Изобретение относится к областям радиолокации и гидроакустики и может быть использовано для обнаружения летательного аппарата (в частности, вертолета разведчика) над морской акваторией с подводного плавсредства, находящегося в погруженном состоянии.
Известен способ обнаружения летательного аппарата над морской акваторией с подводного плавсредства, заключающийся в обследовании воздушного пространства над морской акваторией электромагнитными волнами с помощью радиолокатора и приеме отраженных от летательного аппарата вторичных электромагнитных волн, по которым судят о наличии летательного аппарата над морской акваторией в зоне пребывания плавсредства [1].
Данный способ принят за прототип.
Недостатком прототипа является невозможность решения поставленной задачи в погруженном состоянии плавсредства.
Техническим результатом, получаемым от внедрения изобретения, является устранение данного недостатка прототипа, т.е. получение возможности обнаружения летательного аппарата над контролируемой морской акваторией с подводного плавсредства, находящегося в погруженном состоянии.
Данный технический результат получают за счет того, что в известном способе обнаружения летательного аппарата с подводного плавсредства, заключающемся в обследовании воздушного пространства над морской акваторией с помощью электромагнитных волн радиолокатора и приеме отраженных от летательного аппарата вторичных электромагнитных волн, по которым судят о наличии летательного аппарата над морской акваторией в зоне пребывания плавсредства, радиолокатор устанавливают на буе положительной плавучести, выталкиваемым на поверхность обследуемой морской акватории из находящегося в погруженном состоянии плавсредства.
Причем прием информации о наличии летательного аппарата над морской акваторией осуществляют на плавсредстве по гидроакустическому каналу.
Для расширения зоны обследования устанавливают один или несколько дополнительных аналогичных радиолокаторов на аналогичных буях положительной плавучести и выталкивают последние из плавсредства через заданные интервалы времени.
В качестве варианта реализации способа буй положительной плавучести выталкивают на поверхность обследуемой морской акватории на кабель-тросе регулируемой длины.
В качестве другого варианта реализации способа радиолокаторы закрепляют на воздушных аппаратах положительной (по отношению к воздуху) плавучести, связанные кабель-тросами с соответствующими буями положительной плавучести.
Все буи положительной плавучести могут быть дополнительно снабжены гидроакустическими рабочими средствами измерений уровня шумности подводного плавсредства, а также дополнительно снабжены микрофонами, характеристики направленности которых ориентированы от поверхности морской акватории.
Дополнительные пункты формулы изобретения не нарушают единства изобретения, а лишь развивают и уточняют признаки основного пункта формулы изобретения.
Так, например, в п.5 формулы изобретения радиолокаторы закрепляют на воздушных аппаратах положительной плавучести, но при этом радиолокатор остается установленным на буе положительной плавучести, поскольку связан с ним кабель - тросом.
Кроме того, в статическом состоянии воздушный аппарат положительной плавучести непосредственно расположен на буе положительной плавучести. То есть в любом случае радиолокатор получается установленным на буе положительной плавучести.
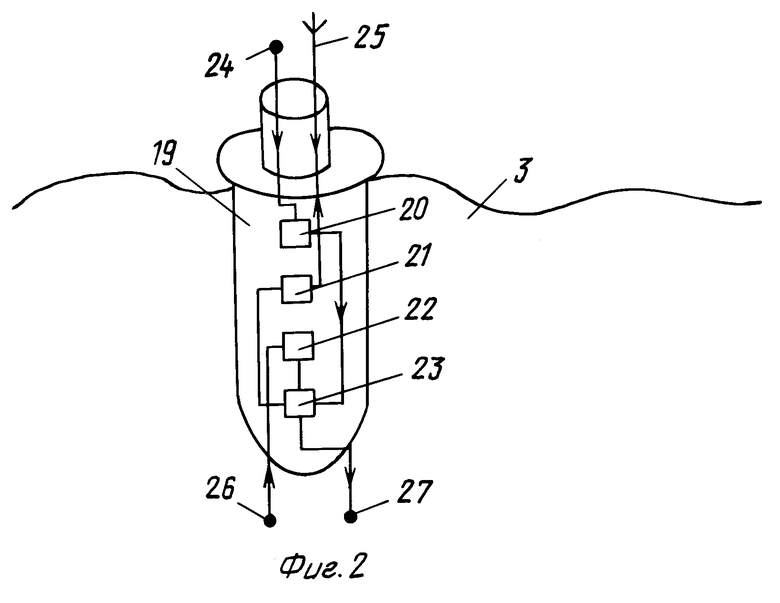
Изобретение поясняется чертежом, на фиг.1 которого представлен пример схемы реализации способа, а на фиг.2 - схематичное устройство буя положительной плавучести.
Схема реализации способа включает в себя подводное плавсредство 1 с гидроакустическим приемопередающим преобразователем 2. В установленные моменты времени, например, через торпедный люк в корпусе плавсредства 1 в морскую среду 3 выталкиваются буи 4, 5, 6 положительной плавучести, на которых могут быть закреплены радиолокатор 7 и (или) микрофон 8 или воздушный аппарат 9 положительной относительно воздуха плавучести.
На воздушном аппарате 9 одновременно могут быть закреплены радиолокатор 10 и микрофон 11.
Буи 4, 5, 6 положительной плавучести снабжены приемопередающими гидроакустическими преобразователями 12, 13, 14 для формирования гидроакустического канала связи с подводным плавсредствм 1 через гидроакустический преобразователь 2.
Буй 4 положительной плавучести может также включать в себя гидроакустическое рабочее средство 15 измерений уровня шумности подводного плавсредства 1 предпочтительно в его кормовом направлении.
На фиг. 1 также представлен случай реализации способа, когда буй 16 с радиолокатором 17 выталкивается из подводного плавсредства 1 на кабель-тросе 18 регулируемой длины.
Внутри каждого автономного буя положительной плавучести, например в буе 19 (фиг. 2), имеются автономные источники питания (не показаны) и блоки 20, 21, 22, 23 предварительной обработки информации, подключенные соответственно к микрофону 24, радиолокатору 25, гидроакустическому рабочему средству 26 измерений уровня шумности плавсредства 1 (фиг.1) и приемопередающему гидроакустическому преобразователю 27.
Схема электрических соединений блоков 20, 21, 22, 23 представлена на фиг.2.
Для случая реализации способа с воздушным аппаратом 9 блоки предварительной обработки информации и источники питания могут находиться в воздушном аппарате 9 (не показан). Информация о летательном аппарате 28 может передаваться по кабель-тросу 29, связывающему аппарат 9 с буем 6 (фиг.1).
Способ реализуется следующим образом.
Перед всплытием на поверхность морской акватории 3 подводное плавсредство с помощью своих гидроакустических средств обнаружения (не показаны) убеждается в отсутствии надводных плавсредств на поверхности акватории.
Затем с помощью буев 4 и (или) 5 и (или) 6 и (или) буя 16, выталкиваемых с плавсредства 1, например, через торпедный люк (не показан) на плавсредстве 1 убеждаются в отсутствии над морской акваторией 3 летального аппарата 28.
Для этого используются пассивные акустические средства (микрофоны 8, 11) или активные радиотехнические средства (радиолокаторы 7, 10, 17).
Для увеличения дальности действия средств обнаружения используется воздушный аппарат 9 положительной плавучести, связанный с буем 6 кабель-тросом 29. Вывод воздушного аппарата 9 из зацепления с буем 6 осуществляется по гидроакустическому каналу 30 с помощью приемопередающих преобразователей 2, 14 с борта подводного плавсредства 1.
Сначала (для обеспечения скрытности поиска) работают пассивные акустические средства обнаружения (микрофоны 8 или 11).
Если микрофоны 8 или 11 обнаружили присутствие летательного аппарата 28 над акваторией 3 по наличию характерного аэродинамического шума, то плавсредство 1 совершает соответствующий маневр, а буй (или буи), а также воздушный аппарат 9 могут подвергнуться самоликвидации по команде с плавсредства 1. Соответствующие команды направляются на соответствующие буи и воздушный аппарат по гидроакустическим каналам 30, 31, 32 и по кабель-тросу 18, 29.
Если микрофоны 8 или 11 не обнаружили наличия летательного аппарата 28 над акваторией 3, то по команде с плавсредства 1 по гидроакустическим каналам 30, 32 и по кабель-тросам 18, 29 направляются команды на активный режим поиска цели (летательного аппарата 28).
Радиолокаторы (изображенные на чертеже в виде приемопередающих антенн 7, 10, 17, 25) направляют в различные стороны надводной полусферы радиоимпульсы, которые при наличии летательного аппарата 28 в зоне действия радиолокаторов отражаются от цели и принимаются на буях 4, 16 или воздушном аппарате 9. Затем информация о наличии летательного аппарата 28 над морской акваторией 3 направляется на подводное плавсредство по гидроакустическим каналам 30,32 и (или) кабель-тросам 18,29.
После обследования воздушного пространства над морской акваторией 3 на подводном плавсредстве принимают решение о последующем маневре.
Для контроля уровня шумности подводного плавсредства 1 непосредственно с самого плавсредства на буе 4 (или нескольких буях) устанавливается гидроакустическое рабочее средство 15 измерения шумности. Информация об уровне шумности, например, в кормовом направлении 33 направляется по гидроакустическому каналу 32.
После проведенных экспериментов все буи и воздушный аппарат могут быть подвергнуты самоликвидации.
Таким образом, в отличие от прототипа в данном техническом решении поиск и обнаружение летательного аппарата над морской акваторией ведется в подводном положении плавсредства, чем достигается поставленный технический результат.
Источники информации
1. Большая Советская энциклопедия, том 33, Гос научн. изд-во "Большая Советская энциклопедия", М., 1955, стр.387, 388 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| ПЛАТФОРМА ДЛЯ ВЫРАЩИВАНИЯ И ХРАНЕНИЯ МОРЕПРОДУКТОВ | 2000 |
|
RU2177222C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178629C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2199835C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2004 |
|
RU2258325C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
Изобретение относится к области гидроакустики и радиолокации и может быть использовано для обнаружения летательного аппарата, в частности вертолета-разведчика, над морской акваторией с подводного плавсредства, находящегося в погруженном состоянии. В заявленном способе из находящегося в погруженном состоянии плавсредства на кабель-тросе регулируемой длины выталкивают буи положительной плавучести, при этом радиолокаторы и микрофоны устанавливают на буях положительной плавучести или закрепляют на воздушных аппаратах, связанных кабель-тросами с соответствующими буями положительной плавучести. С помощью радиолокаторов и микрофонов обследуют воздушное пространство над морской акваторией, по результатам которого судят о наличии летательного аппарата над морской акваторией в зоне пребывания подводного плавсредства, при этом сначала работают пассивные акустические средства обнаружения - микрофоны, и если они не обнаружили наличия летательного аппарата над морской акваторией, то по команде с плавсредства по кабель-тросам направляются команды на активный поиск летательного аппарата радиолокаторами. Достигаемым техническим результатом изобретения является расширение зоны обнаружения летательного аппарата над морской акваторией с подводного плавсредства, находящегося в погруженном состоянии. 2 ил.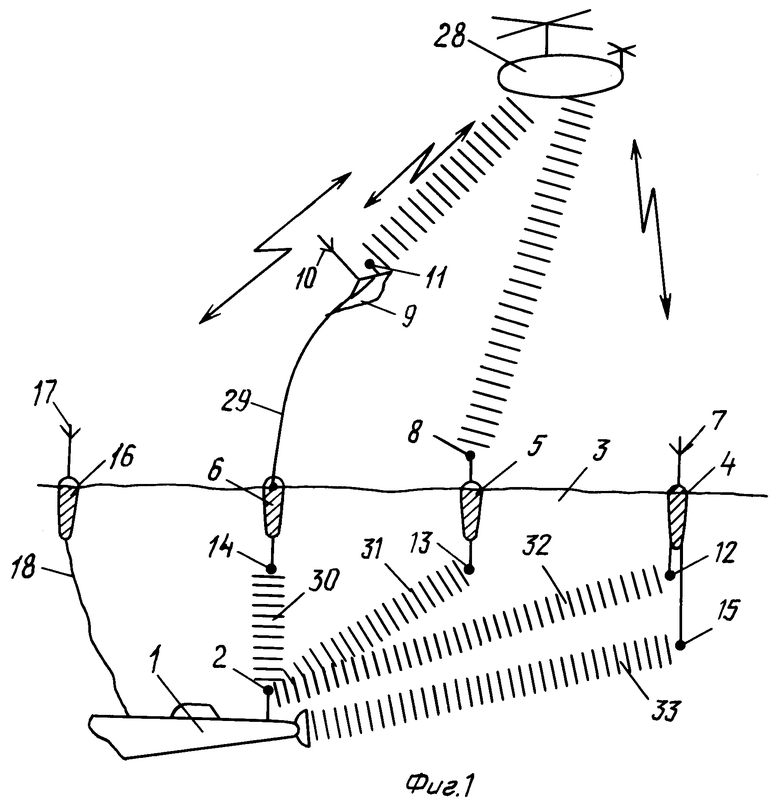
| ПОЛИУРЕТАНОВЫЙ ОГНЕЗАЩИТНЫЙ СОСТАВ | 2012 |
|
RU2560146C2 |
| ПИРУМОВ B.C | |||
| и др | |||
| Радиоэлектроника в войне на море | |||
| - М.: Воениздат, 1987, с.64 | |||
| US 6058071, 02.05.2000 | |||
| ПОДВОДНОЕ ТРАНСПОРТНОЕ СУДНО | 1989 |
|
RU2046052C1 |
| US 4794575, 27.12.1988 | |||
| ПЕРЕДАЧА СИГНАЛОВ С ПЕРЕМЕННОЙ СКОРОСТЬЮ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ С ИСПОЛЬЗОВАНИЕМ ГРУППОВОГО КОДИРОВАНИЯ | 1994 |
|
RU2142201C1 |

