Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении, в частности - автомобилестроении, и в станкостроении.
Известна инерционная муфта, содержащая ведущую полумуфту в виде вала с водилом, соосную с ней ведомую полумуфту в виде установленного на ведомом валу центрального зубчатого конического колеса, кинематически связанные между собой посредством размещенного на конце водила зубчатого конического сателлита, а также инерционные грузы в виде маховиков, жестко соединенных с сателлитом. Муфта снабжена по меньшей мере одним дополнительным водилом, размещенными на обоих концах водил с возможностью свободного вращения дополнительными коническими сателлитами с жестко соединенными с ними маховиками, а также по меньшей мере одним дополнительным, размещенным коаксиально основному, ведомым валом с установленным на нем дополнительным зубчатым коническим колесом, входящим в зацепление с дополнительными сателлитами (патент РФ 2053421, МПК 6 F 16 D 43/14, 1996, Бюл. 3).
У этой инерционной муфты, способной автоматически изменять частоту вращения ведомого вала в зависимости от приложенной к нему нагрузки, отсутствует внешняя опора (опора на корпус), что не позволяет трансформировать передаваемый вращающий момент.
Наиболее близким по совокупности признаков техническим решением к заявленной передаче является инерционная передача, содержащая корпус, соосные ведущий и ведомый валы, закрепленные на последних ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены сателлиты с маховиками. Передача снабжена жестко соединенным с корпусом опорным зубчатым колесом, введенным в зацепление с сателлитами, несущими маховики, и сблокированными по два сателлитами, внутренними и внешними относительно оси передачи, для зацепления с разными центральными коническими зубчатыми колесами и составляющими с ними пары конических колес, имеющих разные по величине передаточные отношения, ведущее и ведомое конические зубчатые колеса размещены по одну сторону от радиальных осей водила, а блоки сателлитов и сателлиты с маховиками размещены на радиальных осях водила с возможностью независимого друг от друга вращения (патент РФ 2072716, МПК 6 F 16 Н 33/10, 3/74, 1997, Бюл. 3).
У этой инерционной передачи по мере увеличения частоты вращения водила вокруг оси передачи и увеличения частоты вращения выходного вала понижается КПД и эффективность использования мощности двигателя, поскольку при этом уменьшается частота вращения сателлитов относительно центральной точки пересечения осей передачи и водила.
Предлагаемое изобретение при сохранении той же простоты устройства, что и у приведенного выше ближайшего аналога, обеспечивает расширение диапазона автоматического бесступенчатого изменения силового передаточного отношения между ведущим и ведомым валами в прямой зависимости от нагрузки на ведомом валу и в обратной зависимости от частоты вращения ведомого вала. Предложенная передача позволяет передавать вращающий момент с высокими показателями КПД при любых режимах работы, в том числе при неподвижном водиле, при минимальной частоте его вращения и при максимальной частоте вращения ведомого вала.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит корпус, соосные ведущий и ведомый валы, закрепленные на этих валах соответственно ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены основные и дополнительные сателлиты, первые из которых выполнены в виде сблокированных по два конических зубчатых колес, внутренних и внешних относительно оси передачи, находящихся в зацеплении с соответствующими разными центральными коническими зубчатыми колесами, дополнительные сателлиты введены в зацепление с закрепленным в корпусе центральным коническим зубчатым неподвижным опорным колесом. Ведущее и ведомое центральные конические колеса размещены по одну сторону от радиальных осей водила, а блоки основных сателлитов и дополнительные сателлиты размещены на радиальных осях водила с возможностью независимого друг от друга вращения. Согласно изобретению блоки основных сателлитов и дополнительные сателлиты выполнены с массивными ободами, придающими указанным сателлитам дополнительную массу, обеспечивающую выполнение ими одновременно функции инерционных грузов в виде маховиков.
Диаметры массивных ободов основных и дополнительных сателлитов превышают диаметры зубчатых венцов этих сателлитов.
Массивные ободы основных и дополнительных сателлитов выполнены в виде отдельных самостоятельных деталей, жестко соосно соединенных с соответствующими колесами указанных сателлитов.
Геометрические оси радиальных осей водила и геометрическая ось передачи пересекаются в центральной точке, совмещенной с этими осями.
Ведущее и ведомое центральные зубчатые колеса связаны механизмом свободного хода, ведущее звено которого жестко соединено с ведомым центральным зубчатым колесом, а ведомое звено - с ведущим центральным зубчатым колесом с обеспечением возможности передачи вращающего момента и вращения от ведомого вала на ведущий вал.
На приведенном чертеже дан общий вид автоматической бесступенчатой механической передачи (далее - передача) с показом ее элементов и отличительных признаков, характеризующих изобретение.
Передача содержит корпус 1, соосные ведущий 2 и ведомый 3 валы, закрепленные на этих валах соответственно ведущее 4 и ведомое 5 центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси О-О передачи водило 6 с радиальными осями 7, на которых с возможностью вращения установлены основные 8, 9 и дополнительные 10 сателлиты, первые из которых выполнены в виде сблокированных по два конических зубчатых колес, внутренних 8 и внешних 9 относительно оси О-О передачи, находящихся в зацеплении с соответствующими разными центральными коническими зубчатыми колесами 4 и 5. Дополнительные сателлиты 10 введены в зацепление с закрепленным в корпусе 1 центральным коническим зубчатым неподвижным опорным колесом 11. Ведущее 4 и ведомое 5 центральные конические зубчатые колеса размещены по одну сторону от радиальных осей 7 водила 6, а блоки основных сателлитов 8, 9 и дополнительные сателлиты 10 размещены на радиальных осях 7 водила с возможностью независимого друг от друга вращения. Блоки основных сателлитов 8, 9 и дополнительные сателлиты 10 выполнены с массивными ободами 12, придающими указанным сателлитам дополнительную массу, обеспечивающую выполнение ими одновременно функции инерционных грузов в виде маховиков.
Известно, что момент количества движения тела (материальной точки) относительно точки (полюса) равен векторному произведению радиус-вектора r, проведенного в это тело из точки, на вектор mv импульса тела (где m - его масса, а v - скорость). Указанная закономерность используется в предложенной передаче в целях обеспечения простоты устройства и уменьшения массы основных 8, 9, дополнительных 10 сателлитов и передачи в целом путем увеличения диаметров массивных ободов 12 по сравнению с диаметрами зубчатых венцов этих сателлитов.
С целью упрощения технологии изготовления основных 8, 9 и дополнительных 10 сателлитов с указанными выше массивными ободами 12 увеличенного диаметра с использованием при этом основного технологического оборудования в виде зубообрабатывающих станков упомянутые массивные ободы выполнены в виде отдельных самостоятельных деталей, жестко соосно соединенных с колесами указанных сателлитов.
Геометрические оси О1-О1 радиальных осей 7 водила 6 и геометрическая ось О-О передачи пересекаются в центральной точке 01, совмещенной с этими осями.
Ведущее 4 и ведомое 5 центральные зубчатые колеса связаны механизмом свободного хода 13, ведущее звено которого жестко соединено с ведомым центральным зубчатым колесом 5, а ведомое звено - с ведущим центральным зубчатым колесом 4 с обеспечением возможности передачи вращающего момента и вращения от ведомого вала 3 на ведущий вал 2.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении ведущего вала 2 и неподвижных ведомом вале 3 и ведомом колесе 5 в связи с приложенной к ведомому валу нагрузкой или началом вращения из неподвижного положения, установленное на ведущем валу ведущее колесо 4 приводит во вращение вокруг радиальных осей 7 водила находящиеся с ним в зацеплении внутренние колеса 8 основных сателлитов и сблокированные с этими колесами внешние колеса 9 основных сателлитов, которые перекатываются по находящемуся с ними в зацеплении неподвижному ведомому колесу и вовлекают водило 6 с его радиальными осями 7 во вращение вокруг оси О-О передачи с максимальной частотой в противоположном направлении по сравнению с направлением вращения ведущего вала. При указанном вращении водила 6 установленные на его радиальных осях 7 дополнительные сателлиты 10 перекатываются по закрепленному в корпусе 1 передачи неподвижному опорному колесу 11 и вращаются при этом на радиальных осях 7 водила с максимальной частотой.
Одновременное вращение основных 8, 9 и дополнительных 10 сателлитов вокруг оси О-О передачи и геометрических осей О1-О1 радиальных осей 7 водила 6 равнозначно их вращению относительно центральной точки 01 пересечения указанных осей.
Известно, что момент количества движения при вращении тела относительно точки является векторной величиной и направление этого вектора совпадает с направлением оси вращения непосредственно тела, в данном случае с направлением радиальных геометрических осей О1-О1 водила 6 ("Политехнический словарь" под ред. академика Ишлинского А. Ю. , изд. "Советская энциклопедия", М. - 1980, с. 310/2). Но поскольку оси О1-О1 водила 6 совершают вращение вокруг оси О-О передачи, направление векторов моментов количества движения сателлитов 8, 9 и 10 постоянно изменяется.
Известно также, что действия над векторами являются отражением соответствующих действий над векторными величинами, а векторные величины являются равными, если совпадают их числовые значения и направления (см. там же стр. 73/1).
Момент количества движения тела проявляется с соблюдением всеобщего физического закона сохранения и может быть изменен только под действием внешних сил. Проявление указанного всеобщего закона сохранения у вращающихся относительно центральной точки 01 сателлитов 8, 9 и 10 противодействует вращению радиальных осей 7 водила 6 вокруг оси О-О передачи. В связи с этим упомянутые радиальные оси 7 водила 6 являются опорами для передачи вращающего момента от ведущего вала 2 и ведущего колеса 4 через блок основных сателлитов 8, 9 на ведомое колесо 5 и ведомый вал 3.
При неподвижном ведомом вале 3 вращающий момент на него передается за счет принудительного изменения моментов количества движения как основных 8, 9, так и дополнительных 10 сателлитов, которые совершают вращательное движение относительно центральной точки 01 с максимальной частотой. Это обеспечивает условия для передачи максимального по величине вращающего момента на неподвижный ведомый вал 3 в одном направлении с ведущим валом 2.
С началом вращения ведомого вала 3 в одном направлении с ведущим валом 2 и по мере увеличения частоты его вращения, замедляется вращение водила 6 вокруг оси О-О передачи и одновременно замедляется вращение основных 8, 9 и дополнительных 10 сателлитов вокруг радиальных осей 7 водила и относительно центральной точки 01 с соответствующим уменьшением создаваемого ими тормозящего момента силы, приложенного к водилу 6. При этом величина вращающего момента, передаваемого на ведомый вал, будет находиться в обратной зависимости от частоты вращения ведомого вала 3.
При неподвижном водиле 6 дополнительные сателлиты 10 будут также неподвижны и не создают тормозящего момента силы, а поэтому не будут принимать участия в передаче вращающего момента на ведомый вал 3. Основные сателлиты 8, 9 при этом будут совершать вращение вокруг радиальных осей 7 водила, поскольку они находятся в зацеплении с вращающимся ведущим колесом 4. В связи с указанным вращением основных сателлитов 8, 9 они подобно гироскопу будут противодействовать вращению водила 6 и его радиальных осей 7 вокруг оси О-О передачи, а поэтому водило и его радиальные оси будут являться опорой для передачи вращающего момента на ведомый вал 3.
Максимальная частота вращения ведомого вала 3 не может превышать частоту вращения ведущего вала 2, поскольку при равной частоте вращения этих валов в одном направлении происходит замыкание механизма свободного хода 13 и все составное части передачи будут совершать вращение вокруг оси О-О с одинаковой частотой как единое целое. Основные сателлиты 8, 9 при этом будут совершать вращение только вокруг оси О-О передачи, а поэтому не будут создавать тормозящего этому вращению момента силы. Вместе с тем, в связи с вращением водила 6 вокруг оси О-О передачи дополнительные сателлиты 10 будут перекатываться по неподвижному опорному колесу 11 и совершать при этом вращение одновременно вокруг геометрических осей О1-О1 радиальных осей 7 водила и оси О-О передачи, а следовательно - относительно центральной точки 01. Создаваемый при этом тормозящий момент силы противодействует вращению водила 6 и его радиальных осей 7 вокруг оси О-О передачи и обеспечивает передачу вращающего момента от ведущего вала 2 на ведомый вал 3.
Следовательно, предложенная передача будет надежно трансформировать передаваемый вращающий момент с плавным бесступенчатым изменением частоты вращения ведомого вала 3 в зависимости от приложенной к нему нагрузки при любой частоте вращения этого вала.
При необходимости передачи вращающего момента и вращения от ведомого вала на ведущий вал 2 с целью торможения рабочей машины, работа двигателя прекращается. При этом под воздействием вращающего момента, передаваемого от ведомого вала 3 происходит замыкание механизма свободного хода 13, который обеспечивает надежную передачу потока мощности непосредственно от ведомого вала 3 на ведущий вал 2 через закрепленные на этих валах ведомое 5 и ведущее 4 колеса и далее на двигатель, принудительное вращение вала которого приводит к торможению рабочей машины. Таким же образом производится запуск двигателя с применением буксировки рабочей машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178107C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2277654C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277655C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247885C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2188975C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172877C2 |
Изобретение относится к машиностроению. Ведущее 4 и ведомое 5 центральные конические зубчатые колеса находятся в зацеплении соответственно с внутренними 8 и внешними 9 относительно геометрической оси О-О передачи колесами основных сателлитов, размещенных на радиальных осях 7 водила 6. Дополнительные сателлиты 10, размещенные аналогично основным сателлитам, введены в зацепление с закрепленным в корпусе 1 передачи центральным коническим зубчатым неподвижным опорным колесом 11. Основные 8, 9 и дополнительные 10 сателлиты выполнены с массивными ободами 12, придающими указанным сателлитам дополнительную массу, обеспечивающую выполнение ими одновременно функций инерционных грузов в виде маховиков. Обеспечивается плавное автоматическое бесступенчатое изменение передаваемого вращающего момента и частоты вращения ведомого вала. 4 з. п. ф-лы, 1 ил.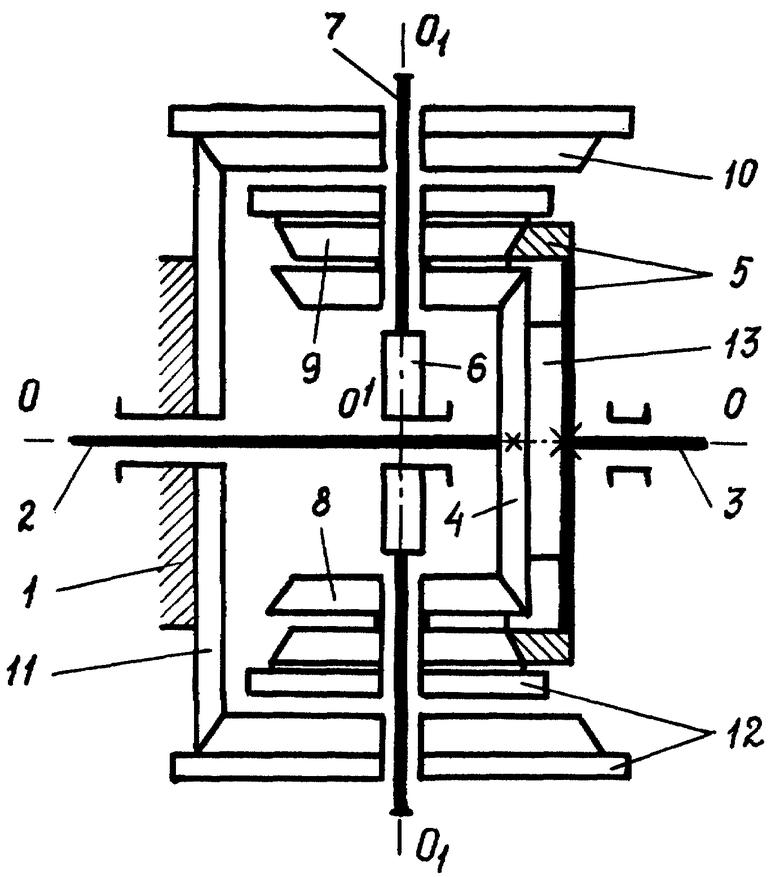
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072716C1 |
| ИНЕРЦИОННАЯ АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА | 1994 |
|
RU2072208C1 |
| RU 2063569 С1, 10.07.1996. | |||

