Изобретение относится к общему машиностроению и может быть использовано в транспортном машиностроении, преимущественно в автомобилестроении, а также в станкостроении.
Известна инерционная муфта, ведущая полумуфта у которой выполнена в виде ведущего вала и водила в виде рамки, несущей на подшипниках радиальные валы с сателлитами и инерционными грузами. Не ведомом валу установлено центральное коническое колесо, входящее в зацепление с сателлитами. Центральное колесо выполнено в виде обода, внутри которого размещена рамка с маховиками, при этом приведенные массы обоих маховиков равны и сосредоточены в точке пересечения линий осей муфты и маховиков (см. патент РФ 2047017, МПК 6 F 16 D 43/14, 27.10.95).
Недостатком этой инерционной муфты является отсутствие внешней опоры при передаче вращающего момента, что исключает возможность его изменения в зависимости от нагрузки на ведомом валу.
Наиболее близким по совокупности признаков техническим решением к заявленному изобретению является автоматическая бесступенчатая механическая передача, содержащая ведущее и ведомое центральные конические зубчатые колеса, введенные в зацепление с коническими основными сателлитами, размещенными на радиальных осях водила. Размещенные там же конические дополнительные сателлиты введены в зацепление с коническим центральным неподвижным опорным колесом. Водило размещено между центральными ведущим и ведомым колесами с возможностью свободного вращения вокруг линии оси передачи на ведущем или ведомом валу. Основные и дополнительные сателлиты размещены на радиальных осях водила с возможностью независимого друг от друга вращения (см. патент РФ 2178107, МПК 7 F 16 Н 33/14, 3/74, 10.01.2002. Бюл. № 1).
Недостатком этой автоматической бесступенчатой механической передачи является размещение массивных сателлитов, выполняющих роль маховиков или инерционных грузов, в стороне от линии оси передачи, что приводит к возникновению больших центробежных сил при их вращении вокруг линии оси передачи и создает необходимость усиления всех элементов передачи с соответствующим усложнением устройства и увеличением их массы.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в уменьшении динамических нагрузок на элементы передачи с обеспечением возможности уменьшения при этом прочности этих элементов, а соответственно, и их массы.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит размеренное с возможностью вращения вокруг линии оси передачи водило, несущее диаметральный относительно линии оси передачи стержень, размещенные по разные стороны от водила и диаметрального стержня конические ведущее и ведомое колеса, закрепленные соответственно на ведущем к ведомом валах, размещенные с возможностью свободного вращения на диаметральном стержне конические основные сателлиты, введенные в зацепление с упомянутыми ведущим и ведомым колесами, жестко соединенное с корпусом передачи коническое зубчатое центральное колесо. Согласно изобретению водило выполнено в виде рамочного корпуса, внутри которого размещен инерционный груз в виде маховика, закрепленного на диаметральном стержне, который является валом маховика, на одном из концов упомянутого вала маховика закреплен дополнительный сателлит, введенный в зацепление с опорным колесом, вал маховика связан с водилом с возможностью свободного вращения.
Центр массы маховика совмещен с линией оси передачи.
Основные сателлиты выполнены с массивными ободами.
Линия оси передачи и продольная линия вала маховика пересекаются в центральной точке, совмещенной с упомянутыми линиями.
Как частный случай выполнения, основные сателлиты выполнены в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, внутреннего и внешнего относительно линии оси передачи, одно из которых находится в зацеплении с ведущим колесом, а другое - с ведомым колесом, и указанные зацепляющиеся пары колес имеют разные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов выполнен в виде одного зубчатого колеса и находится в зацеплении одновременно с ведущим и ведомым колесами, образуя при этом с каждым из них пары колес, имеющие одинаковые по величине передаточные отношения.
Передача снабжена размещенным на линии оси передачи механизмом свободного хода, ведущий элемент которого связан с водилом или валом маховика, а ведомый элемент закреплен в корпусе и не допускает вращение водила вместе с маховиком и его валом вокруг линии оси передачи в направлении вращения ведомого вала.
На валу маховика с противоположной стороны от дополнительного сателлита закреплен уравновешивающий его относительно линии оси передачи груз.
На приведенном чертеже дан общий вид автоматической бесступенчатой механической передачи (далее - передача) с показом ее элементов и отличительных признаков, характеризующих изобретение.
Передача содержит размещенное с возможностью вращения вокруг линии оси О-О передачи водило 1, несущее диаметральный относительно линии оси передачи стержень 2, размещенные по разные стороны от водила и диаметрального стержня конические зубчатые ведущее 3 и ведомое 4 колеса, закрепленные соответственно на ведущем 5 и ведомом 6 валах, размещенные с возможностью свободного вращения на диаметральном стержне 2 конические основные сателлиты 7, 8, введенные в зацепление с упомянутыми ведущим и ведомым колесами, жестко соединенное с корпусом 9 передачи коническое зубчатое центральное опорное колесо 10. Водило 1 выполнено в виде рамочного корпуса, внутри которого размещен инерционный груз в виде маховика 11, закрепленного на диаметральном стержне 2, который является валом маховика. На одном из концов упомянутого вала и маховика закреплен дополнительный сателлит 12, введенный в зацепление с опорным колесом 10. Вал 2 маховика связан с водилом 1 с возможностью свободного вращения.
Центр массы маховика 11 совмещен с линией оси О-О передачи.
Основные сателлиты 7, 8 выполнены с массивными ободами.
Линия оси О-О передачи и продольная линия О1-О1 вала 2 маховика пересекаются в центральной точке O1, совмещенной с упомянутыми линиями.
Как частный случай выполнения, основные сателлиты выполнены в виде жестко соосно соединенных между собой в единый блок двух зубчатых конических колес, внутреннего 7 и внешнего 8 относительно линии оси О-О передачи. Одно из указанных колес находится в зацеплении с ведущим колесом 3, а другое - с ведомым колесом 4, и указанные зацепляющиеся пары колес имеют равные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов 7, 8 выполнен в виде единого зубчатого колеса и находится в зацеплении одновременно с ведущим 3 и ведомым 4 колесами, образуя при этом с каждым из них пары колес, имеющие одинаковые по величине передаточные отношения.
Передача снабжена размещенным на линии оси О-О передачи механизмом свободного хода 13, ведущий элемент которого связан с водилом 1 или валом 2 маховика, а ведомый элемент закреплен в корпусе 9 передачи и не допускает вращения водила вместе с маховиком 11 и его валом вокруг линии оси О-О передачи в направлении вращения ведомого вала 6.
На валу 2 маховика с противоположной стороны от дополнительного сателлита 12 закреплен уравновешивающий его относительно линии оси О-О передачи груз 14.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении ведущего вала 5 и неподвижном ведомом вале 6 и ведомом колесе 4 в связи с приложенной к ведомому валу нагрузкой или началом вращения из неподвижного положения установленное на ведущем валу 5 ведущее колесо 3 приводит во вращение вокруг вала 2 маховика 11 сблокированные между собой основные сателлиты 7, 8. При этом внешний основной сателлит 8 перекатывается по находящемуся с ним в зацеплении неподвижному ведомому колесу 4 и вовлекает водило 1 вместе с размещенным в нем маховиком 11 и его валом 2 во вращение вокруг линии оси О-О передачи с максимальной частотой в направлении вращения ведущего вала 5. При указанном вращении водила 1 и вала 2 маховика установленный на конце вала маховика дополнительный сателлит 12 перекатывается по закрепленному в корпусе 9 передачи неподвижному опорному колесу 10 и вращается при этом с максимальной частотой вместе с маховиков 11 и его валом 2 вокруг продольной линии О1-О1 вала маховика.
Одновременное вращение маховика 11 и основных сателлитов 7, 8 вокруг линии оси O-O передачи и продольной линии О1-О1 вала 2 маховика равнозначно их вращению относительно центральной точки О1 пересечения упомянутых линий.
Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением всеобщего закона сохранения, согласно которому момент количества движения может быть изменен только под воздействием моментов внешних сил. Известно также, что момент количества движения при вращении тела относительно точки является векторной величиной (см. "Политехнический словарь" под ред. академика А.Ю.Ишлинского. М.: "Советская энциклопедия", 1980, стр.310/2). При вращении маховика 11 и основных сателлитов 7, 8 указанным выше порядком относительно центральной точки О1 векторы их моментов количества движения постоянно изменяют свое направление. Известно, что действия над векторами являются отражением соответствующих действий над векторными величинами (см. там же, стр.73/1, статья "Вектор").
Проявление указанного всеобщего закона сохранения у вращающихся относительно центральной точки O1 маховика 11 и основных сателлитов 7, 8 противодействует вращению вала 2 маховика вокруг линии оси O-O передачи. В связи с этим вал и маховика является опорой для передачи вращающего момента от ведущего вала 5 и ведущего колеса 3 через основные сателлиты 7, 8 на ведомое колесо 4 и ведомый вал 6. Вращающий момент от ведущего вала 5 на ведомый вал 6 передается во взаимно противоположном направлении.
Указанное выше вращение с максимальной частотой маховика 11, а также вращение основных сателлитов 7, 8 относительно центральной точки O1 при неподвижном ведомом вале 6 обеспечивает передачу на ведомый вал максимального по величине вращающего момента, поскольку изменение направлений их векторов моментов количества движения происходит с максимальной частотой. При этом принимается во внимание, что основные сателлиты 7, 8 снабжены массивными ободами и при вращении играют роль маховиков (инерционных грузов).
С началом вращения ведомого вала 6 замедляется вращение дополнительного сателлита 12 и маховика 11 с его валом 2 относительно линии оси O-O передачи и продольной линии O1-О1 вала маховика. Это приводит к замедлению вращения маховика II относительно центральной точки O1 с соответствующим уменьшением создаваемого им тормозящего момента силы, противодействующего вращению вала 2 маховика вокруг линии оси O-O передачи. Вместе с тем, в связи с вращением ведущего и ведомого колес в противоположных направлениях. частота вращения находящихся с ними в зацеплении основных сателлитов 7, 8 вокруг продольной линии О1-О1 вала маховика при этом возрастает, и одновременно продолжается вращение упомянутых сателлитов 7, 8 вокруг линии оси O-O передачи и относительно центральной точки O1, что обеспечивает передачу вращающего момента и вращения от ведущего вала 5 на ведомый вал 6.
При максимальной частоте вращения ведомого вала 6 водило 1 и маховик 11 со своим валом 2 неподвижны. Однако массивные ободы вращающихся с максимальной частотой основных сателлитов 7, 8 оказывают противодействие вращению вала 2 маховика вокруг линии оси О-О передачи, поскольку любые их повороты относительно линии оси О-О передачи являются при данных условиях вращением вала 2 маховика относительно центральной точки O1. При этом создается опора для передачи вращения и вращающего момента от ведущего вала 5 и ведущего колеса 3 на ведомое колесо 4 и ведомый вал 6 через вращающиеся основные сателлиты 7, 8.
Применение блока основных сателлитов 7, 8 (пункт 5 формулы изобретения) расширяет пределы возможного автоматического регулирования передаваемого вращающего момента. При единичном основном сателлите (пункт 6 формулы изобретения) упрощается устройство передачи при одновременном некотором уменьшении возможного интервала регулирования передаваемого вращающего момента.
Следовательно, предложенная передача функционирует при любом режиме работы.
При необходимости передачи вращающего момента и вращения от ведомого вала 6 на ведущий вал 5 с целью торможения рабочей машины работа двигателя прекращается. При этом под воздействием вращающего момента, передаваемого от вращающегося ведомого вала 6, происходит замыкание механизма свободного хода 13, который не допускает вращения вала 2 маховика в одном направлении с ведомым валом 6, что обеспечивает передачу вращения от ведомого вала на ведущий вал 5 и далее на рабочий вал двигателя, принудительное вращение которого приводит к торможению рабочей машины. Таким же образом производится запуск двигателя с применением буксировки рабочей машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172878C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ИНЕРЦИОННАЯ ПЕРЕДАЧА | 2000 |
|
RU2163316C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174200C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| ИНЕРЦИОННАЯ АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА | 1993 |
|
RU2068135C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171932C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171933C2 |
Изобретение относится к транспортному машиностроению, станкостроению. На соосных ведущем 5 и ведомом 6 валах установлены соответственно ведущее 3 и ведомое 4 конические зубчатые колеса. Колеса 3 и 4 введены в зацепление с оснащенными массивными ободами основными сателлитами 7, 8, размещенными с возможностью свободного вращения на валу 2 маховика 12. На одном конце вала 2 закреплен дополнительный сателлит 12, зацепленный с закрепленным в корпусе 9 передачи коническим центральным опорным колесом 10. Между колесами 3 и 4 размещено с возможностью свободного вращения водило 1, выполненное в виде рамочного корпуса, в котором размешен инерционный груз в виде закрепленного на валу 2 маховика 12. Центр массы маховика 12 совмещен с линией оси O-O передачи. При вращении маховика и основных сателлитов с принудительным изменением направлений векторов их моментов количества движения возникает тормозящий момент силы, который противодействует вращению вала 2 маховика вокруг линии оси O-O передачи и обеспечивает передачу вращающего момента и вращения от ведущего вала на ведомый вал с автоматическим плавным изменением передаточного отношения в зависимости от нагрузки на ведомом валу. Технический результат - уменьшение динамических нагрузок на элементы передачи. 7 з.п. ф-лы, 1 ил.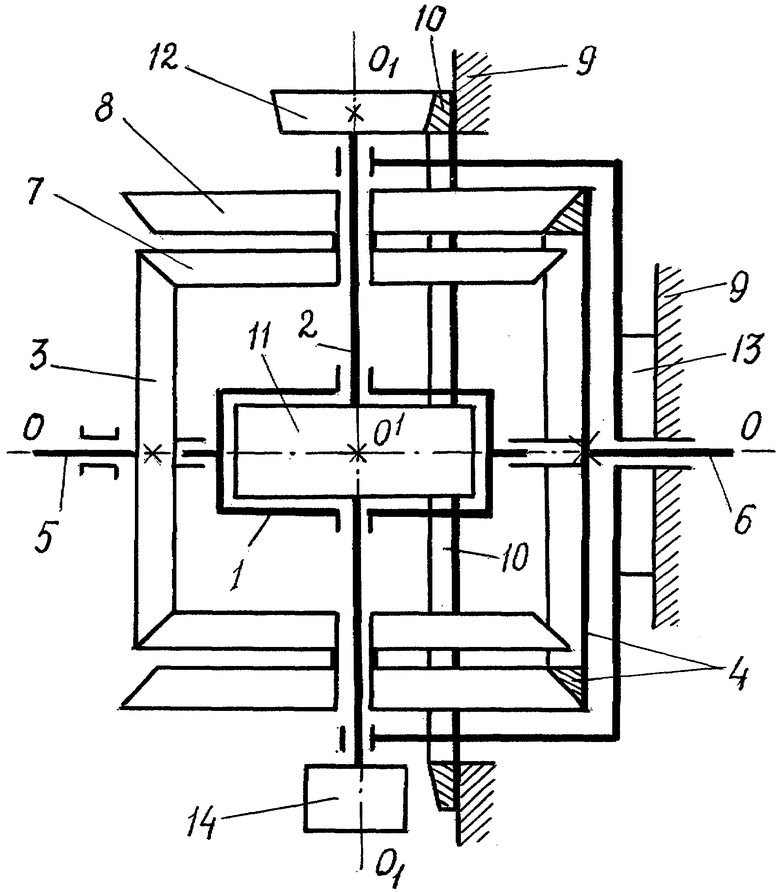
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178107C2 |
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072715C1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |

