Предложение относится к устройствам для физиотерапии, а именно к массажерам с вращающимися механическими валиками, и может быть использовано как в бытовых условиях, так и в медицинских стационарах в качестве лечебно-профилактического средства.
Известен механический массажер по патенту США N 5741219, содержащий рукоятку, узел сочленения, множество вращающихся массажных валиков, расположенных на осях, соединенных с узлом сочленения.
Известны также устройства по заявке Германии N 4300219, согласно которой рукоятка массажера соединена с осью массажного валика посредством упругого элемента регулируемой длины, и по заявке ЕПВ N 0465758, когда массажный валик соединен с рукояткой с возможностью поворота вокруг поперечной относительно рукоятки оси. Все указанные устройства имеют ограниченные функциональные возможности по спектру воздействия на массируемую поверхность.
Повысить эффективность и сократить время процедуры позволяют устройства для массажа по авт.св. СССР N 1711886, 1711887, содержащие рукоятку, образованную концами двуплечих, шарнирно соединенных рычагов, на которой непосредственно или с помощью карданных шарниров установлены массажные валики, а также механизм регулирования расстояния между массажными валиками, выполненный в виде дисков с эластичным роликом или в виде зубчатого приспособления с фиксатором. Эти устройства достаточно сложны в эксплуатации, так как требуют настройки на каждую процедуру.
Наиболее близким по своей технической сущности к заявляемому является устройство по патенту США N 5218955, которое содержит, как минимум, пару массажных валиков, узел сочленения, в котором закреплены оси массажных валиков, и рукоятку, снабженную упором, входящим в контакт с кожей массируемого участка.
Однако лечебное воздействие этого устройства недостаточно эффективно, так как не исключается травматичность за счет зажатия тканей между жестко установленными валиками, достаточно трудно дается плавное криволинейное обкатывание обрабатываемого участка тела, лечебное воздействие создается только в одном направлении движения, воздействие на участки кожи с разной плотностью происходит неравномерно. Кроме того, для увеличения области воздействия устройство требует усложнения конструкции и не позволяет получить гибкого изменения алгоритма воздействия в период проведения процедуры.
Задачей заявляемого предложения является повышение эффективности лечебного воздействия механического массажера за счет увеличения объема захватываемых тканей, исключения возможности травмирования массируемых тканей (в том числе при максимальных усилиях) и обеспечения активного воздействия (сжатия тканей) при движении массажера в обоих направлениях, а также увеличения избирательности воздействия за счет автоматического увеличения степени сжатия тканей по мере нарастания усилия прижатия массажера в процессе процедуры массажа.
Это достигается тем, что механический массажер, содержащий массажные валики, рукоятку, пару осей, на которых с возможностью свободного вращения вокруг них расположены массажные валики, и узел сочленения, с которым соединена ось рукоятки и пара осей с массажными валиками, отличается тем, что в первом варианте массажные валики установлены с возможностью перемещения вдоль своих осей соответственно. Во втором варианте для решения задачи оси массажных валиков соединены с узлом сочленения с возможностью поворота вокруг оси, расположенной перпендикулярно относительно оси рукоятки в полости, которая снабжена устройством регулирования угла между осями массажных валиков.
На фиг. 1 приведена конструкция механического массажера, предусматривающая возможность перемещения массажных валиков вдоль своих осей. На фиг. 2-4 показаны конструктивные решения, обеспечивающие возможность поворота осей массажных валиков вокруг оси, расположенной перпендикулярно относительно оси рукоятки. На фиг. 5 представлено техническое решение, когда узел сочленения и ось рукоятки соединены между собой с помощью упругого элемента.
Механический массажер, конструкция которого приведена на фиг. 1, содержит узел сочленения 1, к которому жестко крепятся рукоятка 2 своей осью 3 и пара осей 4, образующих друг относительно друга некоторый угол. На осях 4 с возможностью свободного вращения вокруг них располагаются массажные валики 5. Формообразование валиков 5 выполняется таким образом, что они представляют собой тела вращения, на поверхности которых расположены выступы 6 заданной формы и размеров. Валики 5 со стороны, противоположной узлу сочленения 1, имеют относительно осей 4 кольцевые пазы, в которых располагаются пружины 7, которые удерживаются в пазах головками 8 винтов.
Валики 5 выполняются, например, из медицинского пластиката. Они могут быть выполнены также из металла или других материалов, в том числе в виде набора из "звездочек".
Предлагаемый массажер может быть выполнен в варианте, когда предусмотрена не одна пара массажных валиков 5, а множество таких пар, расположенных встречно, параллельно и встречно-параллельно относительно друг друга на соответственных парах осей 4, жестко укрепленных в узле сочленения 1.
Работает механический массажер (фиг. 1) следующим образом. С помощью рукоятки 2 задают возвратно-поступательные движения массажных валиков 5, воздействующих выступами 6 на предназначенный к процедуре участок тела. В результате воздействия осуществляется точечный массаж с одновременным поперечным смещением (сжатием - растяжением) тканей. При этом массажные валики 5 смещаются вдоль собственных осей 4 на расстояние, величина которого пропорциональна силе прижатия массажных валиков 5 к массируемому участку тела. Это увеличивает фронт воздействия устройства, так как возрастает объем охватываемых процедурой тканей. Кроме того, исключается травматичность, так как зажатия тканей между валиками 5 не происходит. Однако конструкция массажера при возвратно-поступательном движении по массируемому участку обеспечивает требуемое воздействие только в одном направлении движения, работая в противоположном направлении на "холостом ходу".
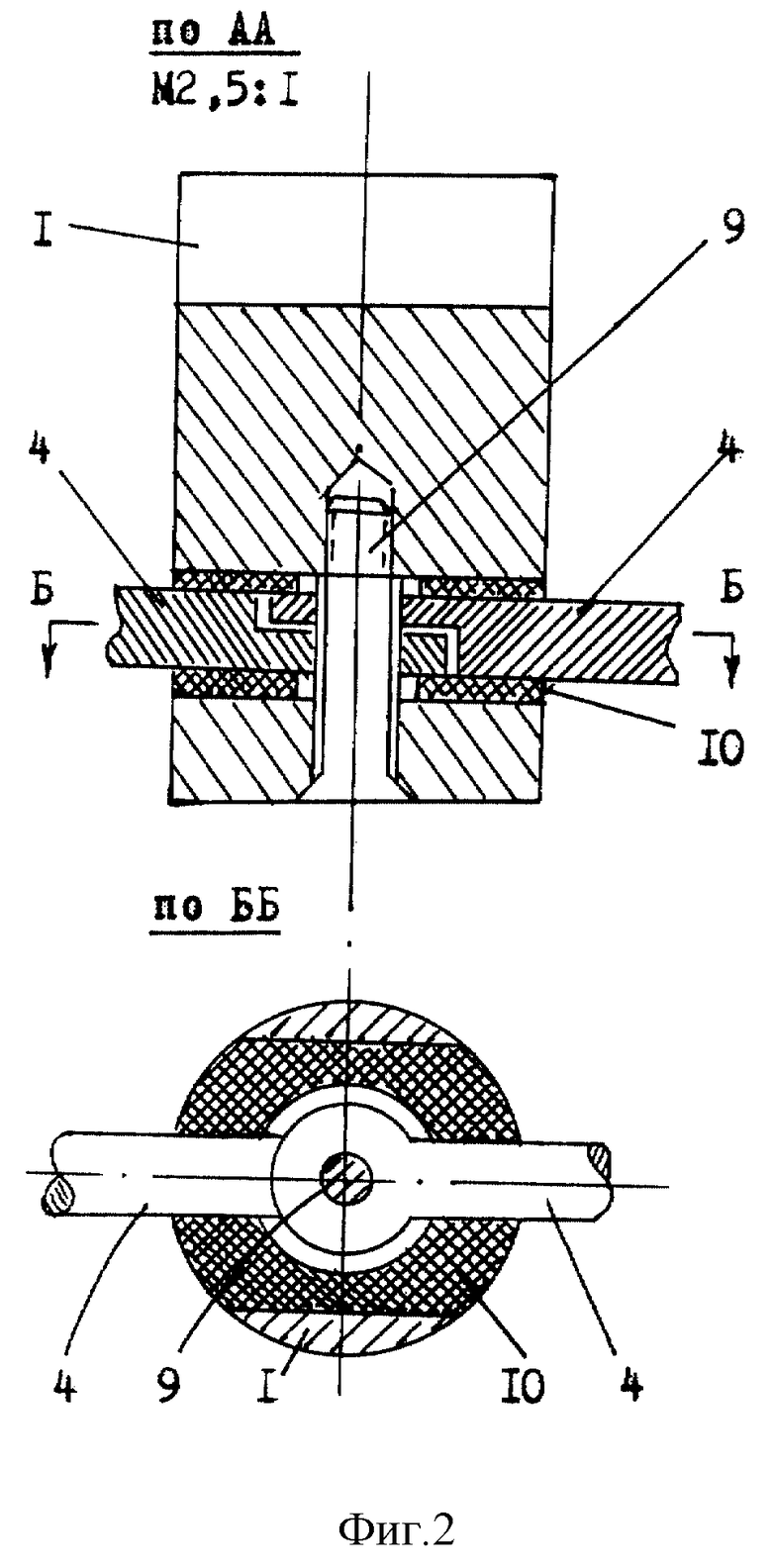
Повысить эффективность массажера за счет работы на сжатие в обоих направлениях позволяет конструкция, в которой оси массажных валиков соединены с узлом сочленения с возможностью регулируемого поворота вокруг оси, расположенной перпендикулярно относительно оси рукоятки. Вариант реализации такой конструкции показан на фиг. 2, где представлены сечения узла сочленения 1. В теле узла сочленения 1 выполнена полость, внутри которой оси 4 массажных валиков соединены с возможностью поворота вокруг оси 9. Полость узла сочленения снабжена устройством регулирования угла между осями 4 валиков, функции которого в данном случае выполняет упругий вкладыш 10.
При движении массажных валиков в прямом направлении их оси 4 в зависимости от силы прижатия деформируют упругий вкладыш 10 и устанавливаются под углом друг к другу. При той же силе прижатия при движении в обратную сторону оси 4 устанавливаются относительно друг друга под таким же углом относительно направления движения. Имеет место полная симметрия воздействия массажных валиков вне зависимости от направления их перемещения.
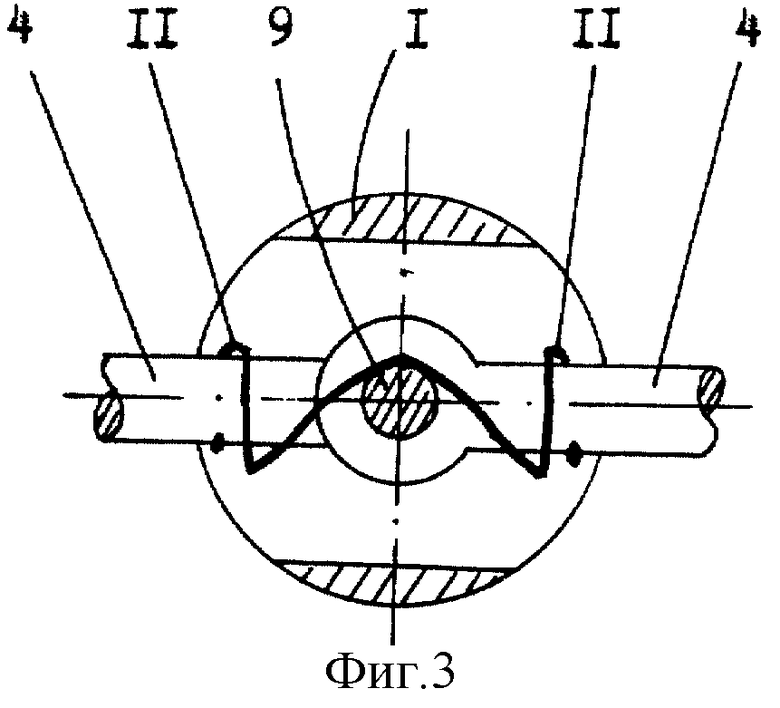
Обеспечить возможность регулируемого поворота осей массажных валиков вокруг оси, расположенной перпендикулярно относительно оси рукоятки, можно также с помощью конструкций, представленных на фиг. 3 и 4. Это достигается тем, что узел сочленения 1 (фиг. 3) снабжен расположенными в его полости двумя плоскими встречными пружинами 11, одни концы которых взаимодействуют соответственно с осями 4 массажных валиков, а другие концы пружин 11 жестко соединены с осью 9 поворота осей 4 массажных валиков. При этом начальная фаза прокатывания осуществляется с малой силой прижатия, в результате чего валики оказываются соосными, вызывая точечное воздействие (предварительный разогрев массируемого участка). По мере увеличения силы прижатия происходит увеличение амплитуды движения осей 4 валиков относительно оси 9, вплоть до достижения минимального угла между осями 4, соответствующего максимальной силе прижатия. Тем самым обеспечивается оптимальное соотношение между интенсивностью воздействия и степенью подготовленности (достигнутого расслабления) массируемых тканей.
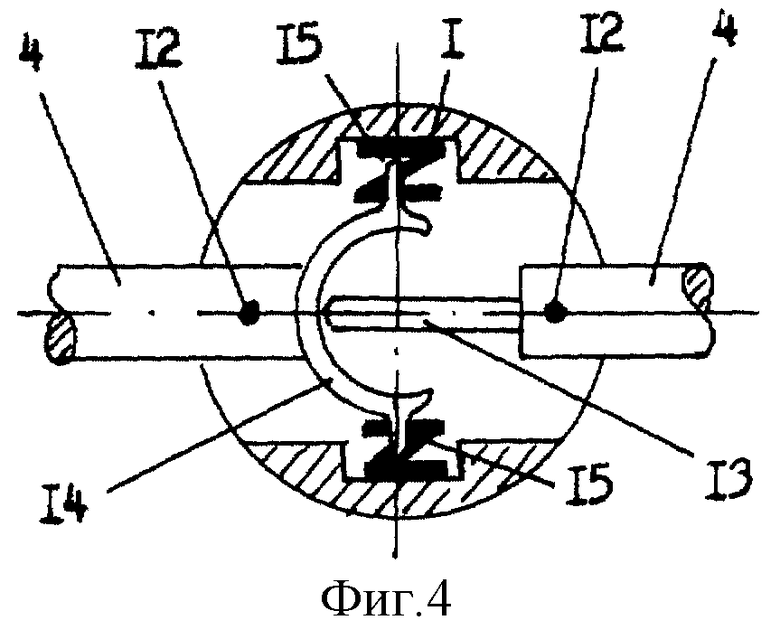
В реализации, представленной на фиг. 4, оси 4 массажных валиков соединены с узлом сочленения 1 с помощью отдельных осей 12 поворота, расположенных перпендикулярно относительно оси рукоятки. Концы осей 4 массажных валиков, обращенных внутрь узла сочленения, снабжены соответственно пальцем 13 и полукольцом 14, взаимодействующими друг с другом. Полукольцо 14 взаимодействует также с упругими элементами 15, установленными в полости узла сочленения 1.
Возможность поворота осей 4 массажных валиков вокруг осей 9 (фиг. 3) или 12 (фиг. 4) при движении в разных направлениях позволяет с помощью силы прижатия организовать алгоритм процедуры воздействия в широких пределах, например туда - сжатие, обратно - просто прокатывание.
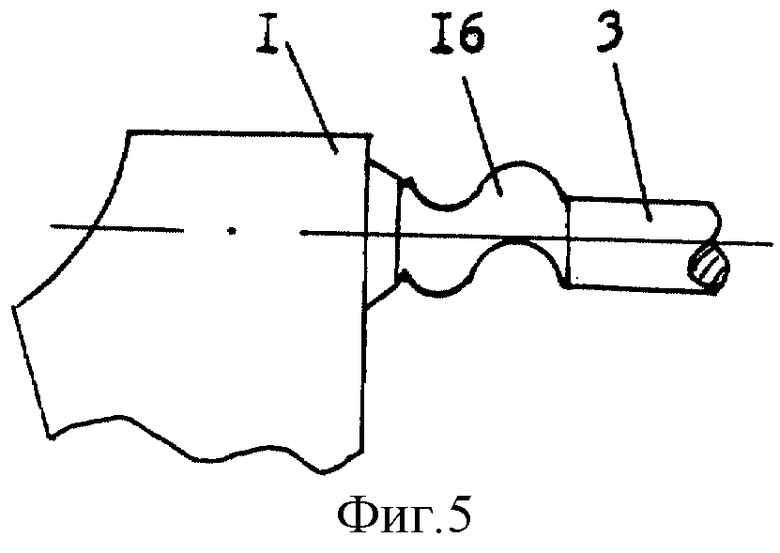
Массируемая поверхность может иметь участки с различной плотностью и кривизной, сила прижатия на которые передается через рукоятку массажера. Для выравнивания интенсивности воздействия в этом случае ось 3 (фиг. 5) рукоятки соединяется с узлом сочленения 1 с помощью упругого элемента 16.
Предлагаемые решения узлов массажера могут быть использованы одновременно в одном конструктиве или в зависимости от конкретного функционального назначения устройства реализуются в конкретной конструкции в необходимом для выполнения задач сочетании.
Предложение прошло опытную проверку и подтвердило повышение эффективности лечебного воздействия использованных конструкций механических массажеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКИХ ЗАПОРОВ | 2003 |
|
RU2245128C1 |
| СПОСОБ ЛЕЧЕНИЯ СЕКСУАЛЬНЫХ НАРУШЕНИЙ У МУЖЧИН | 2003 |
|
RU2266095C2 |
| МЕХАНИЧЕСКИЙ МАССАЖЕР | 1990 |
|
RU2010560C1 |
| Массажер | 2019 |
|
RU2711494C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| МАССАЖЕР | 1997 |
|
RU2113838C1 |
| МАССАЖЁР ДЛЯ ВОЗДЕЙСТВИЯ НА МЫШЦЫ СПИНЫ ТРЕХ ОТДЕЛОВ ПОЗВОНОЧНИКА | 2015 |
|
RU2604047C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| МАССАЖНЫЙ ИНСТРУМЕНТ | 2013 |
|
RU2536118C2 |
Изобретение относится к области медицины и может быть использовано как в бытовых условиях, так и в медицинских стационарах в качестве лечебно-профилактического средства. Технический результат - повышение эффективности лечебного воздействия механического массажера. Механический массажер содержит массажные валики 5, рукоятку 2, пару осей 4, на которых с возможностью вращения вокруг них расположены массажные валики 5, и узел сочленения 1, с которым соединена ось 3 рукоятки и пара осей 4 с массажными валиками 5. В первом варианте массажные валики 5 установлены с возможностью перемещения вдоль своих осей 4 на величину, пропорциональную силе прижатия массажных валиков к телу. Во втором варианте оси 4 массажных валиков 5 соединены с узлом сочленения 1 с возможностью поворота вокруг оси, расположенной в полости узла сочленения перпендикулярно оси 3 рукоятки 1 в полости, в которой расположено устройство регулирования угла между осями 4 массажных валиков 5. 2 с. и 4 з.п.ф-лы, 5 ил.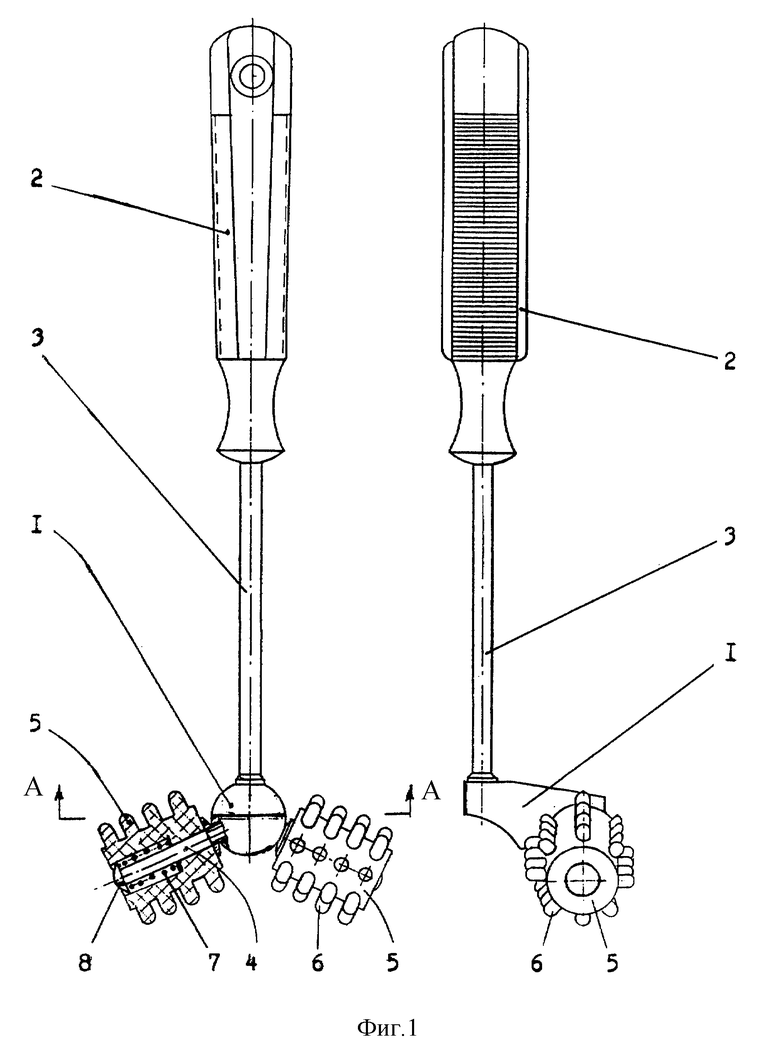
| US 5218955 А, 15.06.1993 | |||
| СПОСОБ РЕФЛЕКТОРНОГО ВОЗДЕЙСТВИЯ ПРИ ЛЕЧЕНИИ ВИБРАЦИОННОЙ БОЛЕЗНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2034529C1 |
| Короткая сеть дуговой электропечи | 1971 |
|
SU465758A1 |
| US 5868689 A, 09.02.1999. | |||

