Изобретение относится к гидроакустике и может быть использовано для измерения параметров шумоизлучения движущихся подводных и надводных плавсредств в натурном водоеме.
Известны способы того же назначения [1-3] , заключающиеся в расположении гидроакустического рабочего средства измерений (РСИ) на определенном траверзном расстоянии от контролируемого движущегося объекта и измерении уровня давления шумоизлучения движущегося объекта с помощью установленного в натурном водоеме гидроакустического РСИ.
Последний способ [3] принят за прототип.
Недостатком аналогов и прототипа является невозможность с их помощью решать поставленную задачу в любом месте натурного водоема, тогда когда это необходимо экипажу движущегося объекта, например, для контроля исправности работы механизмов.
В прототипе для решения поставленной задачи надводный или подводный объект вынужден возвращаться на свою базу (гидроакустический измерительный полигон) порой за тысячи километров.
Техническим эффектом, получаемым от внедрения изобретения, является устранение отмеченного недостатка, то есть обеспечение возможности измерения параметров шумоизлучения движущегося объекта в требуемый период времени в любой точке натурного водоема.
Данный технический результат достигают за счет того, что в известном способе измерения уровня давления шумоизлучения движущегося объекта в натурном водоеме, заключающемся в расположении гидроакустического РСИ на определенном траверзном расстоянии от контролируемого движущегося объекта и измерении уровня давления шумоизлучения движущегося объекта с помощью установленного в натурном водоеме гидроакустического РСИ, гидроакустическое РСИ устанавливают на определенном траверзном расстоянии от контролируемого движущегося объекта непосредственно с самого движущегося объекта, преимущественно через люк последнего.
Кроме того, РСИ устанавливают на определенном траверзном расстоянии от контролируемого движущегося объекта с помощью автономной донной станции (АДС), выбрасываемой через люк в корпусе движущегося объекта.
При этом пространственные координаты размещения АДС с РСИ в натурном водоеме определяются по времени ее выброса из люка в корпусе движущегося объекта и траектории перемещения последнего.
Кроме того, с контролируемого движущегося объекта на определенном расстоянии от первого РСИ с помощью дополнительных АДС устанавливают второе РСИ или два и более дополнительных РСИ, причем все РСИ располагают на заданных глубинах водоема и снабжают средствами единой шкалы времени.
При этом каждая АДС выполнена с возможностью изменения глубины своего расположения в натурном водоеме.
В якорных устройствах каждой АДС установлен сейсмоприемник, заглубленный в слой донных осадков.
При этом по крайней мере одна из АДС снабжена гидроакустическим источником опорных сигналов. А уровень излучаемого звукового давления источником опорных сигналов задается ниже или равным уровню морских шумов, при этом излучаемые опорные сигналы снабжаются известным признаком.
Кроме того, по крайней мере одну из АДС снабжают гидроакустическим маяком.
При этом измеренная с помощью гидроакустического РСИ информация об уровне давления шумоизлучения контролируемого движущегося объекта передается непосредственно на сам движущийся объект по гидроакустическому или радиоканалам с использованием спутниковой системы связи по запросу с движущегося объекта.
Изобретение поясняется чертежом, на котором представлена схема реализации способа.
Через люк 1 в движущемся объекте 2 в натурном водоеме 3 выбрасывается в собранном виде АДС с закрытым корпусом 4. От него отделяется устройство 5 положительной плавучести, связанное тросом 6 с основной частью АДС, служащее стабилизатором при погружении АДС за счет якорного устройства 7 и обеспечивающее ее мягкое приземление на дно 8 водоема 3 в вертикальном положении (на чертеже положение а)).
После приземления АДС (положение б)) ее корпус 4 раскрывается. При этом якорное устройство 7 надежно закрепляет станцию на дне 8, на котором устанавливается также сейсмоприемник 9 (положение в)), заглубляющийся в слой донных осадков (ила).
По команде с объекта из корпуса 4 АДС всплывает контейнер 10 положительной плавучести, закрепленный тросом 11 на якорном устройстве 7. (При передаче команд используется гидроакустический канал связи. ) Из контейнера 10 с помощью устройства 5 положительной плавучести вытягивается на заданную глубину РСИ (например, выполненная в виде гидроакустической антенны 12).
Глубина расположения контейнера 10 задается либо длиной троса 11 (буйрепа) до заякоревания АДС, либо путем передачи на нее кодированного сигнала, определяющего глубину, на которой прекращается распускание троса 11 с помощью стопора, управляемого датчиками глубины (гидростатического давления), расположенными на контейнере 10 (на чертеже не показаны).
Изменение глубины контейнера при повторных измерениях осуществляется путем размыкания стопора и его повторным замыканием при достижении нового значения глубины (ее уменьшения), что определяется посылкой на АДС с движущегося объекта командного сигнала.
При этом горизонтальные координаты определяются моментом ее выброса и траекторией перемещения движущегося объекта 2.
Текущая координата между приемной антенной 12 и движущимся объектом 2 определяется с помощью системы измерения дистанции (СИД), функционирующей, как в прототипе, на основе измерения моментов прихода кодированных акустических сигналов, излучаемых излучателем, установленным на контейнере 4 или на приемной гидроакустической антенне 12 (на чертеже излучатель не показан).
Сигналы СИД кодируются таким образом, чтобы обеспечить их прием движущимся объектом 2 даже при уровнях, лежащих ниже уровня шумов моря.
Для определения пространственных параметров гидроакустического излучения движущегося объекта 2 устанавливается несколько пространственно разнесенных АДС, снабженных системой единого времени (на чертеже не показана), содержащей генератор единой частоты, обладающий высокой стабильностью.
Для обеспечения предварительной (или полной) обработки регистрируемых акустических сигналов АДС снабжены соответственными ЭВМ (на чертеже не показаны).
Для обеспечения повторных измерений характеристик акустических шумов другого движущегося объекта на АДС, находящейся в режиме ожидания, подается с этого объекта кодированный сигнал, переводящий ее в активный режим работы (на чертеже средства связи АДС с другими объектами не приведены).
Передача зарегистрированной (и обработанной) информации может осуществляться как на сам движущийся объект 2 с помощью, например, ультразвукового передатчика 13, так и на берег в реальном масштабе времени. Для этого на АДС подается акустический сигнал на всплытие устройства 5 положительной плавучести (положение г)), связанного с контейнером 10 тонким электрическим кабелем 14 и несущее на себе радиопередающее устройство 15, которое передает сигналы на спутниковые системы связи (на чертеже не показаны).
Согласно изобретению в натурном водоеме 3 с движущегося объекта 2 может быть установлены две или более АДС (на чертеже этот случай не представлен). Причем по крайней мере одна из АДС может быть снабжена источником 16 опорных сигналов для возможности обнаружения АДС другими объектами.
Уровень излучаемого звукового давления источником 16 опорных сигналов, как в прототипе, задается меньшим или равным уровню морских шумов, при снабжении излучаемых опорных сигналов известным признаком.
Кроме того, по крайней мере, одна из АДС может быть снабжена радиомаяком (на чертеже не показан). А все автономные донные системы снабжаются управляемыми устройствами самоликвидации (на чертеже не показаны).
Способ реализуется следующим образом.
После расположения АДС с гидроакустической антенной 12 в заданной области натурного водоема 3 на нее с движущегося объекта 2 посылается командный сигнал на подключение всех рабочих электронных блоков, расположенных в контейнере 10, к источникам питания (на чертеже не показаны). При этом с ультразвукового излучателя 13 на объект 2 направляется сигнал о готовности АДС к работе.
Затем объект 2 проходит требуемое количество галсов мимо антенны 12, принимающей шумоизлучение объекта. Измеренные параметры шумоизлучения после обработки с помощью ЭВМ по ультразвуковому сигналу с помощью излучателя 13 направляются к движущемуся объекту 2, где принимаются и обрабатываются с помощью соответствующей аппаратуры (на чертеже не показана).
В другом варианте информация о параметрах шумоизлучения объекта 2 может передаваться на надводные или береговые средства обработки и регистрации по радиоканалу с помощью радиопередающего устройства 15.
В зависимости от поставленной задачи объект 2 осуществляет галсы мимо двух-трех или более РСИ.
Два РСИ образуют акустический интерферометр, позволяющий решить ряд динамических задач для гидроакустических средств объекта 2.
Три и более РСИ позволяют осуществить проверку работы навигационного оборудования объекта 2.
При этом для определения вертикальных распределений акустического излучения движущегося объекта 2 РСИ на различных АДС при каждом режиме прохождения устанавливают на разных глубинах.
Для регистрации особо низкочастотного акустического излучения движущегося объекта 2 используют сейсмоприемник 9.
В случае многократного использования АДС для измерения параметров шумоизлучения одного и того же или разных движущихся объектов по окончании каждой серии измерений вся хранящаяся в ней информация стирается с целью увеличения эффективности использования объема памяти размещенной на ней ЭВМ.
После окончания программы измерений с движущегося объекта 2 подается сигнал на переход АДС в режим ожидания с минимальным энергорасходом или на самоликвидацию.
В первом режиме остается в работе только источник 16 опорных сигналов и (или) радиомаяк. Это позволяет всегда найти АДС в натурном водоеме с подводного или надводного объектов.
Таким образом, данный способ позволяет определить параметры шумоизлучения движущегося объекта в требуемой области натурного водоема без возвращения объекта на базу, чем достигается поставленный технический результат.
Источники информации
1. Патент 2010456 РФ, кл. H 04 R 1/44, 1992.
2. Патент 2063106 РФ, кл. H 04 R 29/00, 1992.
3. Патент 2108007 РФ, кл. H 04 R 1/44, 1994 - прототип.
Изобретение относится к гидроакустике и может быть использовано при разработке технологии измерений параметров шумоизлучения движущихся подводных и надводных плавучих средств в натурном водоеме. Сущность изобретения заключается в том, что через люк контролируемого подводного или надводного объекта в заданную область натурного водоема выбрасывают гидроакустическое рабочее средство измерений, например с помощью автономной донной станции, на определенном траверзном расстоянии от контролируемого движущегося объекта и измеряют уровень давления щумоизлучения движущегося объекта. Технический результат реализации изобретения заключается в том, что устраняется невозможность осуществления измерений в любом месте натурного водоема и необходимость возврата надводного или подводного объекта на свой гидроакустический измерительный полигон для выполнения указанных выше измерений. 13 з. п. ф-лы, 1 ил.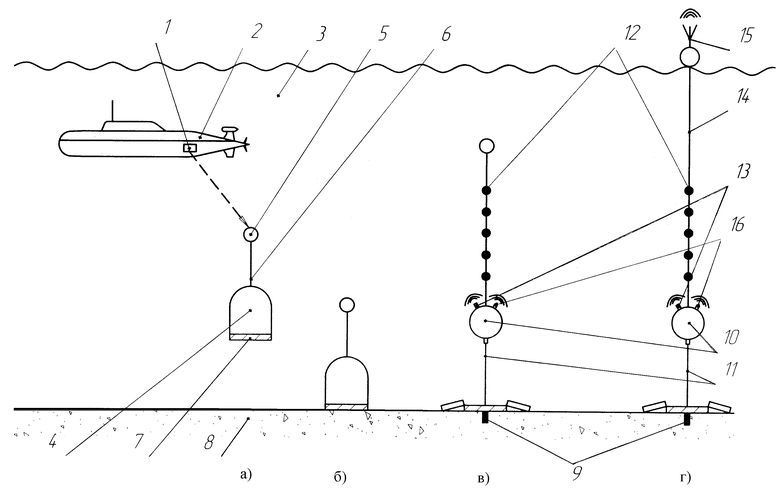
6. Способ по п. 2 или 5, отличающийся тем, что каждая автономная донная станция выполнена с возможностью изменения глубины своего расположения в натурном водоеме.
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 1994 |
|
RU2108007C1 |
| US 4794545 A, 27.12.1988 | |||
| US 5493540 А, 20.02.1996. | |||

