
Описанное выше выполнение механизма заглубления и подъема садка-фермы, значительно повышает надежность работы платформы и снижает ее стоимость ввиду отсутствия дорогих и ненадежных пневматических "лебедок" в прототипе и аналоге, а также отсутствия проблемы заиливания якорей и садка-фермы. Подобное выполнение лебедки позволяет выполнить корпус "сухим" и без уплотняемых вращающихся валов.
В режиме эксплуатации платформа может находиться на различных глубинах в подводном положении, что не мешает судоходству и исключает повреждение платформы при штормовой погоде.
Дополнительные аналогичные садки-фермы нейтральной плавучести, механически связанные с первым садком-фермой положительной плавучести, позволяют обеспечить большую производительность по сравнению с прототипом при меньших габаритах и стоимости платформы.
Все это позволяет достичь поставленный в заявке технический результат.
Источники информации
1. Заявка Франции N 2458216, кл. A 01 K 63/00, 1977.
2. Патент США N 5.251.571, кл. 119-215 (A 01 K 61/00), 1993 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕБЕДКА | 2008 |
|
RU2351531C1 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2172272C1 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2199835C2 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС (ВАРИАНТЫ) | 2001 |
|
RU2220069C2 |
| ПОДВОДНОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2370406C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178629C1 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2300479C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| ГИДРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МОРСКОЙ СРЕДЫ | 1999 |
|
RU2159020C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ПОДВОДНОГО ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2191399C2 |

Изобретение относится к области рыбоводства и может быть использовано для выращивания и хранения различных морепродуктов в естественной среде обитания. Платформа содержит садок-ферму в виде сетчатого контейнера положительной плавучести и механизм его заглубления и подъема. Последний выполнен в виде двух лебедок, кинематически связанных с двумя кабель-тросами. Лебедки закреплены на противоположных сторонах садка-фермы и выполнены в виде жестко связанных герметичного корпуса и намоточного барабана, закрепленных соосно на двух полуосях. Внутри каждого корпуса закреплен реверсивный электропривод с редуктором, имеющим самотормозящую передачу. На ведомом валу редуктора соосно полуосям установлен дебаланс. Каждая из лебедок выполнена сбалансированной относительно полуосей (кроме дебаланса). Подобное выполнение механизма заглубления и подъема садка-фермы позволяет улучшить эксплуатационные качества платформы и снизить ее стоимость при большей производительности. 10 з.п.ф-лы, 5 ил.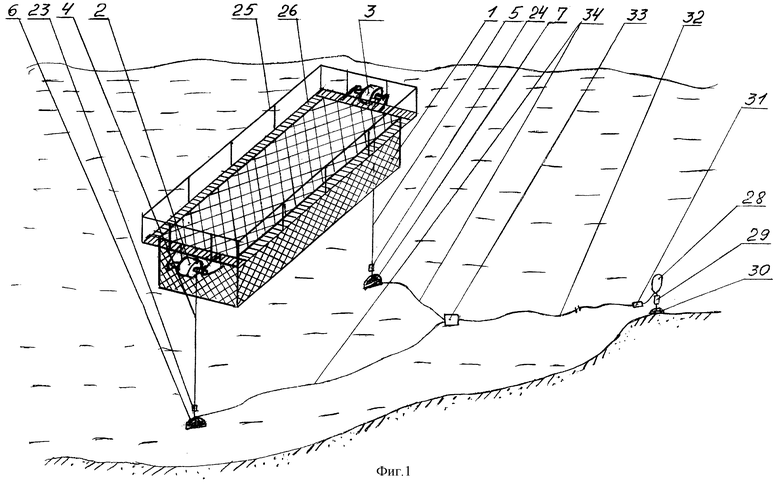
| US 5251571 A, 12.10.1993 | |||
| Установка для выращивания рыбы | 1985 |
|
SU1243658A1 |
| ПОГРУЖНОЕ САДКОВОЕ УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РЫБЫ | 1996 |
|
RU2105471C1 |
| САДОК ДЛЯ ВЫРАЩИВАНИЯ РЫБЫ | 1997 |
|
RU2115310C1 |

